基于三角网格法的测头半径补偿方法的研究
- 格式:pdf
- 大小:303.73 KB
- 文档页数:4
坐标测量机测头半径快速补偿方法王卓然;何小妹【摘要】在使用坐标测量机对航空发动机叶片进行测量时,得到的坐标为测头球心坐标,与实际接触点处存在误差.该误差将影响后续的数据.为解决这一问题,提出了一种快速补偿方法.对坐标机测头测量原理进行了研究,分析了测头半径引入的原理.阐述了该方法的过程,并进行设计试验,在Matlab中仿真.通过比较该快速补偿方法与其他传统方法的测量误差,验证了该方法能够在耗时较短的基础上保证补偿精度,可广泛应用于航空发动机叶片测量的测头半径补偿中.该方法对未来航空发动机的精密零部件测量具有重要借鉴的意义.【期刊名称】《自动化仪表》【年(卷),期】2018(039)010【总页数】4页(P96-98,102)【关键词】坐标测量机;测头半径;快速补偿;测量;误差【作者】王卓然;何小妹【作者单位】中国航空工业集团公司北京长城计量测试技术研究所,北京 100095;中国航空工业集团公司北京长城计量测试技术研究所,北京 100095【正文语种】中文【中图分类】TH7;TP2160 引言在航空发动机叶片的测量中,常用坐标测量机来完成叶片型面的测量[1]。
叶片型面测量的实质是对复杂曲面的测量,在测量过程中采用矢量化测量,即沿着法矢方向进行接触式测量。
坐标机得到的叶片点云对应测头球心的坐标,但与实际需要的接触点坐标之间存在误差。
该误差的引入对后续拟合等数据处理存在影响。
因此,需要进行测头半径补偿,以抵消实际轨迹与测量轨迹之间的差异。
目前,坐标测量机广泛采用一种二维在线自动补偿方法,即在测量时,将测量点和测头半径的关系都简单处理成存在偏移,从而自动完成数据的测头半径补偿[2]。
对一些由规则形状组成的表面的测量,如平面等,该补偿方法是准确的。
但对于复杂曲面,如发动机叶片曲面,测量方向和测量点的法矢有可能不一致,用此补偿方法进行补偿会造成补偿误差[3]。
另外,还可根据已知的解析函数表达式,利用对函数表达式求导数,得出各测量点处的法向矢量[4]。
自由曲面CMM测量中球头半径空补偿方法的研究
崔焕勇;李兆前;高琦
【期刊名称】《机床与液压》
【年(卷),期】2006(000)003
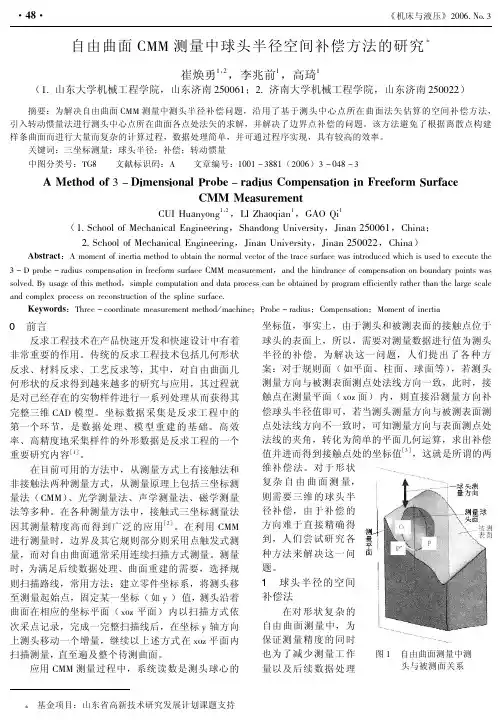
【摘要】为解决自由曲面CMM测量中测头半径补偿问题,沿用了基于测头中心点所在曲面法矢估算的空间补偿方法,引入转动惯量法进行测头中心点所在曲面各点处法矢的求解,并解决了边界点补偿的问题.该方法避免了根据离散点构建样条曲面而进行大量而复杂的计算过程,数据处理简单,并可通过程序实现,具有较高的效率.【总页数】3页(P48-50)
【作者】崔焕勇;李兆前;高琦
【作者单位】山东大学机械工程学院,山东济南,250061;济南大学机械工程学院,山东济南,250022;山东大学机械工程学院,山东济南,250061;山东大学机械工程学院,山东济南,250061
【正文语种】中文
【中图分类】TG8
【相关文献】
1.齿向测量中测球半径补偿方法的研究 [J], 张善钟;李哲
2.自由曲面CMM测量测头半径补偿方法 [J], 蔺小军;王增强;单晨伟
3.踏面测量时测头半径误差补偿方法的研究 [J], 郑凯飞;沈钢
4.CMM测量曲面测头半径补偿与路径规划研究 [J], 王增强;蔺小军;任军学
