雷达跟踪测角技术的研究
- 格式:doc
- 大小:222.85 KB
- 文档页数:7
雷达的目标识别技术摘要:对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明:采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。
一.引言随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。
地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。
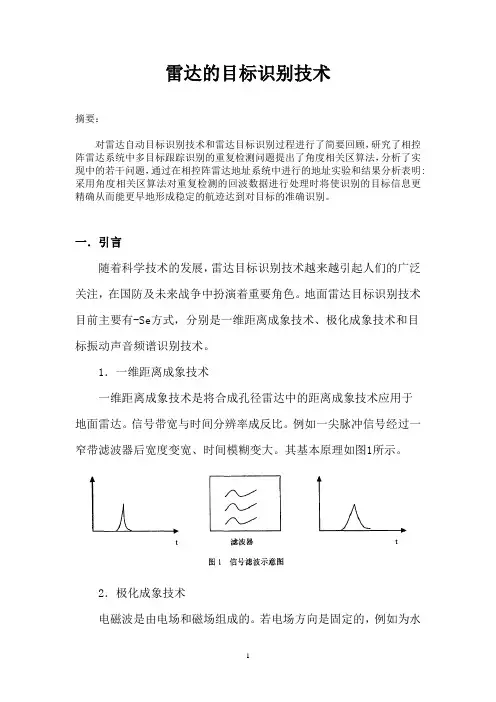
1.一维距离成象技术一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。
信号带宽与时间分辨率成反比。
例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。
其基本原理如图1所示。
2.极化成象技术电磁波是由电场和磁场组成的。
若电场方向是固定的,例如为水平方向或垂直方向,则叫做线性极化电磁波。
线性极化电磁波的反射与目标的形状密切相关。
当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。
根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。
通过计算目标散射矩阵便可以识别目标的形状。
该方法对复杂形状的目标识别很困难。
3.目标振动声音频谱识别技术根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。
通过解调反射电磁波的频率调制,复现目标振动频谱。
根据目标振动频谱进行目标识别。
传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。
点状目标的回波宽度等于入射波宽度。
一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。
通过目标回波宽度的变化可估计目标的大小。
目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。
测绘技术中常用的测角仪器介绍与操作技巧随着科技的进步和社会的发展,测绘技术在各个领域中的应用越发广泛。
而测角仪作为测绘技术中的重要工具之一,则扮演着至关重要的角色。
本文将介绍一些常用的测角仪器并分享一些操作技巧,以帮助读者更好地理解和运用测绘技术中的测角仪器。
一、光学测角仪光学测角仪是测绘工程师常用的测角仪器之一,它利用光学原理来测量物体之间的角度。
这类仪器通常具有高度精确的测量功能,并可以在各种环境下进行测量。
其操作相对简单,只需将目标对象对准测角仪的目镜,然后根据刻度线上的读数来获得所测角度。
当然,使用光学测角仪时要注意保持仪器的稳定性,以避免误差的产生。
二、全站仪全站仪是一种集光学、机械、电子技术于一体的复杂仪器,它在测量过程中能够提供更多的信息和功能。
全站仪通常可以测量角度、坐标和距离等多种参数,非常适用于大型工程的测量和控制。
操作全站仪时,需要对仪器进行一定的设置和校准,以确保测量结果的准确性。
此外,全站仪还可以通过数据传输功能将测量结果直接传输至电脑或其他设备,方便后续的数据处理和分析。
三、卫星定位系统(GPS)卫星定位系统(GPS)是现代测绘技术中的一项重大突破,它利用卫星信号来精确测量和定位物体的位置。
GPS可以提供全球范围内的高精度定位信息,并且具有自动化和高效性的特点。
