感应电动机转子磁场定向下的弱磁控制算法
- 格式:pdf
- 大小:811.32 KB
- 文档页数:7
感应电动机转子磁场定向下的弱磁控制算法1概述电感应电动机转子磁场定向控制是一种利用电感应电动机转子磁场定向来实现自动控制的新型技术,它利用了转子运行时产生的偏磁场,通过反馈控制实现了广泛的自动化控制。
此外,磁场定向技术还具有优于传统数字控制方法的实时性和灵活性,适用于智能控制场景。
基于以上优点,近年来,磁场定向控制算法在微机控制行业中受到越来越广泛的关注,并得到广泛的实际应用。
2基本原理电感应电动机转子磁场定向控制技术是一种可以满足电动机自动保持特定磁场定向的自动控制算法,该算法用来检测当前转子运行状态并调整相应偏磁,从而控制转子磁场,使其保持设定的参考方向。
由于磁场定向技术的特殊性,其实现的过程是一种弱磁控制。
首先,对电动机实现弱磁控制,需从转子中使用高精度磁强计和电场模拟器以及磁鉴定系统来成功探测当前转子的磁场强度。
在控制环节,运用转子偏磁信号调整电机电磁联轴器,从而达到现有系统中偏磁矫正和转子磁场定向控制的目标。
3算法实现磁场定向控制算法的实现主要包括检测转子磁场定向状态、调整转子磁场定向和转子偏磁的三个步骤。
(1)通过相应传感器检测转子磁场定向状态:首先,通过高精度磁强计、电场模拟器和磁鉴定系统,检测转子当前位置及其在设定参考方向上的偏差角度。
(2)调整转子磁场定向:根据检测出来的转子磁场定向状态及其偏差角度,柔性调整相应偏磁,来实现转子磁场定向调整。
(3)调整转子偏磁:根据磁场定向算法的反馈信号和当前转子磁场定向状态,调整相应的转子偏磁,从而达到磁场定向控制的目的。
4结论电感应电动机转子磁场定向控制算法是一种有效的控制方法,它可以实现高精度的转子磁场定向控制,进而提高电动机的性能和可靠性。
该技术为智能化系统提供了有效、稳定、可靠的控制平台,同时也开拓了电动机转子磁控自由度更高的自控控制空间。
基于矢量控制的感应电机弱磁控制算法研究陶华堂;李强【摘要】变频调速控制系统要求电机具有宽范围的恒功率弱磁调速能力,并能输出较大的转矩.提出一种感应电动机弱磁状态下励磁电流和转矩电流轨迹控制的新方法.在满足电机和驱动器最大电压和电流约束条件的前提下,对电机励磁电流轨迹和转矩电流轨迹分别独立控制,实现全速度范围内的最大转矩输出.设计了该弱磁控制算法的实现策略,并在7.5 kW感应电机上进行实验研究,与传统弱磁控制方法相比,提出的弱磁控制方法可以输出更大的转矩,电流波动小,系统更稳定.【期刊名称】《电气传动》【年(卷),期】2016(046)003【总页数】5页(P7-11)【关键词】感应电机;矢量控制;弱磁;最大转矩电流比控制【作者】陶华堂;李强【作者单位】中国卫星海上测控部,江苏江阴214400;中国卫星海上测控部,江苏江阴214400【正文语种】中文【中图分类】TM30感应电机具有转子结构坚固、可靠性高、成本低、转矩波动小和噪声小等优点。
基于矢量控制的感应电机变频调速系统被广泛应用于家用电器、电梯曳引、电动汽车、数控机床、船舶动力等领域。
采用电压源逆变器驱动电机时,由于受到逆变器最大输出电压和最大输出电流的限制,需要采用弱磁调速等方法使电机输出最大转速,且高速时仍能最大限度输出电磁转矩。
传统的弱磁控制方法是在基速以上,控制电机磁链和电机转速成反比[1-2],这种方法简单易实现,但是没有输出最大转矩电流比,即没有最大限度输出转矩;文献[3]提出了一种过调制算法,用来实现永磁同步电机的弱磁调速,但是该方法实现起来较困难;文献[4-11]提出的查表修正方法目前较为流行,主要是根据电机的转速通过查表修正电机励磁电流iM和转矩电流iT,此类方法简单易实现,应用也较为广泛,但是受电机本身参数影响较大;文献[12]提出了一种通过控制电机电压轨迹的方法实现电机弱磁调速控制,该方法不受电机参数影响,但前提是要获得电机励磁电流的大小。
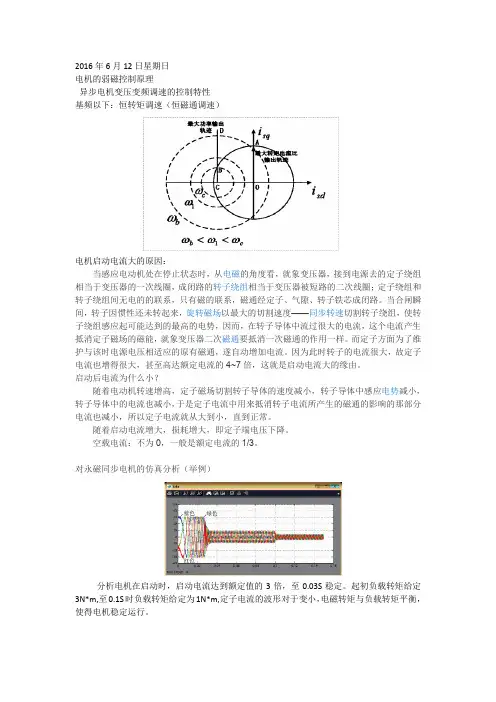
2016年6月12日星期日电机的弱磁控制原理异步电机变压变频调速的控制特性基频以下:恒转矩调速(恒磁通调速)电机启动电流大的原因:当感应电动机处在停止状态时,从电磁的角度看,就象变压器,接到电源去的定子绕组相当于变压器的一次线圈,成闭路的转子绕组相当于变压器被短路的二次线圈;定子绕组和转子绕组间无电的的联系,只有磁的联系,磁通经定子、气隙、转子铁芯成闭路。
当合闸瞬间,转子因惯性还未转起来,旋转磁场以最大的切割速度——同步转速切割转子绕组,使转子绕组感应起可能达到的最高的电势,因而,在转子导体中流过很大的电流,这个电流产生抵消定子磁场的磁能,就象变压器二次磁通要抵消一次磁通的作用一样。
而定子方面为了维护与该时电源电压相适应的原有磁通,遂自动增加电流。
因为此时转子的电流很大,故定子电流也增得很大,甚至高达额定电流的4~7倍,这就是启动电流大的缘由。
启动后电流为什么小?随着电动机转速增高,定子磁场切割转子导体的速度减小,转子导体中感应电势减小,转子导体中的电流也减小,于是定子电流中用来抵消转子电流所产生的磁通的影响的那部分电流也减小,所以定子电流就从大到小,直到正常。
随着启动电流增大,损耗增大,即定子端电压下降。
空载电流:不为0,一般是额定电流的1/3。
