DSP中电机弱磁控制解析
- 格式:ppt
- 大小:2.66 MB
- 文档页数:59
步进电机控制方案 DSP简介步进电机是一种常用的电动机类型,适用于需要精确定位和高扭矩输出的应用场景。
与其他电机类型相比,步进电机具有较高的位置控制精度和较低的成本。
本文旨在介绍一种基于DSP(Digital Signal Processor,数字信号处理器)的步进电机控制方案,以实现精确的步进电机控制。
DSP介绍DSP是一种专门用于数字信号处理的芯片或系统。
其优势在于能够高效地进行信号处理、算法运算和数据处理。
DSP芯片通常带有多个高性能的计算核心和丰富的外设接口,适用于各种实时应用。
在步进电机控制方案中,使用DSP作为控制器可以实现高精度的位置控制和快速响应。
步进电机控制原理步进电机是一种需要以离散的步进角度进行控制的电机。
其控制原理基于电机内部的定子和转子之间的磁场交互作用。
步进电机的转子通过电流驱动产生磁场,定子通过相序切换实现转子的转动。
控制步进电机的关键是准确控制相序的切换和电流的驱动。
基于DSP的步进电机控制方案可以通过以下步骤实现:1.位置规划:根据实际需求,确定步进电机需要旋转到的位置。
这可以通过输入命令、传感器反馈或计算算法等方式得到。
2.相序切换:根据位置规划,确定相序的切换顺序。
相序切换是通过控制电机驱动器中的逻辑电平来实现的。
DSP通过输出控制信号控制驱动器的相序切换,从而实现电机的转动。
3.电流驱动:根据步进电机的特性和要求,确定合适的电流驱动参数。
通过DSP输出的PWM(Pulse Width Modulation,脉宽调制)信号和驱动电路,实现对电机相线施加准确的电流驱动。
4.反馈控制:根据应用需求,添加合适的反馈控制机制来实现闭环控制。
常见的反馈控制方式包括位置反馈、速度反馈和力矩反馈等。
DSP步进电机控制方案的优势相比传统的微控制器或PLC(Programmable Logic Controller,可编程逻辑控制器)控制方案,基于DSP的步进电机控制方案具有以下优势:•高性能:DSP芯片具有强大的计算能力和实时性能,可以实现复杂的控制算法和快速响应。
DSP的异步电动机控制系统具体介绍1 异步电机控制的数学模型鼠笼式异步电机在d,q两相同步旋转坐标系下的数学模型的电压方程为:其中:usd和usq分别为d,q旋转坐标系下的定子电压;isd和isq分别为d,q旋转坐标系下的定子电流;ird和irq分别为d,q旋转坐标系下的转子电流;Rs和Ls分别为定子绕组的电阻与自感;Rr和Lr分别为定子绕组的电阻与自感;Lm为定转子互感;P为微分算子;ω1为同步旋转角频率;ωs为转差角频率;将转子磁链矢量定在d轴方向上,可以推导出转子磁链为:其中:Tr为转子时间常数。
由式(2)可见,调节定子电流的isd分量可以调节转子磁链ψr,而当保持该定子电流磁通分量不变时,转子磁通保持不变。
其转矩方程为:其中:Te为电磁转矩;np为电机的极对数;由式(3)可见,控制定子电流isq分量可以控制电机的电磁转矩Te,通过该转矩分量可以调节电机的转速。
该控制系统采用双闭环结构,图1所示是其控制系统结构原理图。
该控制系统所检测的两相定子电流经Clarke与Park变换后可产生转矩电流分量和励磁电流分量,然后结合检测转速并通过电流模型计算坐标变换所需的磁链角。
检测转速与给定转速误差经PI调节后将生成转矩给定值。
转矩电流分量与励磁电流分量的误差经PI调节可产生u小M。
给定值,并在通过旋转坐标变换后输入SVPWM模块以产生6路PWM波,从而控制逆变器。