在测绘工程中,GPS可以用于测量地面的三维坐标、行进路线以及相对位置等参数。
操作GPS时,需要保持接收器的稳定性,避免遮挡物对信号的影响,以确保测量结果的准确性。
四、雷达测角仪雷达测角仪是一种利用雷达波测量物体角度的仪器。
相比于其他测角仪器,雷达测角仪不受天气和环境的限制,在恶劣天气和遭遇障碍物时仍能够正常工作。
雷达测角仪通常具备自动测量和追踪功能,能够准确地检测和记录目标物体的位置和运动轨迹。
在使用雷达测角仪时,需要注意保持仪器的稳定性和正确操作,以获得可靠的测量结果。
五、红外测角仪红外测角仪是一种利用红外线技术进行测量的仪器。
单脉冲测角技术作者:轩健来源:《科技风》2018年第03期摘要:现代社会,随着导弹、卫星和宇航技术的大幅提高和进步,雷达技术逐渐应用到了越来越多的领域中。
对于目标信号,雷达不仅需要测量目标距离,还包括目标的参数测量,而在某些应用中为了快速地提供目标的精确坐标值,还需要采用自动测角的方法。
单脉冲测角技术定向精度高、实现简单、稳健性好,本文的工作就是围绕着单脉冲技术在雷达中的应用展开的。
文章首先简要阐述了研究的背景和意义,重点表明了单脉冲技术的优势,然后介绍了单脉冲技术测角的原理,最后讨论了该技术存在的缺陷。
关键词:雷达测角;单脉冲技术;同时波瓣测角一、论文研究的背景和意义这些年来,火箭、导弹、人造卫星和宇航技术的日益成熟和不断发展,随之而来的是对跟踪雷达的配套技术的迫切要求,这些方面和指标主要体现在其跟踪的速度、跟踪的精度、跟踪的距离和抵抗外界干扰的能力等方面。
在很大一部分应用情况下,跟踪和检测一个目标,雷达不仅需要估计目标的距离值和速度值,而且要额外计算目标的角坐标。
目前普遍有三种雷达测角方法:顺序波瓣法、圆锥扫描跟踪、单脉冲[1]技术。
顺序波瓣法利用两波束交替出现,或只要其中一个波束,使它绕等信号轴旋转,波束便按时间顺序在1,2位置交替出现。
单脉冲法则使用两套一样的接收系统同时工作。
它们都是属于等信号法[2]。
圆锥扫描法属于最大信号法,天线波束围绕等强线锥形旋转。
当目标偏离其等强线时,接收机收到一个调幅信号的,由此计算出目标的偏离值。
然后将接收机输出的偏离大小的误差值,送到伺服控制电路,使天线对准目标。
单脉冲雷达有很多其他雷达无法比拟和企及的优势。
首当其冲的当属其测量精度,其之所以能达到如此高的测量精度与其工作原理是分不开的。
我们知道单脉冲雷达不会随着目标回波幅度的起伏变化而变化,而其他类型的雷达比如:圆锥扫描雷达却会随着随着目标回波幅度的起伏变化而发生相应的变化,从而产生了一种附加的调制误差。
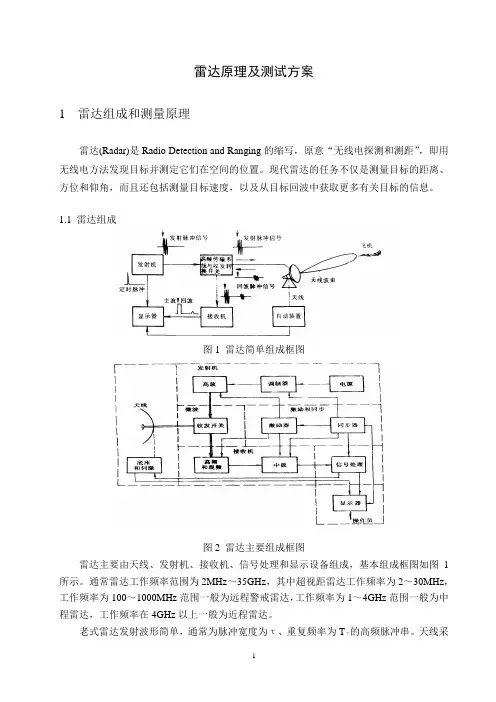
雷达原理及测试方案1 雷达组成和测量原理雷达(Radar)是Radio Detection and Ranging的缩写,原意“无线电探测和测距”,即用无线电方法发现目标并测定它们在空间的位置。
现代雷达的任务不仅是测量目标的距离、方位和仰角,而且还包括测量目标速度,以及从目标回波中获取更多有关目标的信息。
1.1 雷达组成图1 雷达简单组成框图图2 雷达主要组成框图雷达主要由天线、发射机、接收机、信号处理和显示设备组成,基本组成框图如图1所示。
通常雷达工作频率范围为2MHz~35GHz,其中超视距雷达工作频率为2~30MHz,工作频率为100~1000MHz范围一般为远程警戒雷达,工作频率为1~4GHz范围一般为中程雷达,工作频率在4GHz以上一般为近程雷达。
老式雷达发射波形简单,通常为脉冲宽度为τ、重复频率为T的高频脉冲串。
天线采τ用机械天线,接收信号处理非常简单。
这种雷达存在的问题是抗干扰能力非常差,无法在复杂环境下使用。
