多学科联合仿真概要
- 格式:ppt
- 大小:2.67 MB
- 文档页数:28

基于Adams与Matlab的汽车电动助力转向系统的联合仿真一、本文概述随着汽车工业的快速发展和环保理念的深入人心,电动汽车在全球范围内得到了广泛的关注和研究。
电动助力转向系统(EPS)作为电动汽车的重要组成部分,其性能直接影响到车辆的操控性和安全性。
对电动助力转向系统进行深入研究,优化其设计,提高其性能,对于推动电动汽车的发展具有重要意义。
本文旨在通过Adams与Matlab的联合仿真,对汽车电动助力转向系统进行深入研究。
介绍了电动助力转向系统的基本原理和结构,分析了其在实际应用中的挑战和难点。
详细阐述了Adams和Matlab在电动助力转向系统仿真中的应用,包括模型的建立、仿真参数的设置、仿真结果的获取和分析等。
通过Adams进行机械系统的运动学和动力学仿真,结合Matlab进行控制系统设计和优化,实现了对电动助力转向系统的全面仿真分析。
本文的研究方法结合了仿真模拟和理论分析,旨在通过联合仿真,对电动助力转向系统的性能进行深入挖掘和优化。
通过对比不同参数和设计方案下的仿真结果,本文为电动助力转向系统的设计和优化提供了有价值的参考。
本文的研究不仅有助于加深对电动助力转向系统的理解,也为电动汽车的发展提供了有益的探索和实践。
通过Adams与Matlab的联合仿真,我们可以更加准确地预测和优化电动助力转向系统的性能,为电动汽车的安全性和操控性提供有力保障。
二、汽车电动助力转向系统概述汽车电动助力转向系统(Electric Power Steering,简称EPS)是一种通过电动机提供辅助转向力矩的先进转向系统。
该系统主要由转向传感器、车速传感器、扭矩传感器、电子控制单元(ECU)和助力电机等组成。
EPS系统的核心在于电子控制单元,它可以根据驾驶员的转向意图、车速以及转向力矩等因素,实时计算出所需的辅助转向力矩,并通过助力电机为驾驶员提供适当的助力。
与传统的液压助力转向系统(Hydraulic Power Steering,简称HPS)相比,EPS系统具有诸多优势。
自适应巡航控制系统的建模与联合仿真1、本文概述随着汽车行业的快速发展,智能驾驶辅助系统已成为现代汽车不可或缺的一部分。
自适应巡航控制(ACC)作为智能驾驶的重要组成部分,可以有效提高驾驶的安全性和舒适性。
本文旨在探索自适应巡航控制系统的建模和联合仿真方法。
通过构建精确的系统模型,结合先进的仿真技术,可以实现对自适应巡航控制系统性能的综合评估和优化。
文章首先介绍了自适应巡航控制系统的基本原理和功能,包括它的发展历史、技术特点以及它在汽车安全驾驶中的作用。
随后,文章阐述了自适应巡航控制系统的建模过程,包括车辆动力学模型、传感器模型、控制算法模型等关键部分的构建方法。
在此基础上,文章进一步介绍了联合仿真的概念及其在实现自适应巡航控制系统性能评估中的优势。
通过联合仿真,可以在虚拟环境中模拟真实的道路场景,全面测试自适应巡航控制系统的响应速度、稳定性和安全性等关键指标。
这种方法不仅降低了系统开发成本,而且提高了开发效率,为自适应巡航控制系统的实际应用提供了有力的支持。
文章总结了自适应巡航控制系统建模与联合仿真的重要性和应用前景,并展望了未来的研究方向。
本文的研究成果将为自适应巡航控制系统的优化和改进提供理论支持和实践指导,促进智能驾驶技术的发展和普及。
2、自适应巡航控制系统的基本原理自适应巡航控制(ACC)是一种智能驾驶辅助系统,旨在通过自动调整车辆的速度和与前车的距离来提高驾驶安全性和舒适性。
其基本原理主要基于车辆动力学、传感器技术和控制理论。
自适应巡航控制系统使用车辆前方的雷达或摄像头等传感器设备来检测前方道路环境和目标车辆的实时信息,包括前方车辆的距离、相对速度和动态行为。
这些信息为系统提供了决策依据。
基于所获得的前方车辆的信息,自适应巡航控制系统计算适当的加速或减速命令,并通过车辆的控制系统实现对发动机、制动系统和其他执行机构的精确控制。
该系统的目标是保持车辆与前车之间的安全距离,并在必要时自动调整速度,以适应前方交通环境的变化。

