机械原理 西工大第八版第3.2节 用矢量方程图解法作运动分析
- 格式:ppt
- 大小:2.18 MB
- 文档页数:43
![[机械原理]图解-平面机构的运动分析_OK](https://uimg.taocdn.com/5b573bf46bd97f192379e94b.webp)
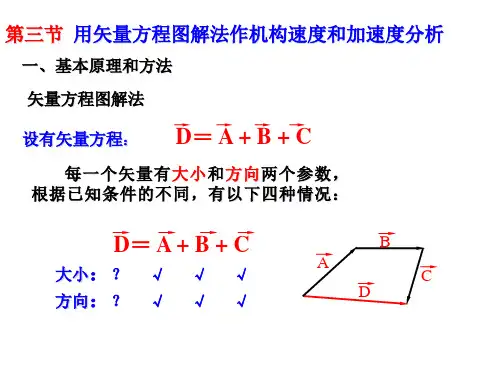
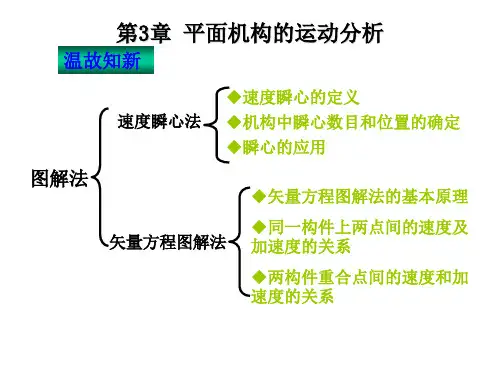
《机械原理》第三章平面机构运动分析——矢量方程图解法对机构运动分析(1)矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系ω1A D C1432B C B CB v v v =+2121C C C C v v v =+矢量方程图解法(相对运动图解法)依据的原理理论力学中的运动合成原理同一构件两点间的运动关系两构件重合点间的运动关系1、根据运动合成原理列出矢量方程2、根据矢量方程图解条件作图求解基本作法二、同一构件两点间的运动分析运动合成原理:连杆上任一点(如C 点)的运动,可以看作是随同该构件上另一点B 的平动(牵连运动)和绕该点的转动(相对运动)的合成。
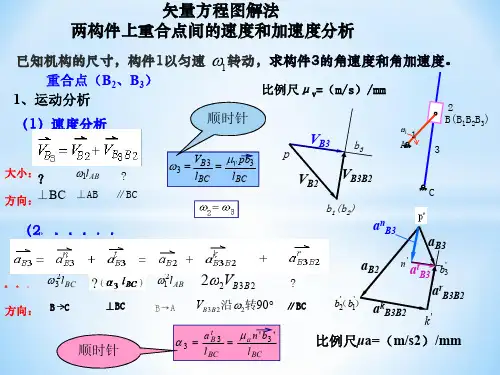
已知图示曲柄滑块机构原动件AB 的运动规律和各构件尺寸。
求:①图示位置连杆BC 的角速度和其上各点速度。
②连杆BC 的角加速度和其上C 点加速度。
理论力学大小:方向:?ω1l AB ?∥xx ⊥AB ⊥BC cp★求V C①由运动合成原理列矢量方程式CB B C v v v +=v B ω2②确定速度图解比例尺μv ( (m/s)/mm)/B v pb v μ=b2CB CB l ω=v (逆时针方向)2CB CBl ω=v C v v pc μ=CB v v bc μ=③作图求解未知量:大小:方向:c p★求V Ev B ω2bE v v peμ=?√ ??⊥AB ⊥EBE B EB v v v =+C EC v v =+∥xx ⊥EC √ ?e 速度多边形极点m/sc pv B ω2be 速度多边形极点①由极点p 向外放射的矢量代表相应点的绝对速度,极点p 的速度为零;②连接极点以外其他任意两点的矢量代表构件上相应两点间的相对速度,其指向与速度的下角标相反;③因为△BCE 与△bce 对应边相互垂直且角标字母顺序一致,故相似,所以图形bce 称之为图形BCE 的速度影像。
CB B C v v v +=C v v pc μ=速度影像。
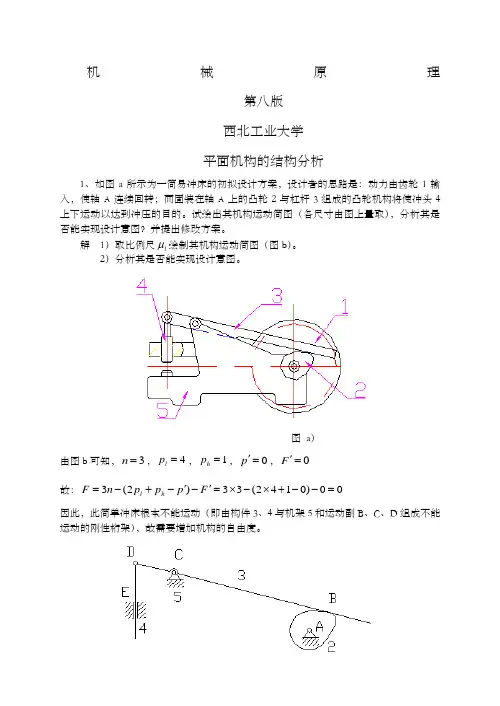
机械原理第八版 西北工业大学平面机构的结构分析1、如图a 所示为一简易冲床的初拟设计方案,设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析其是否能实现设计意图?并提出修改方案。
解 1)取比例尺l μ绘制其机构运动简图(图b )。
2)分析其是否能实现设计意图。
图 a ) 由图b 可知,3=n ,4=l p ,1=h p ,0='p ,0='F 故:00)0142(33)2(3=--+⨯-⨯='-'-+-=F p p p n F h l因此,此简单冲床根本不能运动(即由构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架),故需要增加机构的自由度。
图 b )3)提出修改方案(图c )。
为了使此机构能运动,应增加机构的自由度(其方法是:可以在机构的适当位置增加一个活动构件和一个低副,或者用一个高副去代替一个低副,其修改方案很多,图c 给出了其中两种方案)。
图 c1) 图 c2)2、试画出图示平面机构的运动简图,并计算其自由度。
图a )解:3=n ,4=l p ,0=h p ,123=--=h l p p n F图 b )解:4=n ,5=l p ,1=h p ,123=--=h l p p n F3、计算图示平面机构的自由度。
将其中的高副化为低副。
机构中的原动件用圆弧箭头表示。
3-1解3-1:7=n ,10=l p ,0=h p ,123=--=h l p p n F ,C 、E 复合铰链。
3-2解3-2:8=n ,11=l p ,1=h p ,123=--=h l p p n F ,局部自由度3-3 解3-3:9=n ,12=l p ,2=h p ,123=--=h l p p n F4、试计算图示精压机的自由度解:10=n ,15=l p ,0=h p 解:11=n ,17=l p ,0=h p13305232=⨯-+⨯='-'+'='n p p p h l 26310232=⨯-⨯='-'+'='n p p p h l0='F 0='FF p p p n F h l '-'-+-=)2(3 F p p p n F h l '-'-+-=)2(310)10152(103=--+⨯-⨯= 10)20172(113=--+⨯-⨯=(其中E 、D 及H 均为复合铰链) (其中C 、F 、K 均为复合铰链)5、图示为一内燃机的机构简图,试计算其自由度,并分析组成此机构的基本杆组。