2 SVPWM原理电压空间矢量PWM技术是SPWM技术与电机磁链圆形轨迹直接结合的一种方法。
它从电动机角度出发,直接以电动机磁链圆形轨迹控制为目的,该方法不仅在控制上与SPWM的效果相同,而且更直观,物理意义更明晰,实现起来也很方便。
SVPWM调制方法是利用交替使用不同的电压空间矢量(六个基本电压矢量和两个零矢量)合成实现的。
参考矢量合成规则是:由当前参考矢量所在扇区的两个电压矢量分别作用一定时间合成所得。
为了补偿参考矢量的旋转频率,设计时需要插入零矢量。
2008 Microchip Technology Inc.DS01206A_CN 第1页AN1206简介从消费应用到汽车应用领域,不同功率和体积的交流感应电机(AC induction motor,ACIM )都获得了广泛的应用。
在众多可能的应用中,一些应用场合需要具备高速运行能力,而只需在低速时输出高转矩。
属于消费应用的洗衣机和电力机车中的牵引应用是具有这一需求的两种应用场合。
这些要求促使了一种被认为是―弱磁‖的感应电机控制技术的产生。
本应用笔记介绍了如何使用dsPIC ®数字信号控制器(Digital Signal Controller,DSC )对交流感应电机实现具有弱磁控制功能的无传感器磁场定向控制(FOC ),从而实现扩展转速范围的高性能控制。
本应用笔记是AN1162(交流感应电机(ACIM )的无传感器磁场定向控制(FOC ),该应用笔记也包含了弱磁控制模块的设计细节)的扩展。
本应用笔记在给出一些概念之前假定读者已阅读AN1162并熟悉其中的相关内容。
控制策略无传感器磁场定向控制应用于ACIM 的磁场定向控制原理是以实现励磁电流分量和转矩电流分量之间的解耦为基础。
这种解耦使感应电机控制能像直流电机控制一样简单。
磁场定向控制技术意味着需要实现从静止定子坐标系到旋转的转子坐标系之间的变换。
这种变换使得定子电流分量之间的解耦成为可能,即可实现励磁电流分量和转矩电流分量之间的解耦。
这种解耦策略是基于转子旋转坐标系下的感应电机数学方程。
在将静止定子坐标系变换到转子旋转坐标系时,需要确定转子磁通的位置。
转子位置可通过直接测量或使用其他可测参数(如相电流和相电压来估计。
术语―无传感器‖控制表示省却了转速测量传感器。
图1给出了磁场定向控制的控制框图,并对各组成部分进行了介绍。
特别需要指出,弱磁模块需要使用电机机械转速作为输入,其输出将产生与励磁电流分量相对应的d 轴电流。
有关交流感应电机磁场定向控制方面的其他信息,可参阅AN1162(参见―参考文献‖)。
新能源汽车新型电机的设计及弱磁控制新能源汽车的发展是当前汽车行业的热点之一,而电机作为新能源汽车的核心部件之一,其设计及弱磁控制技术的研究与应用也备受关注。
本文将从新能源汽车电机的设计以及弱磁控制两个方面进行探讨。
一、新能源汽车电机的设计新能源汽车电机的设计是保证其高效、稳定、可靠运行的关键。
首先,电机的功率和转速需与车辆的需求相匹配,以确保车辆性能的高效和稳定。
其次,电机的结构和材料选择应考虑到轻量化和散热性能,以提高车辆的续航里程和承载能力。
此外,电机的控制系统也需要具备高效率、快速响应和精准控制的特点,以满足不同驾驶场景下的需求。
针对以上需求,新能源汽车电机的设计通常采用无刷直流电机(BLDC)或永磁同步电机(PMSM)。
这两种电机具有高效率、高功率密度、高扭矩、低噪音和可靠性好等优点,逐渐成为新能源汽车的首选电机类型。
同时,设计者还需要考虑电机的永磁体材料、绕组结构、冷却系统等方面的优化,以提高电机的性能和可靠性。
二、新能源汽车电机的弱磁控制弱磁控制技术是新能源汽车电机控制领域的重要研究方向之一。
