基于拓扑图电路理论的行星轮系运动学特性分析
- 格式:pdf
- 大小:24.06 KB
- 文档页数:4
行星轮参数对风电齿轮系统固有特性影响分析摘要:针对风电行星齿轮运动特点,通过分析系统构件受力情况,应用运动合成原理,建立了系统的动力学模型,并推导出系统的运动方程。
对系统内部激励和外部激励进行了分析,在此基础上研究了行星轮参数对MW 级风电齿轮系统固有特性的影响。
研究结果为风电齿轮可靠性稳健优化设计奠定了基础。
关键词:风电齿轮 固有特性 行星轮个数 0 引言风力发电机行星齿轮传动系统是风力发电机的关键部件,由于其所受的外部载荷具有时变特性,且工作环境在高空架设的机舱中,不便于实时监控及检测,因此准确地研究齿轮箱传动系统动力学特性变得越来越重要[1]。
本文针对MW 级风电齿轮系统采用行星齿轮传动系统,采用集中质量法建立了系统的运动微分方程,分析了行星轮参数对MW 级风电齿轮系统固有特性的影响规律,从而为后续风电齿轮系统动态特性研究提供了参考。
1 动力学模型MW 级风电齿轮系统采用行星齿轮传动系统如图1所示。
r风图1 风电行星齿轮传动结构该行星齿轮传动内齿圈(r )固定,叶片通过输入轴带动行星架(c )转动,行星架带动3个行星轮转动,太阳轮(s )带动输出轴转动,从而带动发电机运转。
由于内齿轮固连在机架上,其径向支承刚度与轮齿啮合刚度的比值大于10,因此,分析时仅考虑各构件的扭转振[2],忽略阻尼的影响。
假设各个行星轮的物理参数和几何参数相同,应用集中参数法建立该行星机构的动力学模型,各行星轮均匀布置,图2 为其扭转振动模型。
图2 扭转振动模型图2中c u 是行星架沿圆周方向的扭转角位移,s u 是太阳轮沿圆周方向的扭转角位移,p u 行星轮沿圆周方向的角位移,sp k 太阳轮与行星轮之间的轮齿时变啮合刚度,rp k 内齿圈与行星轮之间的轮齿时变啮合刚度。
令 i θ和),,(p s c i r i = 分别标时行星轮系各旋转构件绕其回转中心的角度和基圆半径, c r 为各行星轮中心所在圆的半径,则图2中各构件的位移为 p s c i r u i i i ,,,==θ (1) 行星架等效转动惯量2c p c c r Nm I J += (2) 太阳轮、行星轮的等效转动惯量为22,p p p s s s r I J r I J == (3) 式(2,3)中 i I ,p s c i m i ,,,=分别表示各构件转动惯量和质量。
基于有限元法的行星齿轮传动系统的动力学分析一、引言行星齿轮传动作为一种重要的传动装置,在工程应用中具有广泛的应用。
其具有结构紧凑、承载能力高、传动效率高等优点,因此在航空航天、机械制造等领域被广泛使用。
然而,在实际应用过程中,行星齿轮传动系统常常面临着各种挑战,如振动、噪声、疲劳等问题。
因此,对于行星齿轮传动系统的动力学行为进行深入研究,对于提高其工作性能具有重要意义。
二、有限元法简介有限元法是一种常用的工程分析方法,可以用来研究结构的应力、变形、振动等问题。
其基本原理是将复杂的结构分割为有限的单元,通过求解各单元内的位移和应力,最终得到整个结构的行为。
有限元法能够较为准确地模拟和分析实际结构的动态响应,因此被广泛应用于行星齿轮传动系统的研究。
三、行星齿轮传动系统的结构及工作原理行星齿轮传动系统由太阳轮、行星轮、内齿轮和行星架等组成。
其中,太阳轮是输入轴,内齿轮为输出轴,行星轮通过行星架与太阳轮和内齿轮相连。
在行星齿轮传动系统中,太阳轮提供动力输入,通过行星轮的转动将动力传递给内齿轮,实现输出轴的运动。
