相位辅助光学三维测量系统的标定方法
- 格式:doc
- 大小:137.50 KB
- 文档页数:37
相移条纹投影三维形貌测量技术综述毛翠丽;卢荣胜;董敬涛;张育中【摘要】结构光三维形貌测量系统目前得到了越来越广泛的应用和研究,相移条纹投影三维形貌精密测量技术是其重要的发展方向.对结构光相移条纹投影三维形貌测量系统的应用发展、工作过程、不同系统构成方式、相移条纹的各种形式及特点、相位误差校正方法、不同相位解包裹算法及其优缺点和适用场合、测量系统数学模型的实现方法及其相应的优缺点、高动态范围测量技术等进行了详细的分析.对相移条纹投影系统的工作流程、实现方法、关键技术的发展及其存在问题等进行了比较全面的梳理,为三维形貌精密测量技术进一步满足先进制造中更高精度的要求指出了后续的研究方向.【期刊名称】《计量学报》【年(卷),期】2018(039)005【总页数】13页(P628-640)【关键词】计量学;三维形貌测量;相移轮廓术;相移条纹;相位解包裹;误差修正【作者】毛翠丽;卢荣胜;董敬涛;张育中【作者单位】合肥工业大学仪器科学与光电工程学院,安徽合肥230009;南阳理工学院机械与汽车工程学院,河南南阳473004;合肥工业大学仪器科学与光电工程学院,安徽合肥230009;合肥工业大学仪器科学与光电工程学院,安徽合肥230009;合肥工业大学仪器科学与光电工程学院,安徽合肥230009【正文语种】中文【中图分类】TB92;TP391.41 引言光学三维形貌测量技术在工业三维测量、文物保护、逆向工程、质量控制、医疗诊断等众多领域中具有广泛的应用,随着计算机技术、投影技术、激光技术、数字图像获取设备等的快速发展,多种光学三维测量技术已经进入商业应用阶段,同时各种新的三维测量方法还在不断涌现。
光学三维测量方法是通过运用适当的光学和电子仪器非接触地获取被测物体形貌的方法和技术[1~2],主要分为被动三维测量和主动三维测量方法。
被动三维测量技术无需辅助的结构光照明设备,直接从多视角二维图像序列中提取物体的三维信息。
48传感器与微系统(Transducer and Microsyslem Technologies)2021年第40卷第6期DOI : 10.13873/J. 1000-9787(2021)06-0048-04基于三维标定板的相机标定方法**收稿日期:2019-11-14*基金项目:国家重点研发计划资助项目(2016YFB0502103 );国家自然科学基金资助项目(61601123 );江苏省自然科学基金资助项目(BK20160696)施佳豪,王庆,冯悠扬(东南大学仪器科学与工程学院,江苏南京210096)摘要:针对传统平面相机标定方法中棋盘角点坐标维度信息缺失的问题,提岀一种基于三维标定板的相机标定方法。
在平面标定的算法基础上,利用角点的三维坐标计算相机的内参系数。
根据标定板角点的世界坐标和像素坐标的对应关系、奇异值分解(SVD)方法,求解相机的投影变换矩阵;再利用旋转向量 的性质计算出相机内参的初始值;最后运用非线性优化方法对所有的标定参数进行整体优化。
实验结果表明:相对于平面标定而言,三维相机标定方法的稳定性更好,标定结果更符合针孔相机模型的投影规律。
关键词:针孔相机;标定;奇异值分解;非线性优化中图分类号:TP391.4 文献标识码:A 文章编号:1000-9787(2021)06-0048-04Camera calibration method based on 3D calibration plate *SHI Jiahao, WANG Qing, FENG Youyang(School of Instrument Science and Engineering ,Southeast University ,Nanjing 210096,China)Abstract : Aiming at the problem of missing comer coordinate dimension in traditional camera calibrationmethod ,a camera calibration method based on three-dimensional (3D) calibration plate is proposed. Based on the algorithm of plane calibration , the three ・climensional coordinates of the corner points are used to