光学设计-第18章--摄影和投影物镜设计
- 格式:doc
- 大小:438.42 KB
- 文档页数:17
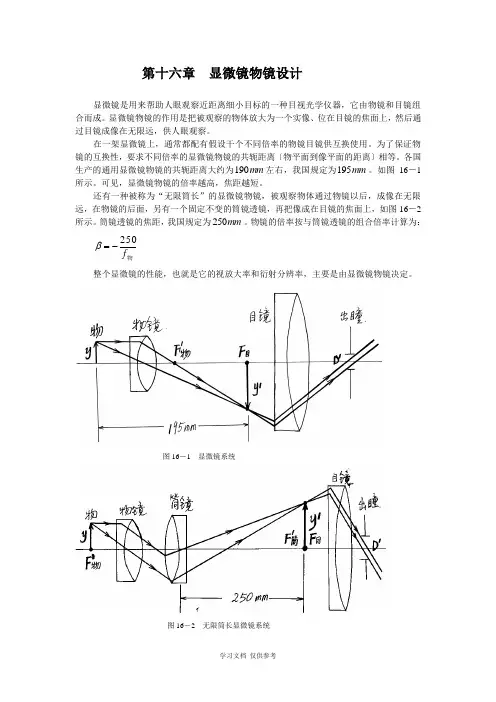
第十六章 显微镜物镜设计显微镜是用来帮助人眼观察近距离细小目标的一种目视光学仪器,它由物镜和目镜组合而成。
显微镜物镜的作用是把被观察的物体放大为一个实像、位在目镜的焦面上,然后通过目镜成像在无限远,供人眼观察。
在一架显微镜上,通常都配有假设干个不同倍率的物镜目镜供互换使用。
为了保证物镜的互换性,要求不同倍率的显微镜物镜的共轭距离〔物平面到像平面的距离〕相等。
各国生产的通用显微镜物镜的共轭距离大约为mm 190左右,我国规定为mm 195。
如图16-1所示。
可见,显微镜物镜的倍率越高,焦距越短。
还有一种被称为“无限筒长”的显微镜物镜,被观察物体通过物镜以后,成像在无限远,在物镜的后面,另有一个固定不变的筒镜透镜,再把像成在目镜的焦面上,如图16-2所示。
筒镜透镜的焦距,我国规定为mm 250。
物镜的倍率按与筒镜透镜的组合倍率计算为: 物f 250-=β 整个显微镜的性能,也就是它的视放大率和衍射分辨率,主要是由显微镜物镜决定。
图16-1 显微镜系统图16-2 无限筒长显微镜系统§1 显微镜物镜的光学特性一 显微镜物镜的倍率显微镜物镜的倍率是指物镜的垂轴放大率β。
由于显微镜是实物成实像,因此β为负值,但一般用β的绝对值代表物镜的倍率。
在共轭距L 一定的条件下,β与物镜的焦距存在以下关系:L f ⋅--=2)1(ββ物 对于无限筒长的显微镜的物镜,其焦距与倍率之间的关系为:β250-=物f式中,β为负值。
无论是有限筒长,还是无限筒长的显微镜的物镜,倍率β的绝对值越大,焦距物f 越短。
所以,实际上,物镜的倍率决定了物镜的焦距。
因此,显微镜物镜的焦距一般比望远镜物镜的焦距短得多。
焦距短是显微镜物镜光学特性的一个特点。
二 显微镜物镜的数值孔径数值孔径U n NA sin ⋅=,是显微镜物镜最主要的光学特性,它决定了物镜的衍射分辨率δ,根据显微镜物镜衍射分辨率的计算公式:NAλδ61.0= 公式中,δ代表显微镜物镜能分辨的最小物点间隔;λ为光的波长,对目视光学仪器来说,取平均波长nm mm 5000005.0==λ;NA 为物镜的数值孔径。
球幕投影数字鱼眼镜头的光学设计李维善;陈琛;刘宵婵;张禹【摘要】采用“非相似”成像原理,利用Zemax光学软件设计了一款适用于1.60 cm(0.63英寸)3LCD数字投影机的球幕投影数字鱼眼镜头.镜头结构是一种反远距型光学结构,由5组6片球面透镜组成,具有结构简单、易加工等特点.镜头全视场角为180°,焦距为3.28 mm,相对孔径为1/1.9,后工作距离为35.8mm,光学总长为196mm.镜头具有较高的成像质量,在50 lp/mm处,各个视场的MTF值均大于0.4,最大垂轴色差为4.5 μm,全视场的F-theta畸变绝对值小于3%,最大视场的像面相对照度达到96.27%.【期刊名称】《应用光学》【年(卷),期】2016(037)001【总页数】6页(P39-44)【关键词】光学设计;球幕投影;数字鱼眼镜头;相对照度【作者】李维善;陈琛;刘宵婵;张禹【作者单位】秦皇岛视听机械研究所,河北秦皇岛066000;秦皇岛视听机械研究所,河北秦皇岛066000;秦皇岛视听机械研究所,河北秦皇岛066000;秦皇岛视听机械研究所,河北秦皇岛066000【正文语种】中文【中图分类】TN946.1;TH703鱼眼镜头,也叫全景镜头,属于超广角镜头中的一种特殊镜头,镜头的前镜片呈抛物状向镜头前部凸出,与鱼的眼睛颇为相似,“鱼眼镜头”因此得名。
鱼眼镜头被广泛地应用在摄影、电影、投影、监控以及医疗等领域。
鱼眼放映或投影镜头最早出现在20世纪70年代的胶片球幕电影系统中,其投射出的影像大而清晰,自观众面前延至身后,且伴有立体声环音,使观众具有强烈的临场感和空间感[1],因此,在电影领域受到极大的欢迎。
