雷达成像识别的研究
- 格式:pdf
- 大小:260.71 KB
- 文档页数:4
现代信号处理技术在雷达数据处理中的应用研究雷达技术一直是军事、航空、航天等领域中不可或缺的重要技术之一。
其中最重要的一环就是雷达数据处理,它的分辨率、精度和反演效果,直接决定着雷达目标检测、跟踪、识别的能力以及雷达系统的整体性能。
近年来,随着信号处理技术的不断发展,现代信号处理技术已经成为了雷达数据处理中的重要手段,尤其是在雷达成像、信道估计等领域中,其应用实践效果显著。
一、现代信号处理技术的特点现代信号处理技术的特点是多学科交叉、信息量大、计算量大、时间复杂度高。
具体来说,它包括了数字信号处理、信息理论、通信原理、概率统计、数学优化等诸多学科技术。
在实际应用中,现代信号处理技术基于“数字化” 思想,将原本连续性的信号离散化,通过运用计算机数字计算和算法优化使得信号得以精密处理。
相较传统信号处理技术,现代信号处理技术具有处理方式灵活、可编程性强、处理效率高、系统稳定的优点。
二、现代信号处理技术在雷达数据处理中的应用1. 雷达成像雷达成像是指将雷达信号转化为图像的处理过程。
在现有的雷达定位模型下,通过操纵雷达探测器的方向和位置,获取整个区域的信号向量,进而生成一个雷达合成孔径雷达(SAR)图像。
然而在现代雷达技术中,成像的细节和清晰度常常受到各种不同因素的影响,比如天气、地形、目标合成等。
为了解决这些问题,现代信号处理技术如傅里叶变换、FFT、比例合成技术等已经广泛应用在雷达成像中,提高成像质量和图像效果。
其中,傅里叶变换是最基本的处理技术之一。
它可以将时间域波形转换成频率域表示,从而实现对信号的频谱分析,并通过卷积计算来增加图像的清晰度。
FFT 技术则是以类似的方式将连续正弦波和其他周期性信号转化成频谱数据,提高成像清晰度。
比例合成技术则是利用多个雷达传感器在不同位置同时对同一目标进行观测,并将得到的数据进行比例加权处理,使得成像效果更加准确。
2. 物体检测现代信号处理技术也可以应用在雷达目标检测中。
雷达目标识别技术1.引言雷达目标识别(RTR—Radar Target Recognition)是指利用雷达对单个目标或目标群进行探测,对所获取的信息进行分析,从而确定目标的种类、型号等属性的技术。
目前,经过国内外同行的不懈努力,应该说雷达目标识别技术已经在目标特征信号的分析和测量、雷达目标成像与特征抽取、特征空间变换、目标模式分类、目标识别算法的实现技术等众多领域都取得了不同程度的突破,雷达目标识别技术已成功应用于星载或机载合成孔径雷达地面侦察、毫米波雷达精确制导等方面。
但是,雷达目标识别技术还远未形成完整的理论体系,现有的雷达目标识别系统在功能上都存在一定程度的局限性,其主要原因是由于目标类型和雷达体制的多样化以及所处环境的极端复杂性。
本文讨论了目前理论研究和应用比较成功的几类雷达目标识别方法:基于目标运动的回波起伏和调制谱特性的目标识别方法、基于极点分布的目标识别方法、基于高分辨雷达成像的目标识别方法和基于极化特征的目标识别方法,同时讨论了问题的可能解决思路。
2. 雷达目标识别技术的回顾雷达目标识别的研究始于20世纪50年代,早期雷达目标特征信号的研究工作主要是研究目标的有效散射截面积。
但是,对形状不同、性质各异的各类目标,笼统用一个有效散射面积来描述,就显得过于粗糙,也难以实现有效识别。
几十年来,随着电磁散射理论的不断发展以及雷达技术的不断提高,在先进的现代信号处理技术条件下,许多可资识别的雷达目标特征信号相继被发现,从而建立起了相应的目标识别理论和技术。
雷达目标分类与识别已成为现代雷达的重要发展方向,也是未来雷达的基本功能之一。
目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。
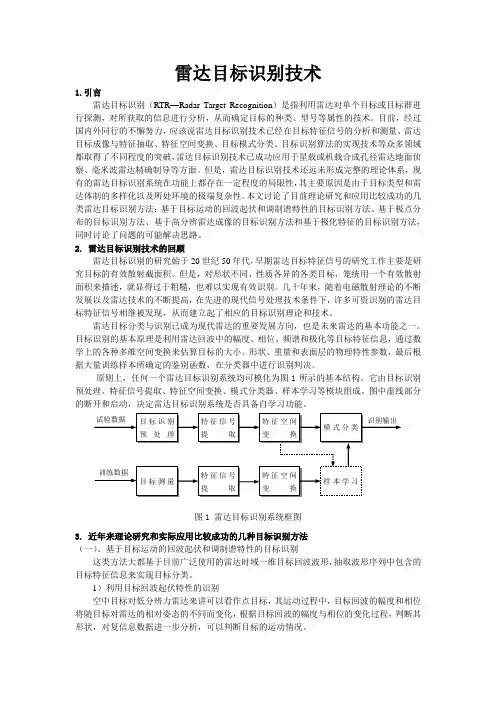
原则上,任何一个雷达目标识别系统均可模化为图1所示的基本结构。
sar雷达成像原理SAR(Synthetic Aperture Radar)雷达成像技术是一种利用雷达发射信号测量目标表面或深度的遥感技术,可以提供一种全方位覆盖范围和快速可靠的监测和识别能力,具有很大的专业性和快速反应性。
本文首先介绍了SAR雷达成像原理,并分析了SAR雷达成像技术两个主要参数:分辨率和稳定性。
最后,本文介绍了SAR原理的几种主要应用,并介绍了SAR雷达成像相关的几个术语。
SAR雷达成像原理涉及信号搜集、处理和成像的整个过程。
它的工作首先要求雷达发射有一定的脉冲频率及相应强度的电磁能量到整个测量区域。
电磁能量碰撞到目标表面或深部的波的一部分将逆向复射,接收装置接收复射电磁信号,并设置个数字格架及信号处理系统来处理数字信号进而生成成像文件。
