基于MPU6050的INS惯性导航和实时姿态检测系统
- 格式:docx
- 大小:2.61 MB
- 文档页数:46

惯性导航难懂?看懂只需这一篇!全面解读惯性导航系统与技术惯性导航系统(INS,Inertial Navigation System)是一种利用惯性敏感器件、基准方向及最初的位置信息来确定运载体在惯性空间中的位置、方向和速度的自主式导航系统,也简称为惯导。
惯性导航技术的发展历程第一代惯性导航技术指1930 年以前的惯性技术,奠定了整个惯性导航发展的基础。
牛顿三大定律成为惯性导航的理论。
第二代惯性技术开始于上世纪 40 年代火箭发展的初期,其研究内容从惯性仪表技术发展扩大到惯性导航系统的应用。
70 年代初期,第三代惯性技术发展阶段出现了一些新型陀螺、加速度计和相应的惯性导航系统,其研究目标是进一步提高INS 的性能,并通过多种技术途径来推广和应用惯性技术。
当前,惯性技术正处于第四代发展阶段,其目标是实现高精度、高可靠性、低成本、小型化、数字化、应用领域更加广泛的导航系统。
比如随着量子传感技术的迅速发展,在惯性导航技术中,利用原子磁共振特性构造的微小型核磁共振陀螺惯性测量装置具有高精度、小体积、纯固态、对加速度不敏感等优势,成为新一代陀螺仪的研究热点方向之一。
惯性导航的组成惯性导航包括惯性测量单元(Inertial Measurement Unit,简称IMU)和计算单元两大部分。
通过IMU感知物体方向、姿态等变化信息,再经过各种转换、补偿计算得到更准确的信息。
比如检测物体的初始位置、初始朝向、初始姿态以及接下来每一刻朝向、角度的改变,然后把这些信息加一起不停地推,推算出物体现在的朝向和位置。
IMU主要由加速度计和陀螺仪组成,可实时检测物体的重心方向、俯仰角、偏航角等信息,如果还加上电子罗盘和气压计等传感器,那IMU的测量信息量与精度也相应地能得到一定的提高。
而计算单元则主要由姿态解算单元,积分单元和误差补偿单元这三部分组成。
惯性导航的工作原理惯性导航的目的是实现自主式导航,即不依赖外界信息,包括卫星信号、北极指引等。
基于MPU6O5O和步进电机的高精度转动控制方法随着科技的不断发展与人类社会的进步,姿态检测系统在人工智能、车辆船舶、航空航天等领域越来越多地被运用,姿态数据成为其中最重要的参数之一。
*****由于其体积小巧,功能强大,精度较高, 得以被广泛应用。
同时,两相混合式步进电机由于结构简单,运行可靠性高,驱动器成本低等的特点,仍广泛应用于工业和自动化领域。
本文的目的在于将*好好姿态传感器和步进电机相结合,设计一种高精度的转动控制方法,实现在动态环境中完成目标的快速稳定和定位。
通过搭建一个以自由摆运动为模型的目标平衡定位系统,以”林07ZGT6为控制核心,利用*灼传感器采集摆杆和控制目标的姿态数据,步进电机执行控制信号,构成闭环控制系统,验证了基于初好和步进电机的转动控制方法具有精度高、响应快的特征。
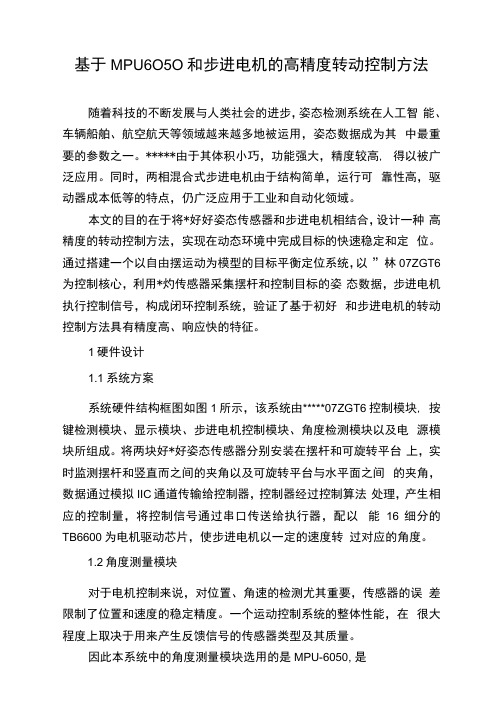
1硬件设计1.1系统方案系统硬件结构框图如图1所示,该系统由*****07ZGT6控制模块, 按键检测模块、显示模块、步进电机控制模块、角度检测模块以及电源模块所组成。
将两块好*好姿态传感器分别安装在摆杆和可旋转平台上,实时监测摆杆和竖直而之间的夹角以及可旋转平台与水平面之间的夹角,数据通过模拟IIC通道传输给控制器,控制器经过控制算法处理,产生相应的控制量,将控制信号通过串口传送给执行器,配以能16细分的TB6600为电机驱动芯片,使步进电机以一定的速度转过对应的角度。
1.2角度测量模块对于电机控制来说,对位置、角速的检测尤其重要,传感器的误差限制了位置和速度的稳定精度。
一个运动控制系统的整体性能,在很大程度上取决于用来产生反馈信号的传感器类型及其质量。
因此本系统中的角度测量模块选用的是MPU-6050, 是InvenSense公司的一款高性能三轴加速度十三轴陀螺仪的姿态传感器芯片。
