基于激光雷达的三维室内环境信息采集与显示系统
- 格式:pdf
- 大小:149.41 KB
- 文档页数:3
智能家居激光雷达在室内定位中的应用近年来,随着科技的发展与智能家居的兴起,越来越多的人开始关注智能家居激光雷达在室内定位中的应用。
激光雷达技术作为一种高精度、高可靠性的定位技术,其在室内定位中的应用前景备受瞩目。
一、智能家居激光雷达的原理智能家居激光雷达主要通过向室内环境发射激光束,并通过接收返回的激光信号来获取物体的位置和距离。
在室内环境中,激光束可以在墙壁、家具等物体上发生反射,从而实现对室内环境的精确感知。
通过多次扫描和计算,智能家居激光雷达可以实时地获取物体在室内的位置和移动轨迹。
二、智能家居激光雷达的应用场景1. 室内导航和路径规划智能家居激光雷达可以用于室内导航和路径规划,为用户提供更加智能和舒适的居住体验。
通过在室内布置一定数量的激光雷达设备,可以实时感知用户的位置并提供最佳路径规划。
用户可以通过搭载智能设备,如手机或智能手表,方便地查找房间、指引出行路径等,提高生活便利度和舒适度。
2. 安全监控和智能防护智能家居激光雷达可以应用于安全监控和智能防护领域,提供全方位的室内监测和警报功能。
通过激光雷达的感知和识别能力,可以及时发现室内异常情况,如入侵者、火灾等,并通过智能家居系统发送警报信息。
这不仅提供了更加安全的居住环境,也为用户提供了更多的安全保障。
3. 室内空气质量监测智能家居激光雷达也可以应用于室内空气质量监测中。
通过激光雷达的技术,可以实时检测室内空气中的PM2.5、二氧化碳浓度等指标,并提供相应的数据分析和报告,以帮助用户更好地关注室内环境的健康与舒适。
三、智能家居激光雷达的发展趋势随着智能家居市场的不断扩大和技术的不断创新,智能家居激光雷达在室内定位中的应用前景非常广阔。
未来,可以预见,激光雷达设备将变得更加小巧轻便,成本也会进一步降低,使得更多的家庭能够享受到智能家居带来的便利和舒适。
另外,人工智能技术的快速发展也将极大地推动智能家居激光雷达的应用。
通过人工智能算法的不断优化,智能家居激光雷达可以获取更加精确和稳定的室内定位信息,进一步提高室内定位的准确性和可靠性。
激光雷达数据采集与处理流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!1. 激光雷达系统设置选择合适的激光雷达传感器,根据应用需求确定其参数,如测量范围、分辨率、精度等。
激光slam技术的原理和应用激光SLAM技术的原理和应用激光SLAM(Simultaneous Localization and Mapping)技术是一种基于激光雷达的同时定位和建图技术,它通过使用激光雷达扫描环境,实时获取周围的地理信息,并利用这些信息进行自主定位和建立环境地图。
激光SLAM技术的原理可以概括为以下几个步骤:1. 数据获取:激光雷达通过发射激光束并接收反射回来的光线,利用光的传播速度和接收时间差计算出距离信息。
通过旋转或调整激光雷达的角度,可以获取周围环境的三维点云数据。
2. 特征提取:从激光雷达获取的点云数据中,提取出具有代表性的特征点,如角点、平面点等。
这些特征点可以用来进行地图的构建和定位。
3. 地图构建:通过特征点的集合,可以构建环境的地图。
构建地图的算法可以根据特征点的位置和特征进行优化和调整,以减少地图的误差。
常见的地图表示方式有栅格地图、拓扑地图和点云地图等。
4. 定位更新:在地图构建的同时,激光SLAM技术还可以实时进行自主定位。
通过与地图进行匹配,可以确定机器人当前的位置。
定位更新可以通过滤波算法(如卡尔曼滤波、粒子滤波等)来实现,以提高定位的准确性。
激光SLAM技术的应用非常广泛,以下列举几个常见的应用领域:1. 自动驾驶:激光SLAM技术是实现自动驾驶的关键技术之一。
通过激光雷达扫描周围环境,实时构建高精度的地图,并实现精确定位,可以使自动驾驶车辆在复杂道路条件下实现精确的定位和路径规划。