5.滚刀前刀面径向性测量中的测头半径矢量补偿方法 [J], 卢春霞;劳奇成;王建华
因版权原因,仅展示原文概要,查看原文内容请购买。
考虑半径补偿的三坐标测量数据精确配准方法
索瑞;卜昆;程云勇
【期刊名称】《航空制造技术》
【年(卷),期】2012(000)008
【摘要】叶片模型的配准定位是叶片形状检测分析的一个核心环节,针对涡轮叶片的三坐标测量数据在基于迭代最近点的配准定位中与CAD模型表面点的配准关系不对应的问题,提出一种考虑半径补偿的精确配准方法.在求取配准点集的过程当中考虑到半径补偿,使得测量点集与待配准点集之间的关系相对应,进而获取更高的配准精度.进行基于仿真数据的配准试验及对比,给出了基于实测数据的应用与分析,验证了该方法的精确性与实用性.结果表明,考虑半径补偿的三坐标测量数据精确配准方法是可行的.
【总页数】3页(P92-94)
【作者】索瑞;卜昆;程云勇
【作者单位】西北工业大学现代设计与集成制造技术教育部重点实验室;西北工业大学现代设计与集成制造技术教育部重点实验室;西北工业大学现代设计与集成制造技术教育部重点实验室
【正文语种】中文
【相关文献】
1.两坐标与三坐标雷达配准方法及其应用分析 [J], 张殿程;江晶;陆泳舟
2.三坐标测量机械头半径对测量数据的影响及其消除方法 [J], 全荣;翁玲
3.三坐标测量机测头半径补偿的新方法 [J], 颉赤鹰;陈少克
4.三坐标测量数据的多视配准研究 [J], 刘晶
5.测量数据和区域精度加权的模型配准方法 [J], 谭高山;刘胜兰;张丽艳
因版权原因,仅展示原文概要,查看原文内容请购买。
光学非球面三坐标测量中的像散补偿范晓明;罗词金;徐学科;吴令奇;胡晨【摘要】利用三坐标测量仪在光学非球面镜研磨与粗抛阶段进行面形检测时,测量结果常由于补偿程序不完善而出现像散误差.本文分析了非球面三坐标测量得到的数据,指出测量结果中出现像散误差是测头半径补偿不准确所致.然后,提出了一种离线数据处理方法对测量数据进行补偿来消除像散误差.该方法通过计算网格排列的测头中心点行和列方向的切向量得出曲面上每个点的法向矢量;根据测头半径计算出测头球心到接触点的偏移量,从而实现三坐标测量仪的三维测头半径补偿.球面样板实验显示这种方法可以将该样板测量中的像散峰谷值(PV)由4.921 9μm减小到0.065 2μm,基本消除了测量结果中的像散误差,提高了三坐标测量结果的准确度.实验结果验证了提出的三维测头半径补偿程序的有效性.【期刊名称】《光学精密工程》【年(卷),期】2016(024)012【总页数】8页(P3012-3019)【关键词】非球面检测;三坐标测量仪;测头半径补偿;像散补偿【作者】范晓明;罗词金;徐学科;吴令奇;胡晨【作者单位】武汉理工大学材料科学与工程学院,湖北武汉430070;武汉理工大学材料科学与工程学院,湖北武汉430070;中国科学院上海光学精密机械研究所强激光材料重点实验室,上海201800;中国科学院上海光学精密机械研究所强激光材料重点实验室,上海201800;中国科学院上海光学精密机械研究所强激光材料重点实验室,上海201800;中国科学院上海光学精密机械研究所强激光材料重点实验室,上海201800【正文语种】中文【中图分类】TH703;TH721光学非球面元件在国防、空间光学等领域的应用越来越广泛,人们对非球面光学加工工艺和检测技术也提出了更高的要求。
