利用Nystrom方法进行谱聚类及其在图像分割中的应用
- 格式:ppt
- 大小:377.00 KB
- 文档页数:6
基于肿瘤形状特征与点云方法的PET-CT多模态图像神经母
细胞瘤分割
周维钦;王朝立;孙占全;陈素芸;李超;傅宏亮;刘晓虹
【期刊名称】《软件导刊》
【年(卷),期】2024(23)3
【摘要】通过智能学习方法对PET-CT图像进行肿瘤自动分割,是辅助医生制定诊疗计划的重要研究领域。
PET-CT图像兼具PET和CT两种模态优点,传统方法大多只简单的将两种模态的图像进行配准和融合后提取特征,忽略了神经母细胞瘤具有肿瘤边界轮廓不规则的特点。
为此,提出一种两阶段的自动分割框架结构模型。
首先,利用3D卷积神经网络定位肿瘤位置;然后在分割出的肿瘤区域附近生成多模态点云数据,并提取肿瘤的形状轮廓特征;最后,将两个网络提取的特征进行融合用来预测最终分割结果。
在自有数据集和公共数据集上,将所提模型与其他多模态方法进行比较实验,实验结果验证了所提模型的优越性与有效性。
以期为研究神经母细胞瘤分割的研究人员提供参考与借鉴。
【总页数】6页(P128-133)
【作者】周维钦;王朝立;孙占全;陈素芸;李超;傅宏亮;刘晓虹
【作者单位】上海理工大学光电信息与计算机工程学院;上海交通大学医学院附属新华医院核医学科;上海市第八人民医院放射科
【正文语种】中文
【中图分类】TP183
【相关文献】
1.基于颜色和形状特征的棉花害螨图像分割方法
2.基于SVM模型参数优化的多模态MRI图像肿瘤分割方法
3.基于层次聚类的多模态磁共振脑肿瘤图像的自动分割方法
4.一种基于超像素和改进U-net的多模态脑部肿瘤图像分割方法
5.基于改进U-Net的PET-CT双模态头颈部肿瘤分割
因版权原因,仅展示原文概要,查看原文内容请购买。
SILC超像素分割算法详解(附Python代码)SILC算法详解⼀、原理介绍SLIC算法是simple linear iterative cluster的简称,该算法⽤来⽣成超像素(superpixel)算法步骤:已知⼀副图像⼤⼩M*N,可以从RGB空间转换为LAB空间,LAB颜⾊空间表现的颜⾊更全⾯假如预定义参数K,K为预⽣成的超像素数量,即预计将M*N⼤⼩的图像(像素数⽬即为M*N)分隔为K个超像素块,每个超像素块范围⼤⼩包含[(M*N)/K]个像素假设每个超像素区域长和宽都均匀分布的话,那么每个超像素块的长和宽均可定义为S,S=sqrt(M*N/K)遍历操作,将每个像素块的中⼼点的坐标(x,y)及其lab的值保存起来,加⼊到事先定义好的集合中每个像素块的中⼼点默认是(S/2,S/2)进⾏获取的,有可能落在噪⾳点或者像素边缘(所谓像素边缘,即指像素突变处,⽐如从⿊⾊过渡到⽩⾊的交界处),这⾥,利⽤差分⽅式进⾏梯度计算,调整中⼼点:算法中,使⽤中⼼点的8领域像素点,计算获得最⼩梯度值的像素点,并将其作为新的中⼼点,差分计算梯度的公式:Gradient(x,y)=dx(i,j) + dy(i,j);dx(i,j) = I(i+1,j) - I(i,j);dy(i,j) = I(i,j+1) - I(i,j);遍历现中⼼点的8领域像素点,将其中计算得到最⼩Gradient值的像素点作为新的中⼼点调整完中⼼点后即需要进⾏像素点的聚类操作通过聚类的⽅式迭代计算新的聚类中⼼;⾸先,需要借助K-means聚类算法,将像素点进⾏归类,通过变换的欧⽒聚距离公式进⾏,公式如下(同时参考像素值和坐标值提取相似度):通过两个参数m和S来协调两种距离的⽐例分配。
参数S即是上⾯第③步计算得出的每个像素块的长度值,⽽参数M为LAB空间的距离可能最⼤值,其可取的范围建议为[1,40]为了节省时间,只遍历每个超像素块中⼼点周边的2S*2S区域内的像素点,计算该区域内每个像素点距离哪⼀个超像素块的中⼼点最近,并将其划分到其中;完成⼀次迭代后,重新计算每个超像素块的中⼼点坐标,并重新进⾏迭⼆、代码实现1import math2from skimage import io, color3import numpy as np45class Cluster(object):67 cluster_index = 189def__init__(self, row, col, l=0, a=0, b=0):10 self.update(row, col, l, a, b)11 self.pixels = []12 self.no = self.cluster_index13 Cluster.cluster_index += 11415def update(self, row, col, l, a, b):16 self.row = row17 self.col = col18 self.l = l19 self.a = a20 self.b = b212223class SLICProcessor(object):24 @staticmethod25def open_image(path):26 rgb = io.imread(path)27 lab_arr = color.rgb2lab(rgb)28return lab_arr2930 @staticmethod31def save_lab_image(path, lab_arr):32 rgb_arr = b2rgb(lab_arr)33 io.imsave(path, rgb_arr)3435def make_cluster(self, row, col):36 row=int(row)37 col=int(col)38return Cluster(row, col,39 self.data[row][col][0],40 self.data[row][col][1],41 self.data[row][col][2])4243def__init__(self, filename, K, M):44 self.K = K45 self.M = M4647 self.data = self.open_image(filename)48 self.rows = self.data.shape[0]49 self.cols = self.data.shape[1]50 self.N = self.rows * self.cols51 self.S = int(math.sqrt(self.N / self.K))5253 self.clusters = []54 bel = {}55 self.dis = np.full((self.rows, self.cols), np.inf)5657def init_clusters(self):58 row = self.S / 259 col = self.S / 260while row < self.rows:61while col < self.cols:62 self.clusters.append(self.make_cluster(row, col))63 col+= self.S64 col = self.S / 265 row += self.S6667def get_gradient(self, row, col):68if col + 1 >= self.cols:69 col = self.cols - 270if row + 1 >= self.rows:71 row = self.rows - 27273 gradient = (self.data[row + 