多功能智能网球捡球机的设计
- 格式:doc
- 大小:2.37 MB
- 文档页数:21

网球发球机毕业设计网球发球机毕业设计毕业设计是每个大学生必须完成的一项任务,它不仅是对所学知识的综合运用,更是对自己能力的一次考验。
在选择毕业设计题目时,我对网球产生了浓厚的兴趣,因此决定以网球发球机为主题进行研究和设计。
一、背景介绍网球作为一项受欢迎的运动项目,发球是比赛中最重要的环节之一。
然而,由于发球的技术要求较高,对球员的力量、技巧和稳定性都有很高的要求。
因此,设计一款能够模拟球员发球动作的机器,不仅可以提高训练效果,还可以帮助初学者掌握正确的发球姿势和动作。
二、设计目标1. 模拟球员发球动作:通过精确的机械结构和控制系统,实现机器模拟球员的发球动作,包括起球、挥拍、击球等环节。
2. 可调节发球速度和角度:根据用户的需求,设计机器可以灵活调节发球的速度和角度,以适应不同水平的球员和训练要求。
3. 自动反馈和调整:机器能够自动检测发球的质量和效果,并根据反馈信息进行调整,以提高训练效果和球员的技术水平。
三、设计原理1. 机械结构:设计一个能够模拟球员发球动作的机械臂,通过电机和传动装置实现起球、挥拍和击球的动作。
机械臂的结构应该稳定可靠,能够承受高速运动和重复冲击。
2. 控制系统:采用单片机或者嵌入式系统作为控制核心,通过编程控制机械臂的运动轨迹和速度。
同时,设计传感器用于检测发球的质量和效果,通过反馈信息调整发球参数。
3. 调节系统:设计一个可调节的装置,通过改变机械臂的角度和位置,实现发球速度和角度的调节。
这个装置可以通过手动或者电动的方式进行操作,以满足不同训练需求。
四、技术挑战与解决方案1. 动作模拟:模拟球员的发球动作是设计中最大的挑战之一。
通过研究球员的发球动作和运动规律,设计合理的机械结构和控制算法,以实现高度还原球员的发球动作。
2. 发球速度和角度调节:通过电机和传动装置的设计,实现发球速度和角度的调节。
同时,通过编程控制机械臂的运动轨迹和速度,实现精确的发球参数调节。
3. 自动反馈和调整:设计传感器用于检测发球的质量和效果,通过反馈信息调整发球参数。

乒乓球捡球器的设计原理一、引言乒乓球捡球器是一种自动化设备,用于在乒乓球比赛中捡取球。
它能够提高比赛效率,减少人工捡球的时间和精力。
本文将详细介绍乒乓球捡球器的设计原理,包括机械结构、电力驱动、控制系统、传感器技术和人工智能技术等方面。
二、机械结构乒乓球捡球器的机械结构主要由捡球机构和移动机构组成。
捡球机构采用旋转式设计,通过电机驱动旋转,将乒乓球捡起并放入收集箱。
移动机构采用轮式设计,通过电机驱动轮子,实现捡球器的移动和定位。
同时,机械结构还需要考虑球的大小和形状等因素,以确保捡球器的准确性和稳定性。
三、电力驱动乒乓球捡球器的电力驱动主要采用直流电机驱动。
直流电机具有调速性能好、控制精度高等优点,能够满足捡球器对速度和精度的要求。
同时,直流电机还具有体积小、重量轻等优点,能够降低捡球器的整体重量和体积。
四、控制系统乒乓球捡球器的控制系统主要采用单片机或PLC等控制芯片实现。
控制系统需要实现以下功能:1.电机控制:通过控制电机的速度和方向,实现捡球器的移动和旋转。
2.传感器信号处理:通过传感器检测乒乓球的位置和数量等信息,并将信息传递给控制系统进行处理。
3.人工智能算法实现:通过人工智能算法实现对乒乓球的识别和预测,提高捡球的准确性和效率。
五、传感器技术乒乓球捡球器采用传感器技术进行检测和识别。
主要包括以下几种传感器:1.超声波传感器:通过发射超声波并接收反射波来判断乒乓球的位置和距离等信息。
2.红外线传感器:通过检测乒乓球的红外辐射来判断其位置和存在等信息。
3.摄像头传感器:通过拍摄图片或视频等方式来识别乒乓球的数量和颜色等信息。
六、人工智能技术乒乓球捡球器采用人工智能技术进行识别和预测。
主要包括以下几种技术:1.图像识别技术:通过训练神经网络等算法实现对乒乓球的识别和分类。
2.机器学习技术:通过训练数据模型来提高对乒乓球的识别和预测能力。
3.深度学习技术:通过建立深度神经网络模型来实现对乒乓球的更准确识别和预测。

