无源测向定位算法
- 格式:pdf
- 大小:92.43 KB
- 文档页数:2
多站虚拟量测变换均值无源定位算法何友;王本才【期刊名称】《数据采集与处理》【年(卷),期】2012(027)001【摘要】在多站无源均值定位算法中,为了解决部分传感器间夹角过大或过小所导致的定位精度下降问题,提出一种基于虚拟量测变换的多传感器管理无源定位算法.首先在全局坐标系下分析了传感器间夹角对误差几何稀释度(GDOP)的影响,进而得到双站获得较好定位精度的夹角约束关系;其次针对不满足该约束关系的传感器组合提出一种虚拟量测变换定位算法,通过空间管理的方法达到对传感器的优化布站,并结合算法的实施步骤对其原理及特点进行了理论分析,尤其对变换前后的交点精度进行了比较.仿真结果表明虚拟量测算法的定位精度要明显优于均值算法,进而说明该算法的有效性及传感器管理在多站无源定位中的重要作用.%A multi-sensor management passive localization algorithm based on virtual measurement transform (VMT) is presented to solve the localization precision descending problem in mean estimation (ME) algorithm when the cut angles between partial sensor pairs are too small or big in a multi-sensor system. The effect of cut angle on the geometric dilution of precision (GDOP) is firstly analyzed in global coordinate system, and the cut angle restriction relationship is obtained, from which the better localization precision of dual-sensor system can be achieved. Then, the VMT localization algorithm is presented when certain sensor pairs do not satisfy the above restriction relationship, which can deploy sensor in an optimalway by means of sensor space management. The principle and characteristics of the algorithm are analyzed, especially the intersection precision after and before transform are compared with the perspective of GDOP. Simulation results indicate that the performance of VMT algorithm excels that of ME algorithm. It verifies the effectiveness of the algorithm and the important role of sensor management in multi-sensor passive localization.【总页数】7页(P13-19)【作者】何友;王本才【作者单位】海军航空工程学院信息融合技术研究所,烟台,264001;海军航空工程学院信息融合技术研究所,烟台,264001【正文语种】中文【中图分类】TN953+.5;TN953+.7【相关文献】1.多运动站测角频差无源定位方法研究 [J], 贾兴江;周一宇;郭福成2.距离伪量测的空基平台单站无源定位算法 [J], 武宜川;潘冠华3.双站无源均值定位算法精度分析 [J], 王本才;何友;王国宏;修建娟4.基于虚拟基线的邻近多站无源定位技术 [J], 肖龙;胡来招5.一种具有角速度量测的多站无源目标跟踪方法 [J], 张蛟;邢士勇;王建华;李茂;陆建峰因版权原因,仅展示原文概要,查看原文内容请购买。