SAR雷达成像技术两个主要参数是分辨率和稳定性。
分辨率是指目标在雷达成像图像上能够分辨出最小水平或垂直尺寸。
通常情况下,雷达成像图像的最小水平尺寸是在极坐标下的最小尺寸,即绕发射源旋转的距离。
稳定性是指雷达成像图像模糊状态的变化频率。
它可以用地点的高度变化,海平面有效深度范围等衡量。
SAR雷达在实际应用中被广泛用于海洋探测、植被监测、地表植被监测等领域。
一般来说,SAR原理可以用在空间监视、运动目标搜索、测绘、地理信息系统等方面。
另外,还可以用于气象探测、地面检测、自然灾害的遥感监测及工程建设的审核设计等。
在SAR雷达成像领域,主要有四个重要术语,即脉冲形状、针孔渠道、feathering和晕点。
脉冲形状指的是雷达脉冲的形状,如bandwidth、oversampling和信号/噪声比等。
针孔渠道指的是雷达脉冲最大传播方向上的正方形像素或回波信号计算方法,主要用于估计目标在工作平面上的坐标。
Feathering算法是另一种对成像进行改善的算法,它可以改善雷达成像产品的质量。
晕点是脉冲形状发生变化时出现的一种像素点,晕点的形成和激励电磁波的放射方式有关,一般可以通过改变成像参数来抑制晕点的出现。
SAR-ISAR运动目标检测及成像新技术研究SAR/ISAR运动目标检测及成像新技术研究摘要:合成孔径雷达(SAR)和逆合成孔径雷达(ISAR)是目前遥感领域中常用的成像技术,广泛应用于军事、航空航天、海洋和地质勘探等领域。
随着科学技术的快速发展,SAR/ISAR技术也在不断地向前演进。
本文主要研究SAR/ISAR运动目标检测及成像的新技术,包括目标检测、成像算法和图像处理等方面。
通过对相关技术的研究,可以提升运动目标检测及成像的效果,为实际应用提供更强大的支持。
一、引言合成孔径雷达(SAR)和逆合成孔径雷达(ISAR)是一种利用雷达技术进行成像的方法,通过收集回波信号来获取目标的信息。
SAR技术主要适用于目标与雷达平台相对静止的情况下,而ISAR技术则适用于目标和雷达平台相对运动的情况下。
由于其能够对地表目标进行高分辨率成像,具有天气无关、全天候、全时段的优势,因此在各个领域得到了广泛应用。
二、SAR/ISAR运动目标检测技术1. 多通道SAR多通道SAR技术是提高成像质量的一种重要手段,通过多个接收通道对目标进行接收信号的融合,从而提高成像的分辨率和抗干扰能力。
这种技术不仅可以提高目标的检测概率,还可以减小虚警率。
2. 成像算法SAR/ISAR成像算法主要有:时域成像算法、频域成像算法、脉冲压缩技术等。
其中,脉冲压缩技术是一种有效的成像技术,通过对回波信号进行压缩,可以提高成像分辨率和目标检测的能力。
3. 运动补偿由于雷达平台与目标之间的相对运动,会导致成像结果中出现模糊和失真现象。
因此,需要对目标的运动进行补偿,以提高成像质量。
运动补偿技术主要有预测滤波、相位校正和运动补偿成像算法等。
三、SAR/ISAR运动目标成像技术1. 目标形状重构通过ISAR技术,可以获得目标的高分辨率二维图像。
利用这些图像,可以对目标的形状进行重构,从而获得目标较为精确的形状信息。
这对于目标识别和目标定位非常重要。
逆合成孔径雷达二维及三维成像方法研究逆合成孔径雷达(Inverse Synthetic Aperture Radar,简称ISAR)是一种利用目标自身运动与雷达固定位置之间的相对运动合成雷达图像的技术。
通过ISAR技术,可以获取目标的高分辨率二维及三维图像,广泛应用于目标识别、目标定位和目标运动估计等领域。
ISAR成像方法主要包括以下几个步骤:目标运动补偿、回波数据预处理、回波数据二维成像和目标重构等。
首先,对于飞行器或者舰船等复杂目标,其运动状态会对成像质量产生很大影响,需要通过目标运动补偿来消除运动造成的模糊现象。
运动补偿的目的是将运动目标的散射中心保持静止,以便有效合成高质量的雷达图像。
通常,可以通过航迹传感系统等设备提供的目标位置信息来实现目标运动补偿。
其次,为了提高图像质量,需要对回波数据进行预处理,主要包括回波数据的校正和滤波。
校正主要是根据雷达系统的特性对回波数据进行校正,以消除系统误差;而滤波则是为了去除回波数据中的噪声和杂波,以保证成像图像的清晰度和准确性。
接下来,通过对预处理后的回波数据进行二维成像,可以得到目标的二维逆合成孔径雷达图像。
在二维成像中,通常采用FFT等算法将频域数据转换为时域数据,并利用拉普拉斯变换等算法进行相位相干性校正,从而获得目标的准确位置和轮廓信息。
最后,通过将多个二维成像结果进行融合和叠加,可以得到目标的三维逆合成孔径雷达图像。
三维成像主要利用多个视角的二维逆合成孔径雷达图像,采用三维重构算法进行求解,从而获取目标的立体信息。
总之,逆合成孔径雷达二维及三维成像方法在目标识别和目标定位中有着广泛应用。
