柔性机械臂动力学建模
- 格式:docx
- 大小:19.26 KB
- 文档页数:3

机械臂系统的动力学建模与分析苏华勇,李海艳(广东工业大学机电工程学院,广州510006)摘要:机械臂在工业各领域中应用较广泛,目前的发展趋势要求机械臂的材料更轻质、运动精度更高。
对机械臂的动力学特性及在工作过程中产生的弹性变形进行研究,通过拉格朗日法建立机械臂系统动力学模型并进行分析。
该动力学模型比以往的分析方法更加准确,模型没有舍弃小变形量对模型的贡献,并探讨了不同阶数离散近似弹性变形对动力学模型的影响。
仿真表明,选取不同阶数的基函数近似弹性变形对模型求解的准确度影响不大;分析机械臂动力学特性有必要考虑弹性变形对系统的影响。
关键词:机械臂;动力学建模;弹性变形;数值仿真中图分类号:TP241文献标志码:A文章编号:1009-9492(2020)07-0120-03Modeling and Analysis of Manipulator System DynamicsSU Huayong ,LI Haiyan(Department of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China )Abstract:Manipulator is widely used in various fields of industry.The current development trend requires that the material of manipulator is lighter and themotion precision is higher.The dynamic characteristics of the manipulator and the elastic deformation in the working process were studied.The dynamic model ofthe manipulator system was established and analyzed by Lagrange method.The dynamic model was more accurate than the previous analysis methods.The contribution of small deformation to the model was not abandoned.The influence of different order discrete approximate elastic deformation on the dynamic model was discussed.The simulation results show that choosing different order basis functions to approximate elastic deformation has little influence on the accuracy of the model solution,and it is necessary to consider the influence of elastic deformation on the system when analyzing the dynamic characteristics of the manipulator.Key words:manipulator;dynamic modeling;elastic deformation;numerical simulationDOI:10.3969/j.issn.1009-9492.2020.07.041第49卷第07期Vol.49No.07机电工程技术MECHANICAL &ELECTRICAL ENGINEERING TECHNOLOGY苏华勇,李海艳.机械臂系统的动力学建模与分析[J ].机电工程技术,2020,49(07):120-122.收稿日期:2019-12-180引言机械臂具有控制范围广及其操作灵活性高等优点,在工业各领域中得到广泛应用,并且机械臂系统在当下的发展需求材料更轻质、操作范围更广及运行精度更高[1]。

振动与冲击JOURNALOFVLBRATLONANDSHOCK第39卷第8期Vol.39Ns.82020带有移动末端执行器的柔性机械臂的动力学分析赵亮(上海建桥学院机电学院,上海201306)摘要:为了分析带有移动末端执行器的柔性机械臂的振动特性,将该系统建模成一个带有移动质量的在竖向平面内作伸缩和旋转运动的柔性悬臂梁。