由于航空、航天技术的飞速发展,飞机、导弹、人造卫星及宇宙飞船等采用雷达作为探测和控制手段,对雷达提出了高精度、远距离、高分辨力及多目标测量要求,新一代雷达对雷达原有技术作了相当大的改进,其中频率捷变和线性相位信号、采用编码扩频的低截获概率雷达技术、动态目标显示和脉冲多普勒技术是非常重要的新技术。
表1 雷达频率分段波段名称频率分配雷达频段HF 2~30 超视距雷达VHF/UHF 100~1000MHz 420~450MHz 890~940MHz 远程雷达L 1~2GHz 1.215~1.4GHz 中程雷达S 2~4GHz 2.3~2.5GHz 2.7~3.7GHz 中/近程雷达C 4~8GHz 5.25~5.925GHz 近程雷达X 8~12GHz 13.4~14GHz 15.7~17.7GHz 近程雷达Ku 12~18GHz 13.4~14GHz 15.7~17.7GHzK 18~27GHz 24.05~24.25GHzKa 27~40GHz 33.4~36GHz1.2 雷达测量原理1) 目标斜距的测量图3 雷达接收时域波形在雷达系统测试中需要测试雷达到目标的距离和目标速度,雷达到目标的距离是由电磁波从发射到接收所需的时间来确定,雷达接收波形参见图3,雷达到达目标的距离R为:R=0.5×c×t r式(2)式中c=3×108m/s,t r为来回传播时间2) 目标角位置的测量目标角指方位角或仰角,这两个角位置基本上是利用天线的方向性来实现。

雷达大作业单脉冲雷达在测角方面的应用班级: 1302019姓名:指导教师:魏青一、引言1、背景对目标的定向,是雷达的主要任务之一,单脉冲定向是雷达定向的一个重要方法。
之所以叫“单脉冲”,是因为这种方法只需要一个目标回波脉冲,就可以给出目标角位置的全部信息。
单脉冲技术由于其良好的测角、角跟踪性能和抗干扰能力,因此除了在跟踪雷达中应用之外,还广泛应用到各种武器平台的控制雷达当中。
本文分析了标定方法确定天线方向图信息的理论有效性,给出利用标定结果进行宽带单脉冲测角的方法。
2、简介宽带单脉冲雷达是将传统的单脉冲雷达加载宽带信号。
在宽带信号观测下,目标可认为由一系列孤立的散射点组成。
从而宽带单脉冲雷达测角实际上是测定一系列散射点的角度。
宽带单脉冲雷达测角具有广泛的应用价值,除了标跟踪,还可以应用于三维成像。
根据对宽带单脉冲测角的基本原理分析可知,天线方向图在测角中发挥了重要的作用,目前的文献在讨论宽带单脉冲测角时,通常都是采取与文献类似的方法: 根据理论模型,设定方向图函数。
对于实际的宽带单脉冲雷达系统,方向图函数通常并不是严格的满足理论模型。
此外,精确测量实际雷达系统的方向图际雷达系统进行标定来为测角提供必要的方向图信息。
二、单脉冲雷达的自动测角系统中的优势1、角度跟踪精度与圆锥扫描雷达相比,单脉冲雷达的角度跟踪精度要高得多。
其主要原因有以下两点:第一,圆锥扫描雷达至少要经过一个圆锥扫描周期后才能获得角误差信息,在此期间,目标振幅起伏噪声也叠加在圆锥扫描调制信号(角误差信号)上形成干扰,而自动增益控制电路的带宽又不能太宽,以免将频率为圆锥扫描频率的角误差信号也平滑掉,因而不能消除目标振幅起伏噪声的影响,在锥扫频率附近一定带宽内的振幅起伏噪声可以进入角跟踪系统,引起测角误差。
而单脉冲雷达是在同一个脉冲内获得角误差信息,且自动增益控制电路的带宽可以较宽,故目标振幅起伏噪声的影响基本可以消除。
第二、圆锥扫描雷达的角误差信号以调制包络的形式出现,它的能量存在于上、下边频的两个频带内,而单脉冲雷达的角误差信息只存在于一个频带内。

天线差斜率对测量雷达测角精度的影响
张润杰;李伟宗
【期刊名称】《现代雷达》
【年(卷),期】2012(34)9
【摘要】对于精密跟踪测量雷达,系统的威力和跟踪精度是天线设计时考虑的两个重点。
