火炮反后坐装置优化设计
- 格式:docx
- 大小:167.72 KB
- 文档页数:7
大口径舰炮反后坐装置快速设计模块开发曹中臣;姚忠;汪永忠;夏方超;苗圃【摘要】In order to improve the design efficiency of a large caliber naval gun recoil mechanism,a development method of rapid design module was proposed. In accordance with the theory of 3D assem-bly model parametric design by means of program control,design knowledge and experience are em-bedded in a functional module,which is enunciated in the form of design process. As a result,a de-sign method integrating program calculation,graphic output of the recoil curve and parameter driving comes into being. The rapid design module of a large caliber naval gun was set up through the use of top-down parameter modeling method,the mixed programming between VC and Matlab,and the de-sign of MFC interface. Finally,the feasibility and availability of the rapid design module were verified with a large caliber naval gun recoil mechanism experimental set-up. This module development method offers a reference for artillery engineering design.%为了提高大口径舰炮反后坐装置的设计效率,对其进行了快速设计模块开发研究。
前冲式反后坐装置设计研究的开题报告一、课题背景及研究意义前冲式反后坐装置是一种利用推进气流反向喷射以减少枪口后坐力的附件装置。
当前常见的反后坐装置主要为枪口制动器、减震器、后坐力矫正杆等装置。
枪口制动器通过喷口将枪口火药燃气反向喷出,以减少后坐力;减震器则是通过依靠减震材料将后坐力转移至固定部位以减少后坐力;后坐力矫正杆主要通过改变枪口和随机反冲锤的运动方向以减少后坐力。
但以上装置均存在设计复杂、使用不便、效果不佳等问题。
因此研究开发新型反后坐装置是一个具有实际意义和应用前景的问题。
本课题旨在开发一种简单、实用、有效的前冲式反后坐装置,探索其应用范围和效果,并为枪支制造和使用提供有益的技术支撑。
二、研究内容及方案1. 研究前冲气流的流场特性,建立数学模型;2. 设计前冲喷嘴和反向喷射通道;3. 制备分离气流阀门和控制系统;4. 建立前冲式反后坐装置的系统设计和性能测试方法;5. 验证和调整系统设计,得出实测效果数据;6. 优化设计方案,提高前冲式反后坐装置的效果和实用性。
三、研究计划及进度安排(1)前期准备(1个月)分析国内外相关研究进展,确定研究内容和方案,确定设计要素和技术路线。
(2)理论计算及数学模型建立(2个月)进行前冲气流的流场特性分析,建立数学模型,优化前冲喷嘴和反向喷射通道结构。
(3)制备阀门和控制系统(1个月)设计制作分离气流阀门和控制系统。
(4)系统性能测试(2个月)建立前冲式反后坐装置的系统设计和性能测试方法,对系统进行性能测试,得出实测效果数据。
(5)效果优化和设计方案调整(2个月)根据实测效果数据,优化设计方案,提高前冲式反后坐装置的效果和实用性。
四、预期成果1. 建立前冲气流的数学模型,深入探究前冲式反后坐装置的流场特性和动力学原理;2. 设计出简单、实用、有效的前冲喷嘴和反向喷射通道,制作分离气流阀门和控制系统;3. 实现前冲式反后坐装置的实验制作和性能测试,得出实测效果数据;4. 优化设计方案,提高前冲式反后坐装置的效果和实用性。
第42卷第5期2021年5月哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报Journal of Harbin Engineering UniversityVol.42ɴ.5May 2021某火炮反后坐装置区间不确定参数辨识鲍丹1,赵抢抢2,侯保林1(1.南京理工大学机械工程学院,江苏南京210094;2.