现在随着数字视频制作技术和数字投影机技术的快速发展,由单台数字投影机和单只数字鱼眼投影镜头结合的单机位球幕投影,因系统稳定性高、成本低、易维护等优点已成为球幕投影的主流技术,在球幕投影应用中越来越受到青睐,已经广泛应用于天文、地理教学、科普宣传、展览展示、娱乐业等领域[2]。
应用光学各章知识点归纳第一章几何光学基本定律与成像概念波面:某一时刻其振动位相相同的点所构成的等相位面称为波阵面,简称波面。
光的传播即为光波波阵面的传播,与波面对应的法线束就是光束。
波前:某一瞬间波动所到达的位置。
光线的四个传播定律:1)直线传播定律:在各向同性的均匀透明介质中,光沿直线传播,相关自然现象有:日月食,小孔成像等。
2)独立传播定律:从不同的光源发出的互相独立的光线以不同方向相交于空间介质中的某点时彼此不影响,各光线独立传播。
3)反射定律:入射光线、法线和反射光线在同一平面内,入射光线和反射光线在法线的两侧,反射角等于入射角。
4)折射定律:入射光线、法线和折射光线在同一平面内;入射光线和折射光线在法线的两侧,入射角和折射角正弦之比等于折射光线所在的介质与入射光线所在的介质的折射率之比,即nn I I ''sin sin = 光路可逆:光沿着原来的反射(折射)光线的方向射到媒质表面,必定会逆着原来的入射方向反射(折射)出媒质的性质。
光程:光在介质中传播的几何路程S 和介质折射率n 的乘积。
各向同性介质:光学介质的光学性质不随方向而改变。
各向异性介质:单晶体(双折射现象)马吕斯定律:光束在各向同性的均匀介质中传播时,始终保持着与波面的正交性,并且入射波面与出射波面对应点之间的光程均为定值。
费马原理:光总是沿光程为极小,极大,或常量的路径传播。
全反射临界角:12arcsinn n C = 全反射条件:1)光线从光密介质向光疏介质入射。
2)入射角大于临界角。
共轴光学系统:光学系统中各个光学元件表面曲率中心在一条直线上。
物点/像点:物/像光束的交点。
实物/实像点:实际光线的汇聚点。
虚物/虚像点:由光线延长线构成的成像点。
共轭:物经过光学系统后与像的对应关系。
(A ,A ’的对称性)完善成像:任何一个物点发出的全部光线,通过光学系统后,仍然聚交于同一点。
每一个物点都对应唯一的像点。

<<光学工程基础>>参考文献和习题1 光波、光线和成像参考文献:1. Walker Bruce H. Optical Engineering Fundamentals. Bellingham, Washington: SPIE,19982. 袁旭滄. 应用光学. 北京:国防工业出版社,19883. Ditteon Richard 著,詹涵菁译. 现代几何光学. 长沙:湖南大学出版社,20044. Smith W J. Modern Optical Engineering. Boston: The McGreaw-Hill Companies, Inc, 20015. 陈熙谋. 光学•近代物理. 北京:北京大学出版社,20026. 钟钖华. 现代光学基础. 北京:北京大学出版社,20037. Ghatak A K, Thyagarajan K. Contemporary Optics. New Y ork: Plenum Publishing Corporation, 19788. 彭旭麟,罗汝梅. 变分法及其应用. 武汉:华中工学院出版社,19839. Kidger Michael J. Fundamental Optical Design. Bellingham, Washington: SPIE,200210. Jenkins F , White H. Fundamentals of Optics. New Y ork: The McGreaw -Hill Companies, Inc, 197611. Hecht E. Optics. Reading, Massachusetts: Addison-Wesley, 1987习题:1. 简述几何光学的几个基本定律。
2. 简述成像的基本概念。
