新型模块化可重构机器人系统
- 格式:pdf
- 大小:676.43 KB
- 文档页数:4
西安高学考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
中南大学网络教育课程考试复习题及参考答案机器人学导论一、名词解释题:1.自由度:2.机器人工作载荷:3.柔性手:4.制动器失效抱闸:5.机器人运动学:6.机器人动力学:7.虚功原理:8.PWM驱动:9.电机无自转:10.直流伺服电机的调节特性:11.直流伺服电机的调速精度:12.PID控制:13.压电元件:14.图像锐化:15.隶属函数:16.BP网络:17.脱机编程:18.AUV:二、简答题:1.机器人学主要包含哪些研究内容?2.机器人常用的机身和臂部的配置型式有哪些?3.拉格朗日运动方程式的一般表示形式与各变量含义?4.机器人控制系统的基本单元有哪些?5.直流电机的额定值有哪些?6.常见的机器人外部传感器有哪些?7.简述脉冲回波式超声波传感器的工作原理。
8.机器人视觉的硬件系统由哪些部分组成?9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些?10.请简述模糊控制器的组成及各组成部分的用途。
11.从描述操作命令的角度看,机器人编程语言可分为哪几类?12.仿人机器人的关键技术有哪些?三、论述题:1.试论述机器人技术的发展趋势。
2.试论述精度、重复精度与分辨率之间的关系。
3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。
4.试论述机器人静力学、动力学、运动学的关系。
5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的?6.试论述工业机器人的应用准则。
四、计算题:(需写出计算步骤,无计算步骤不能得分):1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。
求u, v, w, t各点的齐次坐标。
xyzOuvwt2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。
模块化空间机器人的协调控制摘要:模块化的自组装在轨机器人有可能降低任务费用、提高可靠性和允许在轨维修和加油。
具有各种的专门能力的模块从轨道库存自组装。
组装的各模块将共享一些资源,例如电源和传感器。
由于各自由飞行的模块都携带了自己的姿态控制执行器,所以组装的系统有大量的传感器和执行器的冗余。
传感器的冗余使减少测量误差的传感器融合技术成为可能。
执行器冗余使系统在燃料使用的管理上具有很大灵活性。
在本文中,自组装空间机器人的控制在仿真和实验中进行。
提出了利用传感器和执行器冗余的控制和传感器算法。
该算法解决来自模块之间的动力学耦合、燃料资源的各模块分配和羽流撞击的控制挑战。
关键字:空间机器人协调控制模块1.引言自组装模块化在轨机器人和航天器可以减少费用,提高可靠性和允许在轨系统的快速维修和加油。
这样空间机器人由自给自足的模块组成,每个模块都有一个特殊的功能。
组装的各模块将共享一些资源,例如电源,传感器,计算能力和数据。
一个系统由大量生产的模块组成将比定制设计的花费更少。
因为每个模块的体积小且成本低,所以可以使用廉价的运载器发射模块。
模块的库存可以停留在轨道上,这样可以提高发射计划的灵活性并允许对诸如海啸、地震等灾难响应任务进行快速响应。
在轨模块可以代替失效的模块从而延长系统生命周期。
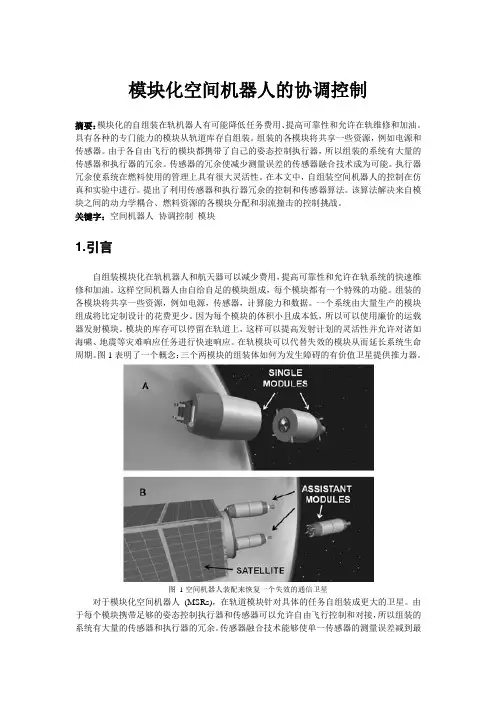
图1表明了一个概念:三个两模块的组装体如何为发生障碍的有价值卫星提供推力器。
图1空间机器人装配来恢复一个失效的通信卫星对于模块化空间机器人(MSRs),在轨道模块针对具体的任务自组装成更大的卫星。