1][col][0] +self.data[row][col+1][0]-2*self.data[row][col][0])+ \74 (self.data[row + 1][col][1] +self.data[row][col+1][1]-2*self.data[row][col][1]) + \75 (self.data[row + 1][col][2] +self.data[row][col+1][2]-2*self.data[row][col][2])7677return gradient7879def move_clusters(self):80for cluster in self.clusters:81 cluster_gradient = self.get_gradient(cluster.row, cluster.col)82for dh in range(-1, 2):83for dw in range(-1, 2):84 _row = cluster.row + dh85 _col = cluster.col + dw86 new_gradient = self.get_gradient(_row, _col)87if new_gradient < cluster_gradient:88 cluster.update(_row, _col, self.data[_row][_col][0], self.data[_row][_col][1], self.data[_row][_col][2])89 cluster_gradient = new_gradient9091def assignment(self):92for cluster in self.clusters:93for h in range(cluster.row - 2 * self.S, cluster.row + 2 * self.S):94if h < 0 or h >= self.rows: continue95for w in range(cluster.col - 2 * self.S, cluster.col + 2 * self.S):96if w < 0 or w >= self.cols: continue97 L, A, B = self.data[h][w]98 Dc = math.sqrt(99 math.pow(L - cluster.l, 2) +100 math.pow(A - cluster.a, 2) +101 math.pow(B - cluster.b, 2))102 Ds = math.sqrt(103 math.pow(h - cluster.row, 2) +104 math.pow(w - cluster.col, 2))105 D = math.sqrt(math.pow(Dc / self.M, 2) + math.pow(Ds / self.S, 2))106if D < self.dis[h][w]:107if (h, w) not in bel:108 bel[(h, w)] = cluster109 cluster.pixels.append((h, w))110else:111 bel[(h, w)].pixels.remove((h, w))112 bel[(h, w)] = cluster113 cluster.pixels.append((h, w))114 self.dis[h][w] = D115116def update_cluster(self):117for cluster in self.clusters:118 sum_h = sum_w = number = 0119for p in cluster.pixels:120 sum_h += p[0]121 sum_w += p[1]122 number += 1123 _h =int( sum_h / number)124 _w =int( sum_w / number)125 cluster.update(_h, _w, self.data[_h][_w][0], self.data[_h][_w][1], self.data[_h][_w][2])126127def save_current_image(self, name):128 image_arr = np.copy(self.data)129for cluster in self.clusters:130for p in cluster.pixels:131 image_arr[p[0]][p[1]][0] = cluster.l132 image_arr[p[0]][p[1]][1] = cluster.a133 image_arr[p[0]][p[1]][2] = cluster.b134 image_arr[cluster.row][cluster.col][0] = 0135 image_arr[cluster.row][cluster.col][1] = 0136 image_arr[cluster.row][cluster.col][2] = 0137 self.save_lab_image(name, image_arr)138139def iterates(self):140 self.init_clusters()141 self.move_clusters()142#考虑到效率和效果,折中选择迭代10次143for i in range(10):144 self.assignment()145 self.update_cluster()146 self.save_current_image("output.jpg")147148149if__name__ == '__main__':150 p = SLICProcessor('beauty.jpg', 200, 40)151 p.iterates()三、运⾏效果截图(原图)(效果图)代码参考了https:///laixintao/slic-python-implementation,且做了改进作为⼀枚技术⼩⽩,写这篇笔记的时候参考了很多博客论⽂,在这⾥表⽰感谢,转载请注明出处......。
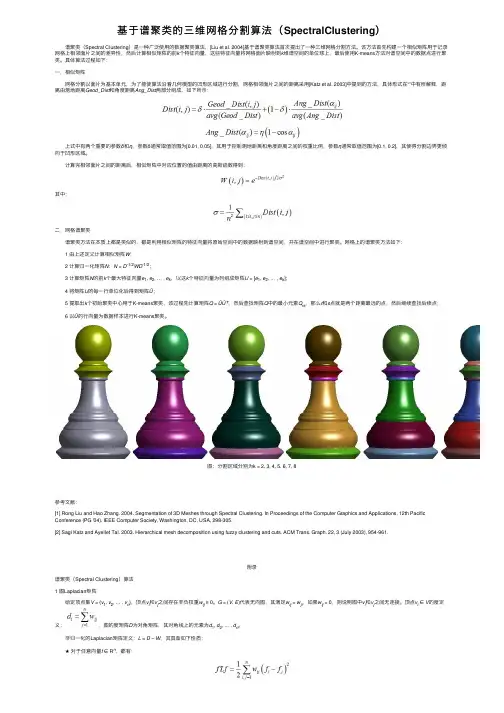
基于谱聚类的三维⽹格分割算法(SpectralClustering) 谱聚类(Spectral Clustering)是⼀种⼴泛使⽤的数据聚类算法,[Liu et al. 2004]基于谱聚类算法⾸次提出了⼀种三维⽹格分割⽅法。
该⽅法⾸先构建⼀个相似矩阵⽤于记录⽹格上相邻⾯⽚之间的差异性,然后计算相似矩阵的前k个特征向量,这些特征向量将⽹格⾯⽚映射到k维谱空间的单位球上,最后使⽤K-means⽅法对谱空间中的数据点进⾏聚类。
具体算法过程如下:⼀.相似矩阵 ⽹格分割以⾯⽚为基本单元,为了能使算法沿着⼏何模型的凹形区域进⾏分割,⽹格相邻⾯⽚之间的距离采⽤[Katz et al. 2003]中提到的⽅法,具体形式在“”中有所解释,距离由测地距离Geod_Dist和⾓度距离Ang_Dist两部分组成,如下所⽰: 上式中有两个重要的参数δ和η,参数δ通常取值范围为[0.01, 0.05],其⽤于控制测地距离和⾓度距离之间的权重⽐例,参数η通常取值范围为[0.1, 0.2],其使得分割边界更倾向于凹形区域。
计算完相邻⾯⽚之间的距离后,相似矩阵中对应位置的值由距离的⾼斯函数得到:其中:⼆.⽹格谱聚类 谱聚类⽅法在本质上都是类似的,都是利⽤相似矩阵的特征向量将原始空间中的数据映射到谱空间,并在谱空间中进⾏聚类。