Dymola—多学科系统仿真平台Dymola 是法国 Dassault Systems 公司的多学科系统仿真平台,⼴泛应⽤于国内外汽车、⼯业、交通、能源等⾏业的系统总体架构设计、指标分解以及系统功能验证及优化等。
Dymola ⽀持 FMI 标准接⼝协议,可⽤于集成不同软件建⽴的、不同详细程度的模型,进⾏MIL、SIL 和 HIL 测试。
产品介绍· DymolaDymola 作为多学科系统仿真平台,提供了多种属性的物理接⼝,覆盖机械、电⽓、热、流体以及控制等领域,结合Dymola 提供的Modelica 基础库和商业库,可⽅便⽤户创建物理系统架构以及不同复杂程度的系统功能模型。
Modelica 基础库为客户提供Modelica协会在机械、流体、电⼦电⽓、电磁、控制、传热等多个⼯程领域的更新研究成果。
Dymola 与各领域的企业和研究所合作,包括 Modelon、DLR、Claytex、Arsenal Research 等,为客户提供具有⾼⽔平的模型库,涵盖空调、蒸汽循环、液冷、电⼒、液压、⽓动、电机驱动、内燃机、传动、车辆动⼒学、柔性体、⽕电、⽔电、风电等领域,为产品的多领域协同研发提供多⾯的⽀撑。
Dymola 的 模 型 可 ⽤ 于 HIL 测 试, ⽀ 持 NI、dSPACE、Concurrent、HiGale、RT-Lab、ETAS 等实时仿真系统。
♦ 电⽓系统模型库针对新能源汽车,Dymola 提供了蓄电池库、燃料电池库、电动系统库、车辆动⼒学库,结合 Dymola 中的电⽓模型库和智能电机库,可⽤于搭建完整的混合动⼒汽车、纯电动汽车模型及供电⽹、充电桩模型,为新能源汽车电⽓系统和整车动⼒学特性的仿真分析和测试提供了完善的模型。
蓄电池模型库包括电池单体、电池组和 BMS,单体模型考虑了温度,寿命,SOC 对电池性能影响,BMS 除传统控制外还可加⼊了主动预防控制等特性。
电动系统库中拥有各类电器元件,并包括详细的半导体元件,如 IGBT,BJT,MOSFET 等,考虑了其瞬态效果与能耗。


虚拟车辆联合仿真及快速方案设计1.背景与挑战随着工业水平和企业竞争力的提升,在国内交通工具领域的产品研发进程中,正向设计的重要性越发显著,在开发拥有自主知识产权的产品时尤其突出。
出于对本钱、竞争力、功能等因素的考虑,设计方案的验证和优化正慢慢成为正向设计所面临挑战的重点。
为缩短研发周期、降低研发本钱,需要在设计初期,成立多个子系统组成的虚拟车辆模型,进行多学科联合仿真,从而快速完成方案的验证和优化设计,并进行整车性能分析。
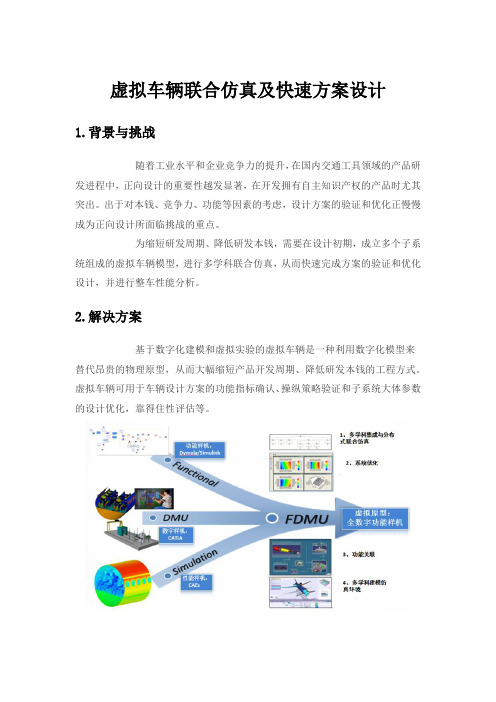
2.解决方案基于数字化建模和虚拟实验的虚拟车辆是一种利用数字化模型来替代昂贵的物理原型,从而大幅缩短产品开发周期、降低研发本钱的工程方式。
虚拟车辆可用于车辆设计方案的功能指标确认、操纵策略验证和子系统大体参数的设计优化,靠得住性评估等。
虚拟车辆快速方案设计可大致分为多学科建模、模型交互、虚拟实验、参数优化等四个部份。
交通工具,如汽车、飞机、列车等,涉及机械、电子电气、液压、气动、传热、操纵等众多学科领域,虚拟车辆需要进行多学科建模。
针对不同的应用领域,恒润提供多种建模工具,基于Dymola中Modelica基础库和商业库,可方便地搭建内燃机、电机、电池、变速箱、传动系、底盘、刹车系统、轮胎、气动系统、液压系统、传热系统、多体系统,等模型,基于PROOSIS中全面的模型库可搭建精准的航空发动机模型,基于Matlab/Simulink可搭建操纵系统模型,基于Adams可搭建多体动力学系统,等。
关于交通工具而言,动力、传动、制动、操纵等子系统间存在紧密的耦合关系,虚拟车辆需要以后自于不同窗科领域的模型,组合成一个系统级模型,并进行联合仿真。
FMI是开放的第三方标准接口协议,任何支持该协议、具有相应接口的软件均能够将模型封装为格式统一、可用于模型交互和联合仿真的黑盒模型FMU,或导入FMU。
将其他软件生成的各子系统对应的FMU导入Dymola成立系统级模型,通过大量虚拟测试用例能够自动地完成多种运行工况的计算,通过对仿真结果的分析,判定系统功能是不是正常、操纵律是不是适合、动力源功率是不是知足要求等,完成对方案的验证和架构的优化。