基于测向阵列的空中飞行器瞬时无源定位摘要:本文提出了一种空中飞行器瞬时无源定位方法,通过对测向阵列测得数据的分析,建立了相应的数学模型,然后采用遗传算法进行计算,实现了基于测向阵列的空中飞行器瞬时无源定位。
计算结果表明:应用该方法可以精确地计算出空中飞行器的位置参数,从而实现对飞行器的准确无源定位,该方法在精度上能满足实际定位精度的要求,误差较小。
关键词:数学模型;飞行器;无源定位中图分类号:p228.1 文献标识码:a 文章编号:1006-4311(2013)15-0215-030 引言目标无源定位技术具有作用距离远、隐蔽接收、不易被对方发觉等优点,它对于提高目标系统在电子战环境下的生存能力和作战能力有着至关重要的作用[1]。
另外,目标无源定位技术是导航与制导技术的重要基础。
在现有的导航与制导技术中,依靠卫星定位是精度最高也是较为理想的目标无源定位方法。
它的基本原理是目标接收机通过接收多颗卫星的信号测量出目标距各卫星的距离,然后再通过一定的计算方法确定出目标的位置。
本文考虑通过测向阵列测量飞行器与地球同步卫星的方向角来实现空中飞行器的自定位。
1 目标无源定位的基本思路1.1 相关分析及假设为了确定空中飞行器的位置参数,以地球球心为原点建立地心坐标系。
根据图1所示,由测向列阵向量d1d2和地球同步卫星与飞行器连线的夹角关系建立非线性方程组。
其中d1(d1x,d1y,d1z)、d2(d2x,d2y,d2z)相互垂直关系始终不变作为约束条件,进而利用牛顿迭代法和遗传算法的思想运用matlab进行非线性方程组的求解。
为了减少其它条件对模型的干扰,我们假设:①将飞行器和地球同步卫星均视为质点。
②假设地球是一个圆球,忽略地轴偏角。
③同步卫星到地球球心坐标系的距离都相等。
④假设问题一中飞行器是相对地球模型静止的。
⑤假设飞行器处于赤道面以上。
1.2 地心直角坐标系的建立以地心o为坐标原点建立地心直角坐标系,其中z轴穿过地球模型的南、北极点并与地轴(旋转轴)相重合;x轴与本初子午面和赤道的交线重合;y轴在赤道面上与x 轴垂直,构成右手直角坐标系0-xyz。
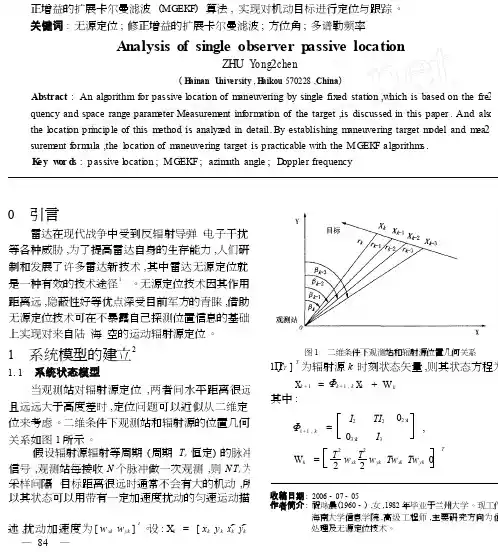
正增益的扩展卡尔曼滤波 (MGEKF ) 算法 , 实现对机动目标进行定位与跟踪 。
关键词 : 无源定位 ; 修正增益的扩展卡尔曼滤波 ; 方位角 ; 多谱勒频率A nalysis of single observer p assive locationZH U Y ong 2chen( H a i nan U niv ersity , H a i kou 570228 , C hina )Abstract : An algorithm for passive l ocati on of m aneuvering by single fixed stati on ,which is based on the fre 2 quency and space range param eter Measurem ent inform ati on of the target ,is discussed in this paper . And als o the l ocati on principle of this m ethod is analyz ed in detail . By establishing m aneuvering target m odel and m ea 2 surem ent form ula ,the l ocati on of m aneuvering target is practicable with the MGEK F algorithm s. K ey w or d s : passive l ocati on ; MGEKF ; azim uth angle ; D oppler frequency0 引言雷达在现代战争中受到反辐射导弹 、电子干扰等各种威胁 ,为了提高雷达自身的生存能力 ,人们研 制和发展了许多雷达新技术 ,其中雷达无源定位就是一种有效的技术途径1。