⽹格上的谱聚类⽅法如下: 1 由上述定义计算相似矩阵W; 2 计算归⼀化矩阵N:N = D-1/2WD-1/2; 3 计算矩阵N的前k个最⼤特征向量e1, e2, … , e k,以这k个特征向量为列组成矩阵U = [e1, e2, … , e k]; 4 将矩阵U的每⼀⾏单位化后得到矩阵Ȗ; 5 提取出k个初始聚类中⼼⽤于K-means聚类,该过程先计算矩阵Q = ȖȖT,然后查找矩阵Q中的最⼩元素Q rs,那么r和s点就是两个距离最远的点,然后继续查找后续点; 6 以Ȗ的⾏向量为数据样本进⾏K-means聚类。
模糊C均值聚类及其有效性检验与应用研究一、内容概要本研究专注于模糊C均值聚类(Fuzzy Cmeans Clustering),这是一种在数据挖掘和模式识别领域广泛应用的无监督学习方法。
通过结合模糊理论和聚类技术,Fuzzy C均值聚类能够在模糊数据集中发现并提取有价值的信息。
引言: 介绍模糊集理论的基本概念,并阐述模糊C均值聚类算法的起源和基本原理,以及其在各领域的应用前景。
模糊C均值聚类算法: 详尽描述算法的具体步骤,包括初始化、模糊划分、聚类和迭代优化等,以及对初始聚类中心的选择和算法终止条件的设定进行深入探讨。
模糊C均值聚类的有效性检验: 探讨如何准确评估聚类结果的性能。
首先定义了聚类效果的评估指标,如轮廓系数和DaviesBouldin 指数,并提出了基于这些指标的聚类有效性检验方法。
案例分析: 通过实际应用案例,展示模糊C均值聚类算法在处理各类复杂数据集时的表现。
案例涵盖了图像分割、文档聚类和生物信息学等领域的数据分析。
应用研究: 探讨模糊C均值聚类算法在不同领域的应用潜力,如金融风控、智能交通和医疗诊断等。
针对特定应用场景,提出了一系列基于模糊C均值聚类的特征选择和降维策略。
结论: 总结研究成果,强调模糊C均值聚类算法在解决实际问题中的有效性和实用性,并指出未来研究方向,旨在进一步完善算法性能并拓展其应用领域。
本研究通过对模糊C均值聚类算法进行系统性的理论分析和案例验证,不仅揭示了其有效的聚类性能,还在多个实际应用领域展现出巨大的潜力和价值。
1.1 背景及意义随着计算机技术的不断发展,数据量呈现爆炸式增长,使得对数据的处理和分析变得越来越重要。
在众多数据处理方法中,聚类作为一种无监督学习方法,被广泛应用于各种领域,如图像处理、模式识别、文档聚类等。
传统的聚类算法如Kmeans、层次聚类等虽已取得一定的应用成果,但往往存在对初始中心点选择敏感、对噪声敏感、局部最优解等问题。
模糊C均值聚类(Fuzzy Cmeans Clustering,简称FCM)是一种基于模糊集理论和传统C均值聚类的改进算法。
复杂网络中的社区发现算法及其应用复杂网络是由大量节点以及节点之间的连接关系构成的网络,在现实中广泛存在于许多领域,如社交网络、生物网络和互联网等。
社区发现是复杂网络研究的重要内容,目的是将网络中相互紧密连接的节点划分为具有相似特征或功能的社区。
社区发现算法是研究者们为了解复杂网络中的结构、功能和演化过程而提出的重要方法。
本文将介绍几种常见的社区发现算法及其应用。
一、模块度优化算法模块度是衡量网络社区结构好坏的重要指标,模块度优化算法就是通过最大化网络的模块度来寻找合适的社区划分。
常见的模块度优化算法有GN算法、Louvain算法和贪心算法等。
这些算法通过迭代地划分社区和优化社区内的连接关系来寻求最优解。
模块度优化算法在社交网络、组织结构分析、蛋白质相互作用网络等领域有广泛应用。
例如,在社交网络中,通过社区发现算法可以识别出不同的社区群体,有助于理解社交网络中的用户行为和信息传播规律,在推荐系统中起到重要作用。
二、基于节点相似性的算法基于节点相似性的社区发现算法认为在网络中相似的节点更可能属于同一个社区。
这类算法包括谱聚类、K均值算法和PSCAN算法等。
这些算法通过计算节点间的相似度来划分社区。
这类算法在生物网络、交通网络、图像分割等领域应用广泛。
例如,在生物网络中,通过基因的相似性来划分蛋白质相互作用网络的社区,可以帮助研究者理解蛋白质之间的功能和调控关系,从而推测未知蛋白质的功能。
三、基于概率生成模型的算法基于概率生成模型的社区发现算法通过建立模型来描述网络的生成过程,并利用模型参数推断网络的社区结构。
常见的算法有LDA、SBM等。
这些算法将网络看作是由不同社区生成的,根据模型参数的估计结果来划分社区。
这类算法在社交网络、金融网络等领域有广泛应用。
例如,在金融网络中,通过基于概率生成模型的社区发现算法可以划分出潜在的金融市场或子市场,有助于金融市场监管和风险预警。
总结起来,社区发现算法在复杂网络研究中扮演重要角色,有助于理解网络的结构和功能特征,为许多现实问题的解决提供了有力支持。
聚类分割算法聚类分割算法是一类常用于将数据集划分成具有相似特征的子集的方法。
这些算法主要用于无监督学习,即在没有先验标签的情况下,自动发现数据集内在的模式。
以下是一些常见的聚类分割算法:1. K均值聚类(K-Means Clustering):- K均值是最常见的聚类算法之一。
它将数据集分为K个簇,每个簇由其质心表示。
算法的目标是使每个数据点到其所属簇的质心的距离最小化。
2. 层次聚类(Hierarchical Clustering):-层次聚类根据数据点之间的相似性构建树状结构。
可以通过聚合或分割来创建簇。
分为凝聚式层次聚类(自底向上)和分裂式层次聚类(自顶向下)。
3. DBSCAN(Density-Based Spatial Clustering of Applications with Noise):- DBSCAN基于密度的聚类算法,能够发现具有足够密度的区域,并将稀疏区域视为噪声。
它不需要预先指定簇的数量。
4. Mean Shift聚类:- Mean Shift是一种基于梯度上升的聚类算法。
它通过不断迭代调整数据点的位置,使其移向密度最大的区域,从而找到簇的中心。
5. OPTICS(Ordering Points To Identify the Clustering Structure):- OPTICS是一种基于密度的聚类算法,类似于DBSCAN,但允许在数据集中存在不同密度的区域,并通过产生一系列密度相关的点来表示簇。
6. 谱聚类(Spectral Clustering):-谱聚类利用数据集的谱信息,通过将数据投影到低维子空间来执行聚类。
它在处理非凸形状的簇和图分割问题时效果较好。
7. 模糊聚类(Fuzzy Clustering):-模糊聚类考虑了数据点与簇的隶属度,而不是将每个数据点硬性地分配到一个簇。
模糊c均值(FCM)是模糊聚类的一个典型算法。
这只是聚类分割算法的一小部分,每个算法都有其适用的场景和限制。
基于改进UNet的脑肿瘤图像分割算法
吴瑜祺;曾志高;朱艳辉;易胜秋;袁鑫攀
【期刊名称】《信息与电脑》
【年(卷),期】2024(36)2
【摘要】脑肿瘤图像采用传统方法难以实现高精度分割,而手动分割图像费时费力,为此提出一种基于改进UNet的脑肿瘤图像分割算法。
首先,在模型的上采样部分嵌入注意力机制,提高主要特征权重;其次,使用迁移学习增强模型泛化能力;最后,进行实验分析。
实验结果表明,该算法在脑肿瘤图像分割上具有更好的效果。
【总页数】5页(P51-55)
【作者】吴瑜祺;曾志高;朱艳辉;易胜秋;袁鑫攀
【作者单位】湖南工业大学湖南省智能信息感知及处理技术重点实验室
【正文语种】中文
【中图分类】TP751
【相关文献】