3. 光在真空中的速度是多少?在水中呢?在钻石中呢?4. 画出折射角i '随入射角i 变化的函数曲线,条件是1=n ,n '是下列值:(a) 1.333;(b)1.5163;(c) 1.78831。
变焦投影物镜光学系统设计罗春华;岳品良;张东虎;梁久伟【摘要】设计了在相同光学引擎、相同屏幕位置下,能满足不同屏幕尺寸需要的变焦投影物镜.该变焦投影物镜的焦距变化范围为22 mm~37 mm,视场角为46°~75°,F数为2.8.考虑设计的光学系统要求相对孔径较大,具有大视场角和小变焦倍比,根据变焦理论,采用正组补偿的机械补偿法,并对变倍组、补偿组进行合理的倍率选段,求出高斯解;然后对各组元分别选用合理的初始结构,利用Zemax光学设计软件进行优化设计,适当添加非球面.采用二、四组元运动的机械补偿法解决了大视场变焦系统畸变难以控制的问题,并利用调制传递函数综合评价了整个光学系统.设计结果表明:该变焦投影物镜系统的光学结构和成像质量均符合设计指标要求,在空间频率64 Lp·mm-1处调制传递函数(MTF)值均大于0.3,畸变小于1%.%Zoom projection lens are designed to meet requirements of different screen size with same optical engine and screen position.Focal length of zoom projection lens ranges from 22 mm to 37 mm,viewing angle is 46° to 75°,and F number is 2.8.Considering design of optical system requiring a relatively large aperture,with large field of view and small zoomratio,according to zoom theory,positive mechanical compensation configuration is adopted,reasonable magnifications of zoom configuration are chosen and Gauss roots are derived.Appropriate primal configurations based on each subassembly are chosen.Optimization design is carried out with Zemax optical design software,and added proper aspheric surface.Mechanical compensation method of two and four component motion is used to solve problem that distortion of large field of view isdifficult to control,and whole optical system is evaluated synthetically by using modulation transfer function (MTF).Design results show that optical structure and image quality of zoom projection objective system meet design requirements.Spatial modulation transfer function (MTF) value is more than 0.3 at spatial frequency of 64 lp · mm-1,and distortion is less than 1%.