该处理器的角速度感测范围为±250、±500、±2000与±2000%, 加速度感测范围为±2g、±4g、±8g与±26g,感测范围可通过编程来控制。
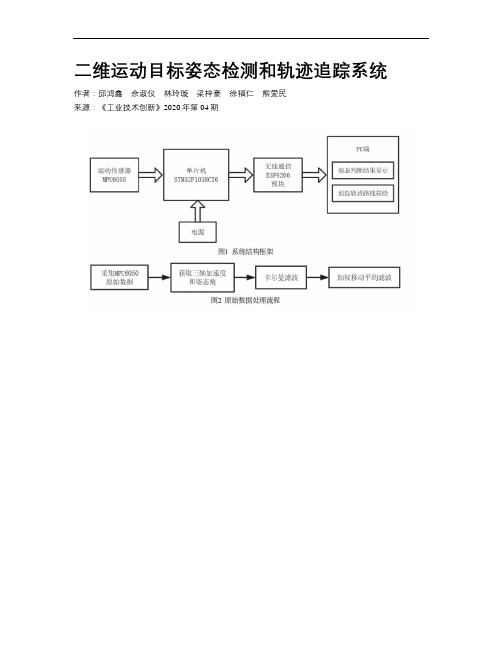
二维运动目标姿态检测和轨迹追踪系统作者:邱鸿鑫佘淑仪林玲璇梁梓豪徐福仁熊爱民来源:《工业技术创新》2020年第04期摘 ; 要:传统运动目标定位系统存在可移动性差、实时性受限、对目标姿态检测不适用等缺陷。
提出一种基于六轴传感器MPU6050的二维运动目标姿态检测和轨迹追踪系统。
系统采用MPU6050传感器获取目标运动数据,将数据传送到STM32F103RCT6主控芯片进行处理;利用无线通信模块将数据处理结果传输至PC端;在PC端实时显示目标的运动姿态和运动轨迹。
通过静止、加速、转弯等运动对系统进行测试,总体路线偏差控制在6.25%以内,达到了设计要求。
可以在汽车行驶状态判断、车载GPS盲区导航、室内机器人定位等领域推广使用。
关键词:姿态检测;轨迹追踪;MPU6050;STM32F103RCT6;无线通信中图分类号:TP37 ; ;文献标识码:A ; ;文章编号:2095-8412 (2020) 04-063-06工业技术创新 URL: http:// ; ;DOI: 10.14103/j.issn.2095-8412.2020.04.012引言为了检测运动目标的姿态和轨迹,进而判断运动目标是否按照预定模式正常工作,已经开发了各种定位技术和定位系统。
传统的室内外定位系统具有较高的测量精度,但它们往往对使用环境有特定要求,也存在目标定位受外界参考系限定、测量量程受基准参考系制约、对目标姿态检测不适用等缺陷[1]。
张秀再等[2]提出了利用惯性元件进行轨迹追踪的系统,其利用串口通信将数据传输到PC 端,这种有线传输的方式在测试和实际使用中存在可移动性差等缺点,会受到一定限制。
无线通信可移动性好,但在GPS信号不佳的环境下会受到实时性的限制[3]。
为了解决上述问题,本文设计一种基于六轴传感器MPU6050的二维运动目标姿态检测和轨迹追踪系统。
系统通过MPU6050传感器获取运动目标的加速度、姿态角等参数,进行数据处理,进而将处理结果无线传输至PC端;PC端将实时显示目标的运动姿态并描绘其运动轨迹,具有设计简单、准确率高、实时性强等优点,可以在室内环境及GPS信号不好的环境下实现运动物体的检测、定位和追踪。

基于STM32和MPU6050姿态解算的研究与实现李臣龙;强俊【摘要】使用MPU6050内置的DMP,实现了载体的姿态解算,不仅简化代码设计,而且降低了MCU的负担,MCU不用进行姿态解算过程,从而有更多的时间去处理其他事件,提高系统实时性.通过设计的硬件平台,软件仿真了三轴陀螺仪、三轴加速度和欧拉角实时变化,结果表明,姿态解算稳定可靠.【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2017(035)002【总页数】5页(P295-298,316)【关键词】STM32;MPU6050;四元数;姿态解算【作者】李臣龙;强俊【作者单位】安徽工程大学计算机与信息学院,安徽芜湖241000;安徽工程大学计算机与信息学院,安徽芜湖241000【正文语种】中文【中图分类】V241.02载体的姿态解算广泛应用于航空航天、工业机器人等热门领域,是惯性导航系统的关键技术[1]。
姿态解算的基本方法是利用滤波后的陀螺仪、加速度计等数据,实时解算出飞行器俯仰角、滚转角和偏航角。
陀螺仪用于测量载体的角速度值,通过对角速度进行积分,从而得到载体的旋转角度。
但随着积分时间的推移,其积分误差也将逐渐增大,使得计算的角度与实际角度产生误差[2]。
加速度计也叫重力感应器,可以感知任意方向上的加速度(重力加速度则只是地表垂直方向加速度),加速计通过测量组件在某个轴向的受力情况来得到结果,表现形式为轴向的加速度大小和方向(XYZ)。
在无外力的加速的情况下,能够准确输出俯仰角和滚转角,并且角度没有累积误差。