由于每个模块携带足够的姿态控制执行器和传感器可以允许自由飞行控制和对接,所以组装的系统有大量的传感器和执行器的冗余。
传感器融合技术能够使单一传感器的测量误差减到最小。
执行器冗余使系统在燃料使用的管理上具有很大灵活性。
此外,它可以引进额外的控制约束条件。
例如,在组装中,一些推进器可能处在不正确的位置以至于它们的推进器羽流碰撞其他的部分,导致散失一部分推力或者改变了推力方向并且很可能损坏模块。
认识工业机器人机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多种学科而形成的高新技术,是当代研究十分活跃、应用日益广泛的领域。
而且,机器人应用情况是反映一个国家工业自动化水平的重要标志。
本次任务的主要内容就是了解工业机器人的现状和发展趋势;通过现场参观,认识工业机器人相关企业;现场观摩或在技术人员的指导下操作ABB工业机器人,了解其基本组成。
一、工业机器人的定义及特点1.工业机器人的定义国际上对机器人的定义有很多。
美国机器人协会(RIA)将工业机器人定义为:“工业机器人是用来进行搬运材料、零部件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置。
”日本工业机器人协会(JIRA)将工业机器人定义为:“工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。
”在我国1989年的国际草案中,工业机器人被定义为:“一种自动定位控制,可重复编程、多功能的、多自由度的操作机。
操作机被定义为:具有和人手臂相似的动作功能,可在空间抓取物体或进行其他操作的机械装置。
”国际标准化组织(ISO)曾于1984年将工业机器人定义为:“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助于可编程的操作来处理各种材料、零件、工具和专用装置,以执行各种任务。
”2.工业机器人的特点(1)可编程生产自动化的进一步发展是柔性自动化。
工业机器人可随其工作环境变化的需要而再编程,因此它在小批量、多品种具有均衡高效率的柔性制造过程中能发挥很好的功用,是柔性制造系统中的一个重要组成部分。
(2)拟人化工业机器人在机械结构上有类似人的行走、腰转、大臂、小臂、手腕、手爪等部分,在控制上有计算机。
此外,智能化工业机器人还有许多类似人类的“生物传感器”,如皮肤型接触传感器、力传感器、负载传感器、视觉传感器、声觉传感器、语音功能传感器等。
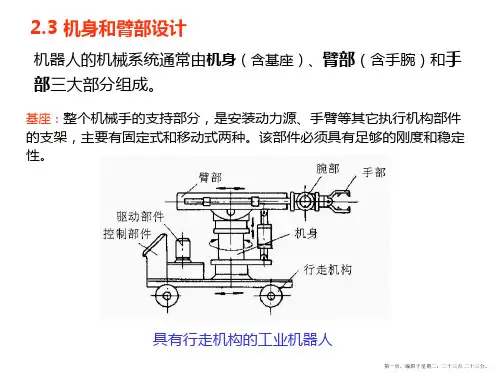
可重构机器人手指关节的设计与优化近年来,随着机器人技术的不断进步和应用领域的拓展,人们对可重构机器人的需求与日俱增。
可重构机器人具有模块化结构,能够根据任务需求进行灵活组合和调整。
在可重构机器人的构成部件中,手指关节起着至关重要的作用,其设计与优化具有重要的理论和实践意义。
首先,手指关节的设计需要兼顾机械结构和运动控制。
在机械结构方面,传统的手指关节采用单一的驱动方式,如电机驱动或气动驱动。
然而,这种设计存在一些局限性,如电机驱动的手指关节在运动过程中容易出现抖动现象,气动驱动的手指关节受到压力控制的限制。
为了解决这些问题,一种可行的设计方案是采用多关节驱动的机械结构,通过合理配置关节和实现关节之间的协调运动,提高手指关节的稳定性和精确性。
其次,手指关节的优化需要考虑运动学模型和力学性能。
运动学模型是描述手指关节运动规律的数学模型,通过研究手指关节的转动轴、位移和速度等参数,可以实现对手指关节运动的精确控制。
力学性能涉及手指关节的承载能力和抗冲击性能等方面,既要保证手指关节能够承受较大的载荷,又要保证在受到冲击时不易损坏。