【期刊名称】《应用光学》【年(卷),期】2017(038)002【总页数】7页(P180-186)【关键词】变焦投影物镜;机械补偿法;调制传递函数【作者】罗春华;岳品良;张东虎;梁久伟【作者单位】长春理工大学光电信息学院,吉林长春 130012;长春理工大学光电信息学院,吉林长春 130012;长春理工大学光电信息学院,吉林长春 130012;长春理工大学光电信息学院,吉林长春 130012【正文语种】中文【中图分类】TN202从1839年由奥古斯特发明的历史上第一台投影仪——幻灯机,到后来的光学投影仪,再到现在的数字投影仪以及液晶投影仪,投影技术已经不单单是满足放映清晰高效的影像效果的简单要求了。
光学设计教程课后答案1.2光学系统有哪些特性参数和结构参数?特性参数:(1)物距L(2)物高y或视场角ω(3)物方孔径角正弦sinU或光速孔径角h(4)孔径光阑或入瞳位置(5)渐晕系数或系统中每一个的通光半径结构参数:每个曲面的面行参数(r,K,a4,a6,a8,a10)、各面顶点间距(d)、每种介质对指定波长的折射率(n)、入射光线的位置和方向1.3轴上像点有哪几种几何像差?轴向色差和球差1.4列举几种主要的轴外子午单色像差。
子午场曲、子午慧差、轴外子午球差1.5什么是波像差?什么是点列图?它们分别适用于评价何种光学系统的成像质量?波像差:实际波面和理想波面之间的光程差作为衡量该像点质量的指标。
适用单色像点的成像。
点列图:对于实际的光学系统,由于存在像差,一个物点发出的所有光线通过这个光学系统以后,其像面交点是一弥散的散斑。
适用大像差系统2.1叙述光学自动设计的数学模型。
把函数表示成自变量的幂级数,根据需要和可能,选到一定的幂次,然后通过实验或数值计算的方法,求出若干抽样点的函数值,列出足够数量的方程式,求解出幂级数的系数,这样,函数的幂级数形式即可确定。
像差自动校正过程,给出一个原始系统,线性近似,逐次渐进。
2.2适应法和阻尼最小二乘法光学自动设计方法各有什么特点,它们之间有什么区别?适应法:参加校正的像差个数m必须小于或等于自变量个数n,参加校正的像差不能相关,可以控制单个独立的几何像差,对设计者要求较高,需要掌握像差理论阻尼最小二乘法:不直接求解像差线性方程组,把各种像差残量的平方和构成一个评价函数Φ。
通过求评价函数的极小值解,使像差残量逐步减小,达到校正像差的目的。
它对参加校正的像差数m没有限制。
区别:适应法求出的解严格满足像差线性方程组的每个方程式;如果m>n或者两者像差相关,像差线性方程组就无法求解,校正就要中断。
3.1序列和非序列光线追迹各有什么特点?序列光线追迹主要用于传统的成像系统设计。
现代光学设计课程代号 D—44进修考核大纲李林编兵器工程师进修大学20XX年8月进修考核大纲一、课程的性质与基本要求本课程是从事光电技术与仪器、光学系统设计、光学检测等相关学科的专业学生和技术人员快速全面了解典型光学系统设计的专业课程。
该课程可以培养学生在认识和理解各种光学系统工作原理的基础上,建立对系统像差及光学系统设计的认识,了解在相关领域中的发展趋势。
本课程首先介绍光学设计的基础知识和像差理论,然后以国外先进的光学设计软件ZEMAX作为基础,详细介绍采用ZEMAX设计新型光学系统的方法。
本课程的特点是紧密结合当前各应用领域的最新的一些光学系统,内容基本上可以分为7个部分。
第1部分是光学系统的像质评价,这是设计一个光学系统所必备的基础知识。
在这部分里,首先详细地介绍了最常用的几何像差及相应的计算程序;然后,介绍了另一个重要的像质评价指标──光学传递函数,讨论了两种光学传递函数程序的特点与使用方法。
第2部分是光学自动设计的原理与程序,介绍了适应法和阻尼最小二乘法这两种常用的光学自动设计程序的特点和使用方法。
第3部分是变焦距光学系统的原理与程序,讨论了变焦距光学系统的像差计算与自动设计问题。
第4部分是光学系统的公差分析与计算,介绍了公差分析计算软件的原理与编程特点。
第5部分是光学系统的环境温度分析与无热设计,讨论了环境温度对光学系统的影响及利用衍射光学元件进行无热设计的原理与方法。