通过对目标回波数据的处理和分析,可以获取目标的高清晰度图像,为后续的目标识别和目标定位提供有力支持。
同时,随着雷达技术的不断发展和创新,逆合成孔径雷达成像方法也将进一步优化和完善,以满足更加复杂和高精度的目标成像需求。

雷达系统中的信号处理与成像技术雷达系统是一种利用电磁波来探测目标的无线电系统。
它广泛应用于军事、航空、天气预报、海洋航行等领域。
作为一种重要的探测技术,雷达系统中的信号处理与成像技术的发展也非常迅速。
一、雷达系统的原理雷达系统通常由发射机、天线、接收机、处理器等几个部分组成。
雷达的基本工作原理是:发射出一束电磁波,由天线发射出去,当它遇到一个目标时,会产生反射波并被天线接收。
接收机会将接收到的反射波电信号传输到处理器中,处理器经过一定的分析处理后就可以获得目标的位置、速度、方位和高度等信息。
二、雷达成像技术的分类雷达成像技术可以分为以下两种:1. 合成孔径雷达成像技术合成孔径雷达成像技术是一种高分辨率成像技术。
这种成像技术可以提供极高的分辨率,可以产生地形图、海洋等领域所需的高质量成像数据。
它的主要原理是通过收集目标地表被照射到的回波,然后形成地图,进行分析处理。
这种技术需要多次照射,所以需要较长的时间才能够完成成像任务。
2. 脉冲Doppler雷达成像技术脉冲Doppler雷达成像技术是一种高速成像技术。
这种技术可以通过对高速移动目标的速度进行准确的识别和跟踪,在车辆自动导航、目标跟踪和军事应用等领域具有重要的应用价值。
它的主要原理是跟踪由目标散射的回波,根据回波的时间微调雷达频率,获得目标的速度及其位置数据。
三、雷达信号处理技术雷达信号处理技术是用于提取、处理雷达信号的一种技术。
准确的信号处理可以改善雷达探测的效果,提高成像的分辨率,从而更好地识别和跟踪目标。
雷达信号处理技术包括以下步骤:1.回波信号的接收与处理这个步骤初始时接收到的回波信号可能很微弱,因此需要将其放大,以便进一步处理。
2.对目标进行成像在成像期间,需要将回波信号变成三维图像,这样就可以更清楚地了解目标的位置和动态。
3.信号匹配与跟踪对于多个回波信号,需要通过信号匹配与跟踪来确定这些信号是来自于同一目标还是来自于不同的目标。
毫米波雷达成像算法
毫米波雷达成像算法主要包括以下步骤:
1.信号采集:通过雷达系统发射毫米波信号并接收目标反射的回波信号,获取包含目标信息的回波数据。
2.信号处理:对回波数据进行预处理,包括滤波、去噪、补偿等操作,以提高信号质量。
3.距离像估计:对处理后的回波数据进行距离像估计,得到每个目标点的距离像数据。
4.成像处理:对距离像数据进行成像处理,包括运动补偿、多普勒补偿、聚焦等操作,以提高成像质量。
5.目标检测与跟踪:在成像结果中检测并跟踪目标,提取目标的位置、速度、姿态等信息。
6.特征提取与分类:对目标进行特征提取和分类,以实现目标识别和分类。
在毫米波雷达成像算法中,信号处理和成像处理是关键步骤。
常用的信号处理算法包括匹配滤波器、自适应滤波器等;常用的成像处理算法包括频域成像、时域成像等。
为了提高算法性能,需要不断优化算法和参数选择,以适应不同的场景和应用需求。

航空航天行业中的成像雷达技术应用案例分析近年来,随着科技的不断发展,成像雷达技术在航空航天行业中的应用逐渐增多。
成像雷达技术是一种通过发送和接收雷达信号来获得目标图像的技术。
它具有高分辨率、全天候性和无需目标合作等特点,因此被广泛应用于航空航天领域。
本文将以几个实际案例为例,介绍航空航天行业中成像雷达技术的应用。
首先,成像雷达技术在航空领域的应用非常广泛。
航空成像雷达技术可以用于飞机自主导航、避障和目标检测等方面。
例如,在飞机自主导航中,成像雷达技术可以通过采集环境中的地物信息,绘制出地形图以及障碍物分布图,并通过与飞机导航系统集成,提供准确的导航指引。
这对于飞行员的操作和飞行安全具有重要意义。
其次,成像雷达技术在卫星遥感领域也有着广泛的应用。
通过卫星上搭载的成像雷达系统,可以获取地球表面的高分辨率图像。
这些图像可以用于地质勘探、资源调查、环境监测等领域。
例如,在地质勘探中,成像雷达技术可以探测地下的矿藏,帮助寻找宝贵的矿产资源。
在资源调查中,成像雷达技术可以观测冰川、森林、水域等自然资源的变化情况。
在环境监测方面,成像雷达技术可以实时检测土地沉降、海平面变化等现象,提供数据支持,从而帮助政府和科研机构制定相关政策。
此外,成像雷达技术在航天探测领域也发挥着重要的作用。
例如,成像雷达技术可以用于火星探测器的着陆导航。
通过测量火星表面的地形、岩石等特征,成像雷达可以为探测器提供准确的导航和避障信息,确保探测器的安全着陆。
同时,在宇宙空间中,成像雷达技术也可以用于对星系、恒星和行星等天体的观测。
通过探测宇宙中的电磁波信息,科学家可以了解宇宙的起源、演化和结构,并推动天体物理学的研究。