为了方便研究,引入了两个坐标系:随悬臂梁旋转的局部坐标系和固定不动的整体坐标系;结构在局部坐标系下的物理量转化到整体坐标系中,并给出总动能和总势能,利用拉格朗日方程和假设模态法导出了结构的动力学方程;当机械臂以匀速旋转时,系统动力学方程为线性;当机械臂变速旋转时,系统动力学方程为非线性;通过数值算例分析了机械臂和移动末端执行器在不同运动状态下的动力响应;此外还讨论了移动末端执行器和机械臂间的摩擦力对机械臂振动特性的影响。
所得结论为相关机器人及其装备的设计提供了理论依据。
关键词:机械手臂;移动末端执行器;轴向运动;旋转运动;动力学分析中图分类号:TH212;TH213.3文献标志码:A D0【:10.13465/ki.jvs.2020.08.016Dynamie analysis of a flexible robotie arm carrying a moving end effectorZ"#0-1+g(CoSexe oS Mechanicvl and Electrical Engineering,Shanghai J A n Qiao University,Shanghai201306,China) Abstract:Robotic arm is wibely used in industual and space exploration.Dynamic analysis of a flexible robotic arm carrying a moving end effector was investipated.Tha system was modeled as a translating and rotating flexible cantilevar beam with a moving mass.Far tha convenienco purpose,two coordinata systems were introduced:a local coordinate system that rotates with tha cantilevar beam,and a fixed global coordinate system.Tha physical quantities of tha structure in tha local coordinata system were transformed into tha global coordinata system,and tha total kinetic energy and potential energy of tha structure were given.Then tha equations of tha structure were deived by tha Laaranga t equation with tha assumed moda method.When tha robotic arm rotates at a uniArm angular velocity tha system dynamic equation is linexr,whila it rotates at a vayabla angular velocity tha system dynamic equation is nonlinexr.Finily,tha dynamic responses of tha robotic arm and tha moving end Cectar undrr dAerent motion states were analyzed by numerical exampys.Moreovar,tha influencas of frictional force on vibration characteistics of tha robotic arm were alsy discussed. Tha obtained conclusions provide theoretical basis far tha design of robots and their equipments.Key WOrUf:robotic arm;moving end Cector;axially translating;rotating;dynamic analysis机械臂在工业生产及太空探索领域有着很广的应用&例如物料拾取或搬运机器人,空间站里协助科学工作者完成科学实验的空间机械手等。


机械臂动力学建模
机械臂动力学建模是计算机工程中一种方法,可以帮助计算机模拟机械臂的运动。