基于Modelica的多领域建模与联合仿真作者:赵建军,吴紫俊来源:《计算机辅助工程》2011年第01期摘要:为实现多领域建模仿真环境与其他仿真环境的联合仿真,提出基于Modelica多领域建模的联合仿真方案.该方案基于Modelica多领域模型的连接机制,通过Modelica模型与Simulink模块的转换机理,实现在S-Function联合仿真框架下的联合仿真.基于Modelica的多领域物理系统建模仿真工具MWorks与AMESim的联合仿真实例表明:该方法可扩大Modelica模型的应用范围,实现多领域建模仿真平台与其他仿真软件的协同.关键词:多领域建模;联合仿真; Modelica; Simulink中图分类号:TP391.9 文献标志码:Multi-domain modeling and co-simulation based on ModelicaZHAO Jianjun, WU Zijun(National CAD Support Software Engineering Research Center, Huazhong Universityof Science and Technology,Wuhan 430074, China)Abstract: To achieve the co-simulation of multi-domain modeling and simulation environment with other simulation environment, a co-simulation solution based on multi-domain modeling with Modelica is proposed. Based on the connection mechanism of multi-domain Modelica models, the co-simulation under S-Function co-simulation framework is implemented using the converting principle between Modelica models and Simulink modules. A co-simulation example between MWorks which is a multi-domain physical system modeling and simulation tool based on Modelica and AMESim indicates that the method can extend the application of Modelica models and achieve the collaborative work between multi-domain modeling and simulation tools and other simulation software.Key words: multi-domain modeling; co-simulation; Modelica; Simulink0 引言随着仿真技术在一些大规模、多领域问题中的深入应用,人们对仿真精度和规模的要求日益提高,仿真过程的复杂度急剧上升.单领域仿真环境支持大规模仿真已成为仿真的瓶颈,而采用多领域物理统一建模仿真和联合仿真技术[1]成为解决该问题的有效方法.多领域建模仿真技术是基于统一建模语言、被广泛接受的一种建模仿真方法.Modelica是目前盛行的多领域物理系统建模语言,主要基于方程的陈述式建模语言,采用数学方程描述物理规律和现象,通过微分代数方程系统实现仿真运行,具备模型重用性高、建模简单方便以及模型贴近实际物理系统等优点.[2]同样,联合仿真技术也可实现多领域复杂模型的仿真.将复杂物理模型按学科领域划分为多个单领域的模型,利用单学科的专业软件建立相应的单领域模型,通过单领域软件间的交互接口等方式实现数据交换和调用,完成复杂物理模型的仿真.