为了实现手指关节的优化设计,可以借助仿生学的原理和方法,模拟人体手指的结构和运动特点,从而提高机器人手指关节的性能。
此外,手指关节的设计和优化还需要考虑与人工智能的集成。
当前,人工智能技术在机器人领域得到了广泛应用,能够实现机器人的自主感知、决策和行动能力。
将人工智能技术与机器人手指关节的设计和优化相结合,可以实现更高水平的智能化操作。
例如,通过深度学习算法训练机器人手指关节的运动模式,使其能够自动适应不同的任务需求,并根据实时反馈信息进行调整和改进。
这种智能化设计可以大大提高机器人的生产效率和操作精度。
最后,可重构机器人手指关节的设计与优化还需要考虑工程实施的可行性和经济性。
在实际应用中,手指关节的设计和优化必须考虑到制造成本、维修成本和可持续性等因素。
因此,合理选择材料、采用成熟的制造工艺和优化的控制策略,对于提高手指关节的可靠性和经济性至关重要。
2018年12月,由美国国防高级研究计划局(DARPA)“凤凰”(Phoenix)项目支持诺瓦沃克斯公司(NovaWurks)研制的“细胞卫星集成技术试验”(eXCITe)卫星搭乘猎鹰-9(Falcon-9)火箭发射进入太阳同步轨道,以在轨验证“细胞卫星”(Satlets)模块化可重构平台兼容有效载荷的能力。
此次试验将推动模块化可重构航天器加速迈向工程应用。
模块化可重构航天器可快速装配、在轨重组构型和功能,将成为未来航天器发展的新方向,并用于快速响应作战需求。
贾平(中国航天系统科学与工程研究院)1 模块化可重构航天器基本情况模块化可重构航天器是平台由多个外形尺寸相同、可被替换的模块按任务需求组装而成的航天器,可在轨重新组装平台,改变构型和能力,以支持不同功能和性能的有效载荷。
每个模块集通信、控制、驱动和传动功能于一体,具有一种或多种平台子系统功能,可批量重复生产。
“可重构”是指个别模块可拆卸更换,整个平台也能完全拆解重组,且更换或重组后硬件和软件能正常连接/联接。
模块化可重构航天器具有传统模块化航天器不具有的优点:模块构型相同、通用性和互换性强,因而废旧航天器模块可被重新利用;可扩展性强,可通过增加模块增强性能;灵模块化可重构航天器将成为航天器发展新方向活性好,可随时拆解和组装,实现按需求调整构型和功能,升级和维修更便捷。
模块化可重构航天器有以下几种装配和部署方式。
一是在地面装配后再寄宿在其他大型航天器上入轨并弹射部署;二是模块被发射至“国际空间站”,由航天员装配成航天器再释放部署;三是模块被发射入轨后由太空机器人装配并部署。
随着自主技术等的发展,未来还可能实现不依赖外力,由各模块自主机动对接装配而成。
模块化可重构航天器的关键技术包括模块间的标准化接口设计;用于构型和功能变换的智能控制技术;多模块间通信、协同运动规划和控制等。
2 模块化可重构航天器发展情况从21世纪初开始,美国、德国等开展了多项模块化可重构航天器研究,例如DARPA曾于2006年启动“具有快速、灵活、可分开和编队飞行能力的未来航天器计划”(简称F6,2013年已取消)。
我国工业机器人的发展现状与趋势中国作为亚洲第三大的工业机器人需求国,市场发展稳定,汽车及其零部件制造仍然是工业机器人的主要应用领域,随着我国产业结构调整升级不断深入和国际制造业中心向中国的转移,我国的机器人市场会进一步加大,市场扩展的速度也会进一步提高。
对于国外的先发、领先优势,我国的机器人产业的研发远远落后于美、日两国,甚至比起韩国也落后一步,尤其是在青少年中远未开展机器人的组装、制作的科学活动,这将关系到二、三十年后我国的产业发展。
近年来,我们在研究文化创造性产业时,发现国外正在兴起一个与文化产业、科学技术有紧密关系的未来产业——机器人的研究、开发及制造,参与者除了传统从事学术研究的科技工作者、大学研究梯队、企业产品的专门研究人员之外,更有一大批的青少年积极加入此一新兴的科学技术新潮流之中。
以下是我们对国外此一产业的发展状况的考察及思考。