非球面轮廓测量法是通过三坐标测量仪或轮廓仪等测量设备获得工件表面各点坐标值,进而分析得到非球面面形误差[1]。
坐标测量法是研磨与粗抛光阶段检测面形的主要方法,也是保证研磨和抛光两个阶段顺利衔接的加工与检测的关键技术[2]。
三坐标测量机测量误差分析及补偿方法的研究三坐标测量机作为高精度仪器,测量误差仍然难以消除。
为了提高三坐标测量机的测量精度,选择合适的误差补偿的方法至关重要。
本文首先对三坐标测量机的测量误差进行分类,分析误差源,然后提出温度热变形补偿和动态误差补偿方法,为进一步研究补偿方法奠定了基础。
标签:三坐标测量机;准静态误差;动态误差;补偿0 引言作为精密测量仪器,三坐标测量机在产品设计、加工制造、检测等领域得到广泛的应用与推广[1]。
但在实际的测量过程中,仍然会有测量误差的产生,如测头测针磨损、测量路径选择不当等因素。
因此,分析误差源并采取合适的补偿方法,是提高测量精度行之有效的途径[2]。
1 三坐标测量机误差分类根据误差特性的不同,可将误差分为准静态误差和动态误差。
准静态误差是指由于外界因素和自身結构引起的误差,而动态误差引起的原因是多方面的,会随时间变化而变化。
2 三坐标测量机误差源分析2.1 准静态误差源分析三坐标测量机静态误差的原因是多方面的,如测量环境的温度、湿度、振动、机导向机构的运动、测头磨损,以及测量方法等不确定因素造成的[3]。
2.2 动态误差源分析三坐标测量机是一个由机体、驱动部分、控制系统、导轨支承、侧头部分、计算机及软件等组成的整体。
测量速度会随着测量任务的变化而经常性的变化,在测量过程中,会受到较大的惯性力。
由于三坐标测量机的运动部件和导轨是弱刚度性,因此运动部件会在惯性力的作用下产生偏转,测针会偏离正交位置并产生动态误差。
由于三坐标测量机的导轨支承的运动精度会随着三轴的移动速度变化而变化,在此过程中会伴随着测头接触力、测头等效半径和冲击力的变化,导致三坐标测量机的移动速度和逼近距离产生偏差,动态误差随之产生。
3 三坐标测量机误差补偿方法3.1 三坐标测量机温度补偿方法三坐标测量机温度补偿主要由三部分组成:标温下结构参数标定、温度实时采集系统和误差补偿系统。
首先测量机利用自身系统获得标准温度下的结构参数,并作为标准结构参数。
三维激光扫描数据三角格网建立方法的研究的开题报告一、选题背景随着科技的不断发展,三维激光扫描技术在日常生活、建筑设计、制造业、文化遗产保护等领域中得到了广泛应用。
三维激光扫描技术可以快速采集物体的大量表面数据,并生成三维模型。
但是,三维激光扫描数据容易出现噪点、缺失等问题,同时数据量较大,需要建立三角格网模型进行处理和分析。
因此,如何有效地建立三角格网模型,成为研究的热点之一。
二、研究目的本文旨在探究三维激光扫描数据三角格网建立方法,以提高数据的准确性和处理效率,为建筑设计、文化遗产保护等领域的应用提供技术支持。
三、研究内容1.三维激光扫描原理及数据处理方法的研究介绍三维激光扫描技术的基本原理,包括采集数据的仪器原理、数据采集方法等,并探究数据处理方法,如噪点过滤、曲面拟合、缺失数据修复等。
2.三角格网建立方法的研究探究三角格网建立的算法,如Delaunay三角剖分、边界约束、法向量处理等,并通过实验比较不同方法的效果和适用场景。
3. 实验验证与分析采用实际三维激光扫描数据,验证不同方法的效果和适用场景,并对结果进行分析和总结。