1.一种改进的I-Unet网络的皮肤病图像分割算法
2.基于Unet的多注意力脑肿瘤图像分割算法
3.改进Unet++在脑肿瘤图像分割的研究
4.基于改进Res-Unet的脑肿瘤核磁图像分割算法
5.基于双解码路径DD-UNet的脑肿瘤图像分割算法
因版权原因,仅展示原文概要,查看原文内容请购买。
信息几何方法及其应用刘淙【摘要】Information geometry is the fundamental and cutting -edge discipline rapidly developed in recent years, which is a new set of theoretical system that explores statistical problems on Riemannian manifolds of prob -ability distributions by using the methods of modern differential geometry .Meanwhile , as an interdisciplinary re-search subject with profound theoretical foundation , information geometry theory provides a new concept for sol-ving statistical problems and a new approach for studying systems theory , information science , neural networks , statistical inference and other research fields .Just because of powerful theory and technology advantages in sol-ving scientific problems with information geometry method , which attracts a lot of researchers and results in a great many of studies in various fields of naturalsciences .Firstly, this article introduces some basic concepts of information geometry , including statistical manifold , Riemannian metric , affine connection and Kullback -Leibler divergence .The two important theorems based on dual flat manifold are also introduced .Then, the new application of information geometry to various areas such as neural networks , statistical inference , systems theo-ry, communications and coding , physics and medical imaging are reviewed .And the research prospect of infor-mation geometry is also discussed in the last .%信息几何是近年来快速发展起来的前沿性基础学科,是在Riemann流形上利用现代微分几何方法研究统计学领域问题而提出的一套新的理论体系.同时,信息几何作为一个具有深刻理论基础的跨学科研究课题,不仅为解决统计学问题引入新的观念,也为系统理论、信息科学、神经网络和统计推断等领域的研究提供新的方法.正是由于信息几何在解决相关领域科学问题时所拥有的强大的理论和技术优势,吸引着众多学者不断探索信息几何在自然科学各个领域的潜在应用.文章首先简要介绍了信息几何理论的一些基本概念,包括统计流形及其上的黎曼度规、仿射联络以及散度的概念,并介绍了对偶平坦流形上两个重要定理;然后,综述了国内外关于信息几何理论在神经网络、统计推断、系统控制理论、物理学、通信编码和医学成像等领域的最新应用进展.最后对信息几何的研究前景进行了展望并总结全文.【期刊名称】《渤海大学学报(自然科学版)》【年(卷),期】2017(038)003【总页数】7页(P199-205)【关键词】信息几何;统计流形;对偶联络;Kullback-Leibler散度【作者】刘淙【作者单位】宝鸡文理学院数学与信息科学学院, 陕西宝鸡721013【正文语种】中文【中图分类】O186信息几何(Information Geometry)作为一门新兴学科正逐步应用于统计推断、系统理论、信息科学、控制理论、神经网络、动力学等各个领域,强大的理论和技术优势使信息几何越来越受到人们的重视.信息几何主要的研究对象是带有随机性的问题,但是某些非随机性问题也可以纳入信息几何的研究范畴.信息几何理论始于统计学家Rao对统计流形的研究,他首次将Fisher信息矩阵定义为流形上的黎曼度规〔1〕.1972年, Chentsov在统计流形上引入仿射联络的概念,奠定了微分几何应用于统计学研究的基础〔2〕.同时,Efron也做了与Chentsov不同的开创性工作,在流形上定义了统计曲率,并证明了统计曲率在统计推断的高阶渐进理论中的基本作用〔3〕.此后,信息几何理论快速发展,基本的理论框架也趋于完善,同时也带动了大量的应用研究.Amari等学者提出统计流形上对偶仿射联络的概念,并证明了单参数的α联络▽(α)和-α-联络▽(-α)关于黎曼度规是对偶的,这一概念的提出在信息几何的理论研究和实际应用中起着至关重要的作用〔4-5〕.经过近几十年的快速发展,信息几何理论和应用研究取得了一些成果,但是该领域的研究仍然处于较浅的层面,一方面需要对信息几何的基础理论继续完善,另一方面则要在统计推断、神经网络和信息科学等应用领域进一步深化研究.本文将对信息几何理论的基本概念及其在神经网络、统计推断、系统控制等领域的成功应用进行概述.1.1 统计流形流形是欧氏空间在更高维度上的推广,而且流形局部具有与欧氏空间相同的拓扑性质,但是比欧氏空间更为复杂.将参数化的概率分布族构成的集合S={p(x|θ)|θ∈Θ⊆Rn}称为统计流形,其中x∈Ω⊆Rm是样本空间X中的m维随机变量,p(x|θ)是X的概率密度函数,且满足正则条件.n维向量θ=(θ1,θ2,…,θn)T∈Θ,Θ是n维实空间Rn中的开集.θ可以看作是该流形S上的坐标.1.2 度规与联络切空间(Tp):流形S在任意点P处的切空间是S在点P周围的局部“线性化”所形成的向量空间,它由通过点P的切向量{e1,e2…,en}组成,如图1所示.当定义了流形S上切空间中两个切向量的内积运算时,流形S被称为黎曼流形.为了使黎曼流形具有一定的运算性质,在流形S上定义黎曼度规和仿射联络等几何结构.在信息几何中,用Fisher信息矩阵(G(θ))=[gi,j(θ)]表示黎曼度规,各分量由(2)式给出:其中,i,j=1,2,3…,n,E表示关于随机变量X的概率密度p(x|θ)的数学期望.度规是用于度量流形上连接两点p(x|θ)和p(x|θ+dθ)之间的距离.因此,流形上两点之间的距离公式表示为:度规描述了流形S上任意点处的局部性质,但是S上不同点处切空间之间并不存在直接关系,为了能够使切空间之间建立起有效联系,便于研究流形整体的几何性质,便引入了“仿射联络”的概念.