2. 无人机导航:激光SLAM技术在无人机导航中也有广泛的应用。
通过激光雷达扫描周围地形,可以构建高精度的地图,并实现无人机的自主定位和避障,实现精确的飞行路径规划。
3. 室内导航:激光SLAM技术可以应用于室内导航系统中。
通过激光雷达扫描室内环境,构建室内地图,并实现用户的定位和导航。
这对于大型建筑物、商场等复杂环境的室内导航非常有用。
4. 智能仓储:激光SLAM技术可以应用于智能仓储系统中,实现自动化的货物搬运和仓库管理。
使用激光雷达进行三维测量的方法激光雷达是一种常用的测量技术,可以高效地获取三维空间中物体的形状和位置信息。
在工业、建筑、航空等领域广泛应用。
本文将介绍使用激光雷达进行三维测量的方法。
一、激光雷达原理激光雷达利用激光束在空间中进行扫描,通过测量激光束的发射和回波时间来计算目标物体的距离。
其工作原理类似于声纳,只不过利用的是激光而非声波。
激光雷达一般由激光发射器、接收器、控制电路和数据处理单元等组成。
激光发射器发射出脉冲激光束,激光束照射到目标物体上并反射回来,接收器接收返回的光信号。
通过测量发射激光和接收回波之间的时间差,可以计算出目标物体与激光雷达的距离。
二、激光雷达测量方法使用激光雷达进行三维测量主要分为两种方法:主动测量和被动测量。
1. 主动测量主动测量是指激光雷达主动发射激光束进行测量。
这种方法可以获取目标物体的具体坐标和形状信息。
主动测量需要配备高性能的激光雷达设备,一般用于工程测量、地形测绘和机器人导航等应用中。
2. 被动测量被动测量是指利用激光雷达接收环境中的外部光源反射的光信号进行测量。
这种方法通常用于室内定位与导航、三维重建和智能驾驶等领域。
被动测量不需要发射激光,因此成本较低,适用范围更广。
三、使用激光雷达进行三维测量步骤使用激光雷达进行三维测量一般包括以下几个步骤:1. 设定测量范围:根据需要测量的目标物体或区域设定测量范围。
2. 放置激光雷达:根据测量范围的大小和形状,选择合适的位置放置激光雷达设备。
确保激光雷达可以全方位扫描到目标物体。
3. 启动激光雷达:按照激光雷达的操作手册启动设备,确保设备能够正常工作。
4. 数据采集:激光雷达在工作过程中会不断扫描目标物体,采集大量数据。
这些数据可以用于后续的分析和处理。
5. 数据处理:对采集到的数据进行去噪、滤波和分割等处理,提取目标物体的边界和形状信息。
6. 建立三维模型:根据处理后的数据,可以建立目标物体的三维模型,包括几何信息和纹理信息。
基于双目视觉和单线激光雷达的三维场景重建系统和算法钟雷声;夏辉;陈佳林
【期刊名称】《测绘通报》
【年(卷),期】2024()5
【摘要】双目视觉和激光雷达是实现三维场景重建的两种有效方法,但它们都具有自身的局限性。
将视觉传感器和激光传感器的数据相融合,可克服其各自的缺陷,具有重要意义。
本文针对单线旋转激光雷达设备的独特性,提出了一种基于双目图像和激光雷达数据的模块化双目视觉-激光雷达SLAM(Stereo-LiDAR SLAM)系统和算法。
在该方法中,双目视觉信息被用于消除激光雷达点云的畸变,并支撑双目视觉定位(VO)模块,为整个系统提供初始的位姿估计。
然后,独立于VO模块的激光雷达SLAM(L-SLAM)模块对位姿参数进行优化,从而得到高精度的三维场景重建结果。
试验表明,本文设计的系统和算法可以有效提高大规模低成本三维场景重建的精度和环境适应能力。
【总页数】6页(P48-52)
【作者】钟雷声;夏辉;陈佳林
【作者单位】92728部队
【正文语种】中文
【中图分类】P237
【相关文献】
1.基于激光雷达的室内场景三维重建系统设计
2.基于单线激光雷达的三维形貌重建方法研究
3.浅析核电站大直径异形钢模块预制吊装场地处理施工技术
4.基于摆动单线激光雷达的大场景稠密点云地图创建系统
5.基于双目视觉的三维场景图像表面重建算法