现状我国从上世纪80年代开始在高校和科研单位全面开展工业机器人的研究,近20年来取得不少的科研成果。
但是由于没有和企业有机地进行联合,至今仍未形成具有影响力的产品和有规模的产业。
目前国内除了一家以组装为主的中日合资的机器人公司外,具有自主知识产权的工业机器人尚停留在高校或科研单位组织的零星生产,未能形成气候。
近10年来,进口机器人的价格大幅度降低,对我国工业机器人的发展造成了一定的影响,特别是我国自行制造的普通工业机器人在价格上根本无法与之竞争。
特别是我国在研制机器人的初期,没有同步发展相应的零部件产业,使得国内企业在生产的机器人过程中,只能依赖配套进口的零部件,更削弱了我国企业的价格竞争力。
工业机器人发展长期以来受限于成本较高与国内劳动力价格低廉的状况,随着中国经济持续快速的发展,近几年的国民生产总值年平均增长率更是保持在9%左右,人民生活水平不断地提高,劳动力供应格局已经逐步从“买方”市场转为“卖方”市场、由供远大于求转向供求平衡。
作为制造业主力的农民工也从早期的仅解决温饱问题到现在对薪资和工作条件提出了更高的要求。
SCARA机器人结构与实验装置设计摘要工业机器人是最典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
本文设计了一个教学用SCARA机器人。
SCARA机器人(全称Selectively Compliance Articulated Robot Arm)很类似人的手臂的运动,它包含肩关节肘关节和腕关节来实现水平和垂直运动。
它是一种工业机器人,具有四个自由度。
其中,三个旋转自由度,另外一个是移动自由度。
它能实现平面运动,具有柔顺性,全臂在垂直方向的刚度大,在水平方向的柔性大,广泛用于装配作业中。
本文用模块化发计方法设计了SCARA机器人的机械结构。
本文结合Pro/e三维建模分别对基座、大臂、小臂、以及腕部关节做了详细的设计,并根据实际工作情况对各关节进行受力分析,并模拟了机器人的工作状态,严格保证了该设计在工作中的安全性和可靠性,具有很好使用价值和发展前景。
最后,本文还分析了SCARA机器人的运动学正解和逆解,建立了机器人末端位姿误差计算模型并做了运动模拟,更加证实了本设计在实际应用中的实用性和可靠性。
关键字: S CARA,四个自由度,受力分析DESIGN OF SCARA ROBOT STRUCTURE ANDEXPERIMENTAL DEVICEABSTRACTIndustrial robot is the most typical mechatronic digital equipment, added value and high, wide range of applications, support for advanced manufacturing technology and information society, new industries, and social development of future production will increasingly play a The more important role.SCARA(Selectively Compliance Articulated Robot Arm)robots work in a similar Way as human’s arms.The SCARA robot,incorporating a shoulder joint,an elbow joint,and a wrist joint,is capable of operating vertically and horizontally.The SCARA robot is a kind of 4 DOF industrial robots、3 