目前,国际上已有基于Modelica的建模仿真工具,这些工具的基本单元是Modelica组件[3],即各领域系统的基本元件.同时,联合仿真技术也被广泛研究和应用.(1)基于软件已有接口的联合仿真.现有仿真软件可通过其提供的接口导出仿真结果或者将模型转换为其他软件可读取的格式,在某个运行环境中实现不同仿真软件模型的联合仿真.该方式成本较低,已被广泛运用于工程中.(2)基于HLA/RTI框架的联合仿真[4].该方式通过接口标准HLA(High Level Architecture)所规定的模型描述规范和接口规范,通过运行时间支撑(Run Time Infrastructure,RTI)系统,实现联邦成员间的通信.其核心是仿真管理服务,包括仿真联邦管理和TTI联邦管理.该框架是联合仿真的高层软件体系框架,现已被运用于模拟军事演习系统中.基于Modelica统一建模仿真技术可实现多领域间的无缝集成,实现多领域在同一平台下的建模仿真,该技术以其统一协同的理念已开始应用于工程中.单领域的仿真软件尽管在其领域范围内被广泛认同,且有深厚的积累,但只限于该专业领域内;而联合仿真技术可将Modelica技术与单领域仿真软件的优势进行集成,实现优势互补.本文围绕联合仿真技术,以基于Modelica的多领域物理系统建模仿真工具和液压专业优势软件AMESim的联合仿真为例,说明利用Modelica工具的多领域优势和AMESim的液压领域优势进行建模和仿真的方法,探讨利用多领域物理建模软件和专业优势软件进行联合仿真的方法,详细分析基于软件接口的建模软件的联合仿真方法,为基于Modelica技术的多领域仿真系统与其他仿真系统的联合建模和仿真提供技术框架.1 联合仿真接口Modelica模型采用数学方程描述不同领域子系统的物理规律和现象,根据物理系统的拓扑结构,基于语言内在的组件联接机制,实现模型构成和多领域集成[5],即Modelica模型是面向对象的数学模型,其基于物理系统数学表示的内在一致性,支持在一个模型中包含多个领域的模型组件,实现多领域建模.模型主要依赖其连接器进行联合仿真.[6]连接器是Modelica中约束类connector的实例,通常作为模型组件的类成员充当模型组件与外界的接口或端口.图1中的Pin是Modelica中电气组件的连接器类,其Modelica代码为只能在组件之间的同类连接器之间建立连接,通过方程实现,说明Modelica支持非因果连接.图2是3个Pin实例的连接及Modelica代码与等效方程.模型或组件之间借助连接器连接,实现不同模型或组件之间的数据交换.在Modelica模型的联合仿真过程中,Modelica模型也可使用连接器实现与其他模型的通信.图3表明Modelica 模型与连接器的关系,可使用Modelica模型的连接器定义模型的输入和输出,通过连接器通信实现Modelica模型与其他模型的数据交换.图 3 Modelica模型与连接器的关系Fig.3 Relationship between Modelica modeland its connectorAMESim提供与Excel,Matlab,Simulink和MSC Adams等软件的接口,这些接口均可将AMESim模型转换为对应仿真平台可读取的格式,使模型能在其他平台中求解.在仿真求解前,模型均需编译.在编译模型时,会生成该模型的C代码,其中包含模型的相关信息,可被仿真平台读取.为使该模型可被其他仿真平台使用,实现与其他仿真环境模型的联合仿真,可将该模型的C代码转换为其他仿真平台可读取的格式,或直接在该模型编译时控制编译的生成结果,直接生成能被其他平台读取的格式.AMESim本身提供与Simulink的接口,可将其自身模型转换为S-Function块;而Modelica 模型也可在编译时控制其生成该模型的S-Function块,从而实现Modelica多领域模型与其他仿真环境模型的联合仿真.2 联合仿真环境AMESim 模型经过编译和参数设置等生成供Simulink 使用的S-Function后, 在Simulink 环境中,利用AMESim的接口将建好的包含其他Simulink 模块的AMESim模型当作一个普通的S 函数添加到系统的Simulink 模型中,实现AMESim 与Simulink 的联合建模和仿真.AMESim可将模型转换为Simulink的模块.