辐射源无源定位研究辐射源无源定位研究引言辐射源无源定位是一种通过接收来自辐射源的信号,在无需辐射源自身参与的情况下,利用定位系统对辐射源进行准确定位的技术。
辐射源的无源定位在工业、医疗、军事等多个领域都具有重要的应用价值。
本文将对辐射源的无源定位研究进行探讨,并介绍几种常见的无源定位算法。
一、辐射源无源定位的重要性辐射源的无源定位技术对于防止辐射源的泄漏、快速应对辐射事故以及确保人员安全具有重要意义。
在一些高危环境下,如核电站、辐射医学实验室等,及时准确地定位辐射源,是保障工作人员的生命安全和周围环境稳定的关键措施。
二、无源定位方法的研究现状1. 空间定位法空间定位法是利用接收器在不同的空间位置接收到辐射源信号的强度变化,从而推算出辐射源的位置。
通过多个接收器的组合,可以提高定位的精度。
目前,常见的空间定位法有最小二乘法、加权最小二乘法等。
2. 方向定位法方向定位法是通过接收器接收到的辐射源信号的方向来确定辐射源的位置。
基于到达角度的方向定位法是常见的一种方法。
该方法利用接收器测量到的辐射源信号到达角度,从而计算出辐射源的位置。
3. 时间定位法时间定位法是基于接收器接收到辐射源信号的时间差异来确定辐射源的位置。
通过测量信号到达不同接收器间的时间差,可以利用三角定位法或者TDOA(Time Difference ofArrival)等算法计算出辐射源的位置。
三、无源定位研究的局限性辐射源无源定位的研究也存在一些局限性。
首先,定位精度受到环境的影响较大,如建筑物、电磁干扰等都会影响定位结果的准确性。
其次,无源定位技术需要配备复杂的接收器设备,增加了系统的成本和工程难度。
此外,无源定位算法对于密集辐射源的定位效果较差,需要进一步改进。
四、无源定位技术的发展趋势随着无线通信技术的发展,在辐射源无源定位技术上也出现了一些新的趋势。
首先,利用物联网技术,可以实现辐射源的实时在线监测和定位。
其次,利用机器学习和深度学习等人工智能技术,可以提高无源定位算法的准确性和稳定性。
MUSIC算法在无源测向技术中的研究的开题报告
一、选题背景
无源测向(PSD)技术是近年来无线通信领域中的一个研究热点,其主要应用于无线通信系统中的信号定位、跟踪和识别,这种技术已经广泛应用于军事、航空、导航、室内定位、车联网、智能手机等领域。
在PSD技术中,MUSIC算法是一种经典的谱估计方法,适用于具有噪声和有限自由度的信号参数估计,然而,MUSIC算法的时间和空间复杂度随着信号源数量的增加而增加,这成为了该算法在实际应用中面临的主要挑战之一。
二、课题意义
本文将以MUSIC算法为基础,研究其在PSD技术中的应用和改进,旨在提高算法的性能和效率,为无线通信系统的定位、跟踪和识别等问题提供更加精准、高效、可靠的解决方案。
三、研究目的
1.掌握MUSIC算法的基本原理和基础知识;
2.研究MUSIC算法在PSD技术中的应用和改进方法;
3.分析和比较已有的MUSIC算法变体方法,并探索其优化空间;
4.验证改进后的MUSIC算法在噪声环境中的定位精度和计算效率;
5.进行仿真实验并比较其结果,评估改进算法的性能和实用性。
四、论文内容和结构
本文将分为六个部分:
第一部分:介绍课题背景和研究意义。
第二部分:介绍PSD技术的基本理论和MUSIC算法的原理。
第三部分:介绍MUSIC算法在PSD技术中的应用和变体方法的研究情况。
第四部分:提出改进的MUSIC算法模型,并进行详细的算法分析和实现。
第五部分:通过仿真实验验证改进算法的定位精度和计算效率。