动力学建模可以让计算机分析机械臂结构中不同部分之间的关系,从而准确预测机械臂的运动行为。
机械臂动力学建模包括三个步骤:
(1)建立一个动力学模型。
首先,开发者需要确定机械臂的结构,及其内部元素之间的关系。
然后,他们需要根据这些关系,使用数学方法构建一个动力学模型。
例如,动力学模型可以包括刚度系数、质量、加速度及其他参数,这些参数可以用来描述机械臂的运动行为。
(2)求解模型。
在构建完动力学模型后,开发者需要解决模型,以得到机械臂在不同情况下的变化。
例如,他们可以研究机械臂在加载负载情况下的变形及运动行为,以及不同速度下的运动行为。
(3)仿真模型。
最后,开发者可以使用仿真软件对动力学模型进行仿真,以得到机械臂的精确运动行为。
仿真可以帮助开发者分析机械臂的结构缺陷以及力学行为,同时可以帮助他们探索机械臂的极限性能及性能参数。
动力学建模在机械臂技术的发展中发挥着重要作用。
它可以帮助计算机模拟机械臂,从而改善计算机控制的质量。
同时,动力学建模也可以帮助机械设计师们分析机械臂的结构缺陷,提高机械系统的性能及可靠性。
总的来说,机械臂动力学建模是一种非常实用的技术,可以帮助计算机模拟机械臂,从而改善机械系统的性能。
综上所述,机械臂动
力学建模非常重要,它可以极大地提高机械臂技术的发展水平和效率。

六自由度空间柔性机械臂的动力学分析与控制的开题报告
1. 研究背景
机器人技术的发展促进了工业自动化的进一步发展,柔性机械臂作为一种新型的机器人,具有机械臂与人类肢体相似的特性,同时具有高度的柔性和灵活性,在智能
制造、物流仓储等领域有着广泛的应用前景。
因此,针对六自由度空间柔性机械臂的
动力学分析与控制的研究具有现实意义和科学价值。
2. 研究内容
本文拟从以下几方面进行研究:
(1)六自由度空间柔性机械臂的运动学建模与分析:建立柔性机械臂的数学模型,分析其工作空间和机构运动;
(2) 六自由度空间柔性机械臂的动力学分析:综合考虑柔性结构,建立柔性机械
臂的动力学模型,分析在工作过程中的力学特性;
(3) 六自由度空间柔性机械臂的控制算法研究:针对柔性机械臂的特点,设计控
制算法,保证柔性机械臂的运动控制效果;
(4) 六自由度空间柔性机械臂的实验验证:设计柔性机械臂的实验平台,进行机
器人的实验验证和测试。
3. 研究意义
本文研究六自由度空间柔性机械臂的动力学分析与控制,对于完善机器人控制策略,提高机器人的动作精度和稳定性,推进柔性机器人的应用具有重要意义。
4. 研究方法
本研究主要采用理论模型的数学推导与仿真模拟的方法,依托于计算机模拟软件,系统分析六自由度空间柔性机械臂的动力学性能,研究机械臂在不同工况下的运动学
结构特性和控制策略,最终进行实验验证。
5. 预期成果
本文的预期成果为:建立六自由度空间柔性机械臂的动态数学模型,分析机械臂工作空间、运动学特性和动力学特性,设计柔性机器人的控制算法,验证柔性机械臂
在不同操作场景下的性能和稳定性。
柔性机械臂动力学建模与振动分析作者:邓云江来源:《中国新技术新产品》2014年第10期摘要:本文采用假设模态法和Lagrange方程建立了柔性机器人连杆的动力学模型,利用数值仿真,对比分析了截取模态的阶数对连杆振动的影响,结果表明,三阶模态截断可以得到较良好的振动响应分析结果。
仿真结果还表明,柔性机器人连杆的结构参数对系统振动的影响,适当增加连杆截面高度可以有效抑制其振动和弹性变形。
末端集中质量会对连杆振动产生较大影响。
仿真结果表明,集中质量越大,连杆振动也越剧烈。
关键词:柔性机器人连杆;动力学模型;模态截断;振动;弹性变形中图分类号:TP391 文献标志码:A柔性机器人具有操作速度快、能量消耗少、构件紧凑、载荷质量比大等优点。
但是,由于其连杆弹性变形,容易产生高频弹性振动,且其末端运动往往偏离较大。
近年来,柔性机器人连杆的弹性振动问题十分突出。
例如空间站航天器的柔性附件在展开过程中诱发的振动可使航天器的姿态失稳,为避免造成大的振动而使得展开过程达6-8小时。
柔性边杆在产生弹性振动时,能导致后续执行动作的精准度产生较大误差,从而使执行速度减慢,甚至使结构产生过早的疲劳破坏。
对柔性机器人连杆振动分析必须首先建立一个动力学模型。
在柔性多体系统动力学中,主要的建模方法有运动-弹性力学法、子结构(假设模态)法、浮动参考坐标方法、有限段法、有限元法、绝对节点坐标方程法等。
本文主要分析柔性机器人连杆的弹性振动问题,首先利用假设模态法和Lagrange方程建立单个柔性连杆的动力学方程,然后进行数值仿真,分析连杆机构参数以及末端集中质量等对其振动的影响。