calculate theinternal parameter of the camera. According to the correspondence between the world coordinates and pixelcoordinates of the calibration plate corner points and the singular value decomposition ( SVD ) method , the projection transformation matrix of the camera is solved , and the initial value of the camera internal parameters iscalculated by the properties of the rotation vector ・ Finally ,lhe nonlinear optimization method is applied to optimizeall the calibration parameters. The experimental results show that the stability of the 3D camera calibration methodis better than the plane calibration ,and the calibration parameters are more in line with the pinhole camera model .Keywords : pinhole camera ; calibration ; singular value decomposition ( SVD) ; nonlinear optimization0引言随着计算机视觉的不断发展,相机标定成为了一项十 分重要的议题。
结构光系统标定结构光系统标定是一种常用于三维重建和计算机视觉领域的技术。
它通过使用结构光投射器和相机来获取物体的三维形状信息。
在这篇文章中,我们将探讨结构光系统标定的原理、方法和应用。
一、原理结构光系统标定的原理基于三角测量和相机模型。
结构光投射器会发射一系列光条或光斑,这些光条或光斑会投射到物体表面上。
相机会捕捉到这些投射在物体上的光条或光斑,并计算出它们在图像中的位置。
通过分析光条或光斑在图像中的位置和相机参数,可以推导出物体的三维形状信息。
二、方法结构光系统标定的方法可以分为两个步骤:相机标定和投射器标定。
1. 相机标定相机标定是确定相机内外参数的过程。
常用的相机标定方法包括使用棋盘格标定板、球体标定板或多个视角下的特征点标定。
通过在不同位置和角度下拍摄标定板或特征点,可以计算出相机的内参(如焦距、主点位置)和外参(如相机的旋转矩阵和平移向量)。
2. 投射器标定投射器标定是确定投射器的内外参数的过程。
常用的投射器标定方法包括使用棋盘格标定板或特殊的标定物体。
通过在不同位置和角度下投射标定板或标定物体,可以计算出投射器的内参(如投射中心、投射方向)和外参(如投射器的旋转矩阵和平移向量)。
三、应用结构光系统标定在许多领域都有广泛的应用。
1. 三维重建结构光系统标定可以用于三维重建,例如建模文物、建筑物或人体等。
通过获取物体的三维形状信息,可以实现精确的三维重建和测量。
2. 增强现实结构光系统标定可以用于增强现实技术中。
通过将虚拟物体与真实世界进行对齐,可以实现更加逼真的增强现实体验。
3. 人机交互结构光系统标定可以用于人机交互界面的设计。
通过识别手势或姿态,可以实现自然而直观的人机交互方式。
4. 工业检测结构光系统标定可以用于工业检测中。
通过获取物体的三维形状信息,可以实现缺陷检测、尺寸测量等应用。
总结:结构光系统标定是一种重要的技术,它可以用于三维重建、增强现实、人机交互和工业检测等领域。
通过相机标定和投射器标定,可以获取物体的三维形状信息。
条纹投影轮廓术系统模型与标定综述
条纹投影轮廓术系统模型与标定是一个涉及到光学成像和三维重建的技术,它通常用于测量物体的形状和表面轮廓。
该系统模型包括光源、相机、投影仪等组件,通过投影条纹模式到目标物体表面,利用相机捕获的图像进行处理和分析,进而得到目标物体的三维形状信息。
这种技术常用于工业领域的质量控制、产品设计、数字化建模等方面。
在条纹投影轮廓术系统中,标定是一个重要的步骤,它用于确定相机、投影仪和物体之间的空间关系,以确保测量的准确性和可靠性。