第6部分是典型光学系统设计,应用所介绍的光学设计程序对望远系统、显微镜物镜和照相物镜等进行了实际设计,并对所设计的例子进行了像质评价。
第7部分是对偏振像差、非球面应用、计算机辅助光学装调、衍射光学元件、非成像光学系统、空间光学系统、红外光学系统以及其它一些光电系统进行了介绍。
本课程主要是要让学生学会掌握光电仪器设计的理论和实际知识,学习光学设计的像差理论和像差校正方法,掌握国际上流行的光学设计软件的基本使用方法。
二、课程的特点与自学方法于本课程属于继续工程教育教学环节中的自学函授课程,建议学生在各章思考题的引1导下,结合课本学习相关知识。
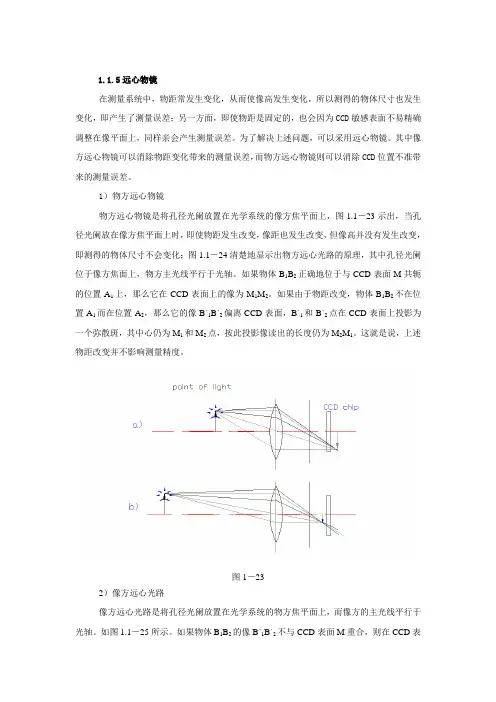
1.1.5远心物镜在测量系统中,物距常发生变化,从而使像高发生变化,所以测得的物体尺寸也发生变化,即产生了测量误差;另一方面,即使物距是固定的,也会因为CCD敏感表面不易精确调整在像平面上,同样亲会产生测量误差。
为了解决上述问题,可以采用远心物镜。
其中像方远心物镜可以消除物距变化带来的测量误差,而物方远心物镜则可以消除CCD位置不准带来的测量误差。
1)物方远心物镜物方远心物镜是将孔径光阑放置在光学系统的像方焦平面上,图1.1-23示出,当孔径光阑放在像方焦平面上时,即使物距发生改变,像距也发生改变,但像高并没有发生改变,即测得的物体尺寸不会变化;图1.1-24清楚地显示出物方远心光路的原理,其中孔径光阑位于像方焦面上,物方主光线平行于光轴。
如果物体B1B2正确地位于与CCD表面M共轭的位置A1上,那么它在CCD表面上的像为M1M2。
如果由于物距改变,物体B1B2不在位置A1而在位置A2,那么它的像B´1B´2偏离CCD表面,B´1和B´2点在CCD表面上投影为一个弥散斑,其中心仍为M1和M2点,按此投影像读出的长度仍为M2M1。
这就是说,上述物距改变并不影响测量精度。
图1-232)像方远心光路像方远心光路是将孔径光阑放置在光学系统的物方焦平面上,而像方的主光线平行于光轴。
如图1.1-25所示。
如果物体B1B2的像B´1B´2不与CCD表面M重合,则在CCD表面M上得到的是B´1B´2的投影像,其散斑中心距离M1M2=B´1B´2。
因此,不管CCD表面M是否和B´1B´2相重合,它和标尺所对应的长度总是B1B2,所以没有测量误差。
图1-24图1.1-25 像方远心光路1.1.6远距物镜远距物镜是一种焦距很长而镜筒较短的物镜,从物镜前表面到像平面的距离小于焦距,这对于长焦距物镜来说,有利于缩短物镜的轴向尺寸。
光学系统设计的要求任何一种光学仪器的用途和使用条件必然会对它的光学系统提出一定的要求,因此,在我们进行光学设计之前一定要了解对光学系统的要求。
这些要求概括起来有以下几个方面。
一、光学系统的基本特性光学系统的基本特性有:数值孔径或相对孔径;线视场或视场角;系统的放大率或焦距。
此外还有与这些基本特性有关的一些特性参数,如光瞳的大小和位置、后工作距离、共轭距等。
二、系统的外形尺寸系统的外形尺寸,即系统的横向尺寸和纵向尺寸。
在设计多光组的复杂光学系统时,外形尺寸计算以及各光组之间光瞳的衔接都是很重要的。
三、成象质量成象质量的要求和光学系统的用途有关。
不同的光学系统按其用途可提出不同的成象质量要求。
对于望远系统和一般的显微镜只要求中心视场有较好的成象质量;对于照相物镜要求整个视场都要有较好的成象质量。
四、仪器的使用条件在对光学系统提出使用要求时,一定要考虑在技术上和物理上实现的可能性。
如生物显微镜的放大率Г要满足500NA≤Г≤1000NA条件,望远镜的视觉放大率一定要把望远系统的极限分辨率和眼睛的极限分辨率一起来考虑。
光学系统设计过程所谓光学系统设计就是根据使用条件,来决定满足使用要求的各种数据,即决定光学系统的性能参数、外形尺寸和各光组的结构等。
因此我们可以把光学设计过程分为4 个阶段:外形尺寸计算、初始结构计算、象差校正和平衡以及象质评价。