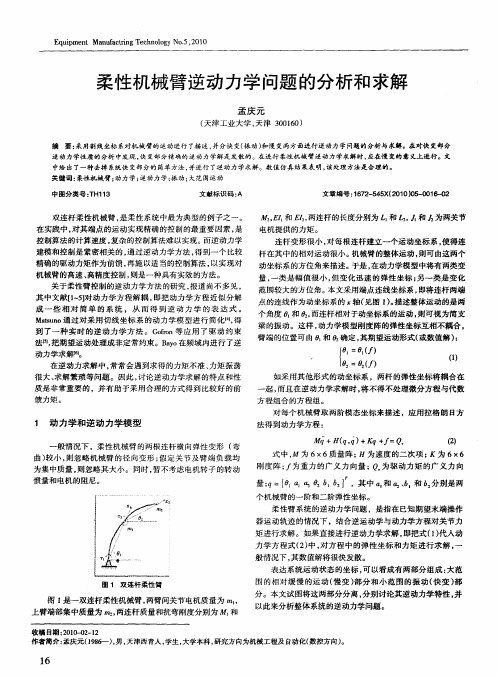
1柔性连杆动力学建模平面内做回转运动的柔性机器人连杆。
设 Oxy为固连在柔性机器人连杆上的参考坐标系;l为柔性机器人连杆(梁)的长度, h为截面高度;b为截面宽度;τ为电机的驱动力矩;θ为柔性机器人连杆的关节转角。
在对柔性机器人连杆(梁)进行动力学建模时,作Euler-Bernoulli柔性梁假设:( 1 )只考虑横向振动,忽略其轴向变形和剪切变形等;( 2 )横向振动为小变形;( 3 )柔性机器人连杆(梁)的长度远大于其截面尺寸。
机械手臂动力学建模与控制机械手臂是一种能够模拟人类手臂的机器装置,它可以在工业自动化、医疗卫生、仓储物流等领域发挥重要作用。
经过多年的研究和发展,机械手臂的精度和可靠性已经得到了显著提升,并且在工业生产中已广泛应用。
在机械手臂的研究中,动力学建模和控制是非常重要的环节。
动力学建模动力学建模是机械手臂研究的基础。
动力学建模涉及到机械结构、运动学、动力学和控制等多个方面,其中动力学是关键环节。
动力学建模主要是通过对机械臂力学特性的描述来实现。
在机械手臂运动学和动力学建模的研究中,关节的自由度数是非常重要的,它是机械手臂动力学特征的核心。
由于每个关节都有动力学参数,因此在动力学建模过程中,需要考虑每个关节的影响,以实现全局动力学特性的描述。
我们需要开发出适当的数学模型,以掌握机械臂动力学特性,为控制提供可靠的理论依据。
对于机械手臂的动力学建模,可以采用多种方法,例如拉格朗日法、牛顿-欧拉法、Kane方程法等。
每种方法都有各自的优点和适用范围。
选择哪种方法,需要根据研究需要和实际情况进行合理的选择。
控制方法机械手臂的运动控制是实现精确动作的关键,目前常用的控制方法主要有PID控制、模糊控制、神经网络控制等,其中PID控制是最为常用且有效的一种。
PID控制是一种基于误差反馈的闭环控制方法,它可以快速响应控制命令,同时具有良好的稳定性和抗干扰能力。
PID控制中的各项参数需要根据实际情况进行优化调整,以满足控制要求。
模糊控制是一种基于模糊逻辑的控制方法,它可以在不精确定义系统数学模型的情况下进行控制。
模糊控制通过对系统非线性特性的描述来实现全局控制,可应用于机械手臂等非线性系统的控制。
神经网络控制是一种采用神经网络模型进行控制的方法,通过对机械手臂进行大量训练,实现控制精度和鲁棒性的提升。
神经网络控制可以适用于各种非线性系统的控制,并且具有良好的鲁棒性。
在机械手臂的控制中,不同的控制方法可以采用组合的方式,以适应复杂控制环境的需要。
摘要本文从无人车上的机械臂使用带有一定柔性的工具这一实际控制问题抽象出一种半柔性机械臂系统。
以二连杆情形为例,为了解决连杆柔性问题,把连杆柔性建模成随机干扰,在一定的合理假设下建立带有柔性扰动的机械臂模型。
其中动力学部分采用了牛顿-欧拉迭代动力学算法,而运动学采用了一种新的思路,和一般的柔性机械臂不同。
然后,针对所建模型设计出一种类似双闭环的控制系统。
其中内环采用鲁棒自适应PD控制,实现关节角跟踪,由三部分组成:线性PD反馈项,补偿动力学的自适应控制项,补偿建模不确定性的鲁棒控制项;外环采用基于梯度下降法的开环学习控制算法,即根据上一次轨迹跟踪误差来调整下一次的期望关节轨迹,实现的目的是笛卡尔轨迹跟踪控制。
最后,在MATLAB中进行了实际系统的仿真,验证了算法具有一定的可行性,并提出改进方向。
关键词: 半柔性;机械臂;自适应;学习控制AbstractIn this paper,one kind of semi-flexible manipulator system is abstracted from the realistic control problem of the manipulator in automated vehicle using one to ol,which is flexible to some extent, to perform the task . For solving the link flexible problem , under some reasonable assumptions, a semi-flexible manipulator system is modeled with the link flexibility of the tool being stochastic disturbance. It’s a simple case ,where the manipulator has only t w o links . The Newton-Euler iterativ e algorithm is used in dynamic modeling process. However, the kinematics uses another new idea ,which is differen t from the conventional thinking of flexible manipulators. Then one control system lik e dual-closed-loop is designed for Cartesian space trajectory tracking. The inner loop ,whose ob jectiv e is realizing joi n t space trajectory tracking uses the robust adaptiv e PD controller,consisting of a linear PD feedback part, a nonlinear adaptiv e feedback part to compensate for the dynamics of robot and a robust control part to compensate for the stochastic disturbance. Th e outer loop ,whose objec tiv e is the same as the whole control system, uses open-looped learning controller based on the gradien t descen t method. That is to say ,according to the last time tra jec tory errors, the learning controller plans the next time desired join t space trajectory. The simulation is carried out in Matlab , which shows the control method is feasible to some extent. After that , some impro v emen t directions concerning the control system is proposed.Key words: Semi-flexible; Manipulator; Adaptive; Learning control第1 章绪论本章将要介绍此次毕业设计的选题内容、研究背景和意义、本文的安排,并简要说明作者所做的工作。
“空间柔性机械臂”资料合集目录一、空间柔性机械臂的动力学建模和分析二、空间柔性机械臂动力学建模、轨迹规划与振动抑制研究三、空间柔性机械臂动力学特性研究四、空间柔性机械臂在轨抓取动力学及振动特性分析五、空间柔性机械臂动力学建模分析及在轨抓捕控制六、基于压电致动器的空间柔性机械臂系统的轨迹跟踪与振动抑制一体化控制研究空间柔性机械臂的动力学建模和分析随着空间探索的不断深入,柔性机械臂在空间任务中的应用越来越广泛。
柔性机械臂具有灵活性强、适应性好等优点,在复杂的空间环境中表现出优越的性能。
为了更好地发挥柔性机械臂的优势,提高其控制精度和稳定性,需要对柔性机械臂的动力学建模进行分析。
本文旨在探讨空间柔性机械臂的动力学建模和分析方法,为实际应用提供理论支持。
柔性机械臂是一种具有弹性、阻尼等物理特性的机械系统。
在空间环境中,柔性机械臂需要承受各种复杂的外力,如重力、离心力、扰动力等,同时还需要适应空间环境的特殊性,如微重力、高真空、强辐射等。
因此,柔性机械臂的动力学建模需要考虑更多的影响因素,如弹性变形、流体动力学等,其分析方法也更加复杂。
柔性机械臂的动力学建模和分析方法主要包括数学建模和模拟分析。
数学建模是对柔性机械臂系统进行数学描述,建立相应的运动方程和动力学模型。
根据实际应用需求,可以采用不同的数学模型,如有限元法、集中质量法、Kane方法等。
模拟分析是通过计算机仿真技术,对数学模型进行数值求解和分析,以获得柔性机械臂的动力学行为。
例如,可以采用数值积分方法求解运动方程,得到柔性机械臂的位移、速度和加速度等动态性能。
通过数学建模和模拟分析,可以得到柔性机械臂的动力学行为。
以下是部分结果展示:图1:柔性机械臂的位移响应曲线(在不同外力作用下的位移变化)图2:柔性机械臂的速度响应曲线(在不同外力作用下的速度变化)图3:柔性机械臂的加速度响应曲线(在不同外力作用下的加速度变化)通过对柔性机械臂的动力学建模和分析,我们可以得到其位移、速度和加速度等动态性能。