此外,成像雷达技术还在航空航天行业的其他领域产生着广泛应用。
例如,在飞机机载雷达中,成像雷达技术可以用于目标识别和目标跟踪。
通过获取目标的高分辨率图像,飞机可以实时分析目标的特征,并自动跟踪目标的运动轨迹。
在航天中,成像雷达技术可以用于太空碎片的探测和监测。
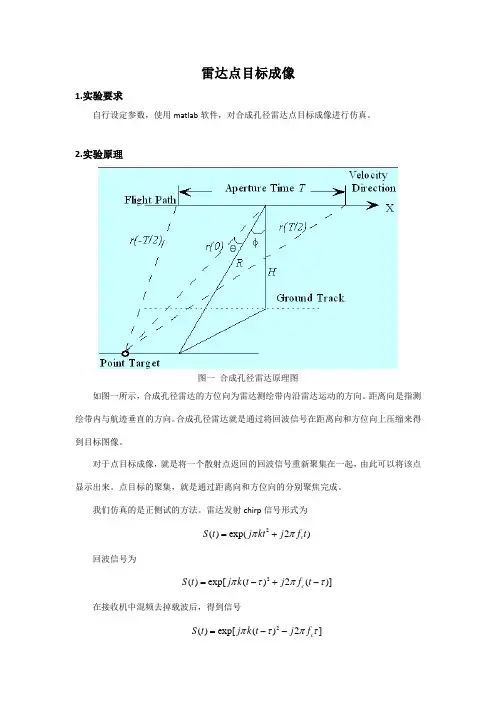
雷达点目标成像1.实验要求自行设定参数,使用matlab 软件,对合成孔径雷达点目标成像进行仿真。
2.实验原理图一 合成孔径雷达原理图如图一所示,合成孔径雷达的方位向为雷达测绘带内沿雷达运动的方向。
距离向是指测绘带内与航迹垂直的方向。
合成孔径雷达就是通过将回波信号在距离向和方位向上压缩来得到目标图像。
对于点目标成像,就是将一个散射点返回的回波信号重新聚集在一起,由此可以将该点显示出来。
点目标的聚集,就是通过距离向和方位向的分别聚焦完成。
我们仿真的是正侧试的方法。
雷达发射chirp 信号形式为2()exp(2)c S t j kt j f t ππ=+回波信号为2()exp[()2()]c S t j k t j f t πτπτ=-+-在接收机中混频去掉载波后,得到信号2()exp[()2]c S t j k t j f πτπτ=--可得信号的距离向信号形式为2exp[(2/)]j k t r c π-方位向信号形式为exp[4/]c j f r c π-其中()r t =当v t R 时有2()()2vt r t R R ≈+,知回波信号在方位向上也是线性调频信号,其调频率为22v Rλ,λ为载波波长。
对于成像算法,我们采用经典的距离多普勒算法,即SD 算法。
他的基本思想是基本思想是将二位处理分解为两个一维处理的级联方式,即分别压缩距离向和方位向。
由于雷达的飞行线路接近直线,所以方位向和距离向相互有影响,要对数据进行徙动校正。
但是由于机载SAR 飞行范围小,距离弯曲量很小,故可以不用考虑徙动校正。
SD 算法的具体流程图如图二所示。
图二 SD 算法的具体流程图4.实验过程参数设置:飞机飞行高度:10000m下视角:45度飞机的飞行速度:100m/s合成孔径时间:1sPRF :500HzK :113010⨯Hz/s脉冲宽度:10us载波频率: 10510Hz ⨯回波点阵大小:501X501对数据进行距离向压缩,得到图一。
雷达成像技术的应用与发展雷达成像技术是一种通过雷达波进行目标成像的技术。
它利用雷达波在空间中以恒定速度传输的特性来测量被扫描物体的三维空间数据,并从中重建物体的三维图像。
雷达成像技术在军事、民用等多个领域都有着广泛的应用,随着科技的发展,其应用范围也在不断拓展。
第一部分:雷达成像技术的基本原理雷达成像技术的基本原理是利用距离测量和角度测量推导出空间中目标的三维位置和形状。
雷达成像技术可以分为两种方式,分别是合成孔径雷达成像技术和相控阵雷达成像技术。
合成孔径雷达系统是一种高分辨率雷达成像系统,在进行测量时通过逐渐增加距离到发射天线和接收天线之间的距离来控制发射和接收的方向。
合成孔径雷达成像技术中使用的天线主要分为平面阵列天线和卫星管天线。
相控阵雷达是一种基于雷达坑面和数字信号处理技术进行目标成像的高性能雷达成像技术。
相比于传统的机械扫描雷达,相控阵雷达可以快速获取目标的三维信息,具有灵敏度高、精度高等优点。
第二部分:雷达成像技术在军事领域中的应用雷达成像技术在军事领域中有着广泛的应用。
其中最重要的应用领域之一是雷达远程侦察。
它通过成像雷达技术,可以在不进入敌方防御区域的情况下对敌方目标进行精确的探测和识别。
雷达成像技术在军事领域中的另一个应用领域是指挥和控制系统中的雷达测距。
它可以提供给指挥员准确的敌情信息,帮助指挥员制定更有效、更精确的战术。
第三部分:雷达成像技术在民用领域中的应用雷达成像技术在民用领域中有着广泛的应用。
例如,在道路交通领域,雷达成像技术可以用于运动车辆的速度测量和信号灯的控制。
在航空航天领域,雷达成像技术可以用于飞机飞行和导航控制系统中,也可以识别降落航道的位置进行引导。
在建筑领域,雷达成像技术可以用于建筑物的结构安全监测,帮助工程师和设计师识别问题并采取适当的预防措施。
总之,随着科技的发展,雷达成像技术在各个领域的应用也在不断扩展和拓展。
在未来,雷达成像技术将继续发挥重要作用,为人类提供更加便捷、精确的服务。
雷达成像技术的发展与应用雷达作为一种重要的探测技术,在军事、航空、气象、通信等领域都有广泛的应用。
而雷达成像技术则是其应用领域中的一个重要分支,它通过对反射回来的电磁波进行处理,可以形成目标物的空间图像,真正实现“看得见”目标物的效果。
本文将介绍雷达成像技术的发展历程以及其在实际应用中的作用。