江苏金陵智造研究院有限公司,江苏南京210006)摘㊀要:为了实现辨识并提高辨识效率,在火炮反后坐过程数学模型的基础上建立神经网络模型㊂根据不确定参数在一次发射动作过程中的变化特性,将火炮反后坐装置待辨识的参数分为2类,并利用区间数描述系统中的不确定参数㊂针对第1类参数,通过区间理论中的区间可能度数学模型将区间不确定问题转换为确定性优化问题,以反映数值仿真结果与试验结果的相似程度的时间序列数据相似度作为优化目标,再运用粒子群算法实现辨识㊂在已辨识第1类参数的基础上,结合粒子群算法和区间优化方法对第2类参数的区间进行优化㊂结果表明:本文提出的辨识方法具有可行性和有效性㊂关键词:反后坐装置;参数辨识;区间可能度;曲线相似度;粒子群算法;不确定性优化;神经网络;区间优化DOI :10.11990/jheu.201908007网络出版地址:http :// /kcms /detail /23.1390.u.20210302.1024.008.html 中图分类号:TJ33㊀文献标志码:A㊀文章编号:1006-7043(2021)05-0687-07Identification of uncertain interval parameters ofcannon recoil mechanismBAO Dan 1,ZHAO Qiangqiang 2,HOU Baolin 1(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,China;2.Jiangsu Jinling insti-tute of intelligent manufacturing Co.Ltd,Nanjing 210006,China)Abstract :To realize identification and improve identification efficiency,a neural network model is built after the mathematical model of the cannon recoil process was established.The parameters to be identified are divided into two categories according to the changing characteristics of uncertain parameters in a circle of the launching process.The interval number is used to describe uncertain parameters of the system.Meanwhile,the similarity of time series data that reflects the similarity between numerical simulation and test results is taken as an optimization objective.For the first parameter type,the uncertain identification problem is transformed into a deterministic optimization problem using the interval possibility degrees transformation model.The particle swarm optimization (PSO)algo-rithm is used to realize the identification.Moreover,the PSO algorithm and interval optimization algorithm are combined to identify the second parameter type.The results indicate that the proposed method is a feasible and effective method for identifying two different types of parameters in the same system.Keywords :recoil mechanism;parameter identification;interval possibility degree;curve similarity;particle swarm optimization;uncertain optimization;neural network;interval optimization收稿日期:2019-08-13.网络出版日期:2021-03-02.基金项目:总装973(6132490102).作者简介:鲍丹,女,博士研究生;侯保林,男,教授,博士生导师.通信作者:侯保林,E-mail:houbl@.㊀㊀火炮反后坐装置安装在炮身和架体之间,用于提供弹性力和制动力控制后坐部分在火炮射击时的后坐运动,并使之复位[1-2]㊂在此过程中,反后坐装置减小了火炮架体在射击时的受力,还把射击时的全炮后坐运动变为可控的炮身后坐运动,并能自动复位㊂反后坐装置中的参数包括基本物理参数㊁结构参数和经验系数㊂一些参数基于实验或经验的系数不易准确选定,因而对这些参数进行辨识具有一定的实用价值㊂杜中华等[3]采用数值仿真的方法对某型反后坐装置的液压阻力以及密封件工作压强进行了分析;狄长春等[4]对反后坐装置后坐复进过程中复杂流场性质及结构场动态特性进行了数值仿真㊂此外,火炮反后坐随着机械系统呈现出高速化㊁大型化和复杂化的方向发展,常规研究手段已经无法准确描述系统中存在的大量不确定性参数㊂对于不确定参数的优化方法可分为3类:概率不确定性哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第42卷优化方法㊁非概率不确定性优化方法和概率-非概率混合不确定性优化方法㊂工程实际中,往往只能得到有限的样本数据,很难获得不确定参数的精确概率分布,所以概率不确定性优化方法在工程实际中存在局限性㊂相对于概率不确定性优化方法,非概率不确定性优化方法具有对数据要求低,计算简单等优点,越来越多的科研人员对此进行了研究㊂其中采用区间来描述事物的本质和特征的区间数理论方法被应用于非概率不确定性优化㊂文献[5-6]分别提出了基于区间分析的方法进行参数估计和结构辨识;