PWM 整流器电流控制技术
- 格式:pdf
- 大小:436.05 KB
- 文档页数:4



PWM整流工作原理1.开关电源:PWM整流电路由一对开关电路组成,通常是MOSFET或IGBT(绝缘栅双极晶体管)。
2.控制信号:通过其中一种控制算法,将输入的直流电源信号转换为控制开关的PWM信号。
控制算法通常基于反馈控制,可以使用PID(比例积分微分)控制器或其他控制算法。
3. PWM信号:PWM信号是脉冲信号,其占空比(Pulse Width)根据控制算法的输出变化。
占空比是指PWM信号高电平持续的时间与一个周期内总时间的比例。
通过调整占空比,可以控制开关电路的导通和断开时间。
4.输出滤波:PWM信号通过一个滤波电路,将其转换为平滑的直流输出。
滤波电路通常是一个电感和电容的组合,用于滤除PWM信号中的高频噪声。
5.输出电压:整流电路将滤波后的PWM信号转换为输出电压。
当PWM信号高电平时,开关电源导通,将直流电源的电能储存在电感中。
当PWM信号低电平时,开关电源断开,电感中储存的能量被转移到输出电容上,供电给负载。
6.负载控制:输出电压经过调整和稳压电路控制,以保持恒定的输出电压。
控制电路根据负载的变化,调整PWM信号的占空比,以保持输出电压的稳定性。
1.高效性:PWM整流技术可以通过准确控制开关的导通和断开时间,最大限度地减少功率损耗,并提高整流电路的效率。
2.精确控制:PWM信号的占空比可以很容易地调整,以实现对输出电压的精确控制。
由于PWM整流技术可提供高频开关特性,因此调整输出电压的响应速度非常快。
3.可靠性:PWM整流电路中的开关元件通常由可靠的MOSFET或IGBT 组成,其寿命较长。
此外,PWM整流技术还具有较少的电磁干扰和噪声。
4.小尺寸:由于高效性和精确控制的特性,PWM整流电路可以使用较小的电感和电容组件,从而减小整流电路的体积。
5.可调度:PWM整流技术可以适应各种负载变化,通过调整占空比,以保持稳定的输出电压和电流。
总之,PWM整流工作原理是基于PWM信号控制开关导通和断开时间,实现高效的切换电流输出。

第6章 PWM 控制技术1.试说明PWM 控制的基本原理。
答:PWM 控制就是对脉冲的宽度进行调制的技术。
即通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值)。
在采样控制理论中有一条重要的结论:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同,冲量即窄脉冲的面积。
效果基本相同是指环节的输出响应波形基本相同。
上述原理称为面积等效原理以正弦PWM 控制为例。
把正弦半波分成N 等份,就可把其看成是N 个彼此相连的脉冲列所组成的波形。
这些脉冲宽度相等,都等于π/N ,但幅值不等且脉冲顶部不是水平直线而是曲线,各脉冲幅值按正弦规律变化。
如果把上述脉冲列利用相同数量的等幅而不等宽的矩形脉冲代替,使矩形脉冲的中点和相应正弦波部分的中点重合,且使矩形脉冲和相应的正弦波部分面积(冲量)相等,就得到PWM 波形。
各PWM 脉冲的幅值相等而宽度是按正弦规律变化的。
根据面积等效原理,PWM 波形和正弦半波是等效的。
对于正弦波的负半周,也可以用同样的方法得到PWM 波形。
可见,所得到的PWM 波形和期望得到的正弦波等效。
2.设图6-3中半周期的脉冲数是5,脉冲幅值是相应正弦波幅值的两倍,试按面积等效原理计算脉冲宽度。
解:将各脉冲的宽度用i(i =1, 2, 3, 4, 5)表示,根据面积等效原理可得1=m5m 2d sin U t t U ⎰πωω=502cos πωt - =0.09549(rad)=0.3040(ms)2=m525m 2d sin U t t U ωϖππ⎰=5252cos ππωt -=0.2500(rad)=0.7958(ms)3=m5352m 2d sin U t t U ωϖππ⎰=53522cos ππωt -=0.3090(rad)=0.9836(ms)4=m5453m 2d sin U t t U ωϖππ⎰=2=0.2500(rad)=0.7958(ms)5=m54m2d sin U tt Uωϖππ⎰=1=0.0955(rad)=0.3040(ms)3. 单极性和双极性PWM 调制有什么区别?三相桥式PWM 型逆变电路中,输出相电压(输出端相对于直流电源中点的电压)和线电压SPWM 波形各有几种电平?答:三角波载波在信号波正半周期或负半周期里只有单一的极性,所得的PWM 波形在半个周期中也只在单极性范围内变化,称为单极性PWM 控制方式。