1、雷达成像技术的发展历程雷达成像技术的发展历程可以追溯到上个世纪60年代初期。
当时,军方为了在战争中获得更准确的目标信息,开始研究雷达成像技术,并在1964年完成了第一个运用雷达成像技术的装备-发射机到接收机成像雷达。
该装备可以实现对一定范围内目标物的成像,但质量较低,分辨率不够高。
随着科技不断进步,雷达成像技术也不断得到改进和完善。
1974年,美国MIT大学研究人员发明了合成孔径雷达(SAR)技术。
该技术利用雷达信号与平台运动相结合,进行信号处理和成像,可以获得比传统雷达更高分辨率的图像。
随后,SAR技术在全球范围内得到普及,广泛应用于军用、地质勘探、环境监测等领域。
除了SAR技术,基于光学、超声波等原理的雷达成像技术也得到了发展。
近年来,随着计算机、图像处理技术、传感器等方面的不断进步,雷达成像技术也在不断进行研究与发展。
2、雷达成像技术在实际应用中的作用2.1 军事领域在军事领域,雷达成像技术一直是一项非常重要的技术。
它可以通过对敌方防御区域进行扫描,获取敌方军事设施、地下空间、隧道和道路等信息,以进行军事情报的收集和侦察。
此外,雷达成像技术也被广泛应用于飞机、无人机的导航和制导系统,使得飞行器可以更准确地进行目标探测和导航。
2.2 航空领域在航空领域,雷达成像技术也扮演着重要角色。
航空雷达成像技术常被用于飞行时经常遭遇的低空、恶劣气象等极端环境下,以及在浓雾、灰尘、烟雾等视野不良的情况下,避免因环境因素导致飞带来的安全隐患和飞行受阻。
2.3 气象领域在气象领域,雷达成像技术可以实现对极端天气事件的的实时监控和预警,对异常气象的判断和识别提供了可靠的技术保障。
dbs雷达成像原理-回复DBS雷达成像原理是一种利用射频技术进行目标探测和成像的高新技术。
DBS(Doppler Beam Sharpening)是一种通过同时发射多个窄束探测信号并利用多波束叠加的方法,以提高雷达距离分辨率和目标探测能力的技术。
本文将详细介绍DBS雷达成像原理,并一步一步回答相关问题,以帮助读者更好地理解。
首先,什么是雷达成像?雷达成像是通过雷达技术对目标进行探测和成像的过程。
传统的雷达主要用于测距、测速和目标检测等应用,但对于目标细节的获取能力有一定的限制。
而雷达成像技术则通过对目标进行高分辨率成像,能够提供更为精细和详尽的目标信息。
接下来,我们来了解DBS雷达成像的基本原理。
DBS雷达成像原理的核心是多波束技术和多通道信号处理技术。
多波束技术是指同时发射多个窄束探测信号,并接收目标的回波信号。
通过同时发射多个窄束信号,雷达可以在较短的时间内获得多个不同的探测方向的目标信息。
这种多波束的特点使得雷达能够获取到目标的不同方向上的散射信息,从而提高了雷达的目标探测能力。
多通道信号处理技术是指通过对多个接收通道接收到的信号进行合成,以获得高分辨率的成像结果。
每个接收通道接收到的信号都包含了目标的散射信息,但由于目标散射信号的强度非常微弱,单个通道的信噪比较低,因此无法获得高质量的成像结果。
通过将多个通道接收到的信号进行叠加处理,可以抑制噪声,提高信噪比,从而得到高分辨率成像结果。
在实际应用中,DBS雷达成像过程主要分为以下几个步骤:1. 发射多个窄束信号:雷达通过同时发射多个窄束信号,每个窄束信号具有不同的探测方向。
这些窄束信号可以通过天线阵列或相位控制技术实现。
2. 接收目标回波信号:雷达接收目标回波信号,并将其转化为电信号。
由于目标散射信号的强度非常微弱,需要对接收到的信号进行放大和滤波等前置处理。
3. 数据采集和存储:雷达将接收到的信号进行采样和数字化处理,得到数字信号。
这些数字信号将被存储在内存中,以便之后的处理和分析。
58电子技术Electronic Technology电子技术与软件工程Electronic Technology & Software Engineering1 引言由于雷达在现代战争中的大量使用,促使人们对雷达成像开始追求更高的分辨率。
随着宽带微波技术的出现,雷达在多维信息量的处理方面有了很大的改善。
要想实现成像高分辨,就必须在进行回波信号的脉冲压缩的同时利用合成天线孔径[1]。
根据雷达与目标间相对运动形成的合成孔径,成像雷达包含合成孔径雷达与逆合成孔径雷达。
二者的区别在于合成孔径的形成原因,以雷达的运动为准,雷达动为正,即SAR ,雷达不动为逆,即ISAR 。
Carl Wiley 提出的改善角分辨率方法,运用了频率的差异进行分析,标志着合成孔径开始出现[2]。
数字化处理SAR 的方法于1970年开始运用于实践中,不久,运用数字处理SAR 的系统问世[3]。
进入21世纪,国内的CS 理论应用于处理雷达信号的探索已经逐步开始,中科院电子学研究所携手空间科学与应用研究中心开始着手压缩感知基础理论、二维雷达成像算法、超宽带穿墙雷达、电磁逆散射和探地雷达等方面的研究。