但是载体变速运动时,加速度传感器同样会检测变速运动的加速度,从而导致姿态角的解算有误差。
因此,单一传感器很难准确检测载体三个姿态角信息,为了能够准确的解算出载体的姿态信息,需要融合处理多种传感器的数据,达到优势互补。
本文通过整合MPU6050内3轴陀螺仪和3轴加速度,对载体姿态进行解算,增强了解算的稳定性。
基于微处理器性能、功耗、可扩展想等方面的考虑,本系统采用STM32F407(ARM Cortex-M4内核)进行传感数据处理。

基于MPU-6050的步态信号采集系统谷丽华;崔畅;高松巍;许会【期刊名称】《沈阳工业大学学报》【年(卷),期】2015(037)002【摘要】针对目前获取步态信号类型比较单一,只采集三轴加速度信息,可供分析的信号来源较少,多传感器组合应用存在传感器之间的轴间差等问题,设计了一种基于数字运动处理器的无线步态采集系统.传感器选择集成三轴加速度和三轴陀螺仪信号的MPU-6050以获得更多的步态信息,确保了无轴间差校准问题.系统主要由微控制器STC90LE52、运动传感器MPU-6050以及无线通信模块RF1 100SE组成.由MPU-6050采集步态加速度和陀螺仪信号,STC90LE52读取数据并通过RF1 100SE发送,接收端将接收到的数据通过串口送到计算机中.通过对数据进行分析可知,在步态信号中,重力方向和前进方向的加速度信号周期性较好,而陀螺仪的俯仰角信号周期性优于其他两个轴的信号.【总页数】7页(P176-182)【作者】谷丽华;崔畅;高松巍;许会【作者单位】沈阳工业大学信息科学与工程学院,沈阳110870;沈阳化工大学信息工程学院,沈阳110142;沈阳工业大学信息科学与工程学院,沈阳110870;沈阳工业大学信息科学与工程学院,沈阳110870;沈阳工业大学信息科学与工程学院,沈阳110870【正文语种】中文【中图分类】TP212【相关文献】1.基于MPU-6050和UKF的姿态测量系统设计 [J], 陶子涵;高国伟;徐万芝2.基于MPU-6050及蓝牙技术的姿态检测系统设计 [J], 白礼卓;鲜鹏飞;尹雪;马勇3.基于MEMS的步态信号采集实验教学装置 [J], 陈东毅;陈建国;李玉榕;段小华4.基于MEMS加速度传感器MPU-6050的滑坡检测系统设计 [J], 王文鑫;姚璐;胥钧5.加速度传感器在步态信号采集系统中的应用 [J], 曹赟;周宇;徐寅林因版权原因,仅展示原文概要,查看原文内容请购买。

惯性导航系统中的误差补偿与姿态控制策略导航系统在现代航空、航天以及各种导航应用中起着至关重要的作用。
惯性导航系统(Inertial Navigation System,简称INS)是一种通过测量运动物体的加速度和角速度来确定其位置、速度和姿态的技术。
然而,由于硬件、测量误差以及环境因素的影响,INS系统往往存在着误差,这些误差会导致导航精度的下降,因此需要采取误差补偿与姿态控制策略来提高系统性能。
误差来源:首先,我们需要了解INS系统中可能出现的误差来源。
惯性测量单元(IMU)是INS的核心组件之一,由加速度计和陀螺仪组成,它们用于测量物体的加速度和角速度。
然而,IMU的制造和使用过程中会引入各种误差,如漂移误差、偏置误差和尺度因子误差等。
此外,INS系统在导航过程中还会受到温度变化、地球自转以及外部干扰等环境因素的影响。
所有这些误差都会对导航精度产生不利影响,因此需要在系统设计中考虑误差补偿与姿态控制策略。
误差补偿策略:为了提高INS系统的性能,各种误差补偿策略被应用在实际导航中。
其中最常用的误差补偿方法包括卡尔曼滤波、全局定位系统(GPS)融合、非线性优化算法等。
卡尔曼滤波是一种基于状态空间模型的估计方法,可用于估计导航中的位置、速度和姿态等参数。
它通过对测量值和系统模型进行加权平均,从而估计系统的状态并减小误差。
卡尔曼滤波算法在INS系统中广泛应用,因为它能够有效地处理噪声和不确定性,并提供滤波值的最优估计。
然而,卡尔曼滤波算法对系统动态模型的假设要求较高,因此在实际应用中需要对系统建模和参数估计进行精确分析。