2015-1-29机械原多功能网球发球机原理设计理课程设计组长:组员:目录需求分析结果————————————————————————————2功能要求——————————————————————————————4功能原理设计————————————————————————————4运动规律设计———————————————————————————101.给球连杆机构—————————————————————————102.定位加转机构—————————————————————————123.下层摇转机构—————————————————————————144.击球机构———————————————————————————185.防堵球机构——————————————————————————206.传动系统设计—————————————————————————21最终效果展示———————————————————————————24课程设计的感想和总结———————————————————————25参考文献—————————————————————————————26多功能网球发球机机械系统原理方案设计一、需求分析结果。
网球起源于法国,现在已经成为全世界最流行的球类运动之一,深受广大运动爱好者的喜爱。
但是作为一个对抗性的运动,当你只有一个人的时候或者是需要一个稳定的对手来练习的时候,就会显得十分尴尬,而网球发球机的出现,极大程度上解决了类似的问题。
尽管可能无法获得如同与人对抗时的乐趣,但对于技术的提高与自身的锻炼还是有很大的帮助的。
当前最主流的网球发球机是靠两个轮子的相对旋转时挤压网球将网球打出。
它们在前部都有个出球口,通过出球口可以看见两个轮子,就是这两个由电机带动的轮子通过快速旋转将球挤压射出。
通过上下两个轮子的不同的旋转速度可以把球挤出时产生可以调整的上旋或下旋。
目前市场同类产品中较为常见的有以下两种:TUTOR-03网球发球机球容量:125个球道高度控制:平击球至高吊球最大球速:136公里/小时发球频率:1.5-10秒发球方向控制:双线摇摆,随机摇摆电池款使用时间:3-4小时尺寸:50CM长x 51CM宽x 30CM高重量:19 公斤斯波阿斯SS-3033微电脑智能网球发球机训练机可调发球速度30—150公里/小时,可调出球频率2—12秒/球此两种是市场上较为常见的两种网球发球机,他们都有共同的问题,那就是不够灵活,不能够完美的按照用户需求进行发球,发球线路较为单一,且由于用到了单片机控制电路,导致造价昂贵,售价也是让人望而却步。

全向移动功能的篮球机器人的机械系统设计毕业论文目录绪论 (1)0.1 移动机器人现状与技术水平 (1)0.2 移动机器人机构研究概况 (1)0.3毕业设计来源及参赛意义 (2)0.4毕业设计的设计方法、主要任务及目标 (2)1 全维轮移动篮球机器人机械系统设计整体方案 (4)1.1机器人整体结构方案 (4)2 移动平台设计 (7)2.1移动机器人的运动方式 (7)2.1.1差动运动方式 (7)2.1.2全运动方式 (8)2.1.3选择全向运动方式 (8)2.2 全向轮的选择 (9)2.2.1 全向轮的介绍: (9)2.2.2全向轮的选型 (10)2.3电动机的选择 (12)2.3.1 直流电机的选取与计算 (13)2.4其他部件的选择校核 (17)2.4.1电机支撑架的选择 (17)2.4.2轴承的选择及校核 (17)2.4.3底盘设计 (18)2.4.4阶梯轴的设计 (18)2.5电机与轮的装配 (19)3 捡球机构的设计 (20)3.1电机的选择及计算 (20)3.1.1所需转矩计算 (20)3.2 齿轮的选择及校核 (22)3.3 插架的设计 (23)3.4 传动轴的设计 (24)3.5捡球机构装配 (25)4 弹射机构设计 (26)4.1 投篮速度的选取与计算 (26)4.2气缸的选择 (27)4.3 导行架的设计 (28)4.3弹射机构的装配 (29)5 全维轮移动篮球机器人机械结构装配及总结 (30)5.1 全维轮移动篮球机器人机械结构 (30)5.2设计总结 (31)参考文献 (33)致谢 (34)绪论0.1 移动机器人现状与技术水平机器人的最初形式是工业机器人,它能有效的提高产品的质量和改善人们的劳动条件,在焊接装配、浇铸、喷漆等方面得到了广泛应用。
工业机器人通常为多关节的机械手臂,本体不具有可移动性,因而工作环境相对来说是固定的,其灵活性只表现在可以按照人们的要求反复编程实现不同的运动。

乒乓球捡球机器人的设计与实现乒乓球是一项广受欢迎的体育运动,对于提高反应速度和手眼协调能力有很大帮助。
然而,乒乓球比赛中会产生大量的乒乓球,这些球的捡拾和整理是一项耗时耗力的任务。
为了解决这个问题,我们可以设计一款乒乓球捡球机器人,以实现快速、准确的捡球目标。
机械结构乒乓球捡球机器人应具备一个可以容纳多个乒乓球的容器,通常可以设计成一个可旋转的圆盘或是一个可以伸缩的抽屉。
圆盘的表面可以有一些特殊的纹理或结构,以帮助固定乒乓球。
在圆盘的下方,可以设置一个或多个小型旋转电机,以帮助圆盘快速旋转。
当电机接收到捡球指令时,电机带动圆盘旋转,将乒乓球送入圆盘的中心孔洞中。
控制系统捡球机器人的控制系统应该包括一个主控制器和多个传感器。
主控制器负责接收用户的指令并控制捡球机器人的动作。
传感器则负责检测乒乓球的位置和数量。
控制系统应当能够根据传感器检测到的信息,自动调整机器人的捡球策略。
例如,当圆盘内的乒乓球数量达到一定阈值时,控制系统应当能够自动暂停圆盘的旋转,以防止乒乓球掉出圆盘。
视觉系统为了实现准确的捡球,捡球机器人还应该配备一个视觉系统。
视觉系统包括一个高分辨率摄像头和一个图像处理器。
摄像头负责拍摄乒乓球场的全景图像,并将图像数据传输给图像处理器。
图像处理器则负责分析图像数据,识别并定位乒乓球的位置。
通过视觉系统的帮助,捡球机器人可以更加准确地找到乒乓球,从而提高捡球效率。
机械设计首先需要设计机器人的机械结构。
考虑到乒乓球的尺寸和重量,我们需要为机器人设计一个能够容纳足够多乒乓球的容器。
乒乓球是一项广受欢迎的体育运动,对于提高反应速度和手眼协调能力有很大帮助。
然而,乒乓球比赛中,捡球是一项耗时且耗费体力的任务。
为了解决这个问题,本文介绍了一种智能乒乓球自动捡球机器人的设计与实现。
该机器人主要由红外传感器、微型处理器、机械手臂、球仓等组成。
机器人通过红外传感器检测乒乓球的位置,将信息传递给微型处理器进行分析。
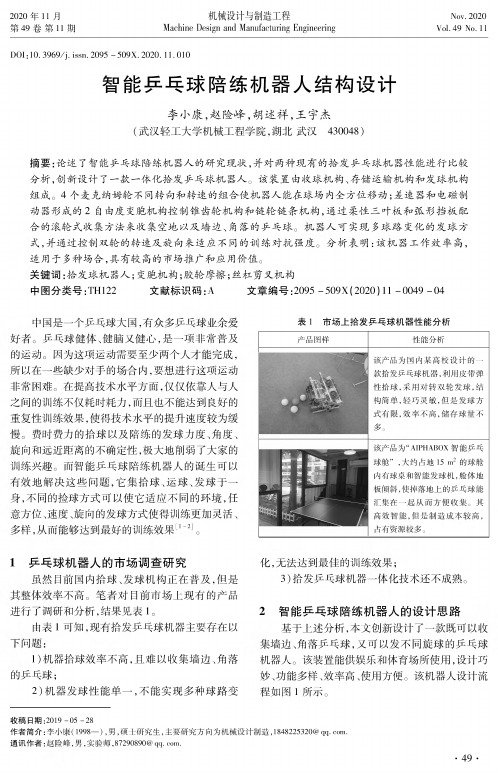
机械设计与制造工程Machine Design and Manufacturing Engineering 2020年11月第49卷第11期Nov. 2020Vol. 49 No. 11DOI : 10. 3969/j. issn. 2095 - 509X. 2020.11.010智能乒乓球陪练机器人结构设计李小康,赵险峰,胡述祥,王宇杰(武汉轻工大学机械工程学院,湖北武汉430048)摘要:论述了智能乒乓球陪练机器人的研究现状,并对两种现有的拾发乒乓球机器性能进行比较 分析,创新设计了一款一体化拾发乒乓球机器人。
该装置由收球机构、存储运输机构和发球机构组成。
4个麦克纳姆轮不同转向和转速的组合使机器人能在球场内全方位移动;差速器和电磁制动器形成的2自由度变胞机构控制锥齿轮机构和链轮链条机构,通过柔性三叶板和弧形扌当板配 合的滚轮式收集方法来收集空地以及墙边、角落的乒乓球。
可实现多球路变化的发球方式,并通过控制双轮的转速及旋向来适应不同的训练对抗强度。
分析表明:该机器工作效率高,于多种场合,具有较高的市场和。
关键词:拾发球机器人;变胞机构;胶轮摩擦;丝杠剪叉机构中图分类号:TH122文献标识码:A文章编号:2095 -509X (2020) 11 -0049 -04中国是一个乒乓球大国,有众多乒乓余爱&乒乓 、健脑 心,是一项非常普及的运动。
因项运动需要至少两个人完成,所以在对手的内,要想进行这项运动非常困难。
在提高技术 方面,仅仅 人与人之间的训练不仅耗时,达到良好的重复性训练 , 技术 的提升速度 缓& 时 的拾 及陪练的 度、角度、向和远近距离的性,极大地削弱了大家的训练兴趣。