pwm整流电路工作原理一、前言PWM整流电路是一种常见的电路,它主要用于将交流电转换为直流电。
本文将详细介绍PWM整流电路的工作原理。
二、PWM技术简介PWM技术是指通过改变信号的占空比来控制电源输出的一种技术。
在PWM技术中,周期保持不变,而占空比则可以根据需要进行调节。
当占空比为0时,输出为0;当占空比为100%时,输出为最大值。
三、PWM整流电路基本结构PWM整流电路包括三个部分:输入滤波器、PWM调制器和输出滤波器。
其中输入滤波器用于平滑交流输入信号;PWM调制器用于控制直流输出信号的大小;输出滤波器用于平滑直流输出信号。
四、输入滤波器输入滤波器主要由一个电容和一个电感组成。
它的作用是平滑交流输入信号,并减小噪声干扰。
当交流输入信号经过输入滤波器后,会变成一个近似直流的信号。
五、PWM调制器PWM调制器主要由一个比较器和一个三角形波发生器组成。
它的作用是根据需要改变直流输出信号的大小。
当三角形波发生器的输出电压高于比较器输入信号时,输出为高电平;当三角形波发生器的输出电压低于比较器输入信号时,输出为低电平。
通过改变三角形波发生器的频率和占空比,可以控制直流输出信号的大小。
六、输出滤波器输出滤波器主要由一个电容和一个电感组成。
它的作用是平滑直流输出信号,并减小噪声干扰。
当直流输出信号经过输出滤波器后,会变得更加平稳。
七、工作原理PWM整流电路的工作原理如下:1. 输入滤波器将交流输入信号平滑成近似直流的信号。
2. PWM调制器根据需要改变直流输出信号的大小。
3. 输出滤波器将直流输出信号平滑,并减小噪声干扰。
4. 最终得到符合要求的直流电源。
八、总结本文详细介绍了PWM整流电路的工作原理。
通过对输入滤波器、PWM调制器和输出滤波器等部分进行分析,我们可以更好地理解PWM整流电路是如何将交流电转换为直流电的。
三相pwm整流器工作原理三相PWM整流器工作原理。
三相PWM整流器是一种常见的电力电子器件,它的工作原理主要涉及到PWM调制和整流两个方面。
在电力系统中,三相PWM整流器通常被用于控制交流电到直流电的转换,它具有高效、可控性强等优点。
下面我们将详细介绍三相PWM整流器的工作原理。
首先,我们来看PWM调制的原理。
PWM(Pulse Width Modulation)即脉宽调制技术,它通过改变脉冲信号的宽度来实现对电压的调节。
在三相PWM整流器中,PWM调制主要用于控制开关管的导通和截止,从而实现对交流电的整流。
当输入的交流电信号经过PWM调制后,输出的脉冲信号就可以控制开关管的导通时间,从而实现对输出电压的调节。
这种调制方式可以保证输出电压的稳定性和可控性,是三相PWM整流器的关键工作原理之一。
其次,我们来讨论整流的原理。
在三相PWM整流器中,整流是指将输入的交流电转换为直流电的过程。
通过PWM调制,开关管可以控制交流电的导通和截止,从而在输出端得到一个近似直流的电压信号。
整流过程中,需要注意输出电压的稳定性和纹波的控制,这需要通过合理的PWM调制和滤波电路来实现。
整流过程的稳定性和效率直接影响着整个系统的性能和可靠性,因此整流是三相PWM整流器工作原理中非常重要的一环。
综上所述,三相PWM整流器的工作原理主要涉及到PWM调制和整流两个方面。
通过PWM调制,可以实现对交流电的控制和调节;而整流过程则是将交流电转换为直流电的关键步骤。
三相PWM整流器以其高效、可控性强等优点在电力系统中得到了广泛应用,它的工作原理对于理解和设计电力电子系统具有重要意义。