在天线设计中,威力主要由天线的和增益保证,而精度主要是由雷达天线的归一化差斜率保证,即天线归一化差斜率是影响精密跟踪测量雷达测角精度的重要因素。
文中着重阐述了差斜率的定义以及差斜率对系统精度的影响进行了分析;然后结合实际情况,分析了五喇叭馈源差斜率对系统精度的影响情况,最后提出了馈源优化的措施,并且检验了馈源优化后的系统角度随机误差,满足雷达设计要求。
【总页数】3页(P16-17)
【关键词】脉冲雷达;差斜率;测角精度
【作者】张润杰;李伟宗
【作者单位】太原卫星发射中心
【正文语种】中文
【中图分类】TN83
【相关文献】
1.单脉冲雷达天线差斜率测试技术的改进 [J], 张娅岚
2.TWS雷达无源工作测角精度与有源工作测角精度的比较 [J], 李晓毅;康锡章
3.基于相控阵天线单脉冲测角算法的测角精度研究 [J], 甘明
4.试验平台对高精度测量雷达测角误差的影响及补偿 [J], 杨明远;邹波;江利中;顾泽凌;李雁斌
5.接收光路光束发散角对多普勒测风激光雷达测量精度的影响 [J], 迟如利;胡明勇;钟志庆;孙东松;周军
因版权原因,仅展示原文概要,查看原文内容请购买。
第28卷第12期 兵工自动化 Vol. 28, No. 12 2009年12月 Ordnance Industry Automation Dec. 2009·82· doi: 10.3969/j.issn.1006-1576.2009.12.028一种雷达方位角检测方法胡定军,王玮,冯玉龙(镇江船艇学院 指挥系,江苏 镇江 212003)摘要:介绍了一种雷达方位角测量的方法,该方法采用旋转变压器/轴角转换器AD2S80BD ,将旋转变压器输出的模拟信号通过AD2S80BD 轴角转换电路转换成数字量信号,再利用单片机MSP430F123进行解算,得出雷达角位置信号,实时供雷达终端显示或转发。
该系统接口电路简单可靠,工作稳定,在雷达测量系统中有较高的应用价值。
关键词:旋转变压器;雷达;方位角;AD2S80BD 中图分类号:TP206+.1; TN956 文献标识码:AStudy on Measuring Radar AzimuthHU Ding-jun, WANG Wei, FENG Yu-long(Dept. of Watercraft Commanding, Zhenjiang Watercraft College, Zhenjiang 212003, China)Abstract: Introduce the method of radar azimuth detection. The method adopts resolver and angle converter AD2S80BD, The analog signals of resolver were transformed into the digital signal by AD2S80BD axis angle circuit. Then the radar angle position can be disposed by simple chip MSP430F123, and it can be shown and transmitted on the radar terminator. The system interface circuit is simple, reliable and stable, with high application value in radar measurement system.Keywords: Resolver; Radar; Azimuth; AD2S80BD0 引言角位置测量装置是工业控制设备的重要组成部分,在飞行器姿态控制和检测、导弹控制、雷达天线跟踪等角位置测量控制系统中有着广泛应用。
