自抗扰控制介绍
- 格式:ppt
- 大小:422.00 KB
- 文档页数:52
自抗扰算法(ADRC )介绍报告自抗扰控制器自PID 控制器演变过来,采取了PID 误差反馈控制的核心理念。
传统PID 控制直接引取输出于参考输入做差作为控制信号,导致出现响应快速性与超调性的矛盾出现。
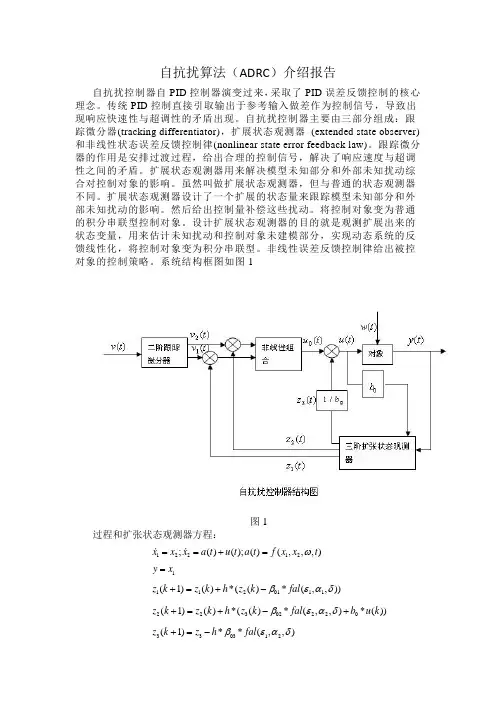
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。
扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。
虽然叫做扩展状态观测器,但与普通的状态观测器不同。
扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。
然后给出控制量补偿这些扰动。
将控制对象变为普通的积分串联型控制对象。
设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。
非线性误差反馈控制律给出被控对象的控制策略。
系统结构框图如图1图1过程和扩张状态观测器方程:1y x =22302220(1)()*(()*(,,)*())z k z k h z k fal b u k βεαδ+=+-+1120111(1)()*(()*(,,))z k z k h z k fal βεαδ+=+-12212;()();()(,,,)x x x a t u t a t f x x t ω==+=330312(1)**(,,)z k z h fal βεαδ+=-非线性控制策略方程:二阶微分控制器:112(1)()*()v k v k h v k +=+2212(1)()*(()(),(),,)v k v k h fhan v k v k v k r h +=+-其中,h 为积分步长,r 为跟踪算子。
自抗扰控制器参数整定方法的研究自抗扰控制器(Active Disturbance Rejection Controller,ADRC)是一种具有鲁棒性的控制方法,它在各个领域得到了广泛的应用。
然而,自抗扰控制器的性能很大程度上取决于参数的整定。
因此,研究自抗扰控制器参数整定方法具有重要的实际意义。
自抗扰控制器参数整定方法的研究发展迅速,现有的研究主要集中在理论分析和实验设计两个方面。
在理论分析方面,研究者们主要从扰动的估计和控制器设计两个方面展开研究。
在实验设计方面,则主要控制器的实现及其对不同系统的应用。
然而,现有的研究还存在一些问题,如参数整定缺乏系统性,实验验证不够充分等。
本文从理论分析和实验设计两个方面研究自抗扰控制器参数整定方法。
基于自抗扰控制器的原理,建立系统的数学模型。
然后,采用遗传算法对控制器参数进行全局搜索和优化,以实现最佳控制效果。
通过实验验证所提出方法的可行性和优越性。
通过实验验证了所提出方法的可行性和优越性。
实验结果表明,本文所提出的参数整定方法能够有效提高自抗扰控制器的性能,减小系统的稳态误差和超调量。
同时,对比实验也证明了本文所提出方法的有效性。
本文研究了自抗扰控制器参数整定方法,提出了一种基于遗传算法的全局优化方法。
通过理论分析和实验验证,证明了所提出方法的有效性和优越性。
然而,本文的研究仍存在一些不足之处,如未考虑非线性系统、控制器的优化算法还有待进一步改进等。
未来的研究方向可以包括拓展该方法在复杂系统和非线性系统中的应用,优化控制器的设计以及发展更加智能化的优化算法。
在复杂工业生产过程中,系统的干扰和不确定性常常成为制约控制系统性能的主要因素。
为了提高系统的抗干扰能力和鲁棒性,自抗扰控制(Active Disturbance Rejection Control,ADRC)方法应运而生。
同时,为了使控制系统达到最佳性能,对控制器参数进行合理整定也显得尤为重要。
本文将围绕自抗扰控制及控制器参数整定方法展开研究,旨在提高控制系统的性能并优化参数整定方法。
自抗扰控制器参数整定方法及其在热工过程中的应用共3篇自抗扰控制器参数整定方法及其在热工过程中的应用1自抗扰控制器参数整定方法及其在热工过程中的应用在热工过程中,控制系统的稳定性和效率是非常重要的。
为了保证热能系统的运行稳定、安全和高效,我们需要使用一种有效的控制方法。
自抗扰控制器(active disturbance rejection controller,ADRC)是一种新型的控制器,它是由中国科学家郑裕彤于1998年提出的一种基于扰动观测器的控制策略。
ADRC相比于传统PID控制器具有更好的控制性能。