四、研究意义本文对三维激光扫描数据的处理方法进行探究,为建立高精度三角格网模型提供技术支持。
得到的研究成果不仅可以应用于建筑设计、文化遗产保护等领域,也有助于探索三维激光扫描技术的深入发展。
五、研究方案1.查阅相关文献,了解三维激光扫描技术的原理和应用。
2.采用MATLAB或Python等软件,分析实际三维激光扫描数据,比较不同三角格网建立方法的效果。
3.编写实验报告,总结研究成果,提出改进意见。
六、研究进展目前已经了解三维激光扫描技术的基本原理和应用,并初步探究了三角格网建立方法。
接下来将会采用实际三维激光扫描数据,对不同方法进行分析和探究。
三坐标测量机测头半径实用补偿算法
孙科;贾美薇;田怀文
【期刊名称】《制造业自动化》
【年(卷),期】2009(031)004
【摘要】针对三坐标测量机测量过程中存在的测头半径误差问题,本文提出了采用多次细化测量点的方法.首先沿测量路径方向进行测量点的插值细化;然后在测量路径之间再次进行插值细化;最后对插值细化后整个被测表面上的细化点进行两次插值求导,从而求得每个细化点在X和Y方向的切向量.在此基础上,对两个方向的切向量进行叉积,求得被测表面上各细化点的法向量,最后利用补偿公式进行半径误差计算.
【总页数】3页(P67-68,80)
【作者】孙科;贾美薇;田怀文
【作者单位】西南交通大学,机械工程学院,成都,610031;西南交通大学,机械工程学院,成都,610031;西南交通大学,机械工程学院,成都,610031
【正文语种】中文
【中图分类】TP391
【相关文献】
1.三坐标测量机测头半径补偿的新方法 [J], 颉赤鹰;陈少克
2.三坐标测量机测头半径补偿实用算法 [J], 孙科;田怀文
3.三坐标测量机测头半径补偿技术及应用 [J], 王红敏
4.三坐标测量机测头的测球半径补偿误差的计算 [J], 王红敏;石沛林
5.三坐标测量机的测头半径补偿与曲面匹配 [J], 李春;刘书桂
因版权原因,仅展示原文概要,查看原文内容请购买。
测绘技术三角网形成方法介绍测绘技术作为一门重要的地理信息科学领域,广泛应用于土地调查、城市规划、工程建设等各个领域。
而在实施测绘任务中,三角网是其中一种常用的测量方法。
本文将为大家介绍测绘技术中三角网的形成方法。
一、三角网的概念和作用三角网是指由一系列测量的三角形构成的网状结构,用于建立点之间的空间坐标关系。
它是测绘技术中的基础,可以用来计算未知点的坐标和测量点的位置。
此外,三角网还可以提供地理信息的准确性和可靠性保证,为其他地理信息系统的建立提供支持。
二、三角网形成的目的三角网的形成是为了建立一个几何联系紧密、且坐标准确的点集合。
通过三角网,可以在大范围内进行地图制图、测量变形和形状变化、进行建筑工程等方面提供支持。
三、三角网的形成方法1. 辐射法辐射法是三角网形成中最常用的方法之一。
它以一个或多个已知点作为起始点,辐射出一系列的三角形,确定未知点的坐标。
在辐射法中,需要根据具体情况确定测量的范围和三角形的大小。
2. 平差法平差法是指根据测量数据的误差情况进行调整和修正,以达到测量精度要求。
通过平差法可以提高三角网的准确性和可靠性,减少测量误差对结果的影响。
3. GPS技术全球定位系统(GPS)是一种基于卫星信号的导航技术。
它可以通过接收卫星信号来确定接收机的位置坐标。
在测绘技术中,GPS技术被广泛应用于三角网的形成。
通过GPS技术,可以快速、准确地获得测量点的坐标信息。
