第2章滑模变结构控制基础
- 格式:pptx
- 大小:690.00 KB
- 文档页数:26

滑模变结构控制理论及其在机器人中的应用研究共3篇滑模变结构控制理论及其在机器人中的应用研究1滑模变结构控制(Sliding Mode Control,SMC)是一种非线性控制方法,具有高精度、强适应性、鲁棒性好等优点,因此被广泛应用于机器人控制领域。
其基本思想是构造一个滑模面,使系统状态到达该面后就会保持在该面上运动,在保证系统稳定性的同时达到控制目的。
本文将阐述滑模变结构控制的理论基础以及在机器人控制中的应用研究。
一、滑模变结构控制的理论基础1. 滑模面滑模面是滑模控制的核心概念,它是一个虚拟平面,将控制系统的状态分为两个区域:滑模面上和滑模面下。
在滑模面上,系统状态变化很小,具有惯性;而在滑模面下,系统状态变化很大,具有灵敏性。
在滑模控制中,系统状态必须追踪滑模面运动,并保持在滑模面上,进而实现控制目的。
2. 滑模控制定律滑模控制定律是滑模变结构控制的核心之一,主要由滑模控制器和滑模面组成。
滑模控制器将系统状态误差与滑模面上的虚拟控制输入之间做差,生成实际控制输入。
而滑模面则是根据控制目的和系统性质,通过手动选择滑模面的形状和大小来合理地设计。
例如,对于已知模型的系统,可使用小扰动理论来设计滑模面;而对于未知模型的系统,可使用自适应滑模控制来自动调节滑模面。
总体来说,滑模控制定律是一种强鲁棒控制方法,在快速响应、鲁棒性和适应性等方面都表现出色。
3. 滑模变结构控制滑模变结构控制是将滑模控制定律与变结构控制相结合形成的一种新型控制方法。
在滑模变结构控制中,滑模面被用来描述整个系统状态,而滑模控制定律则用来保证系统状态追踪滑模面的过程中,系统特征不会发生大的变化。
换句话说,滑模控制定律的目的是在系统状态到达滑模面后,控制系统能够迅速且平稳地滑过该面,进而保持在滑模面上稳定运动。
二、滑模变结构控制在机器人中的应用研究滑模变结构控制广泛应用于机器人控制领域,例如:机器臂控制、移动机器人控制、人形机器人控制等。

非线性控制系统中的滑模变结构控制技术在实际生产和工程控制中,很多系统存在非线性、时变性、多变量等复杂特性,这些使得传统的控制方法难以达到精准的控制目标,严重影响了系统的可靠性和效率。
为了解决这一问题,人们引入了滑模变结构控制技术,该技术基于滑模控制和变结构控制相结合,保证了系统的鲁棒性和稳定性。
本文将对滑模变结构控制技术进行详细介绍。
一、滑模控制滑模控制是一种能够抵抗外部干扰的控制方法,它通过将系统状态带入一个具有滑动模态的平面内,从而实现对系统的控制。
具体来说,滑模控制的核心思想是建立一个滑模面,当系统状态进入该面时,系统会发生快速运动,从而将状态带入该面内。
由于滑模面以及系统状态在该面内的运动是非常快速、迅速且可控的,因此,外来扰动对系统的影响可以得到有效的抑制。
二、变结构控制变结构控制是一种在控制系统中引入结构变化的控制方法,它可以对系统进行实时调整和适应,提高系统的性能和鲁棒性。
变结构控制的核心思想是为控制系统建立多个不同的控制结构,当系统状态进入某一结构时,控制系统会自动切换到该结构,从而实现对系统的控制。
三、滑模变结构控制滑模变结构控制是一种将滑模控制与变结构控制相结合的控制方法,它既能够抵抗外部干扰,又能够实现实时调整和适应。
具体来说,滑模变结构控制方法利用滑模控制的滑动模态和变结构控制的结构变化,为系统建立多个滑模面,并且在不同的面上对系统进行不同的控制调节。
当系统进入某一滑模面时,控制系统会自动切换到该面,并进行相应的控制。
这种控制方式能够在维持系统的稳定性的同时,提高系统的跟踪性和鲁棒性,适用于各种非线性控制系统。
四、应用滑模变结构控制在许多领域上都有着广泛的应用。
例如,机械控制、飞行器控制、船舶控制、发电机控制、电力网络控制等。
其中,机械控制方面的应用较多,例如,滑模变结构控制在工业机器人中的应用,可以实现机械臂的准确抓取和定位,提高生产效率;在飞行器控制方面,滑模变结构控制可以通过在不同的飞行阶段调整系统的控制结构,从而提高飞行器的飞行性能,实现复杂的飞行任务。