它能够有效地抵消扰动对于系统的影响,并且具有较强的干扰抑制能力、响应速度较快、参数调节简单等优点。
因此,在工业生产领域,ADRC得到了广泛的应用。
对于ADRC的参数调节,在实际应用中比较关键。
目前,研究者们提出了许多方法来进行ADRC的参数整定。
这里介绍一种基于模糊控制的ADRC参数整定方法。
该方法采用模糊控制的思想,将ADRC的三个参数Kp、γ和h放入模糊控制器中,进行整定。
模糊控制器通过模糊规则库,将输入变量与输出变量进行模糊化,并根据模糊化后的变量计算出相应的控制增益。
通过这种方法,可以快速地获得较优的控制参数,进而提高系统的控制性能。
在热工过程中,ADRC应用广泛。
例如,在锅炉控制领域中,ADRC可以通过对加热器温度进行控制,控制锅炉内的热水温度,实现锅炉运行的稳定和高效。
此外,ADRC还可以用于控制热力发电机组中的蒸汽流量,保证汽轮机的运行稳定和高效。
同时,ADRC也可以应用于化工厂中的反应釜、蒸馏塔等设备,实现反应过程的控制。
总之,ADRC是一种非常有效的控制方法,在热工过程中的应用前景广阔。
通过合适的参数整定方法,可以使ADRC更好的发挥其控制优势,在生产实践中实现控制自动化、稳定性和高效性综上所述,ADRC是一种高效、稳定、灵活的控制方法,广泛应用于热工过程中。
其优点包括对多种扰动的抗干扰能力以及响应速度较快等。


专家自抗扰控制器的设计与仿真
摘要: 自抗扰控制器(ADRC)不依赖于被控对象精确的数学模型,具有控制算法简单、鲁棒性强、抗干扰能力强等优点,引起控制专家和学者广泛关注;但是自抗扰控制器在实际应用中多个参数需要整定,参数自整定不像PID 控制器那么容易。
本文设计了一种用于控制不确定对象的专家自抗扰控制器;控制器参数自整定阶段,专家系统推理机通过对被控对象近似模型分析,从知识库中的十套自抗扰参数中选择出最佳的一套;并将这套参数嵌入到基于自抗扰技术的控制系统中,实现对不确定对象的控制。
仿真表明:所设计的控制器具有抗干扰能力强、适应性强的特点,特别是对于大时滞、大惯性的对象具有良好的控制效果。
关键词:专家自抗扰控制器;不确定对象;专家系统;十套自抗扰参数
基于扩张状态观测器的自抗扰控制技术是近年来提出的一种简单实用的综合控[1]制方法,由这种方法所构建的自抗扰控制器不依赖于被控对象精确的数学模型,具有控制算法简单、鲁棒性强、系统响应快、抗干扰能力强等优点,已经引起国内外控制工[2-4]程界专家学者的广泛关注和高度好评。
详细内容请点击:专家自抗扰控制器的设计与仿真。
《自抗扰控制器研究及其应用》篇一一、引言自抗扰控制器(Active Disturbance Rejection Control,简称ADRC)是一种先进的控制策略,广泛应用于各种复杂系统的控制问题中。
其核心思想是通过实时调整系统参数,对外部扰动进行抑制和抗扰,提高系统的稳定性和性能。
本文将对自抗扰控制器的原理、算法及在各个领域的应用进行深入的研究和探讨。
二、自抗扰控制器的原理及算法自抗扰控制器主要基于非线性控制理论,其基本原理是通过实时测量系统的状态,计算出期望的输出,再通过反馈控制来调整系统的行为。
具体算法包括跟踪微分器、非线性状态误差反馈和动态扩展状态空间等方法。
跟踪微分器用于估计系统状态的导数,提高系统的响应速度和稳定性。
非线性状态误差反馈则根据系统误差,通过非线性函数计算出控制量,以实现对外部扰动的抗扰。
动态扩展状态空间则通过引入扰动观测器,实时估计系统受到的外部扰动,以便更好地调整控制策略。
三、自抗扰控制器在各领域的应用1. 工业控制领域:自抗扰控制器在工业控制领域具有广泛的应用,如化工、冶金、电力等行业的生产过程控制。
在这些领域中,系统常常受到各种外部扰动的影响,如温度、压力、流量等参数的波动。
自抗扰控制器能够有效地抑制这些扰动,提高系统的稳定性和性能。
2. 航空航天领域:自抗扰控制器在航空航天领域也得到了广泛的应用。
例如,在飞行器的姿态控制、导航和制导等方面,自抗扰控制器能够有效地抵抗风切变、大气扰动等外部干扰,保证飞行器的稳定性和安全性。
3. 机器人领域:自抗扰控制器在机器人领域也具有广泛的应用前景。
在机器人运动控制、路径规划等方面,自抗扰控制器能够有效地抵抗环境中的不确定性和扰动,提高机器人的运动性能和稳定性。
四、自抗扰控制器的优势与挑战自抗扰控制器具有以下优势:1. 抗干扰能力强:自抗扰控制器能够实时估计并抑制系统受到的外部扰动,提高系统的稳定性和性能。
2. 鲁棒性强:自抗扰控制器对系统模型的不确定性和非线性具有较好的鲁棒性,能够适应各种复杂的环境和工况。