四、三角网的应用领域三角网作为测绘技术的重要工具,应用范围广泛。
其中,最常见的应用领域包括:1. 土地调查和测绘:三角网可以用来确定土地边界和土地面积,提供土地规划和土地管理的基础。
2. 建筑工程:通过三角网,可以确定建筑物的位置和坐标,保证建筑工程的准确性和稳定性。
3. 地质调查和矿产资源勘探:三角网可以用来确定地质构造和矿产资源的分布情况,提供地质调查和资源勘探的依据。
4. 城市规划和交通规划:通过三角网,可以确定城市的地理布局和交通网络,为城市规划和交通规划提供依据。
CPⅢ高程控制网精密三角测量数据处理方法探究摘要:随着现代测绘技术的不息进步,CPⅢ高程控制网的精度要求越来越高,对于数据处理方法的探究也变得尤为重要。
本文通过对CPⅢ高程控制网精密三角测量数据处理方法进行探究,以提高高程控制网的精度和可靠性。
1.引言CPⅢ高程控制网是现代测绘中的一个重要组成部分,它可以为地理信息系统、数字地图等提供准确的高程数据。
精密三角测量是测量高程的一种常用方法,其精度取决于数据处理方法的准确性。
因此,对CPⅢ高程控制网精密三角测量数据处理方法进行深度探究具有重要意义。
2.数据处理方法2.1 数据预处理在进行高程测量前,需要对数据进行预处理。
起首,对测量仪器进行校正,以保证测量结果的准确性。
其次,对现场数据进行筛选和清洗,剔除异常值和干扰因素。
2.2 角度观测数据处理精密三角测量的关键是角度观测的准确性。
角度观测数据处理方法主要包括闭合环差、解算方程和权因子的确定等。
闭合环差的计算可以援助评估测量中的误差状况,解算方程则用于求解未知点的坐标和高程数据。
2.3 距离观测数据处理距离观测数据处理是精密三角测量的另一个重要环节。
常见的处理方法包括距离差、路径附加误差和权因子的确定等。
距离差的计算可以援助评估测量的精度,路径附加误差则是对无法测量的距离进行合理预估。
3.高程控制网精度评定为了评估高程控制网的精度,需要对测量结果进行误差分析和精度评定。
误差分析可以援助确定测量过程中的主要误差来源,从而实行相应的措施进行改进。
精度评定方法包括相对精度评定和肯定精度评定等,可以用于裁定高程控制网是否满足要求。
4.案例探究为验证CPⅢ高程控制网精密三角测量数据处理方法的准确性和可靠性,本文以某区域的高程控制网为对象进行了一项案例探究。
通过采集和处理现场数据,得到了具有较高精度的高程数据,并与其他测量方法进行对比。
5.结论经过对CPⅢ高程控制网精密三角测量数据处理方法的探究,可以得出如下结论:数据预处理对于提高测量精度分外重要,角度观测和距离观测数据的处理方法需要合理选择和应用;高程控制网的精度评定可以援助裁定测量结果的可靠性;通过人工测量和现代测绘技术相结合,可以得到更加准确的高程数据。
三坐标测量机的精度提高可通过使用固定补偿模型或自适应补偿模型,或将两者结合起来完成。
固定补偿模型取决于坐标测量机误差的检测结果及所建立的校正表。
例如, 使用激光干涉仪标定的光栅尺校正值表, 可用于坐标测量机光栅尺的线性度补偿。
有研究表明,用三坐标测量机进行测量时,需要对测头半径进行补偿。
在对现有的测头半径补偿方法进行分析的基础上,提出一种“四点共球法”,可以实现对测头半径的补偿。
测量时还能使用自适应补偿模型,这种方法用于正坐标测量机随机发生的几何构成上的变化。
提高坐标测量机精度的成本取决于测量机的重复而不是几何精度。