姜潮[7]提出了基于区间的不确定性优化理论与算法;Jiang等[8]提出一种改进的区间可能度计算方法提高计算精度;赵抢抢等[9]利用区间序关系转换模型将区间不确定参数辨识问题转换成确定性优化问题,并结合差分进化算法实现了弹药协调器的参数辨识;王敏容等[10]以可靠性指标为约束条件,提出了一种基于区间模型的结构非概率稳健优化设计方法㊂当用区间数描述系统的不确定参数时,由于目标函数相对于每一个设计变量的取值构成一个区间,所以辨识问题无法通过传统的确定性辨识方法求解㊂针对存在区间不确定参数的优化问题,可以通过非线性区间优化的数学模型转化为确定性问题进行求解㊂本文为解决火炮后坐复进过程中反后坐装置的参数辨识问题,建立了火炮后坐复进过程的解析模型㊂为了提高辨识效率,同时建立了神经网络模型,并根据不确定参数的变化特性对相关性能参数进行了分类以及用区间数进行描述㊂针对在一次动作过程中可通过参数辨识的方法得到其确定值的第1类参数,利用区间可能度转换模型,将区间不确定性问题转换为确定性问题进行求解㊂以反映辨识结果与测试结果的相似程度的时间序列数据相似度作为优化目标,利用粒子群算法实现参数辨识㊂针对只能确定其变化区间的参数,利用粒子群算法结合区间优化方法优化其区间㊂1㊀火炮反后坐装置运动过程数学建模1.1㊀火炮复进机和制退机数学方程火炮在后坐运动结束后,后坐部分在复进机力作用下回到待发射位置㊂取后坐部分为受力体,后坐过程中的运动微分方程为[1]:m d u/d t=m(d2x)/(d t2)=F pt-F R(1)F pt=Fϕh+F f+F+F T-mg sinφ(2)式中:F pt为炮膛合力;F R为后坐阻力;Fϕh为制退机力;F f为复进机力;F为反后坐装置密封装置的摩擦力;F T为导轨的摩擦力;u为后坐部分后坐速度;x为后坐部分后坐位移;m为后坐部分质量;φ为火炮射角㊂其中,F f㊁Fϕh为:F f=A f P f0(V0/(V0-A f x))n(3)Fϕh=(K1ρ(A0-A p)3)/(2a x2)u2+(K2ρA fj3)/(2A12)u2(4)㊀㊀火炮复进过程中的运动微分方程为:m d u/d t=m(d2x)/(d t2)=F f-Fϕh-(F+F T+mg sinφ)(5)F f=A f P f0(V0/(V0-A f x))n(6)式中:A f为复进机活塞工作面积;P f0为复进机气体的初压力;V0为复进机气体的初体积;n为复进机气体非线性指数㊂后坐时,由于制退杆从制退机内抽出而加大了制退机内的空间体积,使之形成制退机非工作腔内的真空㊂复进时,在制退机非工作腔真空消失以前,总的复进液压阻力中不含有制退机复进液压阻力;当制退机非工作腔的真空消失之后,总的液压阻力包含制退机复进液压阻力㊂当0ɤ x<l p时,Fϕf=(K2ρA3fj)/(2a2f) u2(7)㊀㊀当l pɤ xɤlλ时,Fϕf=(K2ρA3fj)/(2a2f) u2+(K1ρ(A of-a c)2)/(2(a x+a c)2) u2(8)式中:l p为制退机非工作腔真空消失点;lλ为最大后坐行程; x为以最大后坐点为起点的复进行程; u为复进速度;ρ为液体密度;K1为主流液压阻力系数;K2为支流液压阻力系数;A fj复进节制器活塞工作面积;A of 为复进时制退活塞工作面积;a f为复进节制器流液孔面积;a x为制退机流液孔面积,是 x的函数;a c为2条纵向沟槽的截面积;文中的目标函数函数是通过数学模型所得的P1腔室的仿真压力曲线与测试压力曲线之间的相似度㊂在发射试验中,后坐部分进行后坐复进运动,同时测得的P1腔室的压力曲线㊂图1为制退机结构及压力测试腔示意图㊂P1为:P1=(K1ρ(A o-A p)2)/(2a2x)u2(9)式中:P1为制退机P1腔室的压力;A o为制退杆活塞的工作面积;A p为节制环孔面积㊂图1㊀制退机结构及压力测试腔示意Fig.1㊀Recoil brake structure and pressure test chamber figure1.2㊀火炮反后坐装置待辨识参数分类由1.1节可知,火炮反后坐装置系统包含参数众多㊂待辨识的参数有3个,分别是复进机气体初压P f0㊁复进机气体非线性指数n和制退机主流液压阻力系数K1㊂根据3个参数在发射过程中的变化特性分为2类㊂第1类参数是难以通过测量的方法㊃886㊃第5期鲍丹,等:某火炮反后坐装置区间不确定参数辨识获得,在动作过程中可近似看作确定的,可通过辨识的方法获得,即复进机气体初压P f 0㊂P f 0是复进机的基本参数,由于密封装置的泄露,结构尺寸误差等各方面原因,使得在发射过程中很难测得其准确值㊂本文根据在经验值的基础上适当增大范围的原则确定P f 0的初始区间㊂第2类参数是区间不确定参数,无法确定其准确的分布规律,只能确定其变化的区间㊂对于火炮反后坐装置而言,2个区间不确定的参数分别为:复进机气体非线性指数n 和制退机主流液压阻力系数K 1㊂复进机气体非线性指数n 取决于复进机的散热条件和活塞运动速度㊂制退机液压阻力系数是反映制退机内液体真实流动因素的符合系数,这些因素有液体流动的沿程损失㊁流动的局部损失㊁流液孔处液流截面的收缩㊁液体可压缩性和流动的非定常流动等㊂本文在经验区间的基础上适当增大区间范围的原则确定K 1和n 的初始区间,如表1所示㊂表1㊀待辨识参数初始区间Table 1㊀Initial intervals of parameters to be identified参数名称初始区间复进机气体初压/MPa [4.08,7.80]复进机气体非线性指数[1.04,1.86]主流液压阻力系数[1.20,2.00]1.3㊀神经网络模型的建立火炮后坐复进过程是复杂的运动过程,而辨识过程需要大量的循环计算,为了提高辨识效率,利用前述数学模型,建立神经网络模型㊂反向传播神经网络(BP 