瑞士直线电机Linear_Motors_v2.1_chinese
- 格式:pdf
- 大小:3.69 MB
- 文档页数:9
伺服电机直线电机工作原理A servo motor is a rotary actuator or linear actuator that allows for precise control of angular or linear position, velocity and acceleration. 伺服电机是一种可以精确控制角度或线性位置、速度和加速度的转动致动器或直线致动器。
Servo motors are used in a variety of applications, such as robotics, CNC machinery, conveyor systems, and more. 伺服电机广泛应用于各种领域,如机器人技术、数控机械、输送系统等。
The working principle of a servo motor involves the use of a feedback control system to accurately position the motor shaft. 伺服电机的工作原理涉及使用反馈控制系统来精确定位电机轴。
This is achieved by continuously comparing the actual position of the shaft to the desired position and adjusting the motor's control inputs accordingly. 这是通过不断比较轴的实际位置和期望位置,并相应地调整电机的控制输入来实现的。
The feedback control system typically utilizes a rotary encoder or linear encoder to provide position feedback to the motor controller. 反馈控制系统通常使用旋转编码器或线性编码器向电机控制器提供位置反馈。
15 开关磁阻电机本章我们将简化RMxprt 一些基本操作的介绍,以便介绍一些更高级的使用。
有关RMxprt 基本操作的详细介绍请参考第一部分的章节。
15.1基本理论开关磁阻电机的定子和转子均为凸极结构,通常定子的极对数大于转子的极对数。
定子磁极上有多相集中绕组,转子上无绕组。
当定子上某(些)绕组通电时,由于磁阻的差异,转子将受到力矩的作用,转子磁极向与定子磁极对齐(磁阻最小)的位置转动,以使定子绕组获得最大的磁链。
绕组的相数是定子极数与定、转子极数的最小公约数之比。
在开关磁阻电动机(SRM)中,定子和转子的极数不同,转子上设有位置传感器,定子电流严格地根据转子的位置换向。
转子的位置信号通过位置传感器获得。
定子绕组按顺序触发,一般情况下当一相绕组电流关断或快要关断时,下一相绕组被触发。
因此可以忽略两相绕组间的相互影响。
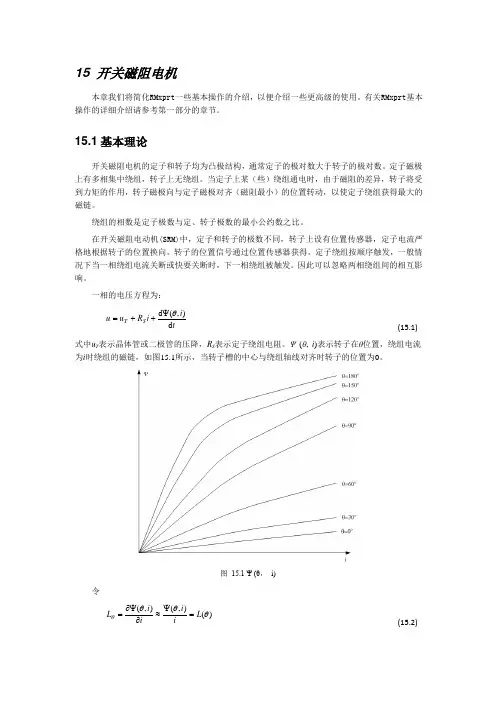
一相的电压方程为: t i i R u u S T d ),(d θψ++= (15.1)式中u T 表示晶体管或二极管的压降,R S 表示定子绕组电阻。
Ψ (θ, i )表示转子在θ位置,绕组电流为i 时绕组的磁链,如图15.1所示,当转子槽的中心与绕组轴线对齐时转子的位置为0。
图 15.1 Ψ (θ, i)令)(),(),(θθθθL i i i i L =ψ≈∂ψ∂= (15.2))(),(θθθθθG L i i 1G =∂∂≈∂ψ∂=(15.3)得出 i G i L i R u u e S T ωθ+++=p(15.4)式中ωe 表示转速,用电角度表示,微分算子为: t d dp = (15.5)瞬时电磁转矩t 2为:22Gi 21t = (15.6) 输入电功率可由电压和电流获得:⎰=T 1t ui T 1P 0d (15.7)输出的机械功率为:)(Fe t Cua fw 12P P P P P P +++-= (15.8) 式中P fw ,P Cua ,P t 和P Fe 分别表示摩擦和风损耗、电枢铜损耗、晶体管/二极管压降损耗和铁心损耗。