第六部分:论文总结和展望。
海上侦察船的纯方位无源定位技术研究海上侦察船能较长时间在海洋上对港岸目标或海上舰船实施电子侦察, 有利于提早发现敌方舰船动向, 在军事作战中占据优势。
传统侦察船在目标识别时多采用有源定位方式, 通过发射雷达信号等获取地方舰船确切位置。
有源定位方式隐蔽性较差, 很容易暴露自己[1]。
与有源定位方式相比, 无源探测定位技术具有下列优点:1) 无源探测定位技术本身不发射信号, 因此隐蔽性强, 不易被对方捕获;2) 抗干扰能力强, 可提取监测目标的航速、位置、舰船规模等多种信息;3) 可探测隐身目标, 安全性能高。
本文建立了监测目标的非线性运动模型, 研究了无源定位技术的数据关联技术和估计算法, 有效改进了侦察船纯方位无源定位技术的性能。
1 无源定位技术的目标建模侦察船对海上目标的识别和定位是二维的, 因此, 本文在二维直角坐标系下建立无源定位的运动模型如图1所示。
如图, 假定侦察船的位置、速度、加速度分别为r1, v1和a1, 目标船的位置、速度、加速度分别为r2, v2和a2, 目标船相对于侦察船的相对运动速度和加速度分别为v21和a21。
则静止条件下, 无源定位系统的微分方程如下式:当目标处于匀加速运动时, 无源定位系统方程如下:2 海上侦察船的纯方位无源定位技术研究2.1 无源定位观测系统的位置估计算法船舶纯方位无源定位系统在目标定位时需要采集大量的位置信号、航速信号等, 并经过数据融合才能获得准确的目标船舶位置。
因此, 无源定位观测系统是个非线性系统, 寻找合理的位置估计算法可以有效提高船舶定位的效率。
本文主要利用了反步算法对监测船的位置进行估计, 该算法的核心是把非线性系统分解为多个子系统, 并利用Lyapunov函数[2]的选取功能进行位置信息筛选, 该位置估计算法的流程如下:首先, 假设无源定位系统的方位信号输入量为 (x1, x2, ..., x n) , 位置输出量为y (t) , 形式如下:式中:f n为相对位置的非线性函数;δ为校正系数。
无人机遂行编队飞行中的纯方位无源定位解题过程无人机编队飞行中的纯方位无源定位是指无人机仅依靠周围的环境信息,通过收集和处理这些信息来实现无源定位。
本文将介绍纯方位无源定位的一般解题过程,并举例说明。
无人机的纯方位无源定位依赖于接收到的无线信号,通过收集周围的信号强度和时间差等信息来确定无人机的位置。
具体解题过程可以分为信号收集、信号处理和定位计算三个步骤。
首先是信号收集阶段。
在这一阶段,无人机需要搭载能够接收指定频段信号的无线电设备,并设定相应的接收参数。
可以通过接收多个信号源(如基站)的信号来实现多点定位。
无人机按照预定的航线进行飞行,同时持续收集周围的信号数据,包括信号强度、到达时间等。
接下来是信号处理阶段。
在这一阶段,收集到的信号数据需要经过一系列处理操作来提取有用的信息。
首先,对收集到的信号进行预处理,包括滤波、去噪等操作,以提高信号质量。
然后,可以使用信号处理算法(如相关算法)来估计信号的到达时间差等信息。
通过计算信号到达时间差,可以实现不同信号源间的距离差异,从而提供定位所需的数据。
最后是定位计算阶段。
在这一阶段,根据收集到的信号数据和信号处理得到的信息,可以进行定位计算。
定位计算可以采用多种方法,如最小二乘法、加权最小二乘法等。
通过将信号到达时间差转化为距离差异,并利用多点定位的原理,即通过多个信号源的距离差异实现定位,可以得到无人机的位置坐标。
下面以一个简单的例子来说明纯方位无源定位的解题过程。
假设有两个基站A和B,无人机在基站A和B之间飞行,并收集到两个基站的信号数据。
首先,在信号收集阶段,无人机搭载了能够接收A和B基站信号的无线电设备,并按照预定航线进行飞行,收集到了A基站和B基站的信号数据,包括信号到达时间和信号强度。
然后,在信号处理阶段,对收集到的信号数据进行处理,可以得到A基站和B基站信号的到达时间差。
假设A基站信号到达时间比B基站信号晚10微秒。
同时,还可以通过信号强度来估计距离差异。