神经网络)是一种多层前向反馈神经神经网络,具有强大的自适应㊁泛化和非线性逼近能力㊂BP 神经网络通常采用梯度下降搜索算法,不断调整网络权值和阈值,使得网络的输出值与实际输出值的均方误差最小㊂文章在3个待辨识参数的初始区间进行拉丁超立法抽样1000组,代入数学模型,得到1000组P 1腔压力曲线,并计算1000组仿真曲线与测试压力曲线的曲线相似度㊂以3个变量为输入,曲线相似度为输出,建立神经网络的1000组样本,神经网络模型结构如图2所示㊂图2㊀神经网络模型的结构Fig.2㊀The structure of neural network model2㊀参数辨识问题的描述及求解方法2.1㊀参数辨识问题描述整个参数辨识过程分为2个步骤㊂1)对第1类参数的辨识可利用寻优的方法求解,即在主流液压阻力系数K 1和复进机气体非线性指数n 在初始区间范围内变化的情况下,寻找出最优的复进机气体初压P f 0,使得辨识结果与测试结果的时间序列数据相似度区间的可能度最大㊂其数学模型为:max XP (f I (X ,D )ȡV I )D =(d 1,d 2, ,d l ),d k =[d L k ,d Rk ]{(10)式中:X =P f 0为设计变量,D =(K 1,n )为不确定变量,由于D 的取值为一区间数,因此对于任何一个确定的设计变量X ,相似度f I (X i ,D )的取值构成一个区间数,且均在区间[0,1]㊂将相似度区间转换成区间可能度P (f I (X i ,D )ȡV I ),V I 为性能区间,求解式后,可以得到一个最优设计向量X ∗,使得目标函数的可能度取最大值P max =P (f I (X ∗,D )ȡV I )㊂传统的确定性优化方法中,决策的判定都是基于目标函数在各个设计向量处的具体数值㊂针对此类目标函数为区间的参数辨识问题,本文提出了一种基于区间可能度数学转换模型将区间不确定优化问题转换为确定性问题的方法,再结合粒子群算法进行辨识㊂2)在辨识出第1类参数的基础上,对第2类参数的区间进行优化㊂每一组(K 1,n )对应一个相似度值f (K 1,n ),如图3所示㊂图3㊀参数值与相似度值对应关系Fig.3㊀Correspondence between parameters and similarityvalues需要找到待辨识参数制退机的主流液压阻力系数K 1和复进机气体非线性指数n 的最大区间,使得该区间内所有的相似度值均大于μ㊂其数学模型为:㊃986㊃哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第42卷㊀max L ij ңrk (x ,y )=(x r -x i )2+(y k -y j )2F ij ңrk =min(A I ij ңrk (x ,y ))ȡμx =(x 1,x 2, x m ),x r ȡx i y =(y 1,y 2, ,y l ),y k ȡy jìîíïïïïïï(11)式中:x =k ;y =n ;A ij ңrk 为相似度矩阵;A I ij ңrk 为相似度矩阵的区间;F ij ңrk 为相似度矩阵区间的最小值;L ij ңrk 为相似度矩阵的长度㊂A ij ңrk =f ij f (i +1)j f rj f i (j +1)f (i +1)(j +1) f r (j +1)︙︙︙f ik f (i +1)k f rk éëêêêêêùûúúúúú(12)A I ij ңrk =[min(A ij ңrk )max(A ij ңrk )](13)㊀㊀针对此类区间优化问题,本文采用式(11)的数学模型结合粒子群算法进行优化㊂2.2㊀时间序列相似度计算本文采用离散序列的一致性度量方法,即动态时间规整(DTW)计算仿真曲线与测试曲线的相似度来评价辨识结果㊂试验所得的压力数据序列长度与仿真所得的压力数据序列长度不一致,并且2组数据序列的时间轴无法完全对齐,所以一般的欧氏距离法存在不足㊂DTW 方法用满足一定条件的时间规整函数描述两者之间的时间对应关系,它允许时间轴上的漂移㊂将DTW 距离进行归一化处理,所得的值即为2组时间序列数据之间的相似度[11-13]㊂动态时间规划的具体步骤为:1)假设2组时间序列分别为n 维和m 维,构造一个n ˑm 的矩阵,用于存放两序列点对点之间的距离(一般可采用欧氏距离),距离越小表示两点之间的相似度越高㊂2)把矩阵看成一个网格,算法的目的为找到一条通过此矩阵网格的最有路径,改路径通过的网格点即为两组时间序列经过对齐后的点对;3)DTW 算法定义一个归整路径距离,找到最优路径后,将所有相似点之间距离和进行归一化处理,来衡量2组时间序列之间的相似性㊂2.3㊀区间可能度转换模型根据区间数学,区间数被定义为一对有序的实数[14]:㊀A I =[A L ,A R ]={x A L ɤx ɤA R ,x ɪR }(14)式中上标I ㊁L ㊁R 分别表示区间㊁区间下界和区间上界㊂区间的宽度定义为:L (A I )=A R -A L (15)㊀㊀区间可能度方法是基于模糊集来构造区间可能度,是一种定量比较区间之间的优劣程度[15]㊂将区间B 视为文章辨识的性能区间,则区间A 与区间B 的位置关系如图4所示㊂图4㊀区间A I 和B I 的3种位置关系Fig.4㊀Three kinds of positional relationships between interval A I and B I㊀㊀记P (A I ȡB I )为区间A I ȡB I 的可能度㊂本文采用了2种不同区间可能度的构造方法:构造方法(Ⅰ):P (A I ȡB I )=max[0,L (A I )+L (B I )-㊀max(0,B R -A L )](L (A I )+L (B I ))-1(16)㊀㊀构造方法(Ⅱ):P (A I ȡB I)=1,A L ȡB L12(A R -B L )2L (A I )L (B I),A L <B L <A R 0,A R ɤB Lìîíïïïï(17)2.4㊀粒子群算法本文对2类参数的辨识均采用了粒子群算法[16-18],该算法是智能优化算法的一种,有着精度高㊁收敛快的特点㊂粒子群算法优化的原理是通过不断更新粒子速度和位置,并计算其适应度值,直到适应度值符合要求为止㊂粒子群算法的流程如图5所示㊂图5㊀粒子群优化算法的流程Fig.5㊀The process of particle swarm optimization algo-rithm㊃096㊃第5期鲍丹,等:某火炮反后坐装置区间不确定参数辨识㊀㊀根据2类参数的不同辨识要求,设置粒子群算法的参数,包括种群规模,最大迭代次数㊁学习因子㊁适应度函数以及粒子位置更新准则㊂3㊀火炮发射试验与辨识结果分析3.1㊀火炮发射试验文中目标函数是通过数学解析模型所得的仿真曲线与试验曲线之间的相似度㊂测试曲线是在火炮发射试验过程中,测得的P 1腔室的压力曲线㊂图6为试验过程示意图,图7为测得的压力曲线㊂图6㊀发射试验Fig.6㊀The launchtest图7㊀P 1腔室的压力测试曲线Fig.7㊀The pressure test curves of P 1cavity3.2㊀辨识结果分析3.2.1㊀第1类参数辨识过程及结果设置粒子群智能算法的相关参数:种群规模为100;最大迭代次数为50;适应度函数即为区间可能度;学习因子c 1=0.5,c 2=0.5;更新权重w =0.8㊂粒子速度及位置更新准则为:v id (k +1)=wv id (k )+c 1r 1(p id -x id (k ))+c 2r 2(p gd -x id (k ))(18)x id (k +1)=x id (k +1)+v id (k +1)(19)式中:k 是迭代次数;r 1㊁r 2均为[-1,1]的均匀随机数;p id ㊁p gd 分别为个体最优值和全局最优值㊂分别采用2种区间可能度的构造方法对第1类参数进行辨识,性能区间V I 为[0.8,1.0]㊂当采用第1种可能度构造方法时,可得复进机气体初压P f 0的最优值为7.5882MPa,所用时间为6.708s;当采用第2种区间可能度构造方法时,可得复进机气体初压P f 0的最优值为7.3420MPa,所用时间为6.563s㊂然后,K 1和n 在初始区间采样,分别同2种可能度构造法下得到的复进机气体初压P f 0最优值代入模型,可得P 1腔室压力曲线簇与测试曲线的对比,即如图8和图9所示㊂分别采用2种区间可能度的构造方法辨识出复进机气体初压值㊂由图8和图9可得,采用第2种可能度构造方法得到的复进机气体初压值代入神经网络模型,得到的P 1腔室压力曲线簇更加稳定,且与测试曲线的整体相似度更高㊂因此,复进机气体初压P f 0的最优值取7.3420MPa㊂以此为基础,进行第2类参数的区间优化㊂图8中,该结果是在采用第1种可能度构造法的情况下获得㊂黑色曲线为测试曲线,其他不同颜色曲线为K 1和n 在不同采样样本下得到的辨识曲线㊂图9中,该结果是在采用第2种可能度构造法的情况下获得㊂黑色曲线为测试曲线,其他不同颜色曲线为K 1和n 在不同采样样本下得到的辨识曲线㊂图8㊀辨识曲线簇与测试曲线的对比ⅠFig.8㊀Comparison between identification curve clusterand test curve (Ⅰ)图9㊀辨识曲线簇与测试曲线的对比ⅡFig.9㊀Comparison between identification curve clusterand test curve (Ⅱ)3.2.2㊀第2类参数辨识过程及结果设置粒子群智能算法的相关参数:种群规模为100;最大迭代次数为200;c 1=1.2,c 2=1.3;适应度函数为L ij ңrk (x ,y )=(x r -x i )2+(y k -y j )2;速度位置更新准则如式(18)和式(19)㊂μ分别取0.50㊁0.80㊁0.95进行优化,得到如表2结果㊂㊃196㊃哈㊀尔㊀滨㊀工㊀程㊀大㊀学㊀学㊀报第42卷为验证该算法的优化精度,当μ取0.50时,参数K1和n在优化后所得区间内随机采样1000组,代入数学模型中,得到P1腔室压力曲线簇,并计算相似度,得到相似度在优化后相似度区间范围内的概率为97.4%㊂同理,当μ分别取0.80㊁0.95时,参数K1和n在优化后所得区间内随机采样1000组,带入数学模型中,并计算P1腔室压力曲线簇的相似度,可得相似度值在优化后相似度区间内的概率分别为97.2%和98.0%㊂3种情况相似度均较高,可得本文的算法具有较高的优化精度㊂表2㊀第2类参数辨识结果Table2㊀The second kind of parameter identification re-sultsμ参数K区间参数n区间相似度区间0.50[1.489,2.000][1.045,1.826][0.500,0.922] 0.80[1.783,1.788][1.083,1.801][0.800,0.883] 0.95 1.621[1.530,1.767][0.950,0.985] 4㊀结论1)为了辨识火炮反后坐装置不确定性参数,文章建立了火炮发射过程中,反后坐装置的数学解析模型,并为提高辨识效率,建立神经网络模型㊂为了得到P1腔室的压力曲线作为辨识过程中的目标曲线,进行了火炮发射试验㊂2)火炮复进机的气体初压属于第1类参数,针对此类不确定参数,利用区间可能度数学转换模型,将区间不确定优化问题转化为确定性优化问题进行求解㊂以测试曲线和数值仿真曲线的时间序列数据相似度作为优化目标,利用粒子群算法实现参数辨识㊂3)火炮制退机的主流液压阻力系数和复进机的非线性指数属于第2类参数㊂针对此类无法确定其准确的分布规律,只能确定其变化的区间,文章提出了一种基于粒子群算法结合区间优化算法优化其区间范围㊂辨识结果表明文章提出的同时针对2种不同类型参数的辨识方法具有可行性和有效性㊂参考文献:[1]高跃飞.