四、行星齿轮传动系统的动力学模型建立1.建立行星齿轮传动系统的有限元模型为了研究行星齿轮传动系统的动力学行为,首先需要建立其准确的有限元模型。
通过考虑行星轮、齿轮、轴承等各个部件的刚度和质量等参数,可以建立行星齿轮传动系统的有限元模型。
2.确定边界条件和加载条件在进行有限元分析之前,需要确定边界条件和加载条件。
边界条件是指限定结构的位移和转角,在行星齿轮传动系统中,常常将太阳轮固定,将内齿轮的运动约束为指定的转速。
加载条件则是指施加在结构上的外部载荷,在行星齿轮传动系统中,可以考虑太阳轮的输入力作用于行星轮上。
五、行星齿轮传动系统的动力学分析1.求解结构的模态特性通过有限元方法可以求解行星齿轮传动系统的模态特性,即结构的固有频率和模态形态。
模态分析可以帮助工程师了解结构的振动特性,以及确定可能的共振问题。
行星齿轮机构运动规律原理及应用分析类型:转载来源:济民工贸的博客作者:齐兵责任编辑:李笛发布时间:2009年06月11日我们熟知的齿轮绝大部分都是转动轴线固定的齿轮。
例如机械式钟表、普通机械式变速箱、减速器,上面所有的齿轮尽管都在做转动,但是它们的转动中心(与圆心位置重合)往往通过轴承安装在机壳上,因此,它们的转动轴都是相对机壳固定的,因而也被称为"定轴齿轮"。
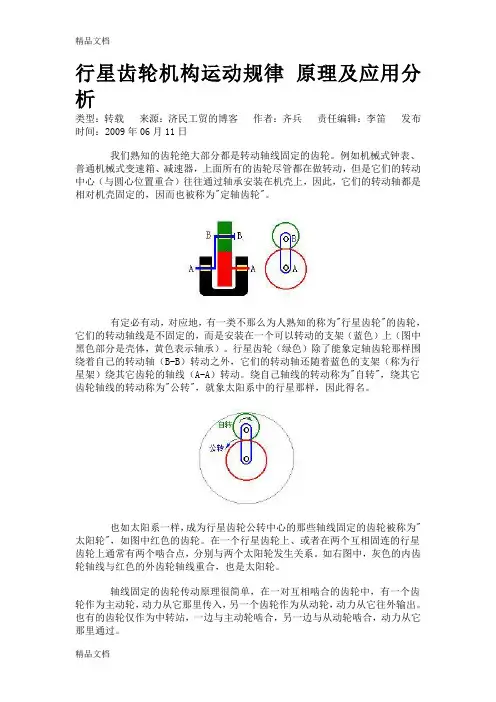
有定必有动,对应地,有一类不那么为人熟知的称为"行星齿轮"的齿轮,它们的转动轴线是不固定的,而是安装在一个可以转动的支架(蓝色)上(图中黑色部分是壳体,黄色表示轴承)。
行星齿轮(绿色)除了能象定轴齿轮那样围绕着自己的转动轴(B-B)转动之外,它们的转动轴还随着蓝色的支架(称为行星架)绕其它齿轮的轴线(A-A)转动。
绕自己轴线的转动称为"自转",绕其它齿轮轴线的转动称为"公转",就象太阳系中的行星那样,因此得名。
也如太阳系一样,成为行星齿轮公转中心的那些轴线固定的齿轮被称为"太阳轮",如图中红色的齿轮。
在一个行星齿轮上、或者在两个互相固连的行星齿轮上通常有两个啮合点,分别与两个太阳轮发生关系。
如右图中,灰色的内齿轮轴线与红色的外齿轮轴线重合,也是太阳轮。
轴线固定的齿轮传动原理很简单,在一对互相啮合的齿轮中,有一个齿轮作为主动轮,动力从它那里传入,另一个齿轮作为从动轮,动力从它往外输出。
也有的齿轮仅作为中转站,一边与主动轮啮合,另一边与从动轮啮合,动力从它那里通过。
在包含行星齿轮的齿轮系统中,情形就不同了。
由于存在行星架,也就是说,可以有三条转动轴允许动力输入/输出,还可以用离合器或制动器之类的手段,在需要的时候限制其中一条轴的转动,剩下两条轴进行传动,这样一来,互相啮合的齿轮之间的关系就可以有多种组合:单排行星齿轮机构的结构组成为例● (1)行星齿轮机构运动规律设太阳轮、齿圈和行星架的转速分别为n1、n2和n3,齿数分别为Z1、Z2、Z3;齿圈与太阳轮的齿数比为α。
行星轮系传动行星轮系传动是一种常见的传动方式,广泛应用于各种机械设备中。
它由太阳轮、行星轮、内齿轮和外齿轮组成,通过它们之间的相互啮合来传递动力和扭矩。
行星轮系传动的工作原理是利用行星轮的旋转来传递动力。
太阳轮位于行星轮系的中心,通过输入轴将动力传递给太阳轮。
太阳轮的运动驱动行星轮绕太阳轮旋转,行星轮上还有一个轮系内齿轮,内齿轮与行星轮同心安装在行星架上。
内齿轮与外齿轮啮合,外齿轮固定不动。
当太阳轮传递动力时,行星轮会绕太阳轮旋转,并且行星轮上的内齿轮也会与外齿轮啮合。
这样,太阳轮的运动通过行星轮传递给内齿轮,再经过外齿轮传递给输出轴。
由于内齿轮与外齿轮的传动比不同,所以输出轴的转速和扭矩可以根据需要进行调节。
行星轮系传动具有多种优点。