因版权原因,仅展示原文概要,查看原文内容请购买。
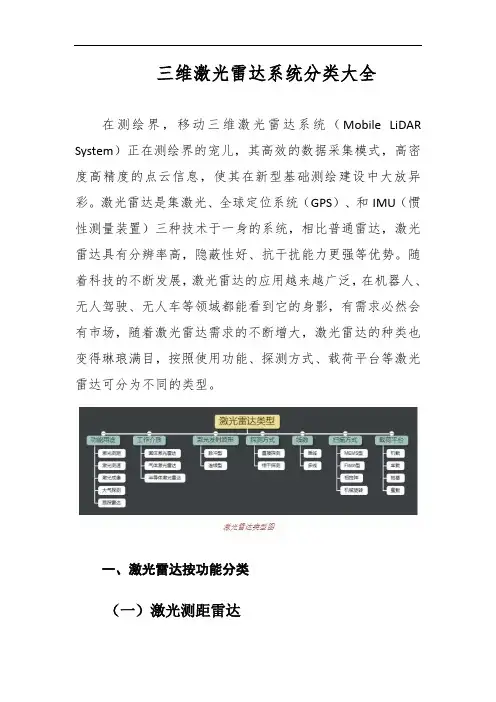
三维激光雷达系统分类大全在测绘界,移动三维激光雷达系统(Mobile LiDAR System)正在测绘界的宠儿,其高效的数据采集模式,高密度高精度的点云信息,使其在新型基础测绘建设中大放异彩。
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰能力更强等优势。
随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影,有需求必然会有市场,随着激光雷达需求的不断增大,激光雷达的种类也变得琳琅满目,按照使用功能、探测方式、载荷平台等激光雷达可分为不同的类型。
一、激光雷达按功能分类(一)激光测距雷达激光测距雷达是通过对被测物体发射激光光束,并接收该激光光束的反射波,记录该时间差,来确定被测物体与测试点的距离。
传统上,激光雷达可用于工业的安全检测领域,如科幻片中看到的激光墙,当有人闯入时,系统会立马做出反应,发出预警。
另外,激光测距雷达在空间测绘领域也有广泛应用。
但随着人工智能行业的兴起,激光测距雷达已成为机器人体内不可或缺的核心部件,配合SLAM技术使用,可帮助机器人进行实时定位导航,,实现自主行走。
思岚科技研制的rplidar系列配合slamware模块使用是目前服务机器人自主定位导航的典型代表,其在25米测距半径内,可完成每秒上万次的激光测距,并实现毫米级别的解析度。
(二)激光测速雷达激光测速雷达是对物体移动速度的测量,通过对被测物体进行两次有特定时间间隔的激光测距,从而得到该被测物体的移动速度。
激光雷达测速的方法主要有两大类,一类是基于激光雷达测距原理实现,即以一定时间间隔连续测量目标距离,用两次目标距离的差值除以时间间隔就可得知目标的速度值,速度的方向根据距离差值的正负就可以确定。
这种方法系统结构简单,测量精度有限,只能用于反射激光较强的硬目标。
另一类测速方法是利用多普勒频移。
读取三维激光雷达数据的方法全文共四篇示例,供读者参考第一篇示例:三维激光雷达是一种利用激光束扫描周围环境并测定距离的传感器,常用于无人车、机器人和其他自动化设备中。
读取三维激光雷达数据是很重要的一步,因为这些数据可以用来构建地图、定位车辆或物体以及进行障碍物检测等功能。
本文将介绍一些常见的方法来读取三维激光雷达数据。
一、使用ROS系统读取激光雷达数据ROS(机器人操作系统)是一个用于机器人开发的开源软件框架,提供了各种功能包来简化机器人开发过程。
在ROS中,可以使用激光雷达传感器插件来读取激光雷达数据。
首先需要安装激光雷达驱动程序,然后在ROS中启动对应的节点来获取激光雷达数据。
通过ROS系统,可以实时获取激光雷达的测量数据,并进行后续的数据处理。
在Python中,可以使用各种库来读取激光雷达数据,如pyserial、numpy和matplotlib等。
首先需要通过串口连接激光雷达传感器,并设置好串口通信参数。
然后通过Python代码来读取激光雷达发送的数据,并进行解析和处理。
最后可以使用matplotlib库来可视化激光雷达数据,方便用户进行数据分析和调试。
C++是一种高效的编程语言,常用于机器人和嵌入式系统开发。
在C++中,可以使用ROS或者自定义的串口通信库来读取激光雷达数据。
通过C++代码,可以实现高速的数据读取和处理,适用于对性能要求较高的场景。
C++也可以方便地集成到其他系统中,实现更复杂的功能。
四、数据处理和应用读取激光雷达数据后,通常需要进行数据处理和应用。
常见的数据处理包括滤波、配准、拼接等操作,用于提高数据质量和建立精确的环境地图。
还可以基于激光雷达数据进行SLAM(Simultaneous Localization and Mapping)定位和建图,实现机器人自主导航和定位功能。