对永磁同步电机的仿真分析(举例)分析电机在启动时,启动电流达到额定值的3倍,至0.03S稳定。
起初负载转矩给定3N*m,至0.1S时负载转矩给定为1N*m,定子电流的波形对于变小,电磁转矩与负载转矩平衡,使得电机稳定运行。
转速刚启动瞬间为0,但大约经过0.02S后电机转速达到给定值,当0.1S时负载突然减小,转速有短暂的上升,立刻回到给定值,转速比较稳定,达到理想。
电机启动时,电磁转矩启动时较大,至0.03S后电磁转矩达到3N*m,0.1S时负载转矩发生变化,即电磁转矩也相应的发生变化。
电机空载运行时,空载电流的幅值大约是额定值的1/3,绝对不为0,平均值为0,相应的三相静止定子电流为120度,两相静止坐标互差90度,空载情况下,0.2S之前空载,其输出的两相静止坐标近似为0 ,但肯定不是0,由于采用id=0控制,即直轴电流一直是0,而转矩电流iq在控制是电流几乎为0,加负载后,值增加。
弱磁控制解决方案一d、q轴数学模型d-q轴系下表贴式同步电机电子方程为:式中: 和分别为直轴和交轴同步电感,为定子相电阻,为转子的电角速度,为转子永磁体产生的励磁磁场的基波磁链。
电机高速稳定运行时,忽略定子压降,电压方程可以改写为,。
电动机定子电压大小为√,将上述等式带入得到√。
根据定子绕组电压公式,当电机定子电压达到逆变器输出的极限电压时,为了使得转速升高,只能通过增加去磁电流分量和减小交轴电流分量,以维持电压平衡,达到弱磁调速目的。
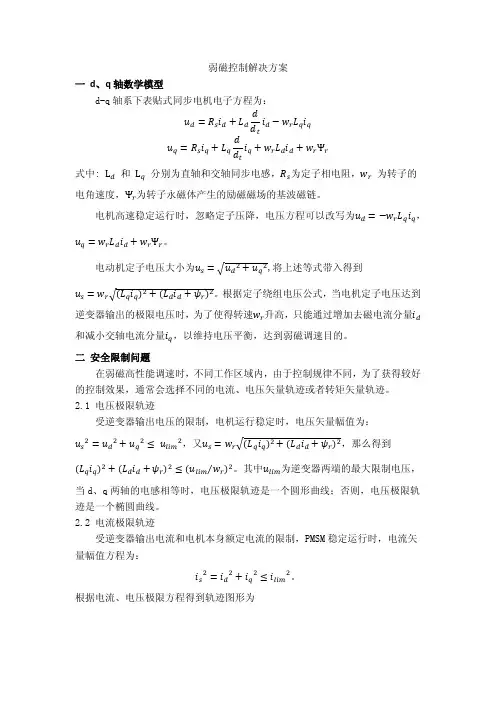
二安全限制问题在弱磁高性能调速时,不同工作区域内,由于控制规律不同,为了获得较好的控制效果,通常会选择不同的电流、电压矢量轨迹或者转矩矢量轨迹。
2.1 电压极限轨迹受逆变器输出电压的限制,电机运行稳定时,电压矢量幅值为:,又√,那么得到⁄。
其中为逆变器两端的最大限制电压,当d、q两轴的电感相等时,电压极限轨迹是一个圆形曲线;否则,电压极限轨迹是一个椭圆曲线。
2.2 电流极限轨迹受逆变器输出电流和电机本身额定电流的限制,PMSM稳定运行时,电流矢量幅值方程为:。
根据电流、电压极限方程得到轨迹图形为电动机稳定运行时,定子电流矢量既不能超过电压极限圆也不能超过电流极限圆。
如果1时,电流矢量的范围限制在ABCDEF中。
三弱磁控制3.1 弱磁控制方案一*主要控制流程:电机控制进入弱磁控制模式后,保持电流矢量大小不变,通过调节超前角β大小,调节d、q两轴电流、,通过反馈调节确定电压极限圆限制。
通过反馈结果确定超前角β变化趋势。
弱磁控制主要面临的问题1 进入弱磁控制状态,退出弱磁控制状态。
通常进入弱磁控制状态是电压或电流的调节达到了逆变器的饱和度。
以id=0的控制模式为例,调节q轴电流,确保定子两端电压值不超过Vmax。
当q轴电流达到设定的值,如果需要继续增加电机转速只能通过弱磁调节(保持电机硬件参数不变)。
首先保证电子两端电流大小i s不变,通过调节d、q两轴电流实现调节。
2 调节d、q两轴电流值调节d、q两轴电流过程中应该保证有效电流大小i s恒定,满足关系式为i s√i d i q。
98 位置传感器脉冲格中 A 脉冲国电机工程学报 U相第 31 卷格 V相 B 脉冲格格传统控制方法图 10 Fig.10 电机满载、额定转速下的相电流波形 A 脉冲位置传感器脉冲格 Phase current under rated speed and full power U相 B 脉冲格格 V相(b 采用 MTPA 法 t (1格图8 Fig. 8 低速下位置传感器脉冲输出图图 11 两倍额定转速下的相电流波形格相电流格格转速格相电流和转速波形 t格图 12 F格从零启动到最大转速时的相电流波形 Phase current when speed rise from zero to max speed 5 结论本文提出了一种感应电动机转子磁场定向时的弱磁控制算法,该算法有如下特点:格)不需采样直流母线电压,不需要查表,通过对零电压矢量的作用时间的积分来进行弱磁运算,充分利用了逆变器的输出能力,是一种适应能力较强的算法;(b iq 和 id 波形图9 Fig. 9 突加/突减转速时的响应过程 Response to speed step up and down 2)除了感应电动机的漏感系数外,不需要知道电机的其它参数,因此算法对参数的依赖性小;图 12 为从零启动到最高转速过程中的相电流波形,可以看到启动时间约为,满足实际应用的要求。
3)采用 MTPA 算法可以提高感应电动机的低速稳态性能。