rotary DOFs and 1 linear DOF.It,featuring compliance,good Vertical rigidity,and Horizontal flexibility,is widely used in assembly.Modular-design methodology was utilized to design the mechanism.This paper combination with Pro/E 3D modeling , designed the main arm, small arm and wrist joints.And according to the actual working ,analysis each joint’s force, and simulate the working state of the robot,in order to ensure the design work in safety and reliability, and has good use value and the prospects for development.In the second and third chapter, it introduces detailed detail among the processing of the structure designing of a SCARA robot and its kinematics analysis. Analysis of the SCARA robot inverse kinematics, and to establish the position and orientation of robot end of the model error.KEY WORDS:S CARA,four degrees of freedom,analysis目录前言 (3)第一章绪论 (2)§1.2 国内外机器人领域研究现状及发展趋势 (3)§1.3本论文的研究意义及内容 (4)§1.4本论文的研究内容 (9)第二章 SCARA机器人的机械结构设计 (10)§2.1 SCARA器人的总体设计 (10)§2.1.1机械传动方案的比较 (10)§2.1.2传动零部件的初选 (10)§2.1.3减速机的选择 (11)§2.1.4本机器人的技术参数 (11)§2.1.5机器人各个手臂长度和工作空间的确定 (12)§2.2机器人总体传动方案的选择级装配图 (13)§2.2.1机器人机身输出轴 (13)§2.2.2机器人大臂输出轴 (14)§2.2.3机器人腕部结构图 (15)第三章Pro/E运动仿真.................. 错误!未定义书签。
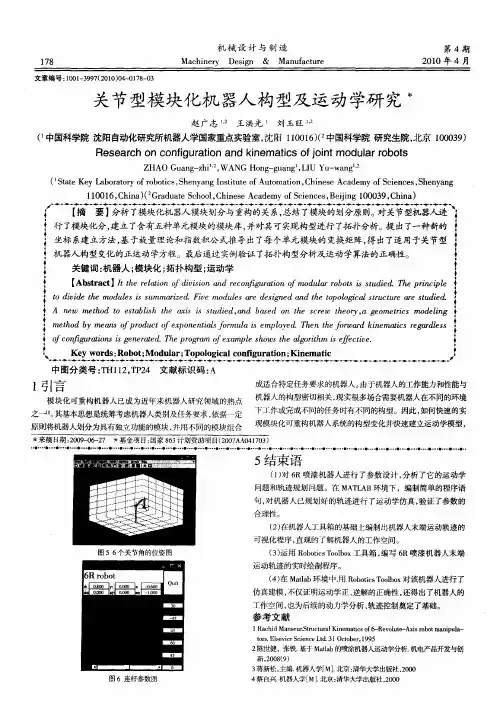
第卷增刊
年月机械工程学报
新型模块化可重构机器人系统’张玉华赵杰张亮齐
立
哲蔡鹤皋
哈尔滨工业大学机器人研究所哈尔滨
摘要研制了一种新型模块化可重构机器人系统机器人由许多结构和功能完全相同的模块相互联接组成通过改变各模块之间的联接状态和相互位置关系不需任何外界辅助自动完成重构过程和整体协调运动设计了模块的分离联接机构和单自由度立方体结构模块结构兼具阵列式和串联式特点可方便的实现重构运动和整体协调运动上位机软件系统可通过交互方式设置各机器人模块的方位可手工编写或自动产生可重构机器人各模块
的运动序列可对机器人可重构过程和整体构型的协调运动进行规划和仿真并通过计算机串口对机器人进行实时控制试验验证了机器人模块的分离联接和模块协作基本功能和蠕虫构型四足构型履带构型三种构型的整体协调运动功能试验表明模块结构设计简单合理控制容易可以完成重构操作功能和整体协调运动功能关键词模块化机器人可重构协调运动中图分类号