火炮反后坐装置设计[M].北京:国防工业出版社,2010.GAO Yuefei.Artillery recoil mechanism design[M].Bei-jing:National Defense Industry Press,2010. [2]张相炎,郑建国,袁人枢.火炮设计理论[M].北京:北京理工大学出版社,2014.ZHANG Xiangyan,ZHENG Jianguo,YUAN Renshu.The-ory of artillery gun design[M].Beijing:Beijing Institute of Technology Press,2014.[3]杜中华,吴向东,黄涛.火炮反后坐装置密封件工作压强数值仿真[J].机械工程师,2014(7):141-144.DU Zhonghua,WU Xiangdong,HUANG Tao.Work pres-sures numerical simulation of gun recoi equipment seal parts [J].Mechanical engineer,2014(7):141-144. [4]狄长春,顾赵强,杨玉良.可压缩液体反后坐装置液压阻力仿真研究[J].计算机仿真,2017,34(8):6-9, 178.DI Changchun,GU Zhaoqiang,YANG Yuliang.Simulation research of hydraulic resistance on compressible liquid re-coil mechanism[J].Computer simulation,2017,34(8): 6-9,178.[5]REYNET O,JAULIN L.A new interval-based method to characterize estimability[J].International journal of adap-tive control and signal processing,2011,25(3):288-294.[6]LAGRANGE S,DELANOUE N,JAULIN L.Injectivity a-nalysis using interval analysis:application to structural identifiability[J].Automatica,2008,44(11):2959-2962.[7]姜潮.基于区间的不确定性优化理论与算法[D].长沙:湖南大学,2008.JIANG Chao.Theories and algorithms of uncertain optimi-zation based on interval[D].Changsha:Hunan University, 2008.[8]JIANG C,HAN X,LIU G R.Optimization of structures with uncertain constraints based on convex model and satis-faction degree of interval[J].Computer methods in applied mechanics and engineering,2007,196(49/50/51/52): 4791-4800.[9]赵抢抢,侯保林.火炮弹药协调器区间不确定参数辨识[J].兵工学报,2017,38(1):35-42.ZHAO Qiangqiang,HOU Baolin.Identification of interval uncertainty parameters of a howitzer shell transfer arm[J]. Acta armamentarii,2017,38(1):35-42. [10]王敏容,樊建平,陈旭勇.基于区间模型的结构非概率稳健优化设计[J].固体力学学报,2014,35(6): 583-589.WANG Minrong,FAN Jianping,CHEN Xuyong.Non-probabilistic robust optimization design of structures based on interval model[J].Chinese journal of solid mechanics, 2014,35(6):583-589.[11]肖瑞,刘国华.基于趋势的时间序列相似性度量和聚类研究[J].计算机应用研究,2014,31(9):2600-2605.XIAO Rui,LIU Guohua.Research on trend-based time series similarity measure and cluster[J].Application re-search of computers,2014,31(9):2600-2605. [12]李中,刘洋洋,张铁峰.基于形态相似距离的时间序列相似度计算[J].计算机工程与设计,2016,37(3): 679-683.LI Zhong,LIU Yangyang,ZHANG Tiefeng.Time series similarity measurement based on morphology similarity dis-tance[J].Computer engineering and design,2016,37(3):679-683.