第 30 期万山明等:感应电动机转子磁场定向下的弱磁控制算法drives[C]//First international Power and 99 Energy 参考文献 [1] Xu Xingyi, Novotny D W. Selecting the flux reference for induction machine drives in the field weakening region[C]//Conference Record of the 1991 IEEE Industry Applications Society Annual Meeting . Dearborn , Michigan,USA:IEEE Industry Applications Society,1991:361-367 [2] 李叶松,雷力.基于转子磁场定向的异步电动机弱磁方法研究[J].电力电子技术,2007,41(5:34-35. Li Yesong, Lei Li. Research on flux weakening control for the rotor flux oriented control of an induction motor[J]. Power Electronics,2007,41(5:34-35(in Chinese. [3] Kim S H , Sul S K . Maximum torque control of an induction machine in the field weakening region[J].IEEE Transactions on Industry Applications , 1995 , 31(4 : 787-794. [4] Yusivar F,Kihara T,Sato M,et al.| I q | added flux weakening strategy for the rotor flux oriented control of a sinusoidal PWM VSI-fed induction motor[C]//The 27th Annual Conference of the IEEE Industrial Electronics Society . Denver , Colorado ,USA : IEEE Industrial Electronics Society,2001:1160-1165. [5] Kim S H,Sul S K.Voltage control strategy for maximum torque operation of an induction machine in the fieldweakening region[J] . IEEE Transactions on Industrial Electronics,1997,44(4:512-518. [6] Grotstollen H, Wiesing J. Torque capability and control of a saturated induction motor over a wide range of flux weakening[J] . IEEE Transactions on Industrial Electronics,1995,42(4:374-381. [7] Bianchi N,Bolognani S.Design procedure of a vector controlled induction motor for flux-weakening operations [C]//Conference Record of the 1997 IEEE Industry Applications Conference. New Orleans, LA, USA: IEEE Industry Applications Society,1997:104-111. [8] Briz F,Diez A,Degner M W,et al.Current and flux regulation in field-weakening operation of induction motors[J].IEEE Transactions onIndustry Applications, 2001,37(1:42-50. [9] Ahmad M Z,Idris N R N.Overmodulation and field weakening in direct torque control of induction motor Conference . Putrajaya , Malaysia : IEEE Power Engineering Society Malaysia Chapter,2006:465-469. [10] Bolognani S , Zigliotto M . Novel digital continuous control of SVM inverters in the overmodulation range[J]. IEEE Transactions on Industry Applications, 1997, 33(2: 525-530. [11] Shin M H,Hyun D S, Cho S B. Maximum torque control of stator-flux-oriented induction machine drive in the field-weakening region[J].IEEE Transactions on Industry Applications,2002,38(1:117-122. [12] 吴芳,万山明,黄声华.一种过调制算法及其在永磁同步电动机弱磁控制中的应用[J].