仿射联络是满足一定条件的双线性映射,为流形S上点θ沿∂i方向变化时,∂j方向上的内蕴变化率,用向量可以表示为:其中是第二类克里斯托夫符号,表示一类仿射联络的系数.仿射联络的定义方式并不唯一,Amari定义了统计流形S上α-联络,α为标量参数,可取任意实数,α-联络表示为:(θ)=Eθ{∂j∂il(x,θ)∂ml(x,θ)}+Eθ{∂jl(x,θ)∂il(x,θ)∂ml(x,θ)}其中∂i=,l(x,θ)=ln p(x|θ),当α=0时为Levi-Civita联络(信息联络),当α=1时为e-联络(指数联络),α=-1时为m-联络(混合联络),α-联络和-α-联络构成一对对偶联络.引入仿射联络后,就可以讨论相应联络的测地线,即满足的曲线θ(t)称为该联络的测地线,相对于α=1时的测地线为e-测地线,α=-1时为m-测地线.也可以通过联络定义曲线的曲率和垂直性,如果该流形上任意点的曲率为零,则该流形为一个平坦流形;如果流形是α-平坦,那么-α-一定也是平坦.1.3 流形的对偶几何结构若流形S具有对偶坐标系并且协变导数总为零,那么这个流形就称为对偶平坦流形.大多数常见的流形已经被Amari证明均是对偶平坦的,在此基础上可以引入两个重要的概念:散度和投影.散度是近似度量两个概率分布p(x|θ1)和p(x|θ2)之间距离的一种方式,对于一个统计流形S,有相应的Kullback-Leibler散度:KLD[p(x|θ1)‖p(x|θ2)]=E{ln p(x|θ1)-ln p(x|θ2)}|θ1)ln ds在对偶平坦流形S中,任意两点P和P′的对偶坐标分别为(θ,η)和(θ′,η′),对偶坐标系θ和η对应的势函数分别为ψ(θ)和φ(η),则散度D(P,P′)也可以定义为:D(P,P′)=ψ(θ)+φ(η′)-θ·η′基于对偶平坦流形上散度的概念,便可以得到广义的Pythagoras定理和投影定理. 定理1 (Pythagoras定理):S是对偶平坦流形,P,Q,R∈S,在S上连接P和Q点的m-测地线和连接Q和R点的e-测地线在Q点处垂直,则有:D(P,Q)+D(Q,R)=D(P,R)定理2 (投影定理):设S为平坦流形,M是S上的一个光滑的闭区域,P∈S是M 外的一个点.则P点在M上的最佳逼近由P点到M的m-测地线投影给出,设此投影点为PM.“最佳逼近”是在散度的意义下使式(9)成立.当M是S上的e-凸流形时该投影是唯一的.信息几何在神经网络、统计推断和系统理论等学科领域的研究中都发挥着重要的作用,而且发展潜力巨大.下面就信息几何在这几个领域的应用进行介绍.2.1 神经网络中的信息几何学信息几何的应用始于随机神经网络的研究工作.Amari教授最先将信息几何方法应用于神经网络数学原理的研究工作中,将人脑的信息过程转变成流形上的几何学问题,这样的处理使研究的对象不只是某一个确定的网络结构,而且是一族神经网络,更有助于发现自然脑固有的性质及其所具有的结构功能.同时,Amari等发现拓扑结构固定的玻尔兹曼机集合构成了一个高维的微分流形,在对该流形的几何结构深入分析的基础上提出了一种新的估计稳定状态算法;对于不带隐单元的玻尔兹曼机构成的微分流形,信息几何理论也证明了该流形具有对偶平坦的几何结构〔6〕.同时,Amari采用e-测地线和m-测地线投影的方法分析一个包含隐单元的神经网络和不完全输入-输出的随机神经网络,这种方法被称为em算法,与统计学中的EM算法类似,并且已经被Amari证明了这两种算法在一定条件下是相同的,二者在解决随机神经网络问题时都具有各自的优缺点〔7〕.为了在弯曲流形上寻优时获得较快的收敛速度,并且在计算最佳梯度方向过程中能够充分考虑流形的几何结构,Amari提出了微分流形上的自然梯度算法〔8〕.随后,Yang在自然梯度的基础上提出了白化梯度的概念,将黎曼流形上的切空间进行白化处理,使得流形上的局部具有欧式空间的性质,从而获得具有更快收敛速度的白化梯度算法〔9〕.Desjardins提出一种Metric-Free自然梯度算法对玻尔兹曼机进行联合训练,利用矩阵向量积可以避免对自然梯度度量的显式存储,并对矩阵向量积进行线性处理使该算法具有更快的收敛速度〔10〕.随着神经网络的发展,新的具有深层次复杂结构的网络随之出现,对于网络的分析也面临新的难题.Sun利用信息几何方法在分析大规模复杂神经网络时,将网络系统划分为若干个局部单元,通过定义这些局部单元的相关Fisher信息度量便能够精确分析流形局部的动态特性,最后利用相关自然梯度得到更好的整体学习性能〔11〕.Zhao在研究玻尔兹曼机的参数约减和模型选择问题时,在流形上建立了可信信息优先原则,用各参数对流形上Fisher信息距离的贡献度来评估各参数的置信度,最大限度保留可信参数以实现参数约减〔12〕.2.2 统计推断中的信息几何方法在分析和处理带有噪声或者随机性的数据时都可以利用信息几何方法,不仅能够使人们更加深刻的理解问题本质,也可以获得分析和解决该类问题的新方法,因此信息几何在统计推断领域中的应用前景最为广阔.Amari将信息几何方法运用于统计推断问题的基础性研究,对多端信息源的假设检验进行了深入的分析,从信息几何角度提出了该假设检验问题的误差指数〔13〕.随后在渐进理论、高阶渐进理论以及半参数模型的统计推断等方面也取得了丰硕的理论成果.信息具有几何学的内涵,使得人们能够更加深刻理解假设检验问题的本质,同时,在此基础上也涌现出许多新的检验算法.Hoeffding将检验统计量表示为由观测样本得到的经验分布为零的KL散度,设计出一种通用假设检验算法〔14〕.Unnikrishnan基于松弛KL分散度改进了Hoeffding检验算法并取得良好的效果,该检验算法利用失配散度对有限维表征的备选假设进行假设检验〔15〕.Mehrali定义了连续随机变量的最小累积KL散度估计算法(MCKLE),该算法具有渐进的置信区间和假设检验特性〔16〕.当前,模型选择问题的研究主要集中在模型推广度的几何度量和模型拟合的信息几何方法研究等方面.其中,罗四维利用信息几何中的Gauss-Kronecher曲率在研究模型选择问题的固有复杂度方面取得了突出成果〔17〕.Hajri将信号处理中复杂的协方差矩阵空间视为黎曼流形,定义了流形上的Riemannian- Gaussian分布,该分布仅包含质心和扩散度两个参数,利用EM算法能够快速进行模型选择〔18〕.关于模式分析和聚类的信息几何学研究,则是利用微分流形上测地线的概念,从本质上揭示各点的几何位置关系,使得相似度的度量更加有效,已经在图像分割与聚类、模式识别等领域开展了相关的研究工作.Li为了能够高效解决线性动态系统中的个体行为识别,将该动态系统抽象为Grassmann/Stiefel流形,并提出用超球面流形上的判别增量学习算法来实现群组运动识别〔19〕.Wang进行图像分割时提出一种结构敏感的过分割算法,利用测地线距离将过分割过程描述成一类软聚类问题,通过几何流形可以获得局部最优解〔20〕.陈莹兰则用测地线距离表示超像素间的空间相关性,并且构建了一个集成颜色特征和测地线特征的相似度矩阵,利用谱聚类算法对该相似度矩阵进行谱分解得到最终的图像分割结果〔21〕.2.3 信息几何在系统控制中的应用相比于线性系统,非线性系统的控制问题更加复杂,系统所处理的对象通常只是一些低维流形,将信息几何的方法应用于非线性系统,可以将非线性控制系统的研究转化为流形上的切向量场及其分布的研究,从而使非线性控制系统的研究取得新的突破.Amari在系统控制的研究中最先采用信息几何理论,基于微分流形研究了一个单输入单输出的极小相位系统的几何结构,并得到了良好的结果〔22〕.Ohara同样采用信息几何学方法对带有状态反馈增益的线性常定系统的几何结构进行了深入的分析和研究〔23〕.