首先,它具有高传动比和高扭矩输出的特点。
由于行星轮系中太阳轮和行星轮的啮合点分布在多个行星轮上,因此行星轮系传动可以实现比其他传动更高的传动比。
此外,行星轮系传动还可以通过增加行星轮的数量来提高扭矩输出。
行星轮系传动具有结构紧凑、体积小的特点。
行星轮系中的各个元件都可以紧凑地安装在一起,占用空间相对较小。
这使得行星轮系传动在有限空间内的应用更加方便。
行星轮系传动还具有平稳运转和传动效率高的优点。
由于行星轮系中的多个齿轮共同传递动力,使得传动过程相对平稳,减小了振动和噪音。
同时,由于行星轮系中的齿轮啮合面积大,传动效率相对较高。
然而,行星轮系传动也存在一些局限性。
首先,由于行星轮系中的多个齿轮的运动状态和相互作用比较复杂,因此制造和安装的难度相对较大。
其次,行星轮系传动的零件数量较多,加工和维修成本较高。
总的来说,行星轮系传动是一种广泛应用的传动方式,具有高传动比、高扭矩输出、结构紧凑、运转平稳和传动效率高的特点。
它在各种机械设备中发挥着重要作用,包括工业机械、汽车传动、航天器和机器人等领域。
随着科技的不断发展,行星轮系传动在设计和制造方面也得到了不断的改进和完善,为各行业的发展提供了可靠的动力传递解决方案。
行星轮系公式原理推导行星轮系公式原理的推导主要基于行星轮系的工作原理和转速关系。
行星轮系主要由行星轮g、中心轮k 及行星架H组成。
其中,行星轮的个数通常为2~6个,但在计算传动比时,只考虑1个行星轮的转速,其余的行星轮计算时不用考虑,称为虚约束。
行星轮系可以分为简单行星轮系和复合行星轮系。
简单行星轮系由一个太阳轮、一个齿圈和一个行星架组成,行星架上均匀分布着若干个行星轮。
复合行星轮系则由多个简单行星轮系组成,它们共用一个行星架,且相互之间存在转速和转矩的传递。
在推导行星轮系公式时,首先需要确定各构件之间的转速关系。
对于简单行星轮系,设太阳轮转速为nS,齿圈转速为nR,行星架转速为nC,行星轮转速为ng,则有:ng = nS - (nC + nR) / 2这个公式可以通过行星轮系的转速特征方程推导得到。
转速特征方程为:(nS - nC) / (nR - nC) = -α其中,α为齿圈与太阳轮的齿数比或节圆半径比,也称为行星轮系的结构参数,大于1。
将转速特征方程变形,可以得到行星轮转速的表达式。
对于复合行星轮系,其转速关系更为复杂,但同样可以通过对各简单行星轮系的转速关系进行叠加和组合来得到。
在确定了各构件之间的转速关系后,可以进一步推导出行星轮系的传动比公式。
传动比是指输入转速与输出转速之间的比值,对于行星轮系来说,传动比通常表示为太阳轮转速与行星架转速或齿圈转速之间的比值。
需要注意的是,行星轮系公式原理的推导涉及到较多的机械原理和数学知识,需要具备一定的专业背景和数学基础才能进行深入理解和推导。
同时,在实际应用中,行星轮系的设计和分析还需要考虑诸多因素,如齿轮的强度、耐磨性、润滑条件等,以确保行星轮系的正常工作和可靠性。
行星轮系传动行星轮系传动是一种常见的传动装置,广泛应用于各种机械设备中。
它具有结构简单、传动比稳定、承载能力强等优点,在工业领域得到了广泛的应用。
行星轮系传动由太阳轮、行星轮和内齿圈组成。
太阳轮位于行星轮系的中心,内齿圈位于行星轮系的外部,而行星轮则位于太阳轮和内齿圈之间。
行星轮通过行星架与太阳轮和内齿圈连接,形成一个闭合的传动系统。
行星轮系传动的工作原理是通过太阳轮和行星轮的相互啮合,实现能量的传递和转换。
当太阳轮转动时,通过行星架使行星轮绕太阳轮旋转,同时行星轮也绕内齿圈旋转。
在行星轮系传动中,太阳轮是输入轴,内齿圈是输出轴,而行星轮则起到传递和调节传动比的作用。