电工技术学报,2010, 25(1:59-63. Wu Fang , Wan Shanming , Huang Shenghua . An overmodulation algorithm and its application in PMSM drive with flux-weakening control[J] . Transactions of China Electrotechnical Society,2010,25(1:59-63(in Chinese. [13] Harnefors L ,Pietilainen K , Gertmar L . Torquemaximizing field weakening control:Design,analysis, and parameter selection[J] . IEEE Transactions on Industrial Electronics,2001,48(1:161-168. [14] Casadei D, Mengoni M, Serra G, et al. Field-weakening control schemes for high-speed drives based on induction motors : a comparison[C]//IEEE Power Electronics Specialists Conference.Rhodes,Greece:IEEE,2008: 2159-2166. [15] Lin P Y,Lai Y S.Novel voltage trajectory control for field-weakening operation of induction motor drives[J]. IEEE Transactions on Industry Applications, 2011, 47(1: 122-127.收稿日期:2011-06-02。
第52卷2019年 第10期10月MICROMOTORSVol 52.No 10Oct 2019感应电机弱磁控制研究吴昭玄,刘 涛,李启东,童乔凌(华中科技大学光学与电子信息学院,武汉430074)摘 要:电动机中,异步感应电机具有低成本,结构简单,可靠性高的优点,因此得到了广泛的应用.在感应电机的控制过程中,主要存在的问题是,当电机运行到额定速度,提速存在困难。
本文结合软硬件平台和仿真工具Mat lab/Simulink,对以上问题进行分析,并给出了合理的解决方式。
先抽象出电机的数学模型,对电机的运行原理进行了详细的分析,确定了矢量控制的总体策略。
随后提出基于漏磁系数的电压闭环弱磁算法,接着进行仿真对比。
为了验证仿真结果,搭建了感应电机驱动器的软硬件平台,完成设计与调试。
通过仿真与实际测试的结果,发现本文的弱磁控制策略用在感应电机上能提升高速下电机运行性能,使电机速度提升快,力矩大,而且电机的动静态特性均有明显改善。
关键词:弱磁控制;漏磁系数;SVPWM控制;异步感应电机;Simulink仿真中图分类号:TM343+ 2 文献标志码:A 文章编号:1001 6848(2019)10 0036 07ResearchonWeakMagneticControlofInductionMotorWUZhaoxuan,LIUTao,LIQidong,TONGQiaoling(HuazhongUniversityofScienceandTechnology,Wuhan430074,China)Abstract:Amongtheelectricmotors,theasynchronousinductionmotorhastheadvantagesoflowcost,simplestructureandhighreliability,soithasbeenwidelyused.Inthecontrolprocessoftheinductionmotor,themainproblemisthatwhenthemotorrunstotheratedspeed,itisdifficulttospeedup.Thispapercom binedthesoftwareandhardwareplatformandsimulationtoolMatlab/Simulinktoanalyzetheaboveproblemsandgiveareasonablesolution.Firstly,themathematicalmodelofthemotorwasabstracted,andtheoperat ingprincipleofthemotorwasanalyzedindetail,andtheoverallstrategyofvectorcontrolwasdetermined.Avoltageclosed loopweakmagneticalgorithmbasedonmagneticfluxleakagecoefficientwasthenproposed,followedbysimulationcomparison.Inordertoverifythesimulationresults,asoftwareandhardwareplatformfortheinductionmotordriverwasbuilt,completedesignandcommissioning.Throughthesimulationandac