而智乒乓球陪练机器人的诞生可以地,它拾球、运、 于身,不同的捡球方式可它 同的 ,任方位、速度、旋向的 方式 训练更加灵活、多样, 达到最好的训练'1'2(&表1市场上拾发乒乓球机器性能分析产品图样性能分析该产品为国内某高校设计的一 款拾发乒乓球机器,利用皮带弹性拾球,采用对转双轮发球,结 构简单,轻巧灵敏,但是 方式 ,效率不高,储存球量不 多。
机械原理课程设计说明书设计题目网球训练发球机目录1. 设计题目 (3)2. 机械系统的方案拟定 (3)2.1 工作原理确定 (3)2.2 执行构件及其运动设计 (4)2.3 原动机的选择 (4)2.4 执行构件的运动协调性设计 (4)2.5 机构选型及组合 (5)2.6 方案评价及优选 (5)3. 相关机构的尺度综合 (7)4. 机械系统的运动简图绘制及相关性能分析或说明 (10)5. 课程设计体会及建议 (11)6. 主要参考文献 (11)7. 附录1 (12)8. 附录2 (12)1.设计题目为了减轻网球教练员陪练的工作强度,需设计一台网球训练较好用的发球装置。
该装置必须能将标准的网球一个一个地从标准网球场的一边抛射过球网,使它们落在由球场白线所确定的三块场地之一内,如图所示的A、B场地,且三块球场的每一块上落球的顺序和频率必须是随机的。
该装置除装球外应无需要人照管而能自动工作,每次装球可持续抛射50个球,所发出球的速度是可变化的,并希望用一个电动机驱动自动完成。
此外,为了满足室内外训练均可使用,该装置还应方便于携带或移动和安装使用。
AB设计技术要求如下:1)标准网球的直径在65.41~ 68.58mm的范围内,其质量在0.0567~0.0585kg的范围内,网球对硬地面(如水泥地面)的反弹率在0.53~0.58之间。
2)标准网球场地形状如图所示,其尺寸: 双打为23.77m(长)×10.97m(宽),单打为22.77m(长)×8.23m(宽),而在每个端线内应留有空余地不小于6.40 m;球网的长度(即两网柱中心的距离)为12.80 m,网柱顶端距地平面为1.07 m,而球网中心上沿距地平面为0.914 m。
3)要求网球发球装置的放置高度约为1.25m,位置上下可调,且必须保持稳定,不允许发生倾翻。
4)该装置设计在实现述基本功能和技术要求的前提下,应考虑尽可能地满足好的发球要求,即发出的球具有较大的攻击力,使球在速度、力量、旋转和落点方面是可以变化的。
智能网球收球机器人系统吴伟键;曾毅杰;冯贵斌【摘要】文章介绍了一种基于机器视觉的智能捡球机器人,包含机械结构、视觉模块、无线模块、避障系统、叶轮系统等硬件设备.实现了可以完全自主收集大范围区域内的比赛型网球,且具有自动和手动两种控制模式,用户可以连接手机APP实现对车体的完全控制.具有收集速度快,成功率高,连续工作时间长,故障率低等特点.通过实物样品的性能测试表明,该捡球机器人能达到预期捡球效果,具有推广意义.【期刊名称】《科技视界》【年(卷),期】2019(000)005【总页数】2页(P90-91)【关键词】捡球机器人;颜色识别;机器视觉【作者】吴伟键;曾毅杰;冯贵斌【作者单位】华南农业大学珠江学院,广东广州510900;华南农业大学珠江学院,广东广州510900;华南农业大学珠江学院,广东广州510900【正文语种】中文【中图分类】TP391.41;G8450 引言据谷歌网站近三年来全球热搜榜的数据显示,罗杰·费德勒和拉法·纳达尔的强势回归推动了网球搜索量的增加,网球运动的重要地位已逐渐向足球和篮球的球类主导体育地位靠拢。
而且,智能车、机械臂、计算机视觉等机器人领域随着3D打印机的普及使用取得了极大的发展。
此项目的理念,正是基于这两者的共同发展而衍生出来的。
我们结合技术与设计,打造一款省时省力,智能化,效率化的场地服务型机器人,体现了新时代高效运动的创新和要求。
是一款为用户贴心打造的具有商业价值的智能产品。
1 系统硬件设计1.1 总体方案图1为本项目初始设计图。
该机器人由前后两部分组成,主体为识别系统和收球系统,后部分为集球箱,一次大约能收集50~60个网球。
最前端是扩大收球面积的仿生设计锹角挡板,顶部是图像采集部分OPENMV摄像头连接ESP32主控板传输识别到的球的圆心坐标和中心差值,单片机用PID函数定义速度与差值处理后输出两个PWM波形连接L298N驱动板的两个使能端,给左右驱动轮使能。