现代电子技术Modern Electronics TechniqueApr. 2024Vol. 47 No. 82024年4月15日第47卷第8期0 引 言SWISS 整流器由Kolar 教授在2011年首次提出,是一种具有输出直流母线电压可控、输出电压范围宽、输入电流谐波含量低、转换效率高的单向降压型三相PFC整流器[1⁃4]。
该整流器非常适用于有大功率需求的场合,在电动汽车充电、数据中心供电、大功率照明等领域具有广阔的应用前景[5⁃6]。
由于SWISS 整流器的拓扑结构提出相对较晚,相关研究内容较少,尚无专用的模拟控制芯片可以实现其功能,且模拟控制存在环路设计困难、电路设计复杂、功能不易扩展等缺点。
而采用数字控制的方式,可通过程序实现系统的环路控制,具有开发周期短、控制灵活、电路设计简单、方便进行数据监控等优点[7]。
为验证SWISS 整流器采用数字控制方案的可行性,本设计使用STM32F334控制器作为SWISS 整流器的控制核心,并制作400 V/1 000 W 样机对该方案进行验证。
1 系统方案设计采用数字控制的SWISS 整流器的设计分为硬件电路设计与软件算法设计两个部分。
硬件电路主要有主拓扑电路、控制器电路、驱动电路、采样电路以及保护电路;软件算法主要有闭环控制算法、PLL 锁相环算法以及采样滤波算法。
系统原理框图如图1所示。
DOI :10.16652/j.issn.1004⁃373x.2024.08.017引用格式:刘新贺,马山刚,金福宝,等.基于STM32的SWISS 整流器研究与设计[J].现代电子技术,2024,47(8):107⁃112.基于STM32的SWISS 整流器研究与设计刘新贺, 马山刚, 金福宝, 石进强, 祁延明(青海大学 能源与电气工程学院, 青海 西宁 810016)摘 要: SWISS 整流器具有输出功率高、输出电压可调、易高频化等特点,十分适合用于电动汽车大功率充电、数据中心、通信基站等大功率变换场合。
交流永磁直线电机及其伺服控制系统的设计摘 要直线电机在各行各业中发挥着越来越重要的作用,特别是在机床进给驱动系统中。
本文以平板式交流永磁同步直线电机为研究对象,从电机机体到伺服驱动系统的软、硬件设计作了深入研究。
本文首先介绍了交流永磁同步直线电机机体设计过程中电枢绕组、铝芯和定子磁钢的设计和改进方法,较大程度上减小了推力波动,并且结合大推力直线电机的特点设计了方便有效的装配过程。
建立交流永磁同步直线电机的数学模型,在此基础上分析了当今最通用的伺服控制策略,选择了矢量控制方法。
确定 0 = d i 的矢量控制实现形式。
通过 SVPWM 方法进行脉宽调制,合成三相正弦波。
选用 TI 公司2000 系列最新 DSP TMS320F2812,深入研究了以上算法在 DSP 中的实现形式。
采用了 C 语言和汇编语言混合编程的实现方法。
在功率放大装置中, 以智能功率模块 IPM 为核心,设计了功率伺服驱动系统。
还包括电流采样、光电隔离、过压欠压保护和电源模块等。
由于知识和能力的限制,本次课题只对直线电机做一些理论研究。
关键词:永磁同步直线电机 DSP SVPWM 矢量控制AbstractLine motors are playing a more and more important role in all kinds of trade ,especially in machine tool feed system. We carry out our study in motor , softwareand hardware servo system based on flat AC permanent magnet synchronous linearmotor(PMSLM).First introduce the design method of armature ,core of al and magnet whichcan minish the thrust ripples, then introduce the means of assembly base on highthrust permanent magnet synchronous motors.To ensure the accuracy to a high requirements and get a wide speed range, wechoose the dsp of Texas