一、外形尺寸计算在这个阶段里要设计拟定出光学系统原理图,确定基本光学特性,使满足给定的技术要求,即确定放大倍率或焦距、线视场或角视视场、数值孔径或相对孔径、共轭距、后工作距离光阑位置和外形尺寸等。
因此,常把这个阶段称为外形尺寸计算。
一般都按理想光学系统的理论和计算公式进行外形尺寸计算。
在计算时一定要考虑机械结构和电气系统,以防止在机构结构上无法实现。
每项性能的确定一定要合理,过高要求会使设计结果复杂造成浪费,过低要求会使设计不符合要求,因此这一步骤慎重行事。
二、初始结构的计算和选择、初始结构的确定常用以下两种方法:1.根据初级象差理论求解初始结构这种求解初始结构的方法就是根据外形尺寸计算得到的基本特性,利用初级象差理论来求解满足成象质量要求的初始结构。
1. 人眼的角膜可认为是一曲率半径r=7. 8mm 的折射球面,其后是n 二4/3的液体。
如果看起来瞳孔在角膜后3.6mm 处,且直径为4mm,求瞳孔的实际位置和直2•在夹锐角的双平面镜系统询,可看见自己的两个像。
当增大夹角时,二像互相 靠拢。
设人站在二平面镜交线前2m 处时,正好见到自己脸 孔的两个像互相接触, 设脸的宽度为156mm,求此时二平面镜的夹角为多少?3、夹角为33度的双平面镜系统,当光线以多大的入射角入射于一平面镜时,其 反射光线再经另一平面镜反射后,将沿原光路反向射出?4、有一双平面镜系统,光线以与其中的一个镜面平行入射,经两次反射后,出 射光线与另一镜面平行,问二平面镜的夹角为多少?5、一平面朝前的平凸透镜对垂直入射的平行光束会聚于透镜后480mm 处。
如此 透镜凸面为镀铝的反射面,则使平行光束会聚于透镜前80mm 处。
求 透镜的折射 率和凸面的曲率半径(计算时透镜的厚度忽略不计)。
解题关键:反射后还要1x(-4.16)4/3x( - 3 6)x4 = 3.47(mm) ?*=一3.6,2卩=4 H x宀 1 4/3 1-4/37~7=^r=>r 一- -7.8? =-4.16(mm)解题关键2反射后还要经过平面折射_唧2 tanf ?' 亠 ”仃—-—= ----- =_ =円=>心=-lo0«80tanj I:.Z3 = 1.5 込=-2406、人眼可简化成一曲率半径为5. 6mm 的单个折射球面,其像方折射率为4/3,求 远处对眼睛张角为1度的物体在视网膜上所成像的大小。
本题关键:通过球心的光线方向不变,球心为节点。
2y'= 2(/-r>£0.5° 城 _ n-n刈 4/3f'= ------- r =--------------- x 5.6 =22.4(加初)4/3-12y*= 2(22.4 — 5.6)瑕 05。
精品文档 。 233欢迎下载 第十八章 摄影和投影物镜设计
摄影物镜通常是指照相机、电影和电视摄像机中的镜头。摄影物镜的作用是把外界的景物成像在感光胶片、电荷耦合器件(CCD)等接收器上。胶片、CCD以及其他接收器的尺寸通常比外界景物小得多,因此,摄影物镜是使物体缩小成像的。另外,摄影物镜的焦距通常在几毫米到几百毫米之间,而要拍摄的外界景物与摄影物镜的距离跟物镜的焦距相比是相当大的。当物距大于焦距的30以上时就可视为无穷远成像。在绝大多数情况下,外界景物是大于这个距离的,因此摄影物镜可视为对无穷远目标成像。 还有一类物镜,它与摄影物镜相反,是把记录在胶片或其他介质中的图样或图像放大成像到屏幕上,这类物镜称之为投影物镜或放映物镜,电影放映物镜就是其中典型的例子。 除普通照相物镜外,摄影物镜还包括用于航空测量和空中侦察的航空照相物镜、把实物和画面用照相腐蚀方法制成印刷用版的制版物镜等。
§1 摄影物镜的光学性能 决定摄影物镜光学特性的参数有三个:焦距/f,相对孔径/fD,视场2。 1 焦距 摄影物镜的焦距/f,决定了物体所成像的大小,或者说决定了照片上的像与实际物体之间的比例。用不同焦距的摄影物镜对同一位置的某物体进行摄影,焦距大者,所拍摄得的像也大。这可以从放大率公式看出,
xfxfyy// 可知当/f大时,垂轴放大率大,即得到比较大的像。 实际上由于摄影物镜的物距一般情况下都很大,可按物在无限远考虑,此时成像于焦面上,则有: tgfy