通过精度提高一般可使几何误差减少80%~ 90% 。
第三种方法是对测量机光栅尺及工件都进行了校正,校正后, 由热膨胀引起的误差可减少80%以上。
温度测量的不确定性及热膨胀系数的变化留下10% ~ 20% 的残差得不到校正。
但当温度迅速变化时, 由于情况变得复杂, 线性温度补偿不能很好地起作用。
l 訇 似 基于三角网格法的测头半径补偿方法的研究 Research on the probe radius compensated Process based on the method of triangle mesh
王淑玉 ,徐铮 ,邵华 WANG Shu—yu。,XU Zheng ,SHAO Hua (1.牡丹江师范学院物理系,牡丹江157012;2.兰州理工大学机电工程学院,兰州730050) 摘要:用三坐标测量机进行复杂曲面测量时,需要对测头进行半径补偿。本文在对比各种测头半径补 偿方法的基础之上,对三角网格法进行了研究。首先依据最小角最大原则对曲面进行三角网 格划分,然后逐次求解每一个三角形的法矢量,并对测量数据进行测头半径补偿。三角网格 法以曲面的法矢量为基础,这有利于测量方向与补偿方向一致,提高半径补偿的精度。 关键词:三坐标测量机,半径补偿方法,三角网格,耳尖移除法 中图分类号:TP391 文献标识码:B 文章编号:1 009—01 34(201 0)08—0081—04 Doi:1 0.3969/j.issn.1 009-01 34.201 0.08.27
0引言 三坐标测量机(C OOrdi n ate M e a s u ri n g Machine,简称CMM)作为一种通用性强、自动 化程度高的高精度测量系统,在先进制造技术与 科学研究中有着极广泛的应用。在广泛采用的接 触式曲面测量方法中,测量得到的数据是测头中 心的坐标值,而非测头与被测量件接触点的坐标 值,为了得到所需的测量表面,需要进行测头半 径补偿。测头半径补偿是基于CMM测量中最关键 的几个问题之一。 目前,最常用的测头半径补偿方法主要有二 维补偿和三维补偿两种方法” 。二维补偿方法是 将测量点和测头半径关系都处理成二维的情况, 并将补偿计算编入测量程序中,在测量时自动完 成数据的测头补偿。这种补偿方法简化了补偿计 算,对一些由规则形状组成的表面测量精确度比 较高,但对于一些自由曲面组成的复合曲面采用 二维补偿就会存在误差。在实际的测量中,常采 用三维补偿法对测头进行半径补偿。最常用的三 维补偿方法有微平面法、拟合法等 。微平面法的 误差会由于点距的稍微增加而急剧增加。拟合法 适用于由单一类型曲面组成的实物外形,对于由 组合曲面形成的复杂表面以及任意无序测量点并 不是一种有效的方法。鉴于此,本文对三角网格 法做了具体的研究。 1三角网格法研究 对测量数据进行测头半径的三维补偿,关 键问题是确定被测轮廓各测点的法向矢量。首 先对输入的各测点对应的测球中心坐标数据进 行三角网格划分,构建三角网格,这样每个三 角网格的法矢方向也就随之确定。由于已知测 头的半径大小,这样就可以对测量数据进行补 偿,从而能够计算出测头和曲面的真实接触点 坐标。 1.1构建三角网格 构建三角网格是采用三角网格法进行测头半 径补偿的第一步,采用合适的三角网格划分方法 有利于确定每个三角网格的法矢方向,从而可以 得到精确的实际测量点。 三角网格划分的方法有很多种,本文采用组 合三角剖分法 进行三角网格划分,组合三角剖分 法是将区域增长法和三维Delaunay ̄lJ分法结合起 来,该方法摒弃二者的不足,充分发挥它们的优 点,从而实现对曲面测量点集的准确划分。组合 三角剖分法的剖分过程主要有以下三步: 1)区域分割。将曲面散乱点集按照一定的规 则划分成多个较小的区域,在每个小区域内, 散乱点的数据量及其拓扑结构的复杂程度都大 为降低。 2)区域内剖分。在各个区域内按照一定的准