月叮舀
可重构机器人硬件结构
模块化可重构机器人由许多具有一定自治能力和感知能力的模块组成它利用模块之间的联接性和互换性以及模块传感器感知到的周围环境信息通过模块之间的联接断开操作和相互运动来自
动改变整体构形扩展运动形式完成多种运动及操作任务模块化可重构机器人适用在非结构化环境或未知环境中执行特殊任务如空间及海底探索军事侦察核电站检修灾难救援等目前国外主要是日本和美国的研究小组在模块结构设计可重构策略和运动规划方面进行了相关研究并研制成功
多种模型试验系统典型代表有的,设计的系统等提出的介系
统等,研制的仃谊机器人川从
等设计的系统国内主要是在可重构策
略和运动规划方面进行了理论研究件尚未出现模
型试验系统研制了一种新型模块化可重构机器人系统可重构机器人由结构和功能完全相同的机器人模块
组
成通过改变模块之间的联接状态和相互位置关系自动改变整体构形结构完成重构过程和整体协调
运动该系统结构简单制造方便试验表明可
重构机器人在结构和功能上达到了预期目标控制容易可重构及整体协调运动能力
强
机器人系统组成
系统组成如图所示由上位机中转单元电源和可重构机器人四部分组成上位机可以对机器人
模块的重构和整体运动进行离线规划对各模块执
行指令序列后的结果进行仿真产生控制机器人模
块运动的指令序列并可通过串行口对机器人模块的运动进行实时控制中转单元接收上位机传送来的指令序列重新进行处理后转发给可重构机器人
机器人模块接收中转单元转发来的指令并按指令进行相应的运动动作外部电源对所有机器人模块进行供电
上位机中转单元电源可重构机器人图系统组成
黑龙江省博士后科研启动基金资助项目加
收到初稿加收到修改稿
机器人
模块结构
可重构机器人模块结构设计是研究可重构机
器人的基础三维可重构机器人的可重构和整体运动特性对模块设计有如下要求①有一个或几个
转
动自由度②质量小三维可重构过程为有效的改
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net机械工程学报
第卷增刊
变构型一个模块必须具有带动一个或几个模
块进
行运动的能力模块的质量直接影响模块的可重构
能力③模块之间联接时可准确定位断开容易④在联接和断开过程中电源和通信线路必须保持连通且线缆不被缠绕⑤具有一定的机械强度提
出了一种新型三维模块结构采用正立方体形状
模块具体结构如图所示每个模块由两个形半
块结构构成具有一个转动自由度和四个结构相同
的联接面两个半块之间通过电动机输出轴联接成
一体能够实现最大范围为士的相互转动通过
多个模块的组合可以完成模块之间的位置改变和相互运动模块的正立方体结构使模块可快捷有效的
组成各种阵列网格式的整体构型使可重构规划变
得简单同时每个模块具有单转动自由度解决了特定构型协调运动时模块间的相对运动问题模
块中的电动机采用认叭公司的舵机研制成的模块参数如表所示
磁铁作为联接驱动零件弹簧作为分离驱动零
件当受热产生驱动力此时
十凡
式中凡—对活动底板的作用力
凡—非线性弹簧对活动底板的作用力
—两联接面上相互配对的磁铁之间的吸引力即模块之间的作用力
磁铁非线性弹簧
联接面分离单转动自由度
联接而连接
图机器人模块分离联接机构原理图
联接面
活动底板受和非线性弹簧驱动远离联接
面使得联接面上的配对磁铁之间距离变大降低
了磁铁之间的吸引力此时两模块联接面之间可以分离
设计过程中要求冷却后刚性变小也随之减小完全冷却后几乎为零所
以
图机器人模块结构
表机器人模块参数表参数数值外形尺寸灼刀叮质量功瓜仓
电源乙万
电动机额定转矩联接面结合力卢
机器人模块分离联接机构只有模块间进行有效的联接和分离操作可重
构机器人才能实现可重构过程现有的可重构机
器
人模块的联接机构大都采用了销孔式联接方式通
过机械方法固连以达到可靠联接的目的这种
凹
凸配对的联接方式由于需要两个不同模块配对才能