室内网球场设计规范随着人们运动意识的提高,越来越多的人选择打网球来保持身体健康。
而在冬季、雨天或夜晚,室内网球场成为人们打网球的不二之选。
室内网球场设计规范对于球场的建设和球员的使用都起到重要的作用。
本文将从场地规格、场地材料、照明设备、通风设备和噪音控制等几方面来探讨室内网球场的设计规范。
场地规格室内网球场的场地长度为23.77米、宽度为8.23米,按照ITF (国际网球联合会)规定,场地长度应该在23.77-23.78米之间,宽度应该在8.23-8.24米之间。
场地为矩形,但四个角必须是圆弧形。
场地材料室内网球场的场地材料应该能够提供适当的身体支持和球的弹跳度。
ITF标准推荐使用表面材料为有机玻璃酸面。
这种材料能够提供良好的抓地力和弹性,球的弹跳度也是最好的。
但是,有机玻璃酸面需要特殊的维护和保养,因此有时候也会选择使用大理石等表面材料。
照明设备室内网球场的照明设备应该能够提供足够的光线来确保球员的安全和比赛质量。
ITF规定,室内网球场的光线照度应该在300-500lx之间。
光源应该尽可能安装在地面以上,避免直射球员的眼睛。
除此之外,球场的照明设备应该能够防水和防尘,以保证运行的稳定性和寿命。
通风设备室内网球场尤其需要保证通风设备的功能。
由于场地的封闭性,场地内部很容易产生二氧化碳和湿气,使得场地变得闷热潮湿,对球员的身体健康造成威胁。
同时,好的通风设备可以保证场地内外气流良好,以达到良好的空气环境。
室内网球场的通风设备应该能够不同程度地调节室内空气流通,需要灵活、可调节、高效的功能。
噪音控制噪音控制是室内网球场设计的重要考虑因素。
球拍与球的摩擦声音、球与地面的响声、球员之间的对话声音等都会对场地内的噪声产生影响。
因此,室内网球场需要设计有效的隔音方案来保证场地外部的生活环境。
常见的隔音方案包括隔音材料的选择和覆盖,以及球场与场外环境的“空气缓冲区”等。
总结室内网球场的规范设计对于球场的建设和运营都有着重要的意义。
目录摘要 (2)Abstract (3)引言 (5)1 多功能智能捡球机概论 (6)1.1 多功能智能捡球机外形简介 (5)1.1.1 捡球机底盘 (5)1.1.3 锁存机构 (6)1.2 智能捡球机的材料简介 (6)1.2.1 底盘材料 (7)1.2.2 车轮材料 (7)1.2.3 捡球机构材料 (7)1.2.4 固定材料 (7)1.2.5 其他材料 (7)2 多功能网球捡球机工作原理 (7)2.1 多功能网球捡球机设计原理 (7)2.1.1 捡球机底盘 (7)2.1.2 捡球机构 (8)2.1.3 球桶的设计 (9)2.2 控制中心的设计 (10)2.2.1 捡球机的控制中央处理器AVR系列中ATmega16 (10)2.2.5 红外线传感器模块 (11)3 数据理论计算 (12)3.1 电机功率的计算 (12)3.1.1 驱动电动机输出功率 (12)4 实验结果 (12)参考文献 (13)附录 (12)致谢 (21)摘要目前市面上已经存在的各种网球发球机,忽视了把球捡回来的问题,很多训练网球的场所还是原始的采用人工捡球的方法,这样做不仅仅浪费了大量的时间,也消耗了人的体力。
因此研究网球捡球设备同样具有重要意义。
人们希望制造一款简单的网球捡球机,能够在网球训练时轻松捡起,有效提高网球运动乐趣。
根据目前国内外市面上主要网球捡球机的原理与特点,同时针对现有捡球机的不足之处设计了一款新型的多功能智能网球捡球机。
多功能智能网球捡球机由驱动装置、捡球装置和中央处理器组成,以蓄电池供电,并用高性能的单片机作为控制核心对遥控装置、寻球机构、捡球装置进行高效集中的控制。
多功能智能网球捡球机能够通过遥控器甚至智能手机遥控完成网球捡取、人推动捡球机运动完成网球捡取、技术成熟时可以通过无人操作智能识别全自动网球捡取,可以方便捡拾网球场上散落的网球,并可以通过遥控捡球机捡球给运动过疲劳的人们一点娱乐。
它体积小,自动化程度高,能实现人工手推、遥控和未来的智能自主捡球,节省人力资源。
关键词:网球捡球机; 控制系统; 捡球; 遥控捡球;多功能捡球机。