孙华飞分别研究了带状态反馈的线性时变系统、带有输出反馈增益的线性常定系统以及带有输出反馈增益的线性时变系统的几何结构,从信息几何的角度研究了随机系统的分布控制问题,设计了调节随机系统输入的算法,使得系统输出与已知的概率密度函数更加接近,取得了良好的系统控制效果〔24〕.随后,Zhang利用随机分布式控制系统的统计特征,在信息几何学的框架下,基于自然梯度算法提出最速下降算法来控制输出概率密度函数的形状,成功地克服了最小方差仅能研究高斯型随机控制系统的局限〔25〕.关于线性系统的稳定性问题,Duan将该问题归结为对于给定的一个正定矩阵,在黎曼流形的几何结构上求解一个离散代数Lyapunov方程,并利用自然梯度的迭代方法求解该方程的数值解,算法具有迭代步骤少等特点〔26〕.对于一个线性系统,为了能够获得系统的最优控制,通常在给定目标函数情况下,寻找系统输入使得目标函数能够取到最优值,可以将该问题归结为求解Riccati方程,Luo分析了如何在流形上求解Riccati方程,并给出了线性系统最优控制的几何算法〔27〕.2.4 信息几何在其他领域的应用作为信息与几何相结合而建立的具有深厚的理论基础的跨学科课题,信息几何不仅深刻应用于统计学、神经网络、控制理论等基础学科,而且在物理学、医学、编码理论与经济学等相关领域都有着非常广泛的应用前景.信息几何方法为很多物理学问题的研究提供了理论支持,Portesi在定义了热力学流形黎曼度规分量的基础上,深入研究了热力学的几何结构〔28〕,曹丽梅对热力学流形上的α-联络进行了深入研究,给出了联络系数〔29〕;同样信息几何在量子力学领域也得到了广泛的应用〔30-32〕.Bell实验室的Richardson关于Turbo编解码算法所做的几何学研究工作开启了信息几何在通信与编码领域的研究〔33〕;随后,Amari等在研究低密度奇偶校验码时将对偶仿射联络应用其中拓宽了Richardson关于编码的几何结构〔34〕;其他通信方面的成果还包括从信息几何角度出发对无线传感器网络中目标跟踪与检测的研究〔35-36〕.近年来,医学成像方面,在分析和处理弥散张量成像时,应用多变量正态分布的协方差矩阵表示弥散张量,该张量的估计、统计分析则是基于矩阵空间上黎曼度规及测地线距离实现的〔37-39〕.另外,信息几何理论也被应用于研究金融学中,将金融中具有不确定性的因素进行建模,利用信息几何方法研究所建立的统计模型在流形上的几何性质,从而可以更加直观的分析经济学中利息率与股票收益率等的变化规律〔40-42〕.信息几何自上世纪八十年代末逐渐形成一门跨学科的理论体系,在理论研究和应用方面都取得了快速的发展.原则上信息论、统计学等学科领域中带有随机性的问题都可以利用信息几何的方法有效解决,甚至许多非随机性问题也可以纳入信息几何方法的应用范围.但是,信息几何发展时间较短,基本理论框架仍然有待研究者进行完善.同时,微分几何中丰富的理论工具尚未在信息几何中得到充分的使用,例如Lie群、Lie代数方法、纤维丛理论等工具还没有发挥有效的作用,因此信息几何的理论和应用价值尚未得到充分的开发.文章首先介绍了信息几何一些基本概念和重要定理,使人们能够快速的认识和了解这一重要理论方法,然后归纳总结了信息几何方法在不同领域中的应用,可以看出信息理论与几何学相结合的方法逐步受到人们的重视,在各个领域的应用也显示出信息几何所蕴含的强大生命力.【相关文献】〔1〕RAO C R. Information and accuracy attainable in the estimation of statistical parameters〔J〕. Bull Calcutta Math Soc, 1945, 37(5): 81-91.〔2〕CHENTSOV N N. Statistical decision rules and optimal inference〔R〕. Rhode Island: American Mathematical Society, 1982.〔3〕EFRON B. Defining the curvature of a statistical problem (with applications to second order efficiency)〔J〕. Annals of Statistics, 1975, 3(6): 1189-1242.〔4〕AMARI S, NAGAOKA H. Method of information geometry〔M〕. New York: Oxford University Press, 2000.〔5〕AMARI S. Differential-geometrical methods in statistics〔J〕. Lecture Notes in Statistics, 1985, 28(5):168-178.〔6〕AMARI S, KURATA K, NAGAOKA H. Information geometry of Boltzmann machines 〔J〕. IEEE Transactions on Neural Networks, 1992, 3(2): 1243-1255.〔7〕AMARI S. Information geometry of the EM and em algorithms for neural networks 〔J〕. Neural Networks, 1995, 8(9): 1379-1408.〔8〕AMARI S. Natural gradient works efficiently in learning〔J〕. Neural Computation, 1998, 10(2): 251-276.〔9〕YANG Z, LAAKSONEN J. Principal whitened gradient for information geometry〔J〕. Neural Network, 2008, 21(2): 232-240.〔10〕DESJARDINS G, PASCANU R, COURVILE A, et al. Metric-free natural gradient for joint-training of Boltzmann machines〔J〕. Computer Science, 2013, 13(4): 1-7.〔11〕SUN K, NIELSEN F. Relative natural gradient for learning large complex models〔J〕. ArXiv Preprint ArXiv: 1606.06069, 2016.〔12〕ZHAO X, HOU Y, SONG D, et al. A confident information first principle for parameter reduction and model selection of Boltzmann machines〔J〕. IEEE Transactions on Neural Networks and Learning Systems, 2017, 99: 1-14.