传统的电机控制方法通常采用定磁转矩控制或恒磁转矩控制,但这些方法在低转速和低负载情况下容易产生振动和噪音,同时也会降低电机的效率。
而弱磁控制技术可以有效解决这些问题。
弱磁控制技术通过改变定子电流的相位和振荡频率,实现对电机转矩和速度的精确控制。
其核心思想是在低转速和低负载情况下,通过减小定子电流的幅值,使电机工作在弱磁状态下,从而降低振动和噪音,提高电机的效率。
同时,弱磁控制技术还可以实现对电机转矩的精确控制,使车辆在起步、行驶和制动等不同工况下具备更好的驾驶性能和舒适性。
弱磁控制技术的实现主要依赖于先进的电机控制算法和控制器的设计。
目前,常用的控制算法包括PID控制、模糊控制和神经网络控制等。
这些算法可以根据电机的输出信号和目标转矩进行自适应调节,以实现对电机转矩和速度的精确控制。
同时,控制器的设计也需要考虑到实时性、可靠性和抗干扰性等因素,以确保电机控制系统的稳定性和可靠性。
直流电机弱磁控制的相关问题现有一直流电机额定转速为970rpm,工艺要求转速可调范围为780-1500rpm;电机需弱磁运行。
现有几个问题需要弄清楚。
1、系统用模拟量输入来给定转速信号(CUD1端子4、5,信号为0-10V),但当模拟输入为10V时,应该是对应额定转速970rpm还是1500rpm,具体应该怎样设置,请详细说明一下。
2、弱磁运行是不是还要用一个开关量来实现控制,当开关量为"0"时,0-10V给定范围内电机转速为0-970rpm;开关量信号为"1"时,0-10V 给定范围内电机转速为0-1500rpm.如果不需要,请告知用什么样的方法能够实现,应该怎样连接。
答:1、这个对应关系是很灵活的,参数设置是由转速反馈环节来定标决定。
举个例子来说:你的转速反馈如果是编码器信号反馈的话,且考虑一定的最大转速裕量,则我们将100%(10V)的转速值定标为1600rpm,则只需设置参数P143=1600即可。
当你希望电机运行于780rpm时,则只需给出转速给定信号(CUD1端子4、5,信号为4.875V)即可;当你希望电机运行于1500rpm时,则只需给出转速给定信号(CUD1端子4、5,信号为9.375V)即可。
2、弱磁运行不需要用一个开关量来实现控制,你只需按照正常情况给定转速值即可。
弱磁运行是由6RA70装置内部来自动判断、完成的。
6RA70装置自己本身来判断何时该进入弱磁状态,你只需给出你期望的转速给定值即可。
例如:某一时刻时,电机正运行于780rpm,此时你想让电机再工作于1500rpm,则只需给出转速给定信号(CUD1端子4、5,信号为9.375V),6RA70装置会在收到给定值信号后,自动进入弱磁运行状态,将电机转速升高到1500rpm。
这个过程是不需要你来人工介入的。
电机的DSP控制技术及其应用摘要:电机在各种电气传动和位置伺服系统中占有极其重要的位置,可以实现速度控制和位置控制。
随着高性能电机控制系统也在不断地更新,尤其是将DSP技术运用到电机控制之后,硬件的统一性与软件的灵活性可以有机结合,电机的全数字化及集成化控制成了电机控制的发展方向。
本文分析了电机DSP控制技术应用的必要性和可行性,并对电机的DSP控制系统进行了总体设计研究。
关键词:DSP;控制技术;可靠性1设计电机DSP控制系统的必要性及可行性电机控制系统中,通常存在模拟信号和数字信号,既有连续信号,也有离散信号,多种信号的处理比较复杂。
同时在一些控制系统中,执行机构或是驱动电机并不是只有一种电机,如果单独设计控制器,就需要更多的元器件,从而整个系统变的复杂,可靠性降低。
单独设计的控制器也可以满足系统的要求,但是这样会使影响系统性能的来源增加,对系统的安装、测试等就造成了诸多不便。