Instruments named TMS320F2812 which is the core of theservo system .In the paper we set up mathematical model of PMSLM, then analysethe current control strategies and choose the vector control method which is realizedby the method of 0 = d i .The three phase sine wave is compounded by spacevoltage pulse width modulation(SVPWM).The arithmetic realized by C language andassembly language in DSP. Intelligent Power Model (IPM) is the core of the poweramplification circuit system which also contains current sampling circuit,photoelectricisolation circuits, overvoltage protection circuits, undervoltageprotection circuits and power supply.As a result of the knowledge and ability limit, this topic only does a fundamentalresearch to the linear motor.Key words: permanent magnet synchronous linear motor(PMSLM), DSP ,SVPWM, vector control目 录摘要 中文 (I)英文 (II)第一章 绪 论 (I)1.1 研究背景和意义 (1)1.2 直线电机的运行原理及特点 (2)1.2.1 直线电机的基本运行原理 (2)1.2.2 直线电机进给系统优缺点分析 (3)1.3 直线电机发展历史及其伺服控制系统的研究综述 (4)1.3.1 国内外直线电机历史、现状及发展 (4)1.3.2 直线电机伺服控制系统的研究综述 (7)1.3.3 试验研究 (10)1.4 本文主要研究内容 (10)第二章 永磁永磁直线同步电机基本结构 (11)2.1 实验用交流永磁同步电机基本结构........................................................错误!未定义书签。
直线电机式主动悬架协调车身姿态控制研究谢健;汪若尘;叶青;孟祥鹏;陈龙【摘要】将直线电机作为汽车主动悬架的作动器,能实现悬架的主动减振.建立整车主动悬架的动力学模型和直线电机的数学模型,输入三相交流电,测试直线电机的电磁力,仿真与试验的结果较为一致,验证了电机数学模型的正确性.基于整车姿态协调控制原理,结合模糊控制理论和电流滞环控制策略,研究了包含直线电机作动器的车辆主动悬架的动态响应.结果表明,该控制策略可行,且控制系统能有效改善车辆舒适性和行驶安全性,车身姿态也得到有效控制.【期刊名称】《汽车工程学报》【年(卷),期】2015(005)005【总页数】7页(P341-347)【关键词】主动悬架;直线电机;姿态;模糊控制;电流滞环【作者】谢健;汪若尘;叶青;孟祥鹏;陈龙【作者单位】江苏大学汽车工程研究院,江苏,镇江212013;江苏大学汽车工程研究院,江苏,镇江212013;江苏大学汽车工程研究院,江苏,镇江212013;江苏大学汽车工程研究院,江苏,镇江212013;江苏大学汽车工程研究院,江苏,镇江212013【正文语种】中文【中图分类】TP391.9车辆的舒适性和操纵稳定性很大程度上由悬架系统决定。
为此,国内外学者已对主动悬架控制方法进行了比较完整的研究。
但是,对于悬架系统中作动器的研究却比较少见。
2004年,Bose公司应用直线电机设计了一种电磁悬架,该电磁悬架减振性能卓越,对车辆制动时的车身前倾、转弯时的车身侧倾和越障时的车身振动有显著的抑制作用,而且在抵消道路冲击的同时可回收部分能量[1]。
2006年,Martins等人研制了圆筒型永磁直线电机作动器,基于天棚阻尼原理,设计了电机作动器的闭环控制系统[2]。