〔13〕AMARI S, HAN T S. Statistical inference under multiterminal rate restrictions: A differential geometric approach〔J〕. IEEE Transactions on Information Theory, 1989,35(2): 217-227.〔14〕HOEFFDING W. Asymptotically optimal tests for multinomial distributions〔J〕. The Annals of Mathematical Statisticst, 1965. 36: 369-408.〔15〕UNNIKRISHNAN J, BALASUBRAMANIAN V, PITT M A. Universal and composite hypothesis testing via mismatched divergence〔J〕. IEEE Transactions on Information Theory, 2011, 57 (3): 1587-1603.〔16〕MEHRALI Y, ASADI M. Parameter estimation based on cumulative Kullback-Leibler divergence〔J〕. ArXiv Preprint arXiv: 1606.09288, 2016.〔17〕吕子昂, 罗四维, 杨坚. 模型的固有复杂度和泛化能力与几何曲率的关系〔J〕. 计算机学报, 2007, 30(7): 1094-1103.〔18〕HAJRI H, SAID S, BOMBRUN L, BERTHOUMIEU Y. A geometric learning approach on the space of complex covariance matrices〔C〕. IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). New Orleans: LA, 2017.〔19〕LI R, TURAGA P, SRIVASTAVA A, et al. Differential geometric representations and algorithms for some pattern recognition and computer vision problems〔J〕. Pattern Recognition Letters, 2014, 43(1): 3-16.〔20〕WANG P, ZENG G, WANG P, et al. Structure-sensitive superpixels via geodesic distance〔J〕. International Journal of Computer Vision, 2013, 103(1): 1-21.〔21〕陈莹兰, 陈秀宏. 基于测地线的超像素谱聚类彩色图像分割〔J〕. 计算机工程与应用, 2015,51(23): 155-159.〔22〕AMARI S. Differential geometry of a parametric family of invertible linear systems-Riemannian metric connections and divergence〔J〕. Mathematical System, 1987, 20(7): 53-82.〔23〕OHARA A, KITAMORI T. Geometric structures of stable state feedback systems〔J〕. IEEE Transactions on Automatic Control, 1993, 38: 1579-1583.〔24〕ZHONG F, SUN H, ZHANG Z. An information geometry algorithm for distribution control〔J〕. Bullstin of the Brazilian Mathematical Society New, 2008, 39(1): 1-10. 〔25〕ZHANG Z, SUN H, PENG L. Natural gradient algorithm for stochastic distribution systems with output feedback〔J〕. Differential Geometry & Its Applications, 2013, 31(5): 682-690.〔26〕DUAN X, SUN H, PENG L, et al. A natural gradient descent algorithm for the solution of discrete algebraic Lyapunov equations based on the geodesic distance〔J〕. Applied Mathematics and Computation, 2013, 219(19): 9899-9905.〔27〕LUO Z, SUN H, DUAN X. The extended hamiltonian algorithm for the solution of the algebraic Riccati equation〔J〕. Journal of Applied Mathematics, 2014, 16(7): 1-8. 〔28〕PORTESI M, PLASTINO A, PENNINI F. Information geometry and phase transitions 〔J〕. International Journal of Mordern Physics B, 2006, 20: 5250-5253.〔29〕CAO L M, SUN H F, WU L P. Infromation geometry of the thermodynamic manifold 〔J〕. Nuovo Cimento B, 2008, 123(3): 593-598.〔30〕ZHANG Z, SUN H, PENG L. Natural gradient algorithm for stochastic distribution systems with output feedback〔J〕. Differential Geometry & Its Applications, 2013, 31(5): 682-690.〔31〕DUAN X, SUN H, PENG L, et al. A natural gradient descent algorithm for the solution of discrete algebraic Lyapunov equations based on the geodesic distance〔J〕. Applied Mathematics and Computation, 2013, 219(19): 9899-9905.〔32〕LUO Z, SUN H, DUAN X. The extended hamiltonian algorithm for the solution of the algebraic Riccati equation〔J〕. Journal of Applied Mathematics, 2014, 25(7): 1-8 〔33〕RICHARDSON T. The geometry of turbo-decoding dynamics〔J〕. IEEE Transactions on Information Theory, 2000, 46(1): 9-23.