AbstractThere are already a variety of existing tennis ball machine , to some extent neglected to retrieve the ball and then issue a problem , a lot of tennis training places or artificial picking methods do not just spend a lot of time , also consume a person's strength. Therefore research Tennis picking device equally important . People want to manufacture a simple tennis picking machines , tennis training can be easy when it picked up , effectively improve tennis fun. According to the current domestic market principles and main characteristics of tennis picking machines , while for the deficiencies of existing picking machines designed a new type of multi-function smart tennis picking machines . Multifunctional smart tennis picking machines by the drive unit , consisting of a central processing unit and picking to battery -powered and high-performance microcontroller as the core of the remote control device , look for the ball institutions , picking device for efficient centralized control . Multifunctional smart tennis picking machines through remote control and even remote smartphones completed tennis seizure , people picking machine movement to promote the completion of tennis seizure , when the technology is mature intelligent recognition by unmanned automatic seizure of tennis , you can easily pick up scattered tennis on the tennis court , and picking through the remote machine picking people to exercise too tired little entertainment. Its small size , high degree of automation can be achieved manually push , remote and future intelligent picking , saving human resources.Keywords: Mobile ball machine; control system; ball; remote control引言就目前来说,网球运动在我国开展的还不够广泛。
网球初学者在刚学习网球时需要人来配合练习,没有合适的陪练人员使他们更加缺乏合适的练习机会。
在这种情况下,如果网球场能够配有网球发球机和捡球机,将解决初学者不能独自练习和捡球疲劳的问题。
为了方便捡球,目前市场上出现了一些一类手推式网球捡球车。