收稿日期:2009-12-11 基金项目:黑龙江省教育厅科技技术研究项目(11531392) 作者简介:王淑玉(1967一),女,河北丰南人,副教授,主要从事自动控制、虚拟仪器等方面的研究。
第32卷第8期2010—8 [81】 务l 訇 似 则进行直接三角剖分。由于区域内散乱点的数据 量及其拓扑结构的复杂程度都不足以产生自交现 象,可以充分的发挥直接三角剖分执行速度快的 特点。 3)区域间连接。在各个区域之间按照空球 准则进行三维Delaunay剖分。各区域间差异程 度有时会很大,按照直接剖分的准则去完成连 接,有可能会失败。而三维Delaunay剖分当两 个区域的边界点有些不符合空球准则时,会自 动加入新点,从而有效地实现剖分,即区域间 的连接。同时由于只是各区域的边界点,数量 较少,使用三维Delauna剖分对整个算法的执行 速度影响也不大。 在对测量点进行三角划分时,应采用最小内 角最大准则来选择最优的三角网格。所谓最小内 角最大准则,就是扩展三角形的最小内角,应该 是所有候选三角形的最小内角中最大的。如图l所 示,图中A、B、P、Q为四个测量点,在三角划分 时与AB构成的三角形有AABP、AABq。 BAP 是AABP的最小内角,LABq是AABQ的最小内 角,从图上可以清晰的看出LBAP> ABQ,故 AABQ为最优三角形。按照最小内角最大准则的 约束,在各个区域内即可实现测量点的三角网格 划分。 1=l J_J A 图1最小内角最大准则 1.2计算三角网格的单位法矢 在实际测量时,探针总是从某个方向(一般为z 轴方向)伸出,故测头半径补偿矢量( ̄Pgb法矢)在z 【B2】 第32卷第8期2010—8 轴的分量总是向上的 。故三角网格的法矢方向应 该朝外,如图2所示: A
F C
E D 图2三角网格划分
以图中三角网格PSM为例,在矢量函数中设 矢量一_ , 赢。所以三角网格PsM的单 位法矢量为:
n一
1.3半径补偿 此处以三角形工件为例进行测头半径补偿分 析,测量点即为三角网格PSM的P点。如图3所 示,图中N为测头的中心,0点为坐标系原点,P 为测头与被测工件的实际接触点,在矢量三角形 △OPN中存在如下关系:
—J—J— —J—J ,,'、 oP=oN+NP=oN—PN
式中的矢量 就是测头与曲面实际接触点 的位置,矢量 就是测量系统已知的测头中心 的位置;由于法矢量 垂直于测头球面,所以 法矢量 经过测头球心N;故PⅣ=Rn(为测 头半径),单位法矢量 由式I得到。故式2可 化为:
O—P=O—N一 =O—N—R× (3) = 一PⅣ= 一× r
la X b
通过式(3)就能得到测点P在空间坐标系中的位 置,从而就能得到测量点的坐标值,该坐标值即 为补偿后的实际测量点的坐标。即实际测量点P点 的坐标为:
尸=Ⅳ一 × a x b (4)
IaXbI
a一一a 、1 匐 探头Z