标定过程通常包括相机内参和外参的标定、投影仪的标定以及物体表面的坐标系建立等步骤。
相机内参和外参的标定涉及到确定相机的焦距、主点位置、畸变参数等,而投影仪的标定则涉及到确定投影仪的投影中心、畸变参数等。
标定的准确性直接影响到后续三维重建和测量的精度和可靠性。
除了标定,条纹投影轮廓术系统模型还涉及到光源选择、条纹模式设计、图像处理算法等方面。
光源的选择和条纹模式的设计直接影响到投影的质量和清晰度,而图像处理算法则对于从捕获的图像中提取出物体表面的轮廓和形状信息至关重要。
常见的图像处理
算法包括相位解析法、结构光三角测量法等,它们能够有效地从图像中提取出条纹的相位信息,进而实现三维形状的重建。
总的来说,条纹投影轮廓术系统模型与标定涉及到光学成像、相机标定、投影仪标定、图像处理算法等多个方面,它们共同构成了一个完整的系统,用于实现物体表面的三维重建和测量。
在实际应用中,需要综合考虑光源、相机、投影仪的选择和参数设置,以及标定过程的精度和可靠性,从而确保系统能够准确地获取目标物体的形状和轮廓信息。
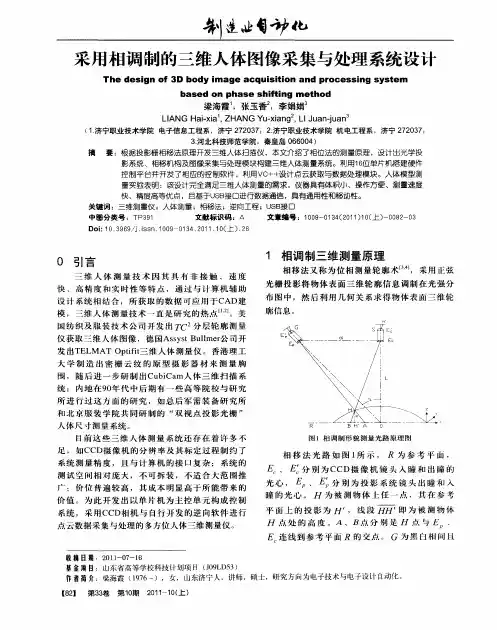
基于多频外差原理的三维测量技术黄燕钧1,2,李中伟2,史玉升2,王从军2(1.梧州学院计算机与电子信息工程系,广西梧州543002;2.华中科技大学材料成形与模具技术国家重点试验室,湖北武汉430074)摘 要:提出了一种基于外差原理的三维测量技术,该技术由相位移法、外差原理和双目立体视觉3部分组成。
相位移法和外差原理相结合能够自动完成相位展开,同时保持相移法原有的相位求解精度;然后根据相位展开后的相位图,使用双目立体视觉原理自动完成左、右对应点的立体匹配和被测物体的点云重构。
利用基于多频外差原理的三维测量技术建立了一套三维测量系统,该系统由2个CCD摄像机和1个DLP投影仪组成。
利用上述系统对人脸模型进行测量试验,测量结果表明该系统能够完成复杂自由曲面的测量,测量数据完整可靠。
关键词:光学测量;相位测量;外差原理;相位展开中图分类号:T G806 文献标志码:A相位测量技术是一种重要的三维测量方法,具有较高的测量精度,近年来,国内外众多学者在这一领域进行了大量的研究。
利用相位法原理进行三维物体轮廓测量,关键是要得到光栅的相位信息,然后从相位中提取出所包含的高度信息。
目前获得相位的方法有很多种,其中最常用的方法有相移(Phase-Shifting)法和FT P(Fourier T ransfo rm Pro filom etry)法。
虽然这2种方法所采取的求解过程不同,但是最终都是利用反正切函数求解相位值,因此直接得到的相位都包含在区间[-PI,P I]内,这样得到的数据并非相位的真实值,需要将包裹的相位解开,得到真实的相位值。
目前常用的相位展开方法为格雷(Gr ay)码法,其优点是条纹定级非常方便,直接根据黑白分布求得格雷码,再解码便获成功,算法实现简单,易于实现产品化。
但是格雷码法存在以下缺点:1)格雷码只是用于对测量幅面的分级,对计算物体的相位没有帮助,无法提高测量精度;2)对测量工件的表面明暗比较敏感,黑白交界处容易受到噪声的干扰,一般要喷显影剂才能测量,无法测量较暗的工件,无法测量表面剧烈变化的工件。
三坐标位置度测量方法三坐标位置度测量方法是用来描述和评估工件的形状、尺寸和位置误差的方法。
它可以用来判断工件的偏差是否符合工程要求,以确定工件是否合格。
下面将介绍几种常用的三坐标位置度测量方法。
1. 基本量测方法:基本量测方法是指使用基本量测仪器直接对工件进行量测的方法,例如使用游标卡尺、测微计等。
这种方法适用于工件形状简单、尺寸精度要求不高的情况,测量结果直观、易于理解。
2. 视觉测量方法:视觉测量方法是指利用相机、光学测量仪等设备对工件进行测量的方法。
通过采集工件的图像数据,使用计算机图像处理技术进行分析和测量。
这种方法通常适用于二维尺寸和形状测量,可以快速、自动地测量大量的工件。
3. 接触测量方法:接触测量方法是最常用的三坐标位置度测量方法之一。
它利用探头接触工件表面,通过测量位移传感器记录位移信号,并根据位移信号计算工件的尺寸和形状。
这种方法适用于各种类型的工件,可以测量三维尺寸和形状误差。
4. 光学测量方法:光学测量方法是利用光学原理进行测量的方法。
它可以分为直接光学测量和光学投影两种方法。
直接光学测量使用光学测量仪器直接对工件进行测量,例如使用激光扫描仪、激光测距仪等。
光学投影方法使用光学投影仪将工件的轮廓投影到测量屏幕上,通过目测或使用测量仪器进行测量。
光学测量方法适用于工件形状复杂、尺寸精度要求高的情况。