还可以应用深度学习技术对激光雷达数据进行物体识别和场景分析,为机器人智能决策提供支持。
总结读取三维激光雷达数据是实现各种机器人应用的基础,通过合适的方法和工具,可以高效地获取和处理激光雷达数据,为后续的应用提供支持。
信息通信INFORMATION & COMMUNICATIONS2019年第6期(总第198期)2019(Sum. No 198)基于激光雷达的室内玻璃三维重建算法陈浩(北方工业大学信息学院,北京100144)摘要:针对激光雷达在室内地图重建过程中,担描不到透明玻璃的问题,文章提出了 一种玻璃检测三维重建算法,实现了 三维地图中玻璃的重建。
该方法将三维激光雷达担描的点云经过点云滤波、分割、聚类以及运动匹配,提取出感兴趣的透明玻璃上的点云,从而识别出室内场景中的透明玻璃。
实验结果显示,该算法能有效地使用激光雷达数播检测玻璃并进行三维地图重建。
关键词:三维地图构建;激光雷达;透明玻璃;检测中图分类号:TP391 文献标识码:A 文章编号:1673-1131(2019)06-0044-03The Indoor Glass 3D Reconstruction Technology Based on Laser RadarChen Hao(North China University ofTechnology, School of Ioformation, Bering 100144, China)Abstract: Aiming at the problem that the transparent glass can not be scanned by laser radar in the process of indoor map re construction, a 3D reconstruction algorithm of glass detection is proposed and realize the reconstruction of the glass in the 3d map. This method extracts the point clouds on the interested transparent glass through point cloud 五ltering, segmentation, clustering and motion matching. The experimental results show that the algorithm can detect the glass effectively and reconstruct the 3D map.Key words: 3D Map Construction; Laser Radaq Transparent Glass; Detection 0引言在人工智能技术飞速发展的今天,机器人学作为一门理论性和实践性都非常重要的交叉型复合学科,渗透到人们衣食住行各个方面,而机器人的定位和地图构建技术是其中的技术叫移动机器人同时定位与地图构建(Simultaneous Loc alization and Mapping) SLAM 技术自其诞生以来一直是机器人研究领域的关注点和重点。
基于二维激光雷达的自动室内三维重建系统
苏胜利;项志宇
【期刊名称】《传感技术学报》
【年(卷),期】2007(020)005
【摘要】设计了一个基于二维激光雷达的自动室内三维重建系统.系统的硬件由一套自行设计的基于2D激光雷达的三维扫描系统和一台电脑构成.介绍了系统的软件模块,提出了结合最近点迭代(ICP)和通用多边形裁剪(GPC)的3D平面场景合成方法.ICP能够获得不同采集位置之间的位置变化,以此能将各个不同位置获得的3D 场景转换到同一坐标系下.场景合成时的碎平面问题通过GPC方法来解决.实验结果表明:该系统成本低,精度高,能稳定可靠地实现室内场景的自动三维重建.