谢晓春等人提起的CS 方法应用于距离向与传统成像算法[4],是一种在对复基带雷达回波信号模型的稀疏性分析后建立了二维成像方案。
尽管CS 理论已处于相对完善水平,但应用于解决现实雷达问题的方法却不足以站稳脚跟,而且当下实时信号处理系统处理复杂的求解算法的能力有限。
为让基于CS 的雷达稀疏信号的处理技术真正能在现实中推广,其存在问题更要求我们不断进步发展。
针对目前雷达成像在高精度和多维度要求下,传统雷达成像算法图像采样效率低、图像恢复速度慢且图像恢复质量差的问题,本文提出一种改进幅度稀疏表示雷达成像算法。
以合成孔径雷达(SAR )模型为基础,结合优化的幅度稀疏表示重建算法进行雷达成像算法建模,在此模型下对一维SAR 成像和二维SAR 成像进行了研究,提出了一些可能的解决方案并给出了实验结果。
雷达成像的基本原理
雷达成像的基本原理是利用电磁波的散射和反射特性来获取目标的空间位置和形态信息。
雷达系统通过发射一束脉冲信号,经过目标的散射和反射后,接收回来的信号被分析和处理,最终形成目标的影像。
雷达成像的基本原理包括以下几个步骤:
1. 发射信号:雷达系统通过发射器产生一束高频电磁波信号,通常采用微波或毫米波频段的电磁波。
这个发射信号会沿着指定的方向传播。
2. 目标反射:发射信号遇到目标后,会被目标表面的散射体所反射。
目标的形态和材料特性会影响反射信号的强度、相位和频率等。
3. 接收信号:接收天线用来接收目标反射回来的信号。
这些信号经过接收天线和前端电路的放大和处理后,会被转换为数字信号。
4. 数据处理:接收到的数字信号经过一系列的信号处理算法和技术进行处理。
包括脉冲压缩、距离测量、速度测量、角度测量等。
5. 成像显示:经过数据处理后,可以得到目标的成像数据。
这些数据可以通过不同的可视化方式呈现出来,比如二维图像或三维图像。
雷达成像的基本原理是通过测量信号的时延、幅度和相位等参数,从而获得目标的距离、方位、高度和移动速度等信息。
这些信息可以在实时或离线的模式下显示和分析,用于目标识别、跟踪和定位等应用。
第28卷第3期 计算机仿真 2011年3月 文章编号:1006~9348(2011)03—0015—04
雷达成像识别的研究
秦淋。,裴承呜‘,徐秀丽 ,刘东来 (1.西北工业大学,陕西西安710072;2.目标与环境电磁散射辐射国防科技重点实验室,上海200090) 摘要:研究雷达无线目标识别问题,针对传统方法成像散焦严重、分辨率低的问题,根据ISAR成像模型,利用滤波一逆投影 (FBP)方法,实现逆合成孔径雷达(ISAR)超分辨成像。滤波一逆投影方法避免了散射中心点的散焦和位置偏移,改善了成 像质量。结合谱外推的方法后,聚焦效果好,成像分辨率得到明显提高。选择适当的插值倍数,不仅简单易于实现,而且在 计算上效率高。在进行2-D散射成像仿真验证时,结果证明了方法的有效性和准确性。 关键词:散焦;逆合成孔径雷达;谱外推;滤波一逆投影;超分辨;插值 中图分类号:TP301.6 文献标识码:A
Filter Back—Projection Algorithm Based on Spectral Extrapolation for ISAR Super-Resolution Imaging
QIN Lin ,PEI Cheng—ming ,XU Xiu—li ,LIU Dong—lai (1.Northwestern Polytechnieal University,Xi’an Shanxi 7 10072,China; 2.National Key Lab.of Electromagnetical Environmental Research,Shanghai 200090,China)
ABSTRACT:Contraposing the sho ̄ages 6f conventional methods,such as badly defocusing and low resolution in im— aging,this paper researches the model of ISAR imaging and utilizes Filter Back-Projection algorithm based on spec— tral extrapolation to obtain ISAR super—resolution imaging.FBP algorithm avoids defocusing and position excursion of the scattering center and increases the robustness.With the help of spectral extrapolation,they are