5. 激光测量方法:激光测量方法使用激光束对工件进行测量。
常见的激光测量方法包括激光干涉法、激光三角法等。
激光测量方法具有高精度、非接触、快速测量等优点,适用于许多尺寸和形状的工件。
综上所述,三坐标位置度测量方法多种多样,选择合适的测量方法需要根据工件的尺寸、形状、精度要求和测量效率等因素综合考虑。
不同的测量方法各有特点,可以根据实际需求选择合适的方法进行测量。
同时,在进行测量时需要注意仪器的使用和校准,以确保测量结果的准确性。
3d测量相位误差
1.系统误差:这种误差通常是由于测量系统本身的设计、制造或校准不精确而引
起的。
例如,激光测距系统的光路长度校准不准确,或者相机系统的内部标定参数不精确等。
此外,使用的设备类型,如工业级和商用级设备,也会影响误差的大小。
工业级设备通常具有较小的误差,但可能分辨率不如商用级设备高。
2.环境因素:温度变化、光照条件、大气折射等环境因素也可能导致相位测量的
误差。
这些因素可能会改变光学或电子传感器的性能,进而影响到相位测量的准确性。
3.噪声干扰:电子传感器或光学传感器在信号采集和处理过程中可能会受到噪声
干扰,导致相位测量结果的波动或偏差。
这种噪声干扰可能来自电路噪声、光学干扰、机械振动等。
4.投影误差:在3D测量中,光栅投影条纹是常用的技术,但是投影的条纹会有
误差。
例如,投影的亮度可能受到物体反射系数和投影仪的伽马畸变的影响。
即使相机的误差测量假设相移上没有误差,但投影点的亮度变化仍可能导致误差。
光场相机标定方法
光场相机标定方法主要包括以下步骤:
1. 准备标定板:选择一个具有高精度三维重建能力的标定板,并确保其表面光滑、平整,以便能够准确测量标定板上的角点。
2. 拍摄标定板照片:使用光场相机拍摄多张不同角度、不同焦距的标定板照片,以便能够覆盖相机的各种拍摄参数和姿态。
3. 检测角点:使用光场相机捕获的图像,检测出标定板上的角点,并使用光场相机捕获的深度信息确定每个角点的空间位置。
4. 建立坐标系:定义世界坐标系、相机坐标系、图像坐标系和像素坐标系,以便在不同的坐标系中进行转换。
5. 相机标定:根据标定板上的角点坐标和对应的光场相机参数,通过优化算法求解相机的内参矩阵和外参矩阵,以及畸变系数。
6. 验证标定结果:使用标定结果对相机进行重新标定,并比较标定前后的成像效果,以验证标定结果的准确性。
光场相机标定方法需要高精度的标定板、多角度多姿态的拍摄以及准确的角点检测算法,同时也需要合适的优化算法求解相机的内外参数和畸变系数。
最终,通过验证标定结果,可以确保标定的准确性和可靠性,从而提高光场相机的成像质量。
第42卷摇第10期2021年10月摇摇摇摇摇摇摇摇摇摇激光杂志LASERJOURNAL摇摇摇摇摇摇摇摇摇摇摇Vol郾42,No郾10October,2021
http颐//www.laserjournal.cn收稿日期:2021-02-17基金项目:国家自然科学基金(No.61671008);桂林电子科技大学研究生教育创新计划项目(No.2020YCXS097)作者简介:葛旭文(1994-),男,硕士研究生,主要研究方向为图像处理与测试计量技术。E-mail:gexuwen@foxmail.com通讯作者:马峻(1977-),男,教授,博士生导师,,主要研究方向为测控技术与仪器、光电测试技术和信号处理。E-mail:majun@guet.edu.cn
摇摇相位测量轮廓术中投影光栅的快速自校正
葛旭文1,马摇峻1,2,陈寿宏1,2,郭摇玲1,2,徐翠锋1,21桂林电子科技大学电子工程与自动化学院,广西桂林摇541000;
2桂林电子科技大学广西自动检测技术与仪器重点实验室,广西桂林摇541000
摘摇要:针对数字光栅投影的相位测量轮廓术系统,提出了一种投影光栅快速自校正的新方法。在实际测量条件下,严格约束测量系统间的几何位置是不现实的。因此,参考平面上的光栅条纹常表现为梯形畸变和周期展宽畸变,传统的标定过程难以完全消除。针对这些问题,设计了一种基于空间变换的投影光栅快速自校正方法。校正过程发生在投影仪光栅输出之前,与现有的补偿校正算法相比无需计算单像素点相位误差且不局限于特定相位计算方法,简单快捷,可在数秒内完成校正。在光栅投影三维轮廓测量实验中证明了该方法的有效性。关键词:三维传感;相位测量;光栅自校正;空间变换中图分类号:TN29摇摇文献标识码:A摇摇doi:10郾14016/j.cnki.jgzz郾2021郾10郾053
Rapidself-correctionofprojectiongratinginphasemeasurementprofilometry