【总页数】5页(P985-989)
【作者】苏胜利;项志宇
【作者单位】浙江大学信息科学与工程学院,杭州,310027;浙江大学信息科学与工程学院,杭州,310027
【正文语种】中文
【中图分类】TP391
【相关文献】
1.一种基于图像的室内大场景自动三维重建系统 [J], 张峰;史利民;孙凤梅;胡占义
2.基于激光雷达的室内玻璃三维重建算法 [J], 陈浩
3.基于激光雷达的室内场景三维重建系统设计 [J], 张明; 王铉; 陈柯颖
4.噪声背景下基于激光雷达点云数据的分裂导线自动提取与三维重建 [J], 谢洪平; 陈兵; 杜长青; 孙铭泽; 王磊磊; 生红莹
5.基于室内结构特征的二维激光雷达与相机标定方法 [J], 张磊;徐孝彬;何佳;朱开源;骆敏舟;谭治英
因版权原因,仅展示原文概要,查看原文内容请购买。

基于FPGA的激光雷达SLAM测绘设计与实现全文共四篇示例,供读者参考第一篇示例:激光雷达(SLAM)技术是近年来在自动驾驶、无人机和机器人领域得到广泛应用的一项重要技术。
SLAM技术通过激光雷达传感器获取周围环境的三维点云数据,并通过实时定位和地图构建技术,实现对环境的精准感知和定位。
在SLAM算法中,激光雷达传感器是最为重要的数据采集装置,因此其性能和精度对整体SLAM系统的性能有着至关重要的影响。
传统的激光雷达SLAM系统通常通过CPU或GPU来实现激光数据的处理和算法的执行,然而随着SLAM系统的实时性要求越来越高,CPU或GPU的运算能力已经无法满足SLAM系统的需求。
利用基于FPGA(Field Programmable Gate Array)的并行计算架构来实现激光雷达SLAM系统成为一个新的研究方向。
FPGA具有高度并行化的特点和灵活的可编程性,能够快速、高效地处理激光数据,并且可以实现实时的SLAM算法执行。
基于FPGA的激光雷达SLAM测绘设计与实现成为了当前研究的热点之一。
一、激光雷达SLAM系统的核心技术激光雷达SLAM系统主要包括传感器数据采集、数据处理和算法执行三个核心环节。
传感器数据采集环节主要负责激光雷达传感器数据的获取和预处理;数据处理环节主要负责对激光雷达数据进行滤波、分割和配准等预处理操作;算法执行环节主要负责执行SLAM算法,实现定位和地图构建等功能。
在基于FPGA的激光雷达SLAM系统中,需要针对以上三个环节进行对应的硬件设计和实现。
1. 传感器数据采集由于激光雷达传感器输出的是大规模的三维点云数据,因此传感器数据采集环节对FPGA的硬件设计要求较高。
首先需要设计一个高速的数据接口模块,能够实时接收和存储激光雷达传感器输出的数据流。
其次需要设计一个数据预处理模块,能够对传感器输出的原始数据进行去噪、滤波和格式转换等操作,以适配后续的数据处理环节。
2. 数据处理数据处理环节需要设计一个高性能的并行计算模块,能够实现激光数据的滤波、分割和配准等操作。
如何使用激光雷达进行三维地图绘制现代科技发展迅猛,在各行各业都有着广泛的应用,而激光雷达则是其中一种常见的技术。
它利用光束在空间中扫描并测量,可以精确地绘制三维地图。
激光雷达在自动驾驶、机器人导航、地图绘制等领域具有广泛的应用前景。
本文将介绍激光雷达的工作原理、数据处理方法以及其在三维地图绘制中的应用。
首先,我们来了解一下激光雷达的工作原理。
激光雷达利用激光束在空间中扫描并测量物体的距离和位置。
它通过发送一束激光束,激光束在空间中形成一个扫描面,然后通过接收器接收反射回来的激光束。
通过测量发送激光束与接收到的激光束之间的时间差,并结合激光的速度,可以计算出物体与激光雷达的距离。
通过不断扫描并记录物体的位置和距离,可以实现对物体三维位置的精确测量。
在激光雷达的数据处理中,最关键的一步是点云数据的处理。
点云数据是激光雷达扫描到的物体的位置和距离信息,通常表示为三维坐标系下的点集。
点云数据非常庞大,处理起来十分复杂。
为了有效地处理这些数据,需要进行滤波、配准和分割等处理。
首先是滤波处理。
由于环境中会存在噪声点和杂乱点,这些点会对地图的精度和准确性造成影响。
因此,需要对点云数据进行滤波处理,去除噪声点和杂乱点。
常见的滤波方法有高斯滤波和中值滤波等。
接下来是配准处理。
配准是将多个点云数据集合并为一个整体的过程。
在实际中,我们可能使用多个激光雷达设备,需要将它们采集到的点云数据进行整合。
配准的目标是将多个点云数据转化为相同的坐标系,并保持它们在整体地图中的位置和角度的一致性。