2012年,罗虹等人对主动悬架采用的直线电机控制系统进行了研究,分析了PI参数对电磁力的影响[3]。
同年,陈星等人设计了直线电机馈能悬架的控制系统,并进行了馈能分析[4]。
2014年,陈冬云等人采用电磁作动器功率流计算方法分析了馈能主动悬架的可回馈能量[5]。
收稿日期:2002-11-25基金项目:国家自然科学基金资助项目(59775064)作者简介:赖国庭(1977-),男,广东汕头人,硕士研究生,主要研究方向为机电一体化原理及应用等。
控制工程Control Eng ineering of China Nov.2003Vol.10,No.62003年11月第10卷第6期文章编号:1671-7848(2003)06-0555-03基于PMAC 的直线电机速度/加速度前馈控制赖国庭1,吴玉厚2,富大伟2(1 沈阳建筑工程学院自动控制系,辽宁沈阳 110015;2 沈阳建筑工程学院机械工程系,辽宁沈阳110015)摘 要:论述了PM AC 运动控制器的性能及其伺服控制功能;简述了直线电机的伺服控制策略;提出了基于PM AC 的直线电机速度/加速度前馈控制算法;对算法中各个参数的作用做了简单的介绍,阐述了速度前馈和加速度前馈参数的性能及其调整。
通过实验得到证明,引入适当的速度和加速度前馈,可较好地补偿系统的跟随误差,从而提高系统的性能。
关 键 词:PM AC;直线电机;前馈控制中图分类号:T M 383 4 文献标识码:A1 引 言由于传统的 旋转电动机+滚珠丝杠 伺服进给方式难以满足加工精度和速度要求,因而,直线电机的精密进给加工方式开始出现。
虽然直线电机在机械结构方面得到大大简化,没有中间传动环节,伺服系统的刚性得到很大提高,由于中间传动环节所带来的误差也得到了较好的改善,但相对应也给电气控制带来了更高的要求。
如何在传统控制方式基础上,充分利用计算机控制技术,实现对直线交流伺服系统的精密控制,就变得尤为重要和紧迫。
基于上述分析,本文提出了基于PMAC 的直线电机速度/加速度前馈控制。
2 PMAC 运动控制器将机床运动控制、逻辑控制功能由独立的运动控制器完成,运动控制器通常以PC 硬件插件的形式构成系统。
数控上层软件(数控程序编辑、人机界面等)以PC 为平台,运行于Window s 等主流操作系统上,这已成为开放式数控系统发展的主流结构模式。
「讲解」电机仿真案例介绍!讲解直线电机或发电机的建模仿真来源:机械社区“AC/DC 模块”中的旋转机械,磁场物理场接口可用于模拟旋转机械,如电动机或发电机。
利用磁场和移动网格这两个物理场接口模拟直线设备或管式设备时,定制的线性周期性边界条件是非常适合的。
在本篇文章中,我们将探索如何定制线性周期性边界条件,并模拟用于波浪能的管式发电机。
直线电机或发电机直线电机 (LEM) 是一种能进行直线运动的机电设备,无须使用任何机构它就能将旋转运动转换为直线运动。
直线电机和旋转电机相似,定子和转子沿径向平面被切割并展开以提供线性推力。
相同的电磁力在旋转电机中产生扭矩,在直线电机中则产生直接的线性力。
值得一提的是,“AC/DC 模块”中的旋转机械,磁场接口包含模拟旋转机器所需的所有功能部件。
该接口结合了磁场接口;磁场,无电流接口和移动网格接口。
经定制后此接口适用于模拟旋转机器,由此极大地简化了静态域和旋转域的定义,以及两者之间接口的处理。
在模拟模型的扇形区域或某一部分以获得完整设备的仿真结果时,扇区对称和周期性边界条件这样的功能部件也极其有用。
尽管该接口显著减少了建立旋转运动模型所需的工作,但直线运动中不能使用该接口。
下面,我们将演示如何对磁场和移动网格这两个物理场接口定制耦合来模拟管式发电机。
另外,还会解释如何创建线性周期性边界条件,这是利用广义拉伸算子模拟直线/管式电机或发电机的一个重要元素。
用于波浪能转换系统的管式发电机管式电机在许多应用中受到青睐,从车辆的主动悬架系统到潮汐能和波浪能转换系统都有涉及。
管式电机的传输效率比传统的直线和旋转转换系统高出许多,因为推力直接作用于负载。
管式电机的另一个优势是,没有定子端部绕组。
因此,铜损相对较少,永磁材料的利用率很高。
下面,我们将讨论对管式发电机进行模拟的技巧(如下图所示)。
管式发电机包含两个主要零件:一个静态定子和一个作直线移动的滑块。
定子由三相绕组和一个非线性磁芯构成。