基于四步相移光栅投影的三维形貌测量系统尚忠义;李伟仙;董明利;段良君【摘要】为了实现对具有明显跳变面物体的轮廓测量,建立了四步相移光栅投影的三维形貌测量系统,并对所采用的四步相移测量算法进行研究.在介绍四步相移原理的基础上以有明显跳变面的三棱锥橡皮块为例,建立针对明显跳变面的测量算法.通过对4幅相移图算术求和并除以4得到平均灰度图;将平均灰度图二值化处理定位明显跳变面或阴影部分;将二值化图像与包裹相位图卷积,而后对包裹相位图进行解包裹,从而得到正确的连续相位,最终获取物体三维形貌.根据上述算法测量三棱锥的三维形貌并计算其体积,测量实验表明:被测物的体积平均相对精度为0.47%.【期刊名称】《应用光学》【年(卷),期】2015(036)004【总页数】6页(P584-589)【关键词】四步相移;明显跳变面;光栅投影;三维形貌测量;解包裹【作者】尚忠义;李伟仙;董明利;段良君【作者单位】北京信息科技大学光电测试技术北京市重点实验室,北京100192;北京信息科技大学光电测试技术北京市重点实验室,北京100192;北京信息科技大学光电测试技术北京市重点实验室,北京100192;北京信息科技大学光电测试技术北京市重点实验室,北京100192【正文语种】中文【中图分类】TN26;P234.1引言基于光栅投影测量方法[1-6]是近年来发展起来的具有代表性的一种三维视觉技术。
这种测量方法具有非接触、成本低和精度高等优点,广泛应用于光学三维测量领域。
在数字光栅投影测量方法中最为常用的算法是相移算法[2-6]。
近年来,在条纹投影的三维形貌测量研究中,有跳变面物体的形貌测量,一直是该技术的研究热点之一[1-3]。
有采用多频条纹投影结合傅里叶变换或时间相移技术,研究跳变面对相位解调影响的问题[11-14]。
然而在单色投影的情况下,需要采集多幅、多频条纹图,之后再解包裹,得到连续相位。
另外,傅里叶变换中的频谱混叠是影响相位求解的最重要的因素,傅里叶变换法不适合处理几何形状复杂的物体,尤其有跳变面的物体,当物体边界有较大突变区域时,傅里叶变换法求的相位误差比较大,进而对物体三维形貌的重建及测量有影响。
相位辅助光学三维测量系统的标定方法相位辅助光学三维测量系统的标定方法Calibration Technique for Phase-AidedOptical 3D Measurement Systems一级学科仪器科学与技术学科专业仪器科学与技术作者姓名殷永凯指导教师彭翔教授天津大学精密仪器与光电子工程学院二零一二年五月独创性声明本人声明所呈交的学位论文是本人在导师指导下进行的研究工作和取得的研究成果,除了文中特别加以标注和致谢之处外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得天津大学或其他教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
学位论文作者签名: 签字日期: 年月日学位论文版权使用授权书本学位论文作者完全了解天津大学有关保留、使用学位论文的规定。
特授权天津大学可以将学位论文的全部或部分内容编入有关数据库进行检索,并采用影印、缩印或扫描等复制手段保存、汇编以供查阅和借阅。
同意学校向国家有关部门或机构送交论文的复印件和磁盘。
(保密的学位论文在解密后适用本授权说明)学位论文作者签名: 导师签名:签字日期:年月日签字日期:年月日中文摘要相位辅助光学三维测量技术具有测量精度高、数据密度大、测量速度快、系统结构简单、普适性和灵活性好等优点,是基于结构照明的光学三维测量中极具代表性的一类方法,在工业制造、测绘导航、文化遗产、医学诊疗、影视娱乐等各个领域有着日趋广泛的应用。
本论文主要针对相位辅助光学三维测量系统的标定方法及其相关技术展开研究,旨在提高测量系统的标定精度,寻找可行性更高的现场标定方法。
在概括介绍相位辅助光学三维测量的基本原理、国内外研究现状、发展趋势以及关键技术的基础上,论文重点对决定系统标定精度的两个要素??基准点的图像坐标和基准点的三维坐标进行了分析研究。
圆形标志点是标定所用基准点的常见形态,为了准确地获得圆形标志点图像的中心坐标,基于余误差函数的椭圆旋转变换对圆形标志点图像邻域的灰度分布进行曲面建模,实现了基于曲面拟合的亚像素精度的中心定位。
模拟和实际的实验均证明,该方法对图像中的噪声表现出了较好的鲁棒性。
讨论了由于透视投影的非对称性导致的中心定位偏差,结合 Chen 的基于圆的相机标定技术以及Heikkil?的偏差模型来对上述中心定位偏差进行了修正。