focused well and the resolution is obviously improved.When a proper interpolation muhiple is applied,the method is not only simple to implement,but also effective in computing.Simulation results show the availability and the accuracy of the presen— ted approach. KEYWORDS:Defocusing;ISAR;Spectral extrapolation;Filter back—projection;Super—resolution;Interpolation
1 引言 ISAR成像能够提供目标上散射点在二维空间的分布, 是目标识别中非常重要的方法。传统的F 方法,是采用增 加频率带宽B和扩大目标转角0来实现较高的成像分辨率。 而实际雷达应用中,由于目标的机动和姿态调整,大部分情 况下,在较大方位角范围内很难对目标进行观测,只能得到 有限方位角的回波数据。即使得到较大方位角的测量数据, 也会由于散射点的越距离单元走动等现象和运动补偿而造 成ISAR分辨率下降 J。而且,FFTI1使用的前提是必须满足 二维解耦合,当转角增大到一定程度时就已不再满足二维解 耦合的条件。为克服分辨率问题,大量高分辨算法得到了应 用和发展” 。但很多的高分辨方法也是存在不足的,比如, 2一D ESPRIT和2一D线性预测等方法中,模型参数的估计相 当重要,而在噪声存在的条件下,参数是很难准确估计的;最 收稿日期:2010一O1—11修回日期:2010—01—23 大似然估计法在计算上效率不高而且对初始状态的要求非 常高 。 针对上述问题,本文采用了谱外推结合滤波一逆投影的 方法重构图像。该方法不受菲涅耳近似的限制,与ISAR成 像的几何关系独立,可以用来处理谱数据外推后的超带宽、 大处理角的情况,从而有效解决成像的聚焦和分辨率问题。 2 ISAR成像原理 图1为ISAR成像几何关系图_5 J。雷达天线固定于某一 位置不动,目标绕旋转中心O旋转。图中u—v坐标是相对于 雷达天线固定的,其坐标原点为目标旋转中心O,雷达到旋转 中心的距离R 为一常数。x—y坐标系是固定于目标上的一 组坐标,随着目标的旋转而旋转,坐标原点同样在O点上。 丽组坐标之间的关系为 f“ 。。 ysin0 f1) tv=一xsin0+yeos0
从雷达到目标上一点( ,Y)处的距离为
一】5一 L V 巴 、
R,(x,y) \ / 雷达\= l
图1成像几何图
R ( ,y)=、//( + ) +u f21 =[R + Y +2R0(ycos0一xsin0)】 目标回波是目标多散射中心的线性组合。根据雷达方 程,得到近场条件下观测角为 时雷达相干接收信号的数学 表达式即成像公式:
,( , )=J ,y)exp{一j2 ̄-k[ ( ,y)一Ro】) Y (3)
,Y)为目标散射函数,R ( ,Y)为目标上对应点,k= 2/A。 ISAR像的距离向分辨率靠发射宽带信号获得,为:
6r (4) 要获得ISAR方位向的分辨率,必须使目标相对于雷达 射线转动一定的角度,它是基于多普勒频率分辨的。可通过 下式计算:
6 (5) 式(4)、式(5)中,c为电波传播速度,日为发射信号带宽, 为目标转过的角度即成像角度,A为波长。要得到方位向 的多普勒频率越高,则所需的相干积累角度和时间就越长, 但转动角度越大,其误差也越大,在离旋转中心比较远的左 右两端的散射点会因积累角度的增大而移动到相邻的距离 单元,甚至出现越距离单元走动(MTRC),造成能量泄漏,以 至于直接用FFT成像时图像模糊。
3 成像技术研究 重构后的图像与原始目标的吻合是ISAR成像中需要实 现的关键问题,也是衡量成像算法优劣的重要因素。使用 成像算法成像,不仅散焦严重,而且图像分辨率很低。 这与FFT本身算法的局限性有关。针对这两个问题,对成像 处理技术进行改进。 3.1 滤波一逆投影成像处理技术
一】6一
本文采用滤波一逆投影(FBP)的方法解决成像散焦的 问题。滤波一逆投影的方法通过将接收信号作时间对齐再 沿着该曲线轨迹相加,得到目标回波的最大能量,实现相干 聚焦,从而提高成像质量,避免图像散焦严重的问题。 3.1.1 原理 近场条件下,雷达“投影”测量是沿圆弧线5(见图1)积 分得到的,其方程为