只需将Modelica多领域模型转换为Simulink模块,即可实现AMESim模型与Modelica模型的数据交换,从而在Simulink环境中实现Modelica工具与AMESim的联合仿真.联合仿真方案见图4.转换后,模型均为S-Function,在Simulink中的仿真流程见图5.在进行Modelica多领域模型转换时,采用Simulink的C代码S-function机制,将Modelica模型转换为Simulink块,转换后的Modelica模型必须符合Simulink块的数学模型定义,即满足如图6所示的数学关系.在Simulink中,将创建的Modelica多领域模型作为自定义块加入到“Simulink Library Browser”中,通过设置该自定义块的Mask和回调函数,实现块的参数设置和块仿真时状态的控制图 5 仿真流程Fig.5 Simulation process3 联合仿真实例液压机械模型是由液压、机械及控制等3部分组成的复杂系统.建模时,将系统拆分为机械和液压部分2个子模型,在MWorks中建立机械部分子模型,在AMESim中建立液压部分子模型,将建好的模型放到统一的运行环境中进行联合仿真.通过使用不同软件建立系统子模型的方法,验证多领域软件与其他软件联合仿真的可行性.根据所需的机械模型,在MWorks中直接拖拉Modelica模型库中的组件,合理设置各个组件参数,然后使用连接工具连接各个组件的连接器,组成完整的多领域模型系统.在建模过程中,为实现Modelica模型与其他软件模型的联合仿真,即实现Modelica模型与其他软件建立的模型之间的数据交换,需对Modelica模型进行数据接口的定义,见图7.在Modelica模型中定义1个输入接口、4个输出接口,见表1.输入接口接收外部数据,输出接口将Modelica模型中计算的数据输出到其他软件模型中,采用MWorks机械转动库中角速度传感器采集的4个转子的角速度数据,在联合仿真时通过这些接口与其他模型交换数据.如果在Modelica中没有定义数据交换接口,则在联合仿真时不能与其他模型进行数据交换,即不能进行联合仿真.因此,在建模过程中应根据系统模型的需要定义完整的Modelica模型数据交换接口.Modelica多领域模型完成后,需建立联合仿真系统的液压模型.在AMESim中直接调用各种液压元件模块,合理设置各元件的参数,也可利用HCD 库中的模型搭建所需的元件,然后将各元件连接成完整的液压回路.[7]建模时按实际系统在模型库中选取元件并进行油路连接,然后设置模型参数.一般可选择CoSim接口实现联合仿真,图8为联合仿真的AMESim 液压模型.在联合仿真的液压模型中需设计合理的数据交换接口,实现液压模型数据的输入输出.表2为液压模型联合仿真的接口.由图8可知,模型输出液压马达的转角数据,同时需其他模型输入对其输入阀的控制信号.在进行联合仿真前,需对AMESim模型进行编译.此时,可将定义完整的数据交换接口的液压与机械模型转化为S-Function模块,在Simulink环境中实现联合仿真.将MWorks的Modelica机械模型和AMESim的液压模型导入到Simulink中,并将液压模型的iname接口与机械模型的m_in接口连接,根据需要还可使用Simulink中的信号模块对联合仿真模型提供信号的输入.其MWorks的Modelica多领域模型与AMESim液压模型的联合仿真模型见图9.液压模型输出的马达转角为Modelica模型的转角输入.在此联合仿真模型中,可使用Simulink中的工具对AMESim模型进行反馈控制.在仿真时,AMESim模型与MWorks模型分别使用各自的求解器求解,仅通过接口交换数据.图 8 联合仿真的AMESim液压模型上述联合仿真模型包含2部分:AMESim液压模型与MWorks的Modelica多领域模型,还包含有Simulink的电源和示波器模块.