Y X 图3测头半径补偿 综上所述,运用三角网格法进行测头半径补 偿的基本过程是:首先对输入的各测点对应的测 球中心坐标数据进行三角网格划分,构建三角网 格;对测头中心坐标进行测头半径补偿,最后得 到曲面上一系列测点坐标值。 2计算机仿真分析 利用拉伸曲面进行数字仿真计算。构造一个 拉伸曲面作为虚拟测量表面,且此虚拟测量表 面包含有法矢垂直于Z轴的点,然后采用半径为 0.25mm的虚拟测头进行测量并得到测头中心的坐 标点,如图4所示。采用三角网格法对测量数据进 行测头半径补偿,补偿后的坐标点及由这些点构 造的曲面如图5所示。
图4虚拟测量表面及测头中心坐标点
图5补偿后的点及构造曲面 3补偿实例 本文以米老鼠模型测量数据为例,采 网格法与微平面法分别对测量数据进行 偿,然后比较两种补偿方法的精度。在此 的10个测量点为研究对象。图6(a)为在米: 部提取的10个测量点(图中绿色的点即: 点)。
(a)测量点 (b)三角网格 图6测量提取点及网格划分 首先按照本文中三角网格法进行半径: 对测量点进行三角网格划分,求出每个三 单位法矢量。图6(b)为对提取测量点进行三 划分。按照上文中的补偿计算方法对测量 半径补偿,补偿结果见表2。然后采用微平 所选的十个测量点进行半径补偿,补偿结, 3。此实验中所采用的测头半径为0.5mm。 根据补偿前后数据求解补偿偏差,在; 点进行半径补偿时,通常用补偿偏差来反f 点半径补偿精度。由于两种补偿方法都是 矢量之上的,所以两种补偿方法可以采用l 方法进行精度分析。偏差计算公式如下: e=I 一尺l 式中:P P 分别表示补偿前后对应 标:R为测头的半径。
第32卷第8期2030-8 表1补偿前各测量点的坐标 单位:mm 表3微平面法半径补偿后对应测量点的坐标单位:mm 表2三角网格法半径补偿后对应测量点的坐标单位:mm 径补偿时,三角网格法的补偿精度明显高于微平 面法。 4结论 本文对三坐标测量机测量曲面的测头半径补 偿方法进行了研究。在对比各个测头补偿方法的 基础之上提出了运用三角网格法进行测头半径 补偿。文中以米老鼠模型测量数据为例,采用三 角网格法和微平面法两种方法进行半径补偿,经 过比较能明显的看出三角网格法的补偿精度比较 高。
参考文献: 【1]徐丽丽,白万民.接触式测头测量中测头半径31、偿的研究 IJ】.机械工程与自动化,2006;(6):61-62. [2]
依据表4.2、表4.3中的数据,按照式5的计算 【3】 方法计算得: 三角网格法半径补偿偏差为: el=0.001245mm 微平面法半径补偿偏差为: e2=0.003243 lmm 将两种不同的补偿方法所求得的偏差比较, 从数据上可以看出:e <e 。显然,在进行测头半
[841 第32卷第8期2010—8
卢红,张仲甫.坝0头半径补偿的方法【J】.组合机床及自动化 加工技术,2001;(9):39—41. 于舒春,臧希拮,等.曲面散乱点集的组合三角剖分法【JJ. 哈尔滨工业大学学,2008;1l(40):1722—1725. 【4】陈少克,颉赤鹰.CMM测头半径补偿公式中补偿方向的 确定【J】.汕头大学学报(自然科学版),2006;21(1):50—52. [5]李桂花孙绍彬.基于微平面法的空间曲面在线检测的研 究【J】.控制和检测,2008;(8):68—74. 【6】崔焕勇,李兆前,等.自由曲面CMM测量中球头半径空间 补偿方法的研究fJ].机床与液压,2006;(3):48—50.