:Z =[ + +y +2R0(ycos0一xsin0)]寺~R0 (6) 为避免散射中心点的散焦和位置偏移,正确实现聚焦, 必须选取与目标投影积分相一致的轨迹来完成逆投影图像 再现,即此时的逆投影必须沿弧线.s来完成。 由此得到近场条件下的滤波一逆投影成像表示为: fPo(z ):IiB( + …),( + , )exp(J27rkl )d I ~ ): ( )exp(j2仃k…z )dO (7) I … Lz :[R + + +2R0(ycos0一xsin0)]寺一Ro k…为频移量。其中,第一步为滤波过程,表征了存在两 维耦合下的径向合成,得到高分辨距离分布图,这一步可直 接用 来完成;第二步为逆投影过程,它表示横向聚焦过 程。 3.1.2 仿真验证 1)模型设置 构建点座标图,见图2所示。四个点目标的坐标分别为 ( ,Y)=(0.2,0.05),(0.2,一0.05),(一0.45,0)和(一0. 35,0)。利用雷达方程对各散射点进行矢量求和获取点目标 仿真成像数据。
L
60.45,D) 。 m -0.35,0)o ●0.5 1F、 fO.2,-0.o5)
图2点座标图 2)成像处理 分别采用 和滤波一逆投影法对成像数据进行成像 处理,成像结果如图3、图4所示。 按5cm分辨率计算,采用2D—FFT方法重构图像,如图 3所示,图像散焦严重,实际间隔为lOcm仍无法分辨。这是 因为旋转目标成像中所获取的目标谱位于一环形谱域上,而 且成像系统的点扩散函数( ,)的主瓣宽度大,旁瓣电平 高,既影响对目标的分辨,也严重影响成像的动态范围。同 时, 算法再现图像要求成像数据可近似为一矩形谱窗, 满足二维解耦合。滤波一逆投影方法的成像结果见图4,其 图3 2一D FFT算法成像 图4朋P算法成像 插值设置为6倍。可见,本方法避免了散射中心点的散焦和 位置偏移,正确实现了聚焦。点目标得到了明显的分辨,散 焦问题得到解决。 3.2 谱数据双向外推技术 测量范围之外的空间谱域数据假定为零,这正是限制分 辨力提高的根本所在。AR模型是将观测角度之内的空间谱 数据外推到观测角之外,利用获得观测数据估计处测量范围 之外的一部分空间谱数据。这样在不扩大成像角的情况下, 避免了聚焦误差,又等效地加大了成像孔径,提高了方位向 分辨力,从而最终获得高分辨的ISAR图像。 3.2.1 原理 为了估计出成像角度之外的谱域数据,首先,要构造一 个前后向预测滤波器。一个 阶的前后向预测滤波器可以 用式(8)表示。 M ( )=∑akG ̄(i一 )
=l M ( ):∑bk ( + ) (8)
(i)是目标转过 时,距离门内各散射点复散射强度 的叠加的离散表示形式; ( )是由前后向预测滤波器估计 出的空间谱; ( )是由后向预测滤波器估计出的空间谱; 与b 是预测滤波器的系数,也是肘阶AR模型的系数,且a = b ,确定系数a 与b 即可对试验数据进行谱扩展,实现图像 空间横向分辨力的提高。理论上可用Burg算法计算系数a 与b ,这是一种有效而且稳定的算法。 3.2.2 仿真验证 谱数据外推可以提高图像分辨率。下面用点目标的一 维距离像做以说明。两个点目标分别位于(0,10)和(0,10. 15)。雷达位于原点(0,0)。采用8—12GHz的扫频,图5(a) 是这两点目标经胛 算法得出的一维距离像。将谱双向外 推至6—14GHz再处理成其一维距离像,见图5(b)。 (b)距离/m 图5 一维距离像比较 显然,在主瓣宽度上二者相差很大,谱外推后主瓣宽度 减小、旁瓣降低,有利于提高图像的分辨率。谱外推不是从 测量数据进行前后向数据预测,而是在频率和角度范围里进 行扩展的。测量数据是在整个二维数据阵列中,故在外推数 据范围较宽时,也不存在“从外推数据来外推数据”的现象, 从而提高了可信度。这样,利用外推方法得到更宽范围的空 间谱数据,不会因为增大转角和拓宽频率导致目标的实际运 动更复杂,成像处理更难,反而既避免了散射点的越距离单 元走动,又等效地扩大了成像孔径,使方位向和距离向的分 辨率得到提高。 3.3谱外推结合滤波一逆投影法 在滤波~逆投影算法中,其频率和ISAR成像的几何关 系是独立的,不需要经过菲涅耳近似。因此,滤波一逆投影 方法不会受到 法转角和带宽的严格限制。根据这一点, 可以通过滤波一逆投影结合谱外推的方法来提高成像的分 辨率。同时,选择适当的窗函数,如Hamming窗,一定程度上 抑制旁瓣电平对目标的影响。 本文将二者结合,角度双向外推为一20—2O度,带宽双 向外推为6GHz一14GHz,中心频率为IOGHz,插值倍数仍为6 倍,成像如图6所示。横向和纵向的分辨率都有明显的提 高,与图2实际点模型吻合,可信度高。 滤波一逆投影方法避免了散射中心点的散焦和位置偏 移,正确实现聚焦;谱外推的方法可提高成像的分辨率。 滤波一逆投影结合谱外推方法的使用,解决了成像散焦 问题,有效提高了成像分辨率。需要指出的是,在回波处理 过程中,应该抵消雷达与目标间的距离 。成像步骤归纳如 下: 1)根据相关参数和分辨率要求计算带宽 、角度范围 步进频率4厂和步进角度/tO;