GPS融合是另一种常用的误差补偿策略。
INS和GPS具有互补的特性,INS能够提供连续和精确的导航信息,而GPS可以提供绝对位置和速度。
通过将两者的信息融合,可以减小INS和GPS各自存在的误差,提高导航精度。
基于GPS融合的方法主要包括扩展卡尔曼滤波、粒子滤波和紧耦合融合等。
这些方法通过同时考虑INS和GPS的测量值和模型,从而减小误差并提高导航性能。
惯性导航仪的工作原理惯性导航仪(Inertial Navigation System,简称INS)是一种利用惯性力学原理来测定飞行器的位置、速度和姿态的装置。
其工作原理基于牛顿第一定律,物体内部的任何一个点在不受外力作用时都保持静止或匀速直线运动的特性。
加速度计是通过测量飞行器在惯性坐标系中的加速度来计算其位置和速度。
加速度计通常采用微机械加速度计(MEMS)传感器,其内部包含微小的挠性结构和敏感元件。
在飞行器加速度发生变化时,敏感元件将受到力的作用,使其挠曲或发生应变。
通过测量挠性结构的变化,可以得到飞行器的加速度。
陀螺仪是通过测量飞行器的角速度来计算其姿态和方向的。
陀螺仪通常采用光纤陀螺仪或微机械陀螺仪等传感器,其原理是基于角动量守恒定律。
当飞行器发生旋转时,陀螺仪内部的旋转部件会受到力的作用而发生角位移。
通过测量旋转部件的位移,可以计算出飞行器的角速度。
加速度计和陀螺仪测量到的数据会被输入到惯性导航仪的计算单元中进行处理。
计算单元会根据牛顿第一定律的原理,结合数学运算和积分求解,计算出飞行器的当前位置、速度和姿态信息。
具体计算过程包括速度积分、位置积分和姿态积分等。
通过不断地积分和计算,惯性导航仪可以提供实时的位置、速度和姿态更新。
然而,由于加速度计和陀螺仪的测量都存在误差,这些误差会随着时间的推移而积累,并导致惯性导航仪的输出结果与真实的位置、速度和姿态有所偏差。
为了解决这个问题,惯性导航仪通常会与其他定位系统(如全球定位系统、地面雷达等)进行融合,利用外部测量数据来校准和修正惯性导航仪的误差,从而提高导航的准确性和精度。
总结起来,惯性导航仪的工作原理是基于加速度计和陀螺仪的测量数据,在计算单元的处理下,通过积分和运算求解飞行器的位置、速度和姿态信息。
虽然惯性导航仪具有自主性和实时性等优点,但其误差积累和精度问题需要通过融合其他定位系统的方式得到解决。
惯性导航仪的工作原理惯性导航仪(Inertial Navigation System,简称INS)是一种基于惯性测量单元(Inertial Measurement Unit,简称IMU)的导航系统,它能够通过测量物体的加速度和角速度来计算物体的位置、速度和姿态。
惯性导航仪广泛应用于航空航天、船舶、汽车等领域,具有高精度、高可靠性和抗干扰能力强的特点。
惯性导航仪的工作原理可以分为两个主要步骤:测量和计算。
1. 测量惯性导航仪通过惯性测量单元(IMU)来测量物体的加速度和角速度。
IMU通常由加速度计和陀螺仪组成。
- 加速度计(Accelerometer):加速度计用于测量物体在三个轴向上的加速度。
它基于牛顿第二定律,通过测量物体所受的惯性力来计算加速度。
加速度计常用的工作原理有压电效应、电容效应和微机械系统(MEMS)等。
- 陀螺仪(Gyroscope):陀螺仪用于测量物体绕三个轴向的角速度。
它基于角动量守恒定律,通过测量物体的转动力矩来计算角速度。
陀螺仪常用的工作原理有旋转式陀螺仪、光纤陀螺仪和微机械系统(MEMS)等。
2. 计算惯性导航仪通过对测量数据的处理和计算,来推导出物体的位置、速度和姿态等导航信息。
计算过程主要包括积分和滤波两个步骤。
- 积分:惯性导航仪通过对加速度和角速度的积分来计算物体的速度和位移。
加速度积分可以得到速度,速度积分可以得到位移。
但是由于积分过程中存在误差累积的问题,导航系统需要进行误差校正和补偿。
- 滤波:为了减小误差累积的影响,惯性导航仪通常采用滤波算法对测量数据进行优化处理。
常用的滤波算法有卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。