希望本文能够对读者加深对三相PWM整流器工作原理的理解有所帮助。
pwm整流器工作原理
PWM整流器是一种电子设备,用于将交流电信号转换成直流
电信号。
它基于脉冲宽度调制(PWM)的原理工作。
工作原理如下:
1. 输入信号:PWM整流器的输入是交流电信号,通常为
50Hz或60Hz的正弦波。
2. 整流:通过使用扫描开关和滤波电容,交流电信号被整流成脉冲信号。
3. PWM调制:脉冲信号的宽度通过PWM调制技术进行控制。
PWM调制器根据需要生成一个高频的方波信号,并与整流得
到的脉冲信号进行比较。
4. 控制器反馈:PWM整流器的控制器根据PWM调制器输出
的方波信号与脉冲信号的比较结果,对脉宽进行调整。
5. 输出滤波:调整后的脉冲信号通过输出滤波电路进行滤波,以去除高频噪音。
6. 输出电压:最终输出的信号是直流电信号,它的波形与PWM调制信号的调制比例成正比。
整个过程中,PWM整流器的控制器不断地监测输出电压,并
做出相应的调整,以使输出电压稳定在预设的数值。
这种控制
方式允许PWM整流器在输入电压和负载变化时保持较稳定的输出电压。
总的来说,PWM整流器通过对输入交流电信号进行整流、PWM调制和控制器反馈等步骤,将其转换成稳定的直流电信号。
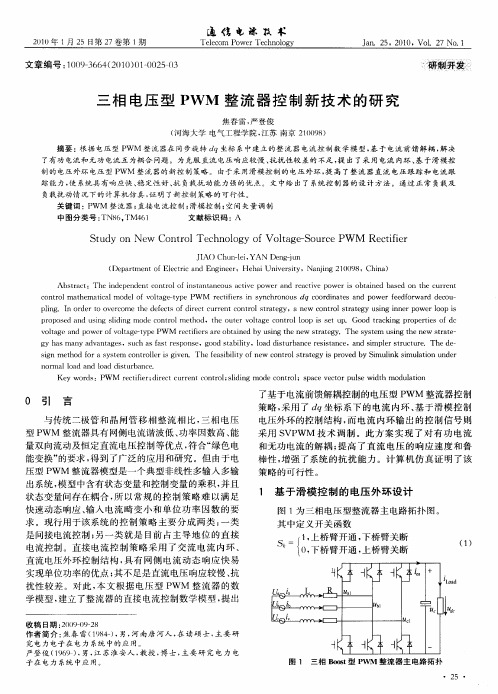
2.3 PWM 整流器电流控制技术
由以上对三相PWM 整流器的建模分析可知,PWM 整流器能同时完成直流电压和交流侧电流的控制。
目前,间接电流控制和直接电流控制是VSR 两种主要的控制策略[30]。
间接电流策略简单,不需要进行电流反馈,依据电路关系,通过对整流器交流侧基波电压的控制来控制交流侧电流。
但间接电流控制主要缺点是电流动态响应慢,依赖于电路参数的准确性。
直接电流控制包括:滞环电流控制、固定开关频率电流控制、空间矢量电流控制等,这些策略能够实现电流快速响应,具有较好的动态相应性能。
2.3.1 PWM 整流器间接电流控制技术
间接电流控制通过对PWM 整流器交流侧基波电压的控制,实现对交流侧电流的控制,该控制策略无需对交流侧电流进行采样闭环,因而是一种相对简单的VSR 电流控制方案[31]。
设三相对称,以A 相为例,设A 相交流输入电压为E ,交流侧电流为I ,滤波电感为L ,线路电阻为R ,整流器交流侧基波电压为V ,则由戴维南电压定律可得:
()j L R ω=++E V I (2-33)
当E 、L 、R 确定时,通过PWM 控制VSR 输出的交流侧基波电压V ,便能间接控制交流侧电流I 。
设:
()sin()
()sin()E t E t I t I t ωωϕ=⎧⎨
=+⎩
(2-34) 则根据(2-33)式可计算得此时VSR 交流基波电压瞬时表达式为:
()sin()sin()sin()2
V t E t LI t RI t π
ωωωϕωϕ=-++-+ (2-35)
从而,如果可以控制VSR 交流侧输出式(2-35)所描述的基波电压,则此时交流侧的电流即为()sin()I t I t ωϕ=+。
通过该控制ϕ角值便能实现对功率因素的控制,当ϕ角等于0时,PWM 整流器属于单位功率因数运行状态。
使用SPWM 算法,设三角载波的幅值为±U T ,当载波频率足够高时,可忽略VSR 交流侧的谐波电压,当A 相的调制正弦信号为:
()sin()ma m u t U t ωγ=+ (2-36)
则与其对应VSR 交流侧基波电压表达式为:
()sin()2m dc a T
U U
u t t U ωγ=+ (2-37)
式中dc U 为VSR 直流侧电压,当三角载波的幅值为±1时,由式(2-36)和式(2-37)可知,只需将所需的交流侧基波电压乘以2
dc
U ,即可得到该交流侧基波电
压所对应的正弦调制信号。
三相VSR 使用直流电压进行PI 闭环控制,输出得到交流指令信号。
三相VSR 间接电流控制系统结构如图2-5所示。
o
E sin(ωt )
e a
e b e c
R s L L L
R s R s
v v dc *
ωL sin(ωt+φ+90°)R sin(ωt+φ)E sin(ωt-120°)