〔34〕IKEDA S, TANAKA T, AMARI S. Information geometry of turbo and low-density parity-check codes〔J〕. IEEE Transactions on Information Theory, 2004, 20(6): 1097-1114. 〔35〕CHENG Y, WANG X, MORELANDE M, et al. Information geometry of target tracking sensor networks〔J〕. Information Fusion, 2013, 14(3): 311-326.〔36〕TANG M, RONG Y, ZHOU J. An information geometric viewpoint on the detection of range distributed targets〔J〕. Mathematical Problems in Engineering, 2015, 17(3): 1-9. 〔37〕LENGLET C, ROUSSON M, DERICHE R. Statistics on the manifold of multivariate normal distributions: theory and application to diffusion tensor MRI processing〔J〕. Journal of Mathematical Imaging and Vision, 2006, 25: 423-444.〔38〕KAI K, MENZEL M, SCHARR H. A Riemannian bayesian framework for estimating diffusion tensor images〔J〕. International Journal of Computer Vision, 2016, 120(6): 1-28. 〔39〕FAROOQ H, CHEN Y, GEORGIOU T, et al. Some geometric ideas for feature enhancement of diffusion tensor fields, IEEE 55th Conference on Decision and Control (CDC), December 12-16,2016〔C〕. Las Vegas, IEEE, 2016,3856-3861.〔40〕BRODY D C, HUGHSTON L P. Interest rates and information geometry〔J〕. Proceedings of the Royal Society London A, 2001, 457(17): 1343-1363.〔41〕BRODY D, HUGHSTON L. Interest rates and information geometry〔J〕. Proceedings of the Royal Society A Mathematical Physical & Engineering Sciences, 2011, 457(2010):1343-1363.〔42〕LIM N, PRVAULT N. Analytic bond pricing for short rate dynamics evolving on matrix Lie groups〔J〕. Quantitative Finance, 2016, 16(1):119-129.。
ostu法计算阈值OSTU法是一种常用的图像分割方法,用于将图像分成两个部分:前景和背景。
本文将介绍OSTU法的原理和计算阈值的步骤。
一、OSTU法的原理OSTU法是基于图像的灰度直方图的分析来确定阈值的。
它的基本思想是使得图像的前景和背景之间的类间方差最大化,即使得前景和背景之间的差异最大化。
二、计算阈值的步骤1. 首先,读取图像并将其转换为灰度图像。
通过将彩色图像转换为灰度图像,可以简化计算并减少计算量。
2. 然后,计算灰度图像的直方图。
直方图表示了图像中每个灰度级的像素数量。
3. 接下来,计算每个可能的阈值下的类内方差。
类内方差是指在某个阈值下,将图像分成前景和背景两部分后,前景和背景内部的像素灰度值的方差之和。
4. 然后,计算每个可能的阈值下的类间方差。
类间方差是指在某个阈值下,将图像分成前景和背景两部分后,前景和背景之间的像素灰度值的方差。
5. 最后,选取使得类间方差最大化的阈值作为最终的分割阈值。
三、OSTU法计算阈值的优势OSTU法计算阈值的优势在于它能够自动选择最佳的阈值,而无需用户进行手动调整。
这一点尤其适用于大量图像的处理和分割任务。
四、OSTU法的应用领域OSTU法广泛应用于图像处理和计算机视觉领域。
例如,它可以用于图像分割、边缘检测、目标识别等任务中。
在医学影像领域,OSTU法也常用于肿瘤分割、血管分割等应用中。
五、OSTU法的局限性虽然OSTU法在很多情况下表现良好,但它也有一些局限性。
首先,OSTU法假设图像的前景和背景之间的差异是明显的,但在一些复杂的图像场景中,前景和背景之间的差异可能较小。
其次,OSTU 法对噪声敏感,当图像包含大量噪声时,OSTU法可能产生错误的分割结果。
六、总结OSTU法是一种常用的图像分割方法,通过使得图像的前景和背景之间的类间方差最大化来确定阈值。
它具有自动选择最佳阈值的优势,并广泛应用于图像处理和计算机视觉领域。
然而,OSTU法也有一些局限性,需要根据具体的应用场景进行选择和调整。
基于NODE-UNet++和标记分水岭算法的红细胞图像分割荣亚琪;张丽娟;崔金利;苏伟;盖梦野【期刊名称】《液晶与显示》【年(卷),期】2022(37)9【摘要】对血液涂片图像中的红细胞进行精确分割是一项重要的技术,也是一个难题,主要是因为红细胞经常重叠,没有明显边界。
针对此问题,本文提出一种基于U-Net++和神经常微分方程(Neural Ordinary Differential Equations,NODE)的深度学习网络NODE-UNet++用于红细胞的初步分割,再利用标记分水岭算法分割血液涂片图像中的粘连红细胞。
首先对图像进行裁剪和标注,突出待分割区域;然后应用新的语义分割体系结构NODE-UNet++对预处理后的图像进行初始分割得到概率灰度图;最后采用标记分水岭算法将灰度图中的粘连红细胞分离,得到最终红细胞分割结果图。
实验结果表明,Dice系数达到96.89%、平均像素准确率达到98.97%、平均交并比达到96.33%。
通过对不同血液涂片图像的分割结果表明,该方法能高效精确地提取每个红细胞,满足后续红细胞图像处理的需求。
【总页数】9页(P1190-1198)【作者】荣亚琪;张丽娟;崔金利;苏伟;盖梦野【作者单位】吉林农业大学信息技术学院;长春工业大学计算机科学与工程学院;长春中医药大学附属医院医药影像科;长春中医药大学医药信息学院【正文语种】中文【中图分类】TP391【相关文献】1.基于标记提取分水岭算法的医学图像分割2.标记分水岭算法及区域合并的遥感图像分割3.基于标记分水岭算法的高分辨率遥感图像分割方法4.基于距离变换和分水岭算法的图像分割研究5.基于标记分水岭算法的图像分割技术因版权原因,仅展示原文概要,查看原文内容请购买。