滤波算法可以根据测量数据和模型来估计物体的真实状态,并提供更准确的导航信息。
除了测量和计算,惯性导航仪还需要进行初始对准和校准等步骤,以提高导航系统的精度和稳定性。
总结起来,惯性导航仪的工作原理是通过测量物体的加速度和角速度,然后通过积分和滤波等计算方法,推导出物体的位置、速度和姿态等导航信息。
基于MPU6050和HMC5883L的猪的姿态检测
李哲;田建艳;郑晟;王芳;张小龙
【期刊名称】《江苏农业科学》
【年(卷),期】2016(0)2
【摘要】以猪为例,通过分析猪的常见姿态,依据不同姿态角度特点提出分类方法,并使用加速度与陀螺仪传感器集成芯片MPU6050与地磁传感器HMC5883L 设计一套姿态检测系统,以满足畜禽养殖业对自动检测畜禽行为的需要。
试验结果证明,该系统能够准确检测出猪的相应姿态,可为后续分析猪行为提供依据。
【总页数】4页(P434-436,437)
【作者】李哲;田建艳;郑晟;王芳;张小龙
【作者单位】太原理工大学信息工程学院,山西太原030024;太原理工大学信息工程学院,山西太原030024;太原理工大学信息工程学院,山西太原030024;太原理工大学信息工程学院,山西太原030024;太原理工大学信息工程学院,山西太原030024
【正文语种】中文
【中图分类】TP274;TP212.9
【相关文献】
1.基于MPU6050的四轴飞行器姿态角解算
2.基于MPU6050的四轴飞行器姿态角解算
3.基于MPU6050的轮式机器人姿态检测系统设计
4.基于MPU6050的人
体姿态检测家电控制系统设计5.基于MPU6050六轴传感器的平衡车姿态检测及控制方案
因版权原因,仅展示原文概要,查看原文内容请购买。
基于MPU6050的INS惯性导航和实时姿态检测系统 1. 项目目标及功能说明 1.1 项目目标 学习使用正点原子探索者开发板,并熟悉开发板上的MPU6050六轴传感器的工作原理和各函数的调用过程。同时学习开发板的扩展接口,尝试在开发板上扩展蓝牙模块,并实现开发板与手机等含有蓝牙模块的电子设备通过蓝牙连接并进行数据的传输。在完成上述内容的基础上,实现将MPU6050六轴传感器的加速度计和陀螺仪的数据传送到手机上,在手机上实现陀螺仪的变化效果展示。同时通过串口将MPU6050数据传送到电脑上,通过Matlab编程处理数据,实现惯性导航的简单展示。
1.2 系统功能说明 系统最主要的功能有两个:一个是在手机端能够展示开发板上MPU6050陀螺仪的姿态变化,通过一个立方体的转动来表示陀螺仪的转动;另一个是在电脑端能够读取MPU6050的数据,并通过对数据的处理还原数据中存储的MPU6050的姿态变化,简单展现出惯性导航的效果。
在实现系统最主要的两个功能过程中,还需要实现一些基础功能。开发板能够通过蓝牙与手机连接并传输数据;开发板能够通过串口将数据发送出去;在电脑端能够读取开发板上串口输出的数据等。 2. 需求分析 惯性导航系统用于各种运动机具中,包括飞机、潜艇、航天飞机等运输工具及导弹,然而成本及复杂性限制了其可以应用的场合。但是,存在一种情形:
卫星一旦突然因故障、敌方打击或干扰(如太阳风暴)等原因无法提供服务,这对依赖GPS、北斗等卫星导航系统作为唯一PNT(Position、Navigation、Time)信息来源的系统来说可能是致命的灾难。
作为目前为止卫星导航系统最好的备援——惯性导航系统(INS),将于届时发挥出巨大的作用,其精度完全可以媲美GPS等卫星导航系统。并且它不需要外部参考就可确定当前位置、方向及速度,从而使它自然地不受外界的干扰和欺骗。
定位、导航和授时服务对军队而言就像氧气对人类一样不可或缺,因此通过研究新机理、研制新设备、开发新算法,以摆脱人员和系统设备对GPS的依赖,具有极大的战略意义。
姿态监测系统可广泛应用于关键资产姿态变化的无线实时监控。由于目前移动智能终端设备的数量和质量逐步提升,因此,通过计算机上传统的上位机软件进行姿态监测,逐渐暴露出了自身的缺点——串口传输无法实现无线监测、计算机相比智能终端便携性极差。