㊃296㊃第5期鲍丹,等:某火炮反后坐装置区间不确定参数辨识[13]刘芬,郭躬德.基于区间相似度的模糊时间序列预测算法[J].计算机应用,2013,33(11):3052-3056.LIU Fen,GUO Gongde.Interval-similarity based fuzzy time series forecasting algorithm[J].Journal of computer applications,2013,33(11):3052-3056. [14]胡启洲,张卫华.区间数理论的研究及其应用[M].北京:科学出版社,2010.HU Qizhou,ZHANG Weihua.Study and application of in-terval number theory[M].Beijing:Science Press,2010.[15]姜潮,韩旭,谢慧超.区间不确定性优化设计理论与方法[M].北京:科学出版社,2017.JIANG Chao,HAN Xu,XIE Huichao.Interval uncertain optimization design:theory and methods[M].Beijing: Science Press,2017.[16]薛文,苏宏升.基于分群策略的混沌粒子群优化算法[J].计算机工程与设计,2019,40(2):443-448.XUE Wen,SU Hongsheng.Chaotic particle swarm optimi-zation algorithm based on grouping strategy[J].Computer engineering and design,2019,40(2):443-448. [17]周利军,彭卫,邹芳,等.自适应变异粒子群算法[J].计算机工程与应用,2016,52(7):50-55,149.ZHOU Lijun,PENG Wei,ZOU Fang,et al.Particle swarm optimization based on self-adaptive mutation[J].Computer engineering and applications,2016,52(7): 50-55,149.[18]EBERHART R C,SHI parison between ge-netic algorithms and particle swarm optimization[C]//Proceedings of the7th International Conference on Evolu-tionary Programming VII.San Diego,California,USA: Springer,1998:611-616.本文引用格式:鲍丹,赵抢抢,侯保林.某火炮反后坐装置区间不确定参数辨识[J].哈尔滨工程大学学报,2021,42(5):687-693.BAO Dan,ZHAO Qiangqiang,HOU Baolin.Identification of uncertain interval parameters of cannon recoil mechanism[J].Journal of Harbin Engineer-ing University,2021,42(5):687-693.㊃396㊃。
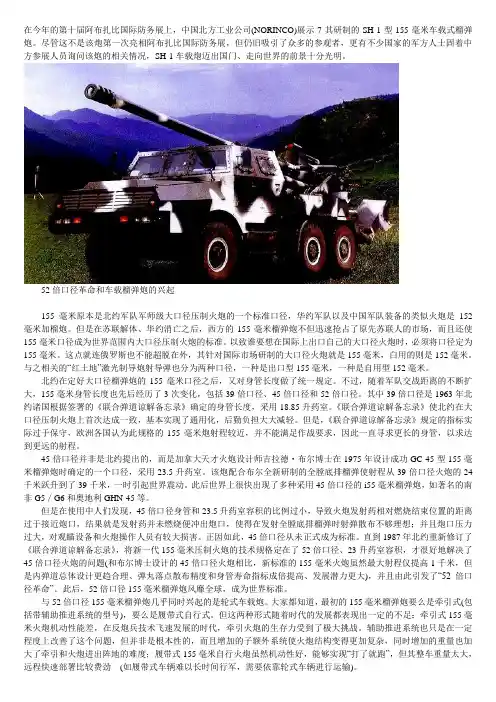
在今年的第十届阿布扎比国际防务展上,中国北方工业公司(NORINCO)展示7其研制的SH-1型155毫米车载式榴弹炮。
尽管这不是该炮第一次亮相阿布扎比国际防务展,但仍旧吸引了众多的参观者,更有不少国家的军方人士固着中方参展人员询问该炮的相关情况,SH-1车载炮迈出国门、走向世界的前景十分光明。
52倍口径革命和车载榴弹炮的兴起155毫米原本是北约军队军师级大口径压制火炮的一个标准口径,华约军队以及中国军队装备的类似火炮是152毫米加榴炮。
但是在苏联解体、华约消亡之后,西方的155毫米榴弹炮不但迅速抢占了原先苏联人的市场,而且还使155毫米口径成为世界范围内大口径压制火炮的标准。
以致谁要想在国际上出口自己的大口径火炮时,必须将口径定为155毫米。
这点就连俄罗斯也不能超脱在外,其针对国际市场研制的大口径火炮就是155毫米,白用的则是152毫米。
与之相关的“红土地”激光制导炮射导弹也分为两种口径,一种是出口型155毫米,一种是自用型152毫米。
北约在定好大口径榴弹炮的155毫米口径之后,又对身管长度做了统一规定。
不过,随着军队交战距离的不断扩大,155毫米身管长度也先后经历了3次变化,包括39倍口径、45倍口径和52倍口径。
其中39倍口径是1963年北约诸国根据签署的《联合弹道谅解备忘录》确定的身管长度,采用18.85升药室。
《联合弹道谅解备忘录》使北约在大口径压制火炮上首次达成一致,基本实现了通用化,后勤负担大大减轻。
但是,《联合弹道谅解备忘录》规定的指标实际过于保守,欧洲各国认为此规格的155毫米炮射程较近,并不能满足作战要求,因此一直寻求更长的身管,以求达到更远的射程。
45倍口径并非是北约提出的,而是加拿大天才火炮设计师吉拉德・布尔博士在1975年设计成功GC-45型155毫米榴弹炮时确定的一个口径,采用23.5升药室。
该炮配合布尔全新研制的全膛底排榴弹使射程从39倍口径火炮的24千米跃升到了39千米,一时引起世界震动。