tualtestresults,itisfoundthattheweakmagneticcontrolstrategyusedintheinductionmotorcanimprovetherunningperformanceofthemotorathighspeed,makethemotorspeedincreasefast,thetorqueislarge,andthedynamicandstaticcharacteristicsofthemotorareobviouslyimproved.Keywords:weakmagneticcontrol;magneticfluxleakagecoefficient;SVPWMcontrol;asynchronousin ductionmotor;Simulinksimulation收稿日期:20190424作者简介:吴昭玄(1995),男,硕士研究生,研究方向为电机及其控制。
第26卷 第9期计 算 机 仿 真2009年9月 文章编号:1006-9348(2009)09-0293-04新的弱磁算法应用于感应电机的D TC控制王乐荣,刘贺平(北京科技大学,北京100083)摘要:提出了一种新的弱磁算法应用于感应电机的直接转矩控制。
基本思想是根据给定转速值与实际机械转速的误差来调节磁通参考值,实现快速的弱磁控制。
传统的弱磁控制算法需要计算基速,而提出的新算法不需要知道基速值,并且基本不依赖电机的参数。
通过分析直接转矩控制不同时刻的最大转矩,推导出了新的弱磁算法的模型。
对提出的算法进行了仿真,并与没有采用弱磁算法的传统的直接转矩控制进行了比较,通过仿真结果可以看出新算法的有效性。
关键词:弱磁算法;感应电机;直接转矩控制;仿真中图分类号::T M743 文献标识码:AA New Flux-W eaken i n g A lgor ith m for D TC of I nducti on M ach i n eWANG Le-r ong,L I U He-p ing(University of Science and Technol ogy,Beijing100083,China)ABSTRACT:A ne w flux-weakening algorith m f or direct t orque contr ol(DTC)of inducti on machine is p r oposed.The basic idea is t o adjust the flux reference on the basis of the mechanical s peed err or,thus deter m ining a s pon2tanous flux weaking.The tradit onal flux-weaking algorith m has t o calculate the base s peed.The ne w algorith mneedn’t know the base s peed and it is basically independent of the machine para meters.A model of direct t orquecontr ol of inducti on machine using the ne w algorith m is established according t o the analysis of the maxi m un t orque ofdirect t orque contr ol(DTC)of inducti on machine,and its si m ulati on research is perf or med.The si m ulati on results ofthe p r oposed contr ol algorith m is compared with that of the classical direct-t orque-contr ol.Si m ulati on results de m2onstrate the effectiveness of the contr ol sche me.KE YWO RD S:Flux-weakening;I nducti on machine;D irect t orque contr ol(DTC);Si m ulati on1 引言在很多实际应用中,电机在低速运行时保持恒定的转矩,如果功率恒定,那么在中高速的情况下电机的电磁转矩就会减小。
感应电机弱磁区转矩输出与电流动态性同步提升控制策略摘要:弱磁控制技术是感应电机高速驱动的核心技术之一,传统弱磁方案存在直流母线电压利用率低与电压饱和问题,造成弱磁区感应电机输出转矩不足与电流动态性变差的问题。