永磁同步电机的滑模变结构控制永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)是一种高性能的电动机,具有高效率、高功率密度、高转矩密度和无需串激磁场等优点,广泛应用于工业、交通和家电等领域。
滑模变结构控制(Sliding Mode Variable Structure Control,简称VSC)是一种基于滑模面的非线性控制方法,具有系统稳定性好、对参数扰动和外部干扰具有强鲁棒性等优点。
因此,将滑模变结构控制应用于永磁同步电机的控制中,可以提高系统的性能和鲁棒性。
永磁同步电机的滑模变结构控制通过设计合适的滑模面来实现对系统的控制。
滑模面是一个动态面,当系统的状态在该面上滑动时,系统的状态就会被稳定控制在滑模面上。
滑模面的选择对控制系统的性能和鲁棒性影响很大。
传统的滑模变结构控制方法是通过设计一个线性滑模面来实现对系统的控制,但是由于永磁同步电机具有非线性特性,传统的线性滑模面设计方法不能满足对系统的控制要求。
为了解决上述问题,研究人员提出了非线性滑模面设计方法。
非线性滑模面可以通过使用非线性函数对其进行设计,以更好地适应永磁同步电机的非线性特性。
常见的非线性滑模面设计方法包括采用鲁棒控制理论中的鲁棒滑模面设计方法和使用神经网络等非线性函数逼近滑模面。
在永磁同步电机的滑模变结构控制中,还需要考虑到系统的不确定性和外部扰动。
为了增强系统的鲁棒性,可以在滑模变结构控制中引入自适应控制策略。
自适应控制策略可以根据系统的状态和扰动的大小及方向来调整滑模面的形状和参数,从而提高系统的鲁棒性和适应性。
除了滑模变结构控制,还可以结合其他控制方法来进一步提高永磁同步电机的控制性能。
例如,模糊控制、PID控制和最优控制等方法可以与滑模变结构控制相结合,形成混合控制策略。
混合控制策略可以综合利用各种控制方法的优点,同时克服各种方法的局限性,提高系统的性能和鲁棒性。
总结来说,永磁同步电机的滑模变结构控制是一种高效稳定的控制方法,可以克服永磁同步电机的非线性特性和扰动的影响,提高系统的性能和鲁棒性。
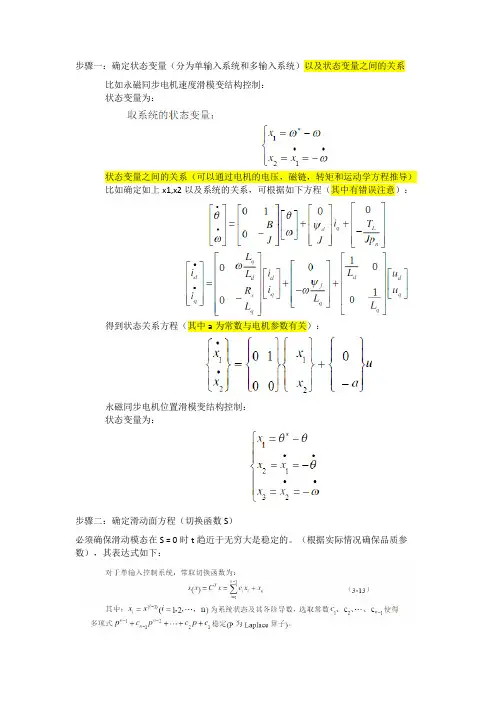
步骤一:确定状态变量(分为单输入系统和多输入系统)以及状态变量之间的关系比如永磁同步电机速度滑模变结构控制:状态变量为:状态变量之间的关系(可以通过电机的电压,磁链,转矩和运动学方程推导)比如确定如上x1,x2以及系统的关系,可根据如下方程(其中有错误注意):得到状态关系方程(其中a为常数与电机参数有关):永磁同步电机位置滑模变结构控制:状态变量为:步骤二:确定滑动面方程(切换函数S)必须确保滑动模态在S = 0时t趋近于无穷大是稳定的。
(根据实际情况确保品质参数),其表达式如下:这种切换函数下得到的响应是过阻尼响应,理论上是不存在超调量的。
对于多输入系统,其切换函数为:步骤三:方法一:确定趋近率函数(切换函数的微分S’),并确定滑模变结构控制的输出量即控制率函数Ux(Ux)。
另外,需要由电机方程指定该控制率函数和电机系统变量的关系(实际需要决定)(比如:速度滑模变结构的输出肯定是与电机电流iq是有关系的,从而便于下一步的电流逆变器的控制)。
常见的趋近率函数为:其他特殊的更常用的趋近律如下:如此可确定控制率函数的表达式。
(本质上控制率函数是用来去除系统参数变化和外部扰动对系统的影响。
)该方法的缺点是:由于系统在滑动面上对参数及系统外部扰动的抗干扰性很强。
而在滑动面外(趋近运动),控制率函数在起作用,而控制率函数是与系统参数有关的。
所以收到系统参数的影响。
为了能够实现系统一直具有很高的鲁棒性,可以使系统设置从初始时刻就处于滑动面上,见方法二(全局滑模变结构控制)。
方法二:合适选择切换函数并先确定控制率函数Ux。
(由于系统一直处于滑动面上,所以无需选择趋近率函数)比如PMSM的速度滑模变结构控制:上述条件一满足了在初始时刻系统就处于滑动面上。
常见的控制率函数选择(提高抗扰性的):在本例中为了保证系统一直处于滑动面上,需选择如下函数:其中Ueq是用来使在任何时间t,系统均处于滑动面上的,计算方法如上。