同样在一些更加复杂的系统中,如果使用的电机种类更多,则对电机控制的要求也越高。
为此,有必要设计电机控制系统平台,可以同时实现对多个或多种电机进行控制,从而使控制系统更简单、可靠。
传统的数字控制系统通常以单片机或微机为核心,而以DSP为核心的电机控制系统则具有更高的精度和速度、具有逻辑控制功能和各种中断处理等更强大的处理及计算能力。
随着大规模和超大规模集成电路技术的发展,DSP芯片的功能将会越来越强。
在DSP应用到电机控制中后,全数字控制系统成了当前电机控制的发展方向。
同时以DSP为核心的控制系统的以下特点也使设计电机的DSP控制系统更加可行了。
(1)DSP采用哈佛结构或改进的哈佛结构,使数据和程序相互独立的总线结构提高了计算能力。
因此可以实现比较复杂的控制规律,如优化控制、智能控制等现代控制理论和算法的应用。
(2)可简化电机控制器的硬件设计,重量低,体积小,能耗低。
(3)DSP芯片内部设计保证元器件的稳定性和可靠性,从而会使整个系统的可靠性提高。
谈谈新能源电机扭矩控制—弱磁场控制(1)本讲开始,笔者将分4次对电机扭矩控制中的弱磁场控制进行详细介绍!对于新能源电机扭矩控制,除了电流控制、电流谐波重叠控制、振动隔离处理控制外,至少还包括:弱磁场控制、扭矩推测控制、相电流平均电流推测、振动抑制控制、电机转速FB控制、扭矩指令值计算、dq 轴变换控制、车轮转速控制等。
今天,笔者将继续对电机扭矩控制的其他模块进行详细介绍,接着振动隔离处理控制谈谈电机扭矩控制中的弱磁场控制技术。
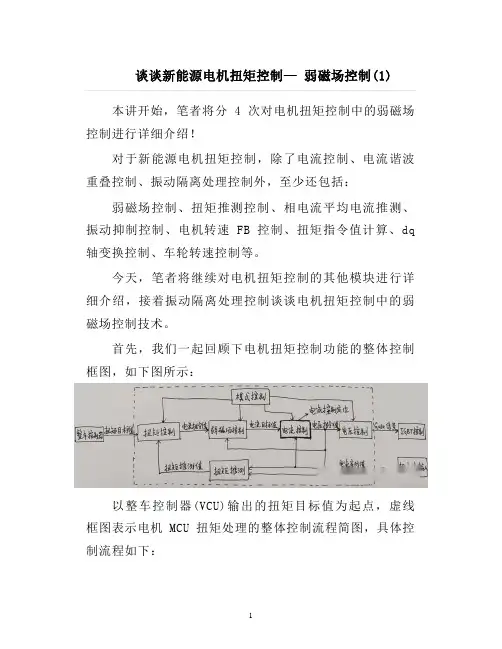
首先,我们一起回顾下电机扭矩控制功能的整体控制框图,如下图所示:以整车控制器(VCU)输出的扭矩目标值为起点,虚线框图表示电机MCU扭矩处理的整体控制流程简图,具体控制流程如下:当电机MCU获取VCU的扭矩目标指令值后,扭矩控制模块会根据扭矩推测值输出电流指令值给弱磁场控制模块,弱磁场控制模块会综合考虑效率和能耗将电流目标值输出给电流控制模块,然后电流控制模块会结合电流目标值以及电流实际值,将电压指令值输出给电压控制模块,最后,电压控制模块会将Gate信息给到IGBT模块,由IGBT控制模块对通道进行打开和关闭控制。
此外,电机MCU内置模式控制方式,根据车辆不同的工况和负荷,分别对扭矩控制模块、弱磁场控制模块、电流控制模块以及电压控制模块的控制参数进行调整;同时,扭矩推测模块根据电流实际值以及电压指令值,通过内部算法将扭矩推测值输出给扭矩控制模块,对电流指令值的正确发出起到一个非常核心的参考作用。
因此,对于电机扭矩控制,由上图可以看出:基于电流指令值调整电流目标值,使电压指令值不脱离期望的电压值,其中扮演重要角色的就是“电机的弱磁场控制”。
对于以上弱磁场控制的核心目标,就是通过调整电流目标值,使电源电压上可施加的电压不超过目标值来实现的!同样的,在提出需求前,我们先来看看弱磁场领域的控制方法,如下图所示:在弱磁场领域内,电压限制椭圆和扭矩曲线的交点为可能输出效率最高的扭矩点。
[直流电机控制DSP实验报告范文]dsp永磁电机控制DSP实验报告开课实验室:2022年03月21日学院物电年级、专业、班姓名成绩课程名称DSP实验实验工程名称直流电机控制指导老师签名实验目的1.学习用C语言编制中断程序,控制VC5509DSP的通用I/O管脚产生不同占空比的PWM信号。
2.学习VC5509DSP的通用I/O管脚的控制方法。
3.学习直流电机的控制原理和控制方法。