最后是分割处理。
分割是将点云数据进行划分,将同一物体的点云分为一组,以便后续的处理。
在三维地图绘制中,常常需要将不同的物体分开表示,比如建筑物、道路和树木等。
分割可以通过聚类方法或者模型拟合方法来实现。
激光雷达在三维地图绘制中有着广泛的应用。
首先,它可以用于建立精确的室内地图。
在室内环境中,激光雷达可以扫描各种物体的位置和距离信息,包括墙壁、家具和设备等。
使用激光雷达进行三维测绘的步骤和技巧引言随着科技的进步和发展,三维测绘成为了如今的热门话题之一。
而在众多的三维测绘技术中,激光雷达是一种普遍被认为是最为准确和高效的测绘工具之一。
本文将介绍使用激光雷达进行三维测绘的基本步骤和一些常用的技巧,以帮助初学者更好地了解和应用该项技术。
一、选择合适的激光雷达设备在开始激光雷达三维测绘之前,第一步就是选择合适的激光雷达设备。
激光雷达设备的选购应根据实际需求确定,包括测量范围、精度要求、数据采集速度等因素。
在市场上有很多种类和品牌的激光雷达设备可供选择,合理评估需求和比较不同设备的性能是非常重要的。
二、设置测绘区域和目标激光雷达测绘通常需要在特定的区域内进行。
在进行测绘之前,需要确定测绘区域的范围,并确保该区域内的目标物体符合测绘要求。
同时,还需要将测绘区域内的障碍物、光照条件等因素考虑在内,以保证数据采集的准确性和可靠性。
三、进行数据采集数据采集是激光雷达三维测绘过程中最关键的一步。
在数据采集之前,需要将激光雷达设备安装到合适的位置,以获得最佳的测量效果。
数据采集时,激光雷达设备会发射一束激光束,通过对目标物体反射回来的激光进行测量,进而得到目标物体的三维坐标信息。
在数据采集过程中,需要注意保持设备的稳定性和运动的平稳性,以避免数据采集时的误差。
四、数据处理与分析数据采集完成后,接下来需要对采集到的数据进行处理和分析。
数据处理和分析的目的是提取有用的信息和建立三维模型。
这一步骤通常包括数据预处理、点云配准、特征提取等过程。
通过数据处理和分析,可以获得更精确和全面的三维测绘数据,为后续的应用提供支持。
五、应用与展示激光雷达三维测绘的最终目的是为后续的应用和展示提供基础数据。
根据实际需求,可以将测绘得到的三维数据用于建筑设计、地理信息系统、智能交通等领域。
此外,还可以通过点云配准、特征提取等技术手段,生成真实感十足的虚拟场景,实现虚拟现实、增强现实等应用。
六、技巧与注意事项使用激光雷达进行三维测绘需要注意以下一些技巧和注意事项:1. 选择合适的扫描模式和参数,根据实际情况进行调整,以获取最佳的测量效果。
激光雷达三维点云可视化模型原理激光雷达扫描物体时,会得到大量散点数据。
When the laser radar scans an object, it will obtain a large amount of scattered data.这些散点数据可以被整合成三维点云模型。
These scattered data can be integrated into a three-dimensional point cloud model.三维点云模型可以反映出物体的立体形状和表面特征。
The three-dimensional point cloud model can reflect the three-dimensional shape and surface features of the object.激光雷达通过扫描不同角度的物体来获取更多的散点数据。
The laser radar obtains more scattered data by scanning the object from different angles.然后,这些散点数据被转换为点云形式,并进行处理。
Then, these scattered data are converted into point cloud form and processed.通过处理,可以得到更加清晰和真实的三维点云模型。
Through processing, a clearer and more realistic three-dimensional point cloud model can be obtained.在三维点云模型中,每个点都包含了空间坐标和反射强度信息。