现代先进的雷达技术原理
现代先进的雷达技术原理主要包括以下几个方面:
1. 雷达波束形成:利用天线阵列(如相控阵)或天线微电机系统,通过控制单个天线元件的相位和幅度,形成一个聚焦的波束,以实现精确瞄准和定位。
这可以提高雷达的目标检测性能,减少对干扰源的敏感性。
2. 多普勒频移处理:利用多普勒效应,通过测量目标反射回来的雷达波的频率变化,可以获取目标的速度信息。
这样的处理可以区分静止目标和运动目标,并进一步提高雷达的目标检测和跟踪能力。
3. 雷达信号处理:利用数字信号处理技术,对雷达返回的信号进行处理和分析。
这可以提取目标的特征信息,如目标的速度、距离、方位角和俯仰角等,以用于目标识别和跟踪。
4. 雷达脉冲压缩:通过发射短脉冲,并使用压缩滤波器对反射回来的信号进行处理,可以提高雷达的距离分辨率。
这意味着雷达可以在非常短的时间内区分非常接近的目标。
5. 基于目标特性的信号处理:利用现代信号处理技术,如极化处理和频谱分析,可以提取目标的形状、材料特性和运动模式等信息。
这有助于进一步识别目标并提高目标检测和跟踪能力。
6. 雷达网络和数据融合:现代雷达系统通常具有网络化和多源数据融合的能力,可以与其他雷达系统和传感器进行通信和数据交换。
这可以提高雷达探测和跟踪的准确性和鲁棒性,以适应更复杂的作战环境。
总体而言,现代先进的雷达技术依靠先进的信号处理、天线技术和网络化能力,实现了更高的目标检测和跟踪性能,提高了作战能力和对威胁的感知能力。
雷达跟踪测角技术的研究
——单脉冲跟踪测角的原理及仿真
1.引言
雷达测角的物理基础是电波在均匀介质中传播的直线性和雷达天线的方向
性。为了快速地提供目标的精确值,要采用自动测角的方法。当目标方向偏离天
线轴线(即出现了误差角{ EMBED Equation.KSEE3 \* MERGEFORMAT |)时,就
能产生一误差电压,误差电压的大小正比于误差角,其极性随偏离方向不同而改
变。此误差电压经跟踪系统变换、放大、处理后,控制天线向减小误差角的方向
运动,使天线轴线对准目标。本文主要研究单脉冲雷达角度跟踪的原理及仿真,
单脉冲测角获得目标信息的时间可以很短,理论上只需要分析一个回波脉冲就可
以确定角误差,可以获得比圆锥扫描高很多的精度。
2.单脉冲雷达角跟踪系统的组成及基本工作原理
2.1单脉冲雷达角跟踪系统的基本组成
单脉冲雷达角跟踪系统一般由扫描天线以及信号变换(混频、中放等)、相位
检波和伺服系统组成,其系统的组成如图l所示。其中和差网络完成和、差处理,
形成和差波束。信号变换用以变换信号参数之间的相位关系。相位检波形成角跟
踪误差信号。伺服系统根据角跟踪误差信号控制天线的转动。
基本工作原理为:天线接收到的回波信号经“和差网络”后形成包含目标角
误差信号的高频信号,经“信号变换”(包括混频、中放等)后送至“相位检波”
电路,检出角误差信号。最后,伺服系统控制天线转动,直到角误差为0(天线电
轴对准目标)。
1
图1 角度跟踪系统组成框图
2.2和差网络
2.2.1和差比较器
和差比较器是单脉冲雷达的重要关键部件,它完成和、差处理,形成和、差
波束。和差比较器用得较多的是双T接头,如图2(a)所示。它有4个端口Σ(和)
端、Δ(差)端、1端和2端。假定4个端都是匹配的,则从Σ端输人信号时,1、2
端使输出等幅同相信号,Δ(差)无输出:若从1、2端输人同相信号时,则Δ(差)
端输出两者的差信号,Σ端输出和信号。
图2 双T接头及和差比较器示意图
和差比较器的示意图如图2(b)所示,1到Σ与2到Σ均要经过/4,因此在Σ
端同相相加:而l端到△端经过/4,2端到凸端经过3/4,两者相差/2,因此在△
端反相相加。和差比较器的1、2端与形成两个波束的两相邻馈源1、2相连。发射