二.实验设备计算机,ICETEK-VC5509-EDU实验箱〔或ICETEK仿真器+ICETEK-VC5509-A系统板+相关连线及电源〕。
三.实验原理1.TMS320VC5509DSP的McBSP引脚:通过设置McBSP的工作方式和状态,可以实现将它们当成通用I/O引脚使用。
2.直流电机控制:直流电动机是最早出现的电动机,也是最早能实现调速的电动机。
近年来,直流电动机的结构和控制方式都发生了很大的变化。
随着计算机进入控制领域,以及新型的电力电子功率元器件的不断出现,使采用全控型的开关功率元件进行脉宽调制(PulWidthModulation,简称PWM)控制方式已成为绝对主流。
直流电动机的转速控制方法可分为两类:对励磁磁通进行控制的励磁控制法和对电枢电压进行控制的电枢控制法。
其中励磁控制法在低速时受磁极饱和的限制,在高速时受换向火花和换向器结构强度的限制,并且励磁线圈电感较大,动态响应较差,所以这种控制方法用得很少。
现在,大多数应用场合都使用电枢控制法。
绝大多数直流电机采用开关驱动方式。
开关驱动方式是使半导体功率器件工作在开关状态,通过脉宽调制PWM来控制电动机电枢电压,实现调速。
上图是利用开关管对直流电动机进行PWM调速控制的原理图和输入输出电压波形。
图中,当开关管MOSFET的栅极输入高电平时,开关管导通,直流电动机电枢绕组两端有电压U。
t1秒后,栅极输入变为低电平,开关管截止,电动机电枢两端电压为0。
t2秒后,栅极输入重新变为高电平,开关管的动作重复前面的过程。
永磁同步电机弱磁控制方法综述永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种高效、高功率密度、高控制精度的电机,逐渐成为工业应用中的主流。
然而,受到磁场偏移等因素的影响,PMSM可能会出现弱磁现象,导致性能下降。
因此,研究弱磁控制方法成为提高PMSM性能的重要方向。
本文将对目前研究中常见的几种弱磁控制方法进行综述。
首先,基于模型的弱磁控制方法是实现PMSM弱磁控制的一种常见手段。
这类方法通常通过建立PMSM的数学模型,并通过控制器对电流、转矩等进行调节,实现对电机的控制。
例如,采用自抗扰控制器(Active Disturbance Rejection Control,ADRC)的弱磁控制方法通过对磁场偏移的估计,实时调整电流控制器,从而实现对PMSM的控制;基于滑模变结构控制的弱磁控制方法通过引入滑模面和控制函数,实现对电机转矩的精确控制。
其次,基于感应电磁势观测的弱磁控制方法是另一种常见的弱磁控制手段。
该方法通过感应电磁势的观测实现对磁场偏移的补偿控制。
例如,采用扩展状态观测器(Extended State Observer,ESO)的弱磁控制方法,通过对感应电磁势的估计,实时进行磁场偏移的补偿。
此外,还有一些基于逆运动学的弱磁控制方法。
这类方法通过逆运动学模型的建立,实现对弱磁状况下电机的控制。
例如,基于逆运动学模型的弱磁控制方法通过对电机位置和速度的估计,快速响应磁场偏移,实现对电机转矩的控制;采用模型参考自适应控制器(Model Reference Adaptive Control,MRAC)的弱磁控制方法通过对逆运动学模型参数的自适应学习,实现对电机的精确控制。
最后,基于自适应神经网络的弱磁控制方法是近年来的研究热点之一、这类方法通过神经网络对电机的非线性特性进行建模,实现对电机转矩、电流等的控制。
例如,采用放大单层神经网络(Adaptive Radial Basis Function Neural Network,ARBNN)的弱磁控制方法,通过对电机非线性特性的建模和学习,实现对电机转矩的控制。