ωL sin(ωt+φ-30°)R sin(ωt+φ-120°)
ωL sin(ωt+φ+210°)
R sin(ωt+φ+120°)
2/Udc
2/Udc 2/Udc
E sin(ωt+120°)I *
SPWM
PI
图2-5 三相VSR 间接电流控制系统结构
Fig. 2-5 Three-phase VSR indirect current control system structure
间接电流控制策略结构简单,但该方案依赖于系统参数的准确性,系统中L 、R 的误差将引起控制偏差。
此外,由于该控制算法建立在静态基础上,因而其
动态性能较差。
2.3.2 PWM 整流器滞环电流控制技术
直接电流控制带有网侧电流闭环,对网侧电流进行直接控制,因而其具有较好的动、稳态性能,对系统参数不敏感,从而增强了系统电流控制的稳定性[32]。
直接电流控制主要包括固定开关频率PWM 控制和滞环PWM 电流控制等。
固定开关频率PWM 控制的算法简单,且由于其开关频率固定,非常有利于网侧
变压器和滤波电感的设计,固定开关频率PWM 控制算法主要缺点是当开关频率不高的情况下,其电流动态响应较慢,且动态电流偏差受电流变化率影响。
滞环PWM 控制具有较快的电流响应速度[33],其电流动态跟踪偏差只跟滞环宽度有关,不随电流变化率发生变化。
但由于滞环PWM 的开关频率不固定,从而造成网侧滤波电感不好设计,而且该控制方案造成功率器件开关损耗和应力增大,因而很难应用于大功率场合。
下面主要介绍滞环PWM 原理。
D D C
C
v dc
e s
图2-6 VSR 单桥臂电路图
Fig. 2-6 VSR single bridge arm circuit diagram
首先分析单桥臂VSR 滞环PWM 电流控制,如图2-6所示为VSR 单桥臂电路图,为方便分析引入单极性二值逻辑开关函数:
1122
0(V D )
1(V D )s ⎧=⎨⎩、导通、导通 (2-38)
由图2-6可得:
[(1)]
(1)dc dc dc s
s dc dc dc
dc s dc dc s v v v Lpi e sv s v v Cpv si R v Cpv s i R
+-
+-+-=-⎧⎪=---⎪⎪⎨=-⎪
⎪=-+⎪⎩ (2-39) 式中:p 为微分算子,分析可得:
当s =1时,
s s dc Lpi e v +=- (2-40)
当s =0时,
s s dc Lpi e v +=- (2-41)
根据s i 、dc v +、dc v -的参考方向,要实现滞环PWM 电流控制必须满足:
||dc sm
dc sm v E v E +-
>⎧⎨
>⎩ (2-42) 式中:E sm 为电网电动势的峰值。
根据i s 的参考方向分析可得:当V 1、D 1导通时,pi s <0,电流减小;当V 2、D 2导通时,pi s >0,电流增大。
因此,当V 2导通,电流i s 一直增大到超出电流滞环上限时,则关断V 2,此时由于电感的续流作用使得D 1导通,从而电流i s 开始衰减。
如果此时正弦电流i s 处于正半波,则即使给V 1开通信号,V 1也无法导通,只有i s 处于负半波时,V 1才导通。
但若忽略V 1和D 1的管压降,V 1和D 1对交流段电位的影响是一样的。
同理可分析V 2、D 2的换相过程[34]。
三相VSR 滞环PWM 电流控制结构如图2-7所示。
采用VSR 滞环PWM 电流控制能够取得快速的电流响应,但在PWM 控制过程中,开关频率不固定,开关频率过大会造成较大的功率器件开关损耗。
因此必须对电流滞环策略的开关频率进行控制。
PI
i a
X
X
驱动
驱动
驱动
i c
i c *
i a *
i b *
e a
e c
u dc
u dc *
s a
s b
s c
a+s a-
b-
b+s c+s c-
图2-7 三相VSR 滞环PWM 电流控制结构
Fig. 2-7 Three-phase VSR hysteresis PWM current control structure。