//
可见,对一定大小的物体,像的大小和物镜的焦距成正比,对于远距离摄影和航空摄影,若利用普通短焦距照相物镜,由于成像比例小,所成像太小,难以辨认目标,这时需用长焦距物镜,焦距可达1米以上。由于摄影物镜用途不同,焦距范围也不一致。普通用照相机焦距多在mm100以下。#135相机的常用镜头焦距为mm35,#120相机常用镜头焦距为mm75。
2 视场 摄影物镜的视场2,决定了所拍摄的物空间范围。一般用物空间的角度范围表示。在照相机内,底片框起着视场光阑的作用,视场即由其决定。此框多是长方形的,故视场有时也用像平面被框所限定的底片的长和宽表示。 例如:mm16电影摄影机 25.74.10mm, mm35电影摄影机 21622mm, #135照相机 22436mm,#120照相机 25555mm。 在一定的底片大小条件下,摄影物镜的焦距和视场二因素是矛盾的。焦距大,则视场小,反之视场大,则焦距小。要根据物镜用途决定视场值。一些长焦距物镜视场只有几度。在计算摄影物镜的视场角时,一般按画面的对角线计算像高,即按最大的视场角计算。 通常视场超过060,可称为广角物镜。航空摄影测量用物镜需要一次拍摄较大的幅面,视场很大,可达00120~100。
3 相对孔径 相对孔径/fD,决定了像面照度。像面上照度与物镜相对孔径的平方成正比。在摄影时射入系统到达底片的光能量是由相对孔径和曝光时间两个因素决定的。为了获得相同的光通量,当相对孔径缩小2倍时,曝光时间需要增至4倍。但由于拍摄的目标常常是活动的,精品文档 。 234欢迎下载 曝光时间必须很短。曝光时间稍长,由于目标移动将使照片模糊不清,故要求摄影物镜有较大的相对孔径。特别是对于高速运动的目标或者在微弱的光照条件下拍照都要求有较高的相对孔径。在照相机中设有孔径可变的光阑以调节其孔径。在照相机外面镜圈上的刻度值就表
示相对孔径大小,由于像面照度与相对孔径的平方成正比,所以相对孔径按21等比级数变化。即分度值为: 1:1,4.1:1,2:1,8.2:1,4:1,6.5:1,8:1,11:1,16:1,22:1,32:1 为了简便,在镜圈上的标记是上述数值的倒数,称为光圈数。即为: 1,1.4,2.8,4,5.6,8,11,16,22,32。 通常相对孔径超过3:1称为大孔径物镜,在照相物镜中,孔径光阑通常放在物镜的透镜之间。入射光瞳是此孔径光阑经其前面透镜所成的像,也常在物镜系统的内部某位置上。孔径光阑决定了轴向光束的孔径D,而斜光束通常是有渐晕的。这是像面边缘照度降低的原因之一。 摄影物镜的焦距、视场和相对孔径三个性能指标之间存在着相互制约的关系。由于像差的限制,不可能要求三者都很大。在照相物镜结构的复杂程度(采用透镜的片数)大致相同的条件下,增大其中一种光学性能都必然会使其它两种性能降低。要使各种光学性能都提高就要求照相物镜的结构更复杂化。另外如果使用上对摄影物镜的成像质量的要求提高,即限制剩余像差更小,则所能达到的光学性能也相应降低。我们只能根据使用要求,提出合理的光学性能指标,来设计摄影物镜,而不应盲目提高要求。 对于照相制版和投影物镜,物位于有限远,除上述光学性能外,还应对物镜的横向放大率提出要求。 与望远镜物镜和显微镜物镜比较起来,摄影物镜突出的特点是视场和相对孔径都比较大。因此在设计摄影物镜时,一般来说七类像差都需要校正。摄影物镜不仅校正初级像差,而且要求在一定程度上校正高级像差,这就决定了摄影物镜的结构一般比较复杂,型式也较多,设计过程也要复杂得多。 由于摄影物镜的结构比较复杂,可供校正像差的因素也就多,所以通常校正初级像差是 比较容易的。在系统能够校正初级像差的条件下,用初级像差和高级像差平衡以后,剩余像差的大小完全由高级像差决定。为了提高像质,或者在一定的成像质量下提高系统的光学特性,都必须减小高级像差。因此从某种意义上来说,如何减小系统的高级像差,往往成为摄影物镜设计的关键。另外,在高级像差一定的条件下,如何利用各种初级像差进行像差平衡,确定最好的像差平衡方案,也是摄影物镜设计的重要方面。这些都是摄影物镜设计与前面讲过的其它光学系统不同的地方。 在光学设计中一般把视场角和相对孔径都比较大的系统,例如投影物镜,复制物镜等等 都归入照相物镜一类中,因为从设计方法来说,它们都是相同的。