单目的“相机-投影仪”结构是基于相位辅助光学三维测量技术的三维传感器的常见配置。
针对单目三维传感器标定所常用的平面标靶,设计了一种基于位置关系不变性实现基准点自动编码的平面标靶图案,用于方便地对传感器进行标定。
考虑到投影仪和相机在模型上的等价性,将光束平差原理引入单目三维传感器的标定中,从根本上减小了由于基准点三维坐标的不确定度所引入的系统误差。
实验证明该方法可以利用制作精度较低的标靶实现较高精度的标定。
在测量拓扑复杂、尺度较大的物体时,一个可行性较高的方案是利用多个双目传感器构成多节点三维测量网来进行测量。
通过对已有文献的分析可知,三维标靶是昀适用于测量网标定的标靶。
为此,首先以编码标志点为基准点来构造自适应测量空间的三维标靶,然后运用欧氏重建和光束平差技术精确重建基准点的三维坐标,昀后利用重构后的标靶方便地进行多节点三维测量网的标定。
对上述过程中的标靶重建精度和系统标定精度进行了小尺度下的实验验证。
将上述测量网的标定方法应用于一个工程案例,对某石英陶瓷坩埚自动检测系统中的三节点测量网进行了实际标定。
关键词:光学三维测量,标定,中心定位,光束平差,测量网,相位辅助ABSTRACTPhase-aided optical three-dimensional 3D measurement PAOM-3D has the advantages of high accuracy, high density, rapid measurement, simple structure, gooduniversality and flexibility. The PAOM-3D is the most representative method amongoptical 3D measurement techniques using structural illumination, andit hasincreasingly extensive applications in various fields including industrialmanufacturing, surveying & navigation, cultural heritage, medicine clinics,entertainment, and so onThe calibration methodology and related techniques of the PAOM-3D system arestudied in this dissertation, which aims to improve the accuracy of system calibrationand find more feasible in situ calibration approach. After briefly introducing theworking principle, research status, development trend and key techniques of thePAOM-3D, this dissertation pays more attention to the image coordinate and the 3Dcoordinate of the benchmark, which are two essentials determining the accuracy ofsystem calibrationCircular landmark is the commonly used benchmark in the calibration. In orderto obtain the image coordinate of the circular landmark center, the gray leveldistribution around the circular landmark image is modeled with thesurface createdby elliptic rotation of the complementary error function, and then the center can belocated with sub-pixel accuracy using surface fitting algorithm. Experiment results forboth simulated