行星轮系传动的传动比由行星轮的齿数决定。
当太阳轮固定不动时,行星轮绕太阳轮旋转一周,内齿圈则绕行星轮旋转一周。
因此,传动比可以通过行星轮的齿数与太阳轮的齿数之比来确定。
行星轮系传动具有传动比稳定的优点。
由于行星轮与行星架的支撑,行星轮的齿数与太阳轮和内齿圈的齿数之比保持不变,从而实现了稳定的传动比。
这使得行星轮系传动在需要精确传动比的场合,如机床、自动化设备等领域得到了广泛的应用。
行星轮系传动还具有承载能力强的特点。
由于行星轮系中的每个行星轮都能承受一部分传动负载,因此整个传动系统的承载能力相对较高。
这使得行星轮系传动在需要传递大扭矩的场合,如汽车变速器、船舶传动等领域得到了广泛的应用。
然而,行星轮系传动也存在一些不足之处。
首先,由于行星轮系传动中的行星轮与行星架的啮合,会产生一定的摩擦和间隙,从而影响传动效率。
其次,行星轮系传动的结构相对复杂,制造和维修成本较高。
此外,在某些特殊工况下,行星轮系传动可能产生噪音和振动,影响使用效果。
总的来说,行星轮系传动作为一种常见的传动装置,在工业领域发挥着重要的作用。
它具有结构简单、传动比稳定、承载能力强等优点,广泛应用于各种机械设备中。
虽然行星轮系传动存在一些不足之处,但随着科技的不断进步,相信这些问题也能得到有效解决,使行星轮系传动更好地满足工业生产的需求。
第6章轮系本章主要介绍轮系的分类和应用,轮系传动比的计算方法。
由单对齿轮组成的齿轮机构功能单一,不能满足工程上的复杂要求,故常采用若干对齿轮,组成轮系来完成传动要求。
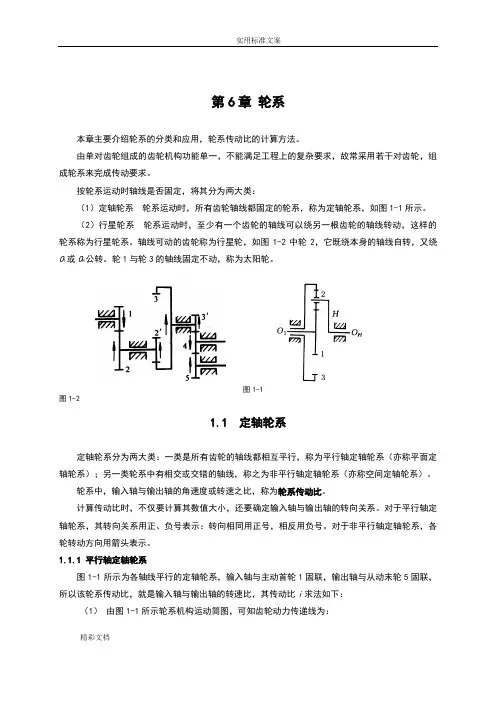
按轮系运动时轴线是否固定,将其分为两大类:(1)定轴轮系轮系运动时,所有齿轮轴线都固定的轮系,称为定轴轮系,如图1-1所示。
(2)行星轮系轮系运动时,至少有一个齿轮的轴线可以绕另一根齿轮的轴线转动,这样的轮系称为行星轮系。
轴线可动的齿轮称为行星轮,如图1-2中轮2,它既绕本身的轴线自转,又绕O1或O H公转。
轮1与轮3的轴线固定不动,称为太阳轮。
图1-1图1-21.1 定轴轮系定轴轮系分为两大类:一类是所有齿轮的轴线都相互平行,称为平行轴定轴轮系(亦称平面定轴轮系);另一类轮系中有相交或交错的轴线,称之为非平行轴定轴轮系(亦称空间定轴轮系)。
轮系中,输入轴与输出轴的角速度或转速之比,称为轮系传动比。
计算传动比时,不仅要计算其数值大小,还要确定输入轴与输出轴的转向关系。
对于平行轴定轴轮系,其转向关系用正、负号表示:转向相同用正号,相反用负号。
对于非平行轴定轴轮系,各轮转动方向用箭头表示。
1.1.1 平行轴定轴轮系图1-1所示为各轴线平行的定轴轮系,输入轴与主动首轮1固联,输出轴与从动末轮5固联,所以该轮系传动比,就是输入轴与输出轴的转速比,其传动比i求法如下:(1)由图1-1所示轮系机构运动简图,可知齿轮动力传递线为:(1—2)=(2′—3)=(3′—4)=(4—5)上式括号内是一对啮合齿轮,其中轮1、2′、3′、4为主动轮,2、3、4、5为从动轮;以 “—”所联两轮表示啮合,以“=”所联两轮同轴运转,它们的转速相等。
(2) 传动比i 的大小()4543321245342312354433221511i i i i z z z z z z z zn n n n n n n n n n i ⋅⋅⋅=⋅⋅⋅-=⋅⋅⋅==''''''上式表明,该定轴齿轮系的传动比等于各对啮合齿轮传动比的连乘积,也等于各对啮合齿轮中各从动轮齿数的连乘积与各主动轮齿数的连乘积之比,其正负号取决于轮系中外啮合齿轮的对数。