因此,使用无线传输(蓝牙、红外、WIFI、GSM等)的技术,开发一款在移动智能终端可以实时显示物体姿态的应用,具有很高的实用价值和广泛的市场应用前景。 3. 开发环境 移动终端操作系统: Android 4.4.4 KitKat 计算机操作系统: Windows 8.1 Pro x64 串口开发: MATLAB R2014a 开发板IDE: Keil uVision5 Android IDE: Eclipse Java EE IDE for Web Developers Android Development Toolkit 23.0. 4.1468518 4. 项目进展情况 到目前为止,我组已实现了以下功能: 1. STM32F4开发板上MPU6050六轴传感器的数据获取并显示在LCD屏幕上。
2. 在LCD屏幕上绘出圆形图案,且圆形图案能根据MPU6050六轴传感器的姿态变化而运动,传感器倾斜角度越大,图案运动速度越快。
3. 扩展蓝牙模块,能通过蓝牙模块与手机连接并进行数据通信。 4. 根据函数提供的帧格式定义数据帧,并通过USART接口将数据帧传给PC端。
5. 在手机端能根据蓝牙获取的MPU6050六轴传感器的陀螺仪数据绘出立方体,立方体能在可接受的时间延迟内实时展现MPU6050的姿态变化(转动方向和角度)。
6. 在PC端能通过对从USART接口获取的数据帧进行解析获取MPU6050加速度传感器和陀螺仪的数据,并根据数据帧中设置的校验位进行数据校验。
7. 在PC端能根据解析出的加速度传感器和陀螺仪数据,在可接受的误差范围内还原MPU6050的姿态变化(包括位移、转动方向和角度),实现一个简单的惯性导航系统。 5. 系统设计 5.1 IIC总线工作原理 5.1.1 总线的构成及信号类型 I2C总线是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。在CPU与被控IC之间、IC与IC之间进行双向传送,最高传送速率100kbps。各种被控制电路均并联在这条总线上,但就像电话机一样只有拨通各自的号码才能工作,所以每个电路和模块都有唯一的地址,在信息的传输过程中,I2C总线上并接的每一模块电路既是主控器(或被控器),又是发送器(或接收器),这取决于它所要完成的功能。CPU发出的控制信号分为地址码和控制量两部分,地址码用来选址,即接通需要控制的电路,确定控制的种类;控制量决定该调整的类别(如对比度、亮度等)及需要调整的量。这样,各控制电路虽然挂在同一条总线上,却彼此独立,互不相关。
I2C总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。 结束信号:SCL为低电平时,SDA由低电平向高电平跳变,结束传送数据。 应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC发出特定的低电平脉冲,表示已收到数据。CPU向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU接收到应答信号后,根据实际情况做出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
这些信号中,开始信号是必须的,结束信号和应答信号都可以不要,IIC总线时序图如图 5.1.1-1所示。
图5.1-1IIC总线时序图 探索者STM32F4开发板板载的EEPROM芯片型号为24C02。该芯片的总容量为256字节,通过IIC总线与外部连接。STM32F4开发板有硬件IIC,但是设计的比较复杂,而且稳定性不好,所以我组使用GPIO软件模拟IIC来对24C02进行读写。同时使用软件更具有移植性,只要有IO口,将软件移植过去就能使用模拟的IIC,而硬件必须MCU的支持。 5.1.2 硬件设计 实现模拟IIC需要用到的硬件资源有:串口(USMART)、GPIO、24C02。