and practical images demonstrate that the proposed method showsgood robustness against the image noise. The eccentricity error of center locationalgorithm caused by the asymmetric perspective projection is discussed, and thiseccentricity error is corrected with the combi nation of Chen’s camera calibrationbased on circles and Heikkil?’s formulation for the eccentricity errorMonocular “Camera-Projector” structure is the common setup for 3D sensorbased on the PAOM-3D technique. Since planar target is commonly used in thecalibration of the monocular 3D sensor, a planar calibration target pattern, which canachieve auto-coding for benchmarks by using positional relationship invariance, isdesigned for conveniently calibrating the 3D sensor. Taking into account theequivalence on the modeling for projector and camera, the principle of bundleadjustment is introduced into the process of calibrating the monocular 3D sensor,which can effectively reduce the system calibration error arising from the inaccurate3D coordinates of the benchmarks. Experiment results show that the proposed methodcan reach relatively high calibration accuracy while utilizing calibration target withlow manufacture precisionWhen measuring objects of large scale and complex topology, a more feasiblescheme is to build up a multi-node optical 3D measurement network consisting ofmultiple binocular 3D sensors. An analysis of previous literature shows that the 3Dcalibration target is the most suitable one for measurement network calibrationTherefore, the coded landmarks which are taken as benchmarks are used to build the3D calibration target that is self-adaptive to the measurement volume,then theEuclidean reconstruction and bundle adjustment are employed to reconstruct the 3Dcoordinates of benchmarks accurately. Finally the multi-node 3D measurementnetwork can be calibrated conveniently with the reconstructed target. The accuracy oftarget