此类捡球车为纯机械式,需要有人操作。
人把捡球车推到需要捡起的球前,然后捡球车把球拨入车中。
但是,这种半自动的网球捡球工具仍有许多不足之处。
它体积大且质量重,相对于智能化捡球机比较笨拙。
既浪费了大量的空间,又影响训练人员打球,因为在它捡球的过程中运动员影响打球。
还完全需要人工操作,相对于智能化捡球机浪费了不必要的时间与体力。
而且,它只适用于地上球较多的情况,但是地上球也会影响运动员打球。
地上球少时则没有必要用上述捡球车。
因此,它的适用环境较局限,未实现捡球过程的自动化、智能化。
为了克服以上半自动网球捡球机的不足之处,作者研制了能够实现网球捡球过程的智能化、高效化的多功能智能网球捡球机。
多功能智能网球捡球机由遥控系统、运动系统,捡球系统和中央处理器组成,他能够实现遥控捡球、高效率人推动捡球机捡球、未来实现全自动无人寻球和捡球。
1 多功能智能捡球机概论1.1 多功能智能捡球机外形简介智能捡球机主体由小车底盘、控制中心、捡球机构、锁存机构等四大部分组成并相互协调工作。
从而达到快速智能捡球的目的。
1.1.1 捡球机底盘小车底盘是由直径350mm×2的圆形硬质塑料材料做成。
两块以间隔60mm的距离叠放在一起,中间通过上底盘支架和螺柱固定,在下底盘上有安装四个直流减速电机驱动轮。
在两块底盘之间有两个上底盘支架支持上底盘支架形成的V形通道的收纳口。
收纳口形成通道的底部与储球管相连,储球管是大小略大于网球直径两头90度弯曲的一个空心管,90度的弯管和直径略大于网球的作用是便于网球在进入储球管时运动不受限制。
其中一个上底盘支架的中间有一个红外检测传感器,用于检测是否有球进来。
上底盘上有储球管安装座和U型曹,用于安装储球筒和拨球杆的运动。
1.1.2 捡球机构捡球机构由马达驱动一根硬质塑料拨杆。
拨杆与电机输出主轴连接在一起,电机转动带动拨杆旋转,拨杆推动网球运动,拨杆和球在储球筒的弧形几何外形下产生竖直向上的一个分力,使网球竖直向上运动。
图1.1.2 (捡球机构图)图 1.1.2 (捡球机构实物图)1.1.3 锁存机构锁存器是由安装在直径略大于网球直径的塑料储球管左右两端上的一个只能够让球单向运动的机构。
锁存器的作用是拨球杆把球拨进储球管中让网球只能竖直向上运动而不会依靠重力竖直向下运动的一个机构,他能有效地把网球储存在进球管中而不让网球因为重力掉下去。
锁存器的原理是一个可以旋转60度的L形的机构,他可以通过L形状的L直角处的轴转动,轴的中间有扭簧用来复原旋转后L形的锁存器。
图 1.1.3 (锁存器)1.2 智能捡球机的材料简介1.2.1 底盘材料底座材料选择为硬质塑料板。
对于网球而言,其质量不大,网球质量为180-200g,直径为65mm。
并且网球场比较平坦。
捡球机在运动时的运动速度为0.5-0.7m/s。
在这种低速的运动下,捡球机运行平稳,捡球机受到的力并不大。
对材料的力学性能要求并不高。
普通的硬质塑料的许用力学参数远远超过实际使用时的力学要求。
硬质塑料的强度、硬度、塑性、韧性等力学性能都能满足使用条件。
在满足使用要求的条件下,硬质塑料具有易加工、易成型、易获取、密度小、价格便宜的众多优点。
1.2.2 车轮材料车轮是捡球机与地面接触的重要部分。
承担着所有地面与捡球机的力,材料对其影响极大。
但因为捡球本身的质量轻,运动速率小,受力小。
所以选择硬质塑料。
其直径为60mm。
外边为后约2mm的橡胶轮,选用橡胶为了增加运动时与地面的摩擦因数并且可以缓冲在地面不平时的冲击。
从而达到高效稳定的工作效率。
1.2.3 捡球机构材料捡球机构为一根直径为5mm的塑料曲杆。
曲率半径为70mm。
两端略小于中间,利用的是塑料有极好的韧性,在受力较大时不会折断。
质量较小,减小了输出力矩,节省了电能。
1.2.4 固定材料固定材料:硬质角铝、、螺钉、螺杆、螺柱等各类紧固件。
1.2.5 其他材料万用板、各类线接头、各类电子元器件(单片机、电阻、二极管、发光二极管、电动机、数码管)2 多功能网球捡球机工作原理多功能网球捡球机是将散落于球场的各个地方的网球收集捡起。
根据其工作目的,可将工作原理分为三部分:1 移动部分,2 捡球部分,3 控制部分。