图5.1-2STM32F4与24C02连接图 我组通过GPIO来模拟IIC,24C2的SCL和SDA分别连在GPIO_PB8和GPIO_PB9上,连接关系如图 5.1.2-1。
5.2 MPU6050工作原理
5.2.1 MPU6050引脚
图5.2-1MPU6050结构图 模块外观如图 5.2.1-2所示: 图5.2-2MPU6050实物图 图5.2-3MPU6050内部逻辑框图 如图 5.2.1-1为MPU6050六轴传感器的结构图,总共有24个引脚,而图 5.2.1-2为MPU6050的内部逻辑框图,描述了MPU6050内部的模块结构,以及各引脚的连接情况。
表5.2.1-1MPU6050引脚输出和信号描述 Pin Number MPU-6050 Pin Name Pin Description 1 Y CLKIN Optional external referenceclock input.Connect to GND if unused. 6 Y AUX_DA I2Cmasterserialdata, forconnecting to external sensors 7 Y AUX_CL I2CMasterserialclock, forconnecting to external sensors 8 /CS SPI chipselect (0=SPI mode) 8 Y VLOGIC Digital I/O supplyvoltage 9 AD0 / SDO I2CSlaveAddress LSB (AD0); SPI serialdata output (SDO) 9 Y AD0 I2CSlaveAddress LSB (AD0) 10 Y REGOUT Regulatorfiltercapacitorconnection 11 Y FSYNC Frame synchronizationdigital input. Connectto GND ifunused. 12 Y INT Interruptdigital output (totempoleoropen-drain) 13 Y VDD Power supplyvoltageandDigital I/Osupply voltage 18 Y GND Power supplyground 19,21 Y RESV Reserved.Donot connect. 20 Y CPOUT Charge pump capacitorconnection 22 Y RESV Reserved.Donot connect. 23 SCL /SCLK I2Cserialclock (SCL); SPI serialclock (SCLK) 23 Y SCL I2Cserialclock (SCL) 24 SDA / SDI I2Cserialdata(SDA); SPIserial data input (SDI) 24 Y SDA I2Cserialdata(SDA) 2,3, 4, 5, 14, 15,16, 17 Y NC Notinternallyconnected. May beusedforPCB tracerouting.
表 5.2.1-1对每一个引脚的名称和作用进行了说明。在上述引脚中,SCL和SDA是连接MCU的IIC接口,MCU通过这个IIC接口来控制MPU6050。另外还有一个IIC接口,连接的引脚为AUX_CL和AUX_DA,这个接口可用来连接外部从设备,比如磁传感器,这样就可以与MPU6050组成一个九轴传感器。VLOGIC是IO口电压,该引脚最低可以到1.8V,我们一般直接VDD即可。AD0是从IIC接口(接MCU)的地址控制引脚,该引脚控制IIC地址的最低位,如果接GND,则MPU6050的IIC地址是0X68;如果接VDD,则是0X69。注意:这里的地址是不包含数据传输的最低位的(最低位用来表示读写)。
在探索者STM32F4开发板上,AD0是接GND的,即MPU6050的IIC地址是0X68(不含最低位)。