§2 摄影物镜的分辨率 分辨率决定物镜对被拍摄物体细节的分辨能力。由衍射理论可知,理想物镜,其对两个物点的极限分辨角为:
D22.1
式中D为物镜的口径。 对于摄影物镜,通常分辨率用对分辨率图案能分辨的条纹密度表示。如物镜恰能分辨某组条纹(再密的条纹就分辨不开了),该组条纹在像面上mm1范围内的条纹数即表示摄影物镜的分辨率。单位符号为mml。 如果物镜焦距为/f,极限鉴别角为,则可区分开的二点的距离为/f,mm1内能分辨开的点数为:
//22.11fDfN
以mm000555.0代入得: 精品文档 。 235欢迎下载 )(15001444//mmlfDfDN 在有些资料中给出如下公式: )(1800/mmlfDN 这是考虑到人眼对线条的分辨能力比对两点的分辨能力要高,因而式中系数稍大些。 上式所表示的是物镜视场中心的理想分辨率,此时分辨率仅决定于相对孔径。但实际摄影物镜的分辨率与许多因素有关。 摄影物镜的成像质量对分辨率有重要影响,由于存在像差使所成像点光能分布与理想像点不同,因而降低了分辨率。对理想分辨率,口径愈大,则分辨率愈高。但实际上由于像差的影响,一个实际物镜其最高分辨率并不对应于其最大相对孔径。当相对孔径比较小时,分辨率随孔径增加而增加,但到一定程度时,孔径再增加,分辨率反而下降。因为相对孔径增加到一定程度,像差严重,影响加大,故反而使分辨率下降。 对照相物镜还有所谓“摄影分辨率”,即用照相物镜对分辨率图案进行拍照,观察在底片上所成像能分辨开的线条数。由于照相底片感光层的膜层有一定的颗粒度,对摄影分辨率有很大影响。颗粒愈细密,则分辨率愈高,反之颗粒愈粗,分辨率愈低。与摄影分辨率对应,通过目视观察(经过显微镜),所得到的物镜分辨率又称为目视分辨率。 由于底片感光层的颗粒度的影响,即使照相物镜的成像是理想的,在底片上所成像的分辨率也只能达到一定的限度。这种由于底片感光膜层颗粒度的限制所决定的分辨率的限度称为底片的分辨率。 照相物镜的目视分辨率MN,底片分辨率PN和摄影分辨率N之间的关系由下面经验公式表示:
PMNNN111 照相物镜的目视分辨率,对不同镜头有较大的差别,有的只有每毫米几十线对,有的达每毫米几百线对。此外,视场边缘的分辨率通常较中心低,有时只及中心分辨率的一半左右。对轴外视场,子午方向与弧矢方向的分辨率也不同。 底片的分辨率因底片质量和用途不同而不同。国产21胶片的分辨率为mml/90~80, 而制版用的超微粒干板分辨率可达mml/200。
§3 摄影物镜设计原则 摄影物镜,其特点是孔径大,焦距长,视场也大。通常摄影物镜视场都是0050~40,广角摄影物镜视场可在0100以上。多数摄影物镜的相对孔径在5.21~41之间,对于强光力物镜相对孔径可达11~21,甚至更高。这样,摄影物镜的像差校正就比较困难,既要校正孔径像差,又要校正视场像差。即各种像差都要考虑,而且还要特别注意校正因相对孔径、视场增大而产生的高级像差。 对于摄影物镜,其像差校正的要求与目视仪器不同。摄影物镜是由底片接收像。由于底片感光膜层颗粒度的限制,像差校正得过分完善并不能明显地提高摄影分辨率,故其像差校正的要求比目视仪器低。其像差的容限就不能用瑞利准则衡量,而常常超出许多倍。许多大口径照相物镜的成像波像差在2~10倍波长之间。 对于摄影物镜,校正像差通常是按物在无限远进行,因为物体相对于摄影物镜的距离较物镜焦距大许多倍,可认为物是在无限远。对于投影和制版物镜可按实际物距校正像差。 由于摄影物镜要求校正各种像差,就导致摄影物镜的结构比较复杂,有各种各样的型式,复杂者由十来个透镜组成。它们在校正像差结构上具有不同的特点。
1 对称型 对于一个完全对称的物镜,就是说光阑位于系统的中间,左右两部分系统结构完全对称,物和像的位罩对系统来讲也是对称的(物像横向放大率等于1),其两部分的横向像差