时,从发射机来的信号加到和差比较器的Σ端,故1、2端输出等幅同相信号,两
个馈源被同相激励,并辐射出相同的功率,结果两波束在空间各点产生的场强同
2
相相加,形成发射和波束。
2.2.2和、差波束
雷达天线在一个角平面内有两个部分重叠的波束。振幅和差单脉冲雷达取得角误
差信号的基本方法是将这两个波束同时收到的信号进行和、差处理,分别得到和
信、差信号。图3(b)和(c)所示为与和、差信号相对应的和、差波束。
差波束用于测角,和波束用于发射、观察和测距,和波束信号还用作相位比较的
基准。
图3 和、差波束
2.3相位检波器和角误差信号的变换
3
和差比较器△端输出的高频角误差信号还不能直接来控制天线跟踪目标,必
须把它转换成直流误差电压,其大小应与高频角误差信号的振幅成比例,极性由
高频角误差信号的相位来决定。这一变换由相位检波器来完成,将和、差信号通
过各自的接收通道,经变频、中放后一起加到相位检波器上进行相位检波。差波
束用于测角,和波束用于发射、观察和测距,和信号作为相位检波器的基准信号。
在和差比较器的和端,完成两信号的同相相加,输出和信号。设和信号为,
其振幅为两信号振幅之和。假定两个波束的方向性函数完全相同,设为,两波束
接收到的信号电压振幅为,且到达和差比较器端时保持不变,两波束相对天线轴
线的偏角为,则对于方向的目标,和信号的振幅表达式如下:
式中,=为接收和束方向性函数,与发射和波束的方向性函数完全相同。
在和差比较器的差端,两信号反相相加, 输出差信号,设为。若到达端的两
信号用表示,它们的振幅仍为,相位相反, 则差信号的振幅为:
式中=。
现假定目标的误差角为,则差信号振幅为,在跟踪状态,很小,将展开成泰
勒级数并忽略高次项, 则:
因很小,上式中。
由上式可知,在一定的误差范围内,差信号的振幅与误差角成正比,相位与 中的
强者相同。由于在端 相位相反,故目标偏向不同,的相位差180°。因此,端输
出差信号的振幅大小表明目标误差角的大小,其相位则表示目标偏离天轴线的方
向。
4
图4 角鉴别特性曲线
3.实验仿真
和差器前面两个输入信号的高频相移和幅度不平衡,和差器后面和差通道引
入的中频相移和中频幅度不平衡,导致和、差双通道幅相特性不一致,从而造成
测角误差。在下面的仿真中,不考虑和差通道幅度相位完全相同,利用matlab
编写程序仿真得到角鉴频特性曲线,u为定向斜率:
%matlab程序
k=0.730;
d=0.160;
k_pd=1;
A=1;
labda=2*pi/k;
theta_3db=1.2*labda/d;%天线波束宽度
theta_s=theta_3db/3;%相对等场强方向的波束倾斜角
theta_t=-2*theta_3db:0.2:2*theta_3db;
fi=k*d*sin(theta_t);
%g=0.5*sin(k*0.5*d.*theta)/(k*0.5*d.*theta);%天线方向图
g1=0.5*sin(k*0.5*d*(theta_s-theta_t))./(k*0.5*d*(theta_s-
theta_t));
g2=0.5*sin(k*0.5*d*(theta_s+theta_t))./(k*0.5*d*(theta_s+
theta_t));
u=3;
ess=u^2*k_pd*(g1.^2-g2.^2)./((1+u*(g1+g2)).^2);%差信号
plot(theta_t/theta_3db,ess,'r-')
grid on
5
hold on
u=8;
ess=u^2*k_pd*(g1.^2-g2.^2)./((1+u*(g1+g2)).^2);
plot(theta_t/theta_3db,ess)
axis([-1.1 1.1 -1 1]);
局部放大图
6