联合仿真模型的输入是Simulink中的正弦波信号,同时该信号也是液压模型输入信号,控制液压模型的电磁换向阀.联合仿真模型输出机械模型4个转子的转角速度.在联合仿真模型中,液压模型的输出(即液压马达的转角速度)是机械模型的输入.在仿真时,联合仿真模型按相同的步长调用各自的求解器进行仿真.在每个步长中,液压模型的输出均输出给机械模型进行数据交换,在开始仿真时,随着液压模型输入正弦信号的增强,换向阀P-B的油路开口逐渐变大,进而流量增大,使得液压马达反向转速逐渐增大,见图10;当输入的正弦信号减小时,P-B油路开口减小,马达的转速减小,逐渐趋于0.当输入的正弦信号小于0时,马达正向加速旋转,此时当正弦信号趋于0时,马达正向减速旋转.机械模型接收到液压模型的输入时,其左边2个转轴(J1和J2)立即开始转动,而第2个转轴(J2)前有正弦刹车信号,则给转轴的角速度从0开始增大.后2个转轴(J3和J4)的刹车信号为阶跃信号,其阶跃信号的触发时间为1 s和2 s,则这2个转轴在和2 s时开始转动,见图11.因此,MWorks与AMESim的联合仿真可行,进而表明基于Simulink的S-Function机制的Modelica多领域模型与其他仿真环境模型的联合仿真可行.4 结束语针对多领域仿真软件和专业优势仿真软件各自的优势,分别介绍Modelica模型和AMESim模型与Simulink的接口技术,着重研究Modelica工具与AMESim间的联合策略.在此基础上,提出基于-的Modelica模型与其他仿真软件模型的联合建模仿真技术框架,同时进行验证.这种联合仿真建模技术框架充分发挥多领域统一建模技术和联合仿真技术的优势,适合多领域模型与其他单领域模型复杂系统的联合仿真.参考文献:[1]-A unified object-oriented language for system modeling and simulation[C]// ERIC H Proc 12th European Conf on Object-oriented Programming, Brussels: Springer-Verlag, 1998: 67-90.[2]袁平鹏陈青茶, 圹坪, 等. 基于网格的联合仿真平台[J]. 华中科技大学学报:自然科学版, 2007, 35(S2): 1-3.simulation platform[J]. J Huazhong Univ of Sci & Technol: Nat Sci, 2007, 35(S2): 1-3.[3]吴义忠刘敏, 陈立平. 多领域物理系统混合建模平台开发[J]. 计算机辅助设计与图形学学报, 2006, 18(1): 120-124.multi-domain physical system[J]. J Computer-Aided Des & Comput Graphics, 2006, 18(1): 120-124.[4]曹琦何中市, 余磊, 等. 基于 HLA/RTI 的联合仿真建模技术框架[J]. 系统仿真学报-2924.simulation based on HLA/RTI[J]-2924.[5]赵建军丁建完, 周凡利, 等. Modelica语言及其多领域统一建模与仿真机理[J]. 系统仿真学报, 2006, 18(2): 570-573.multi-domain unified modeling and simulation[J]. J Syst Simulation, 2006, 18(2): 570-573.[6]丁建完陈立平, 周凡利, 等. 复杂陈述式仿真模型的相容性分析[J]. 软件学报, 2005, 16(11): 1869-1875.declarative simulation models[J]. J Software, 2005, 16(11): 1869-1875.[7]in MWorks: a platform for modeling and simulation of multi-domain physical systems based on Modelica[C] // The Modelica Association. Proc 5th Int Modelica Conf, Vienna, Austria, 2006:733-740.(编辑于杰。