柔性机械臂动力学建模
一,研究现状
柔体动力学建模方面国内外出现很多研究,主要针对关节柔性和柔性臂杆进
行建模。
其中,Chang-Jin Li, T.S. Sankar, 利用拉格朗日方程及假设模态法对柔性
机械臂进行建模,提出的该方法可以降低运算量,并用单连杆柔性机器人进行证
明验证;
B.Subudhi ,A.S.Morris, 基于欧拉-拉格朗日法和假设模态法对多柔性杆和
柔性关节进行动力学建模;
Gnmarra-Rosado VO,Yuhara, EAO,利用牛顿-欧拉公式和有限元分析法对两柔
性两转动关节推导动力学方程;
危清清,采用拉格朗日及假设模态法建立柔性机械臂辅助空间站舱段对接过程的
动力学方程;
谢立敏,基于动量、动量矩守恒关系和拉格朗日假设模态法对双柔性关节单柔性
臂建模;王海,在考虑外部干扰下对柔性关机机械臂进行动力学建模;刘志全,
基于精细模型的空间机械臂对柔性关节进行建模。
1, 建模过程原理
1)坐标系的选择(根据机械臂运动姿态选择不同的坐标系,一般包括绝对坐标
系和相对坐标系,如表1所示)
表1坐标系
坐标系 建系方法 特点
绝对坐标系 相对于惯性坐标系的单元结点坐标表达 推出变形体的应变-位移关系 计算过程需要进
行迭代求解,效率
低
相对坐标系 在柔性机械臂上直接建立一个浮动坐标系 运动合成分解得出相对运动和牵连运动 有利于小变形结
构的离散化
2),柔体离散化方法
设柔性体的变形始终处于弹性范围内,因为任何一个弹性体都具有无限多自
由度,忽略轴向变形和剪切变形的影响,仅考虑弯曲变形,通常都将柔性体离散
成有限自由度作为近似分析模型。(对变形场进行离散化后得到的常微分方程将
有利于对柔性多体系统动力学建模研究的进一步深入)如下表2所列。
表2 变形体离散化方法
离散化方法 原理 优点 缺点
经典的瑞利-里兹(Reyliegh-Rite)法 构造假设位移场,生成里兹基函数矩阵 弹性连续体力学近似解的最基本方法 对于复杂形状,边
界,载荷等建模困
难
有限元法 将物体分割成许多形状规则的简单单元,各单元间适合于复杂形状边界载荷情况下的物体离散和分精确度要求高时,
需要保留的自由
度数很多
通过节点连接起来。(将无限自由度理想化为有限自由度) 析。 (线性变形)
有限段法 把细长杆分为有限刚段,(把柔性系统描述为多刚体,以弹簧阻尼器结点相联) 适于细长杆系统 (描述的多体系统是时变的) (只满足小应变
假设)
(非线性变形)
模态综合法(假设模态法) 采用模态向量及相应的模态坐标来描述物体在空间随时间变化的位移(变形) 模态阶数可以选择,模态综合可以研究大型复杂系统的振动
集中质量法 用若干离散结点上的集中质量代替原来系统的分布质量(全部质量都集中到各个节点上) 适于部件外形复杂的柔性体系统 自由度相同的情
况下,模型精度低
于有限元法
3)动力学的建模方法
根据原理的不同一般常用的可分为牛顿-欧拉方法,拉格朗日方程(第二类),以
及凯恩方程。如表3所示。
表3 动力学建模方法
建模方法 原理 优点 缺点
牛顿-欧拉 应用质心动量矩定理推导出隔离体的动力学方程 动力学分析的主要手段 方程数量多,计算
效率低
拉格朗日 (哈密顿原理) 从能量角度出发建立起来的系统的动能,势能和功之间的标量关系。 不包含未知的约束反力,适用于比较简单的柔性体动力学方程。 复杂结构,拉格朗
日微分运算将变
得非常繁琐。
凯恩方程 引入偏速度,偏角速度,使用广义速率代替广义坐标作为系统的独立变量 消除不做功的约束力,不引入能量函数,没有微分运算,适于多体大系统
二,单杆柔性机械的建模过程
1,模型简化假设
关节建模时需要注意关节齿轮传动间隙,间隙的存在使得传动机构存在误差,
输出运动与输入运动不再是线性关系;另外,关节臂驱动力是通过电机来提供,
电机中的电感电阻等元件,会影响电机力矩的产生,即关机建模的精细化问题,
这里只进行简单的处理,不考虑精细化问题。柔性关节主要由分体式永磁同步电
机,谐波减速器,永磁制动器,光电编码器和圆光栅等组成。谐波减速器为柔性
关节的减速和驱动装置,一般把把关节视为转子-扭簧系统。
柔性臂杆的模型假设
一般将柔性杆简化为简支梁,如何选择梁的模型,取决于剪切和旋转对梁的
横向变形的影响。Timoshenko梁同时考虑了梁的剪切变形以及截面绕中性轴转
动惯量的影响,较适合于机械臂粗短的情况,实际上接近刚性臂。
Euler-Bernoulli梁则忽略梁的剪切变形以及截面绕中性轴转动惯量的影响,适
于细长臂且横截面可以变化的情况。