正常工作降低了模块的通用性虽然联接可靠
但在分离操作时需要额外的分离空间模块不能够
在间隙比较小甚至没有间隙的情况下分开限制了
模块运动的灵活性设计了一种
基于形状记忆合金
巧弹簧驱动的联接分离机构图是该联接分离机构的原理示意图采用永
活动底板向联接面靠近非线性弹簧被
压
缩
两联接面上的磁铁达到吸合状态此时凡相对于两模块之间的作用力来说是内力不影响模块之间的吸附力采用此种结构两模块之间吸附力大
断开时需要的驱动力很小可方便的联接与断开同时由于磁铁本身具有的对中性和模块的立方体结构解决了联接时联接面之间的定位问题且该联接分离机构为平面机构模块之间不需要额外的分离空间即可完成分离操作提高了模块运动
的灵活性
机器人模块电源及通信触点结构安排由于可重构机器人模块在可重构过程中需要改变模块之间的断开联接及位置关系为保证在可重构过程中线缆不被缠绕且模块在不同方位下仍能
可靠联接并通信采用了弹簧触点结构
并对称正交布置触点触点位置分布如图所示触点材料采用导电性和耐磨性优良的磷铜控制系统结构
采用集中式控制每个模块都有自己
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net年月张玉华等新型模块化可重构机器人系统
试验
图电衡戊巡情触息仪直分巾尔息图的地址上位机离线规划产生各模块的运动序列经中转单元处理后通过信号线向所有模块进行广
播模块单元采用作为微控制器使
用带地址检测方式接收数据若接收到的地址与模
块自身地址相同则接收随后的控制数据否则对控制数据不予理睬模块的控制系统结构如图所示
电源模块
霆日覆目
·
口兀
电动机控制单元控制单元
建立了一个由个机器人模块组成的机器人系统对模块的基本功能和整体协调运动功能进行了试验验证机器人模块基本功能试验每个机器人模块只有一个转动自由度所以需要多个模块配合进行运动两个模块配合时有两种运动模式一种是在竖直平面内的翻滚运动如图所示在底层模块的辅助下两个模块通过翻滚
向左走过一个模块的距离底层模块对运动模块提供联接平面另一种是在水平面内的侧翻运动如图所示通过侧翻运动两个模块向右移动一个
模
块的距离两模块运动的试验同时验证了模块之间可靠的联接断开功能三个模块配合运动可以实
现模块的联接平面的方位变换如图所示两个
模块配合旋转将侧面携带模块的联接面由水平方
向转换到了竖直方向通过三种基本运动形式的组合模块机器人可以实现可重构过程
图模块控制系统结构框图
软件系统结构为对机器人模块运动进行有效的规划和控制使用和开发了上位机软件系统该系
统可以通过交互方式设置各机器人模块的方位可手工编写或自动产生可重构机器人各模块的运动序
列可对机器人整体构型的协调运动进行规划和仿真并通过计算机串口可对机器人进行实时控制
软件系统界面如图所示由图形显示区运动序列显示区和菜单命令区等组成用户可以通过菜单
命令或鼠标设置机器人的初始构型和目标构型计算机自动规划出从初始构型到目标构型的各个模块的运动序列显示在运动序列显示区用户也可以手工编写运动序列在图形显示区显示运动序列执
行结果的仿真运动序列可以通过计算机串口传送
到中转单元经中转单元处理后实时控制模块机器人运动
机器人模块整体协调运动
机器人模块整体协调运动也是可重构机器
人
研究的一个重要内容为有效地进行运动仅靠可重构过程中的整体移动显然并不理想提出的可重
构机器人模块除可通过可重构过程完成特定构型之间的自动转换外对于特定的整体构型还可以实现整体协调运动图所示为蠕虫构型一个梯形波的传递过程通过梯形波由后向前传递蠕虫构型可以实现向前爬行图所示为四足构型四肢依次向
前迈动一步的部分运动照片图为履带式构型滚动运动试验部分照片试验得知蠕虫构型运动的速度约为耐四足构型的运动速度约为岁履带式滚动运动的速度约为岁
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net