为提升弱磁区电压利用率并抑制电压饱和,同步提升弱磁区输出转矩与电流动态性,基于此,对感应电机弱磁区转矩输出与电流动态性同步提升控制策略进行研究,以供参考。
关键词:感应电机;弱磁区;转矩输出;电流动态性;同步提升;控制策略引言目前,实现弱磁控制下交直轴电流给定的在线方法有电压反馈法、在线模型计算法和先验数据查表法。
电压反馈法通过增加一个电压环反馈实现弱磁电流的控制,该方法简单有效,并且不依赖参数,但无法实现最大转矩电压比的控制。
1概述感应电机(inductionmotors,IMs)高速驱动广泛应用于工业生产与日常生活当中,如电动汽车和钻孔机等场合。
在工业加工领域,感应电机高速驱动主要有如下三方面的性能需求:(1)要求尽可能高的最高转速以保证工件加工精度以及工件表面光滑度;(2)尽可能快的加减速性能,以缩短电机达到给定转速的时间,提高生产效率。
(3)优秀的电流动态性能,以使电流快速跟随给定,提升电机的抗扰性能。
针对需求(1),需要通过弱磁(field-weakening,FW)控制提高感应电机最大运行速度。
然而,弱磁控制不可避免地会造成输出转矩的下降,导致感应电机承载能力下降。
输出转矩的下降会减弱电机的加减速性能,即需求(2)无法被满足。
另一方面,转速的提升导致反电势升高,造成电压裕量的不足,最终会造成电流动态性的下降,即需求(3)无法被满足。
2感应电机弱磁区最大转矩轨迹理论在基于转子磁链定向的矢量控制系统中,感应电机的电压方程可表示为:式中:usd,q为同步旋转坐标系中的d,q轴定子电压分量;isd,q为d,q轴定子电流分量;ωe为同步频率;σ为漏感因子,σ=1-L2m/(LsLr);Rs为定子电阻;Ls,Lr,和Lm分别为定子电感,转子电感,与互感;λr为转子磁链;p为微分算子。
感应电机在弱磁区的电流解耦控制研究刘军锋,李叶松(华中科技大学控制科学与工程系,湖北武汉430074)摘要:为了实现感应电机的宽范围调速,针对按转子磁场定向时,d,q 轴电流的耦合效应,引入复平面矢量分析法,建立了感应电机的电压)电流矢量模型,分析了同步旋转PI 控制器在解耦方面的不足,提出了评价耦合强度的频率函数。
在复数传递函数的基础上,提出了一种电流矢量控制器,该控制器在确定系数后,无需电机参数,就可在宽调速范围内实现电流解耦控制。
实验结果证明了该方法的有效性和正确性。
关键词:感应电机;弱磁控制;电流控制;解耦控制中图分类号:T M 346 文献标识码:AResearch for C urrent Decoupling Control of Induction Motor in Field -weakening RegionL IU Jun -feng ,L I Ye -song(D ep ar tment o f Co ntr ol Science and Eng ineer ing ,H uaz hong Univer sity of Science andT echnology ,W uhan 430074,H ubei,China)Abstract:In order t o implement the speed regulation in a w ide r ang e,the complex v ecto r analysis method was intr oduced aimed to the cr oss co upling of d,q ax is curr ent o f induction moto r based on ro tor flux o rienta -tion.T he vo ltag e -cur rent vecto r model w as established.T he lack o f decoupling of synchronous fr ame PI con -tr oller was ana lyzed.A fr equency function w hich is used to ver dict stiffness o f coupling was pr esented.A cur -r ent v ect or co nt roller w as pr esented based o n complex tr ansfer function.Decoupling co nt rol of cur rent in a wide speed range can be realized dispensing w ith motor parameter s after the contr oller coefficients ar e deter -mined.T he va lidity of this method has been appro ved by ex perimental results.Key words:inductio n mo tor;field -w eakening co nt rol;curr ent co ntr ol;deco upling contr ol作者简介:刘军锋(1979-),男,博士后,Email:saviola_ljf@1 引言当前,采用矢量控制技术即磁场定向技术的全数字感应电机交流调速系统已广泛应用于诸多领域。