reconstruction and system calibration are well evaluated in the experiments on areduced scale. The proposed approach of measurement network calibration is appliedto an engineering case study, in which a three-node measurement network to inspectthe silica ceramic crucible automatically was successfully calibratedKey words: optical three-dimensional 3D measurement, calibration, center location,bundle adjustment, measurement network, phase-aided目录第一章绪论 1?1.1 光学三维测量简介1?1.1.1 典型技术. 1?1.1.2 应用领域. 8?1.2 相位辅助光学三维测量. 11?1.2.1 结构光编码与相位编码11?1.2.2 工作原理13?1.2.3 系统标定14?1.2.4 国内外研究现状与发展趋势 16?1.3 本论文的研究背景及主要创新点 18?1.3.1 课题来源18?1.3.2 主要研究内容和创新点18?第二章相位辅助光学三维测量系统的基本原理. 21?2.1 双目三维传感器. 21?2.1.1 相机模型21?2.1.2 双目传感器模型24?2.1.3 双目传感器标定25?2.1.4 影响标定精度的因素分析. 26?2.2 单视点深度像27?2.2.1 相位重建27?2.2.2 对应点搜索. 30?2.3 深度数据的后处理 31?2.3.1 深度像匹配. 31?2.3.2 深度像融合. 33?2.3.3 几何模型简化 34?2.4 本章小结. 35?第三章圆形标志点的中心定位36?3.1 标志点的自动识别 36?3.1.1 边缘检测36?3.1.2 目标识别37?3.2 基于曲面拟合的亚像素中心定位 38 3.2.1 算法原理39?3.2.2 参数估计41?3.2.3 实验结果42?3.3 中心定位投影偏差的分析和修正 47?3.3.1 中心定位偏差分析. 48?3.3.2 中心定位偏差修正. 50?3.4 本章小结. 56?第四章单目三维传感器的标定58?4.1 单目传感器标定的基本论述58?4.1.1 单目传感器系统模型 58?4.1.2 单目传感器标定的基本原理 60?4.2 标靶图案设计61?4.3 基于光束平差的单目传感器标定 64?4.3.1 基本原理64?4.3.2 算法分析65?4.3.3 实验结果67?4.4 本章小结. 71?第五章多节点三维测量网的标定. 73?5.1 多节点三维测量网标定的一般论述73?5.1.1 多节点三维测量网模型73?5.1.2 多节点三维测量网标定的基本原理 74?5.1.3 测量网标定的研究现状75?5.2 编码标志点的设计与解码 75?5.2.1 编码标志点的设计. 76?5.2.2 编码标志点的解码. 78?5.3 基于自适应标靶的三维测量网标定79?5.3.1 自适应标靶的构造. 79?5.3.2 三维测量网的标定. 84?5.4 测量网标定的实验验证. 84?5.4.1 标靶重构实验 84?5.4.2 测量网标定实验87?5.5 本章小结. 88?第六章三维测量网应用案例研究??石英陶瓷坩埚自动检测. 90?6.1 自动检测的需求. 906.2 检测系统方案设计 91?6.3 三维数据采集93?6.3.1 系统标定93?6.3.2 深度像采集. 96?6.4 三维数据后处理. 96?6.4.1 深度像匹配. 97?6.4.2 几何特征检测 98?6.4.3 生成报表 100?6.5 本章小结101?第七章总结与展望103?7.1 全文总结103?7.2 工作展望104?参考文献106?附录 128?A. 椭圆方程及其性质 128?B. 昀小二乘问题129?B.1 线性昀小二乘问题130?B.2 非线性昀小二乘问题. 130?C. 由本质矩阵求解相机外参 133?发表论文和参加科研情况说明136?致谢 138第一章绪论第一章绪论1随着先进制造技术的发展和产品需求的多样化,对复杂结构和自由曲面的测量需求不断增长,传统的针对经典几何量如长度、角度、直线度、平面度等的测量手段,在应对复杂的测量任务时,其局限性日益凸显。