In the three-dimensional point cloud model, each point contains spatial coordinates and reflection intensity information.借助计算机图形学技术,可以对三维点云模型进行可视化展示。
机载激光雷达(Lidar)数据采集及数据处理摘要:Lidar是指安装在飞机上的测距与机载激光探测系统,量测地面物体的三维坐标,从而生产Lidar数据影像。
Lidar数据通过相关软件数据处理之后,就能够生成精度较高的数字地面模型DEM、正射影像图和等高线图。
近年来,网络通讯技术、计算机技术、激光测距技术及GPS技术等技术的不断发展成熟,机载激光雷达技术正蓬勃发展,欧美等一些发达国家逐步研制出很多种机载激光雷达测量系统,主要包括 LeicaALS50,Optech等等,它的应用已超国遥感所覆盖的范围和传统测量,成为一种特有的数据获取方式。
一、机载激光雷达机载激光雷达是导航系统、全球定位系统以及激光惯性3种技术集于一身的空间测量系统(如图1)。
此系统是将惯性导航系统、激光扫描仪、GPS接受机、数码相机以及控制元件等搭载在载体的飞机之上。
它主动朝地面发射激光脉冲,接受反射脉冲并对所使用的时间及时记录,计算出激光扫描仪距离地面的距离,POS系统所测得的姿态信息和位置能够计算出地面点的三维坐标。
图1 机载激光雷达系统比较传统的摄影测量,激光雷达可以进行直接获取目标的三维信息,数据到有用信息的过程得以缩短。
激光雷达的明显特征是激光能够穿透植被的叶面抵达地表,同时获取植被和地面的信息,探测细小目标也可以被探测到,从而获取的数据信息丰富,目前来说是其他技术所不及的。
二、数据的采集1、数据采集前准备工作在数据采集之前需要进行多方面详细周密的准备工作,其中主要包括选择检校场、设计航线、申请空域和布设地面基准站。
2、申请空域在任何一个航摄任务执行前要按照规定向有关部门提出空域取得航飞权的申请。
在航飞权期间挑选最好的天气飞行,这样可以使拍摄影像的质量得到保证。
3、航线设计在对航飞路线设计时,要遵循经济、周密、安全和高效的原则,选则专门的航飞设计软件来对飞行路线进行设计。
通常在航线设计时,要参考小比例尺的二维平面地形图,综合的进行测区的地貌、地形、机载激光雷达设备的参数(扫描角、相机镜头焦距、扫描频率等)天气条件(雾、云、烟尘、降雨等等)航带重叠度、航带宽度和用户要求的点云密度考虑,设计出符合项目精度要求的航线。
激光雷达点云一、激光雷达激光雷达(LIDAR)是一种主动式光学传感器,通过发射激光光束并测量其返回时间和光的特性来获取环境中物体的距离和形状信息。
它广泛应用于自动驾驶、三维建模、环境感知以及机器人导航等领域。
二、激光雷达工作原理激光雷达通过发射激光束并接收其返回的光信号来获取环境中物体的三维位置信息。
它的工作原理可以分为三个主要步骤:2.1 发射激光束激光雷达会发射一束激光光束,通常采用红外激光,具有较高的能量和方向性。
发射的激光束经过透镜或其他光学元件进行调制和聚焦,形成一个细小而密集的光点。
2.2 接收返回信号激光束经过调制和聚焦后,会照射在环境中的物体上,部分光线会被物体反射或散射。
激光雷达利用接收器接收和记录返回的光信号,包括时间信息和光的强度。
接收到的信号将被处理和分析,以获取物体与激光雷达的距离。
2.3 三维重建通过计算激光光束的发射和接收时间差,结合光的传播速度,可以确定物体与激光雷达的距离。
通过将激光雷达的位置和方向信息结合距离信息,可以重建出环境中物体的三维位置坐标。
这些位置坐标以点云的形式表示,即激光雷达点云。
三、激光雷达点云激光雷达点云是由激光雷达获取到的一组离散的三维点的集合。
每个点都包含了空间中的位置信息和反射强度信息,用于描述环境中物体的几何形状和相对位置关系。
3.1 点云数据格式激光雷达点云数据可以采用多种格式进行存储和传输,常见的格式有ASCII、二进制和压缩格式等。
其中,ASCII格式以可读性而闻名,每个点的坐标和属性都以文本形式表示,方便数据处理和分析。
而二进制格式则更加紧凑,适合于大规模数据的存储和传输。
压缩格式则可以进一步减小数据的存储和传输量。
3.2 点云数据处理激光雷达点云数据处理是将原始的点云数据进行滤波、分割、配准等操作,提取中所需的特征和信息。
常见的点云数据处理任务包括点云去噪、平滑、分割不同物体、地面提取和配准等。
3.2.1 点云去噪在激光雷达测量过程中,受到环境干扰等因素的影响,可能会产生噪点和离群点。