一种多 FMU 模型联合仿真推进方法及系统本文介绍了一种多 FMU 模型联合仿真的推进方法及系统,该方法基于功能样机接口规范,通过 Simulink 模型转换为 Modelica 模型,并在 Modelica 仿真平台上调用 FMU 接口实现多领域建模仿真。
1. 背景介绍多领域建模仿真是指在不同领域(如机械、电气、控制等)之间进行模型交流和联合仿真,以实现复杂的系统设计和优化。
在这种情况下,不同领域的模型需要通过某种方式进行交互和连接。
FMU (Functional Mock-up Unit)是一种被广泛使用的功能样机接口规范,它定义了模型之间的接口和数据交换格式,使得不同的模型可以在同一个仿真平台上进行联合仿真。
2. Simulink 转 Modelica 模型Simulink 是 Matlab 中的一种图形化仿真工具,广泛应用于控制系统设计和信号处理等领域。
Modelica 是一种基于方程的仿真语言,适用于多领域建模和仿真。
为了实现多领域建模仿真,需要将Simulink 模型转换为 Modelica 模型。
转换过程包括模型结构的转换和模型参数的映射。
通过这种方式,可以将 Simulink 模型中的方程和数据传递给 Modelica 模型,以便在 Modelica 仿真平台上进行联合仿真。
3. FMU 接口调用在 Modelica 仿真平台上,可以通过调用 FMU 接口实现不同模型之间的数据交换和控制。
FMU 接口提供了一组标准的数据结构和函数,用于在模型之间传递和处理数据。
调用 FMU 接口需要指定 FMU 类型和 FMU ID,不同类型的 FMU 适用于不同的数据交换场景。
通过在 Modelica 模型中嵌入 FMU 接口,可以实现与 Simulink 模型的联合仿真,从而实现多领域建模仿真。
4. 系统实现本发明提出了一种多 FMU 模型联合仿真的推进方法及系统,该系统包括以下组件:Simulink 模型转换组件、Modelica 模型构建组件、FMU 接口调用组件和仿真控制组件。
首页>> 科技资讯>> 实用宝典AMESim与ADAMS联合仿真操作说明摘要:物理系统可能由各种元件组成,例如气动的,机械的,液压的,电子的以及控制系统等,所有的元件协同工作。
多学科领域系统和复杂多体系统之间的相互作用很难在单一的软件平台中来仿真。
解决的方案就是通过AMESim和专用的多体动力学软件ADAMS之间的接口,使得两者在仿真中协同工作。
本文结合天线的简单实例介绍AMESim与ADAMS联合仿真的操作过程。
关键词:AMESim ADAMS 联合仿真1.引言AMESim(Advanced Modeling Environment for Simulation of engineering systems)软件是由法国IMAGINE公司于1995年推出的多学科复杂领域系统工程高级建模和仿真平台,该软件不要求用户具备完备的仿真专业知识,采用面向系统原理图建模的方法,便于工程技术人员掌握和使用。
机构动力学分析软件ADAMS (automatic dynamic of mechanical system)集建模、求解和可视化技术于一体,能有效分析和比较多种参数方案。
运用AMESim与ADAMS的联合仿真,可以有效的对设备的动态过程进行分析,根据交互分析产生的结果来评价设备的性能,为了更加真实的符合实际情况,理论分析用来完成检验产生的数值结果。
这种虚拟产品开发方法与得出的结论将对设计人员提供一定帮助。
通过AMESim/ADAMS之间的接口,有两种方式实现联合仿真:(1)将模型从一个平台中输入到另一个平台中,采用单一的积分器进行计算。
(2)各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。
2.软件环境要求首先AMESim软件需要4.2级以上版本;ADAMS需要2003级以上版本(含A/Control 模块)。
其次必须要有Microsoft Visual C++ 编译器。