火炮后坐阻力的区间不确定性优化研究李荣;杨国来;孙全兆;萧辉【摘要】为减小火炮炮架受力,获得更优后坐阻力规律,进行了后坐流液孔尺寸的区间不确定性优化研究.结合公差带定义了三参数区间,构建了基于三参数区间的不确定性优化模型及算法;以流液孔的几何尺寸为不确定性变量,利用上述方法对节制杆形状尺寸进行了区间优化设计;优化求解了不同公差等级的节制杆外径.研究结果表明:优化后的后坐阻力峰值区间更小,后坐阻力曲线更加平缓,充满度更好.实现了节制杆外径尺寸设计与公差设计的同步优化,得到了兼顾工艺性和后坐阻力的节制杆外径设计方案.%In order to reduce the force of artillery carriage and obtain the better recoil resistance,the optimization on interval uncertainty of recoil fluid-hole were conducted.The three-parameter interval was defined combining with tolerance,and then the uncertainty optimization model and algorithm based on three-parameter interval were established.Taking the dimension of fluid hole as the uncertainty variable,the interval optimization design of the shape size of control rod was carried out by using the method mentioned above.The outer diameter of the control rod with different tolerance-grades was optimized.Research results show that the peak interval of recoil resistance is reduced after the optimization,and the recoil resistance curve is more gentler with a better fullness.The synchronous optimization of the tolerance design and the design of the outer diameter of control rod was realized.The optimum design-scheme of the outer diameter of the control rod considering the workmanship and the recoil resistance was obtained.【期刊名称】《弹道学报》【年(卷),期】2017(029)002【总页数】7页(P78-84)【关键词】火炮;后坐阻力;结构设计;区间优化;尺寸不确定性【作者】李荣;杨国来;孙全兆;萧辉【作者单位】南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094;南京理工大学机械工程学院,江苏南京210094【正文语种】中文【中图分类】TJ303通过设计火炮反后坐装置的制退机液压阻力可得到后坐阻力的规律,它极大地减小了火炮炮架受力。

火炮动力后坐试验台波形发生器优化设计研究杨玉良;秦俊奇;狄长春;崔凯波【摘要】针对火炮动力后坐试验台波形发生器设计问题,基于ABAQUS建立火炮动力后坐试验台有限元模型;通过橡胶试验,选Arruda-Boyce模型作为波形发生器材料本构模型;以火炮模拟试验与实弹射击时后坐动态特性的平均相对误差为试验指标值,基于正交设计法建立初始样本数据,采用QPSO-LS-SVM算法对波形发生器进行优化设计。
该研究将为我军火炮动力后坐试验台的设计研制提供理论参考。
%For the design of waveform generator of a gun-power-recoil test machine,a finite element model of the test machine was built based on ABAQUS.According to the results of rubber tests,the Arruda-Boyce model was selected as a material constitution model for the waveform generator.Taking the average relative error of recoil dynamic properties between the results of simulation test and live firing as a design objective,the initial sample data were acquired based on orthogonal design method,and the QPSO-LS-SVM algorithm was applied to optimize the design of waveform generator. The conclusion will provide a theoretical reference to the design of gun-power-recoil test machine.【期刊名称】《振动与冲击》【年(卷),期】2014(000)002【总页数】5页(P47-51)【关键词】火炮动力后坐;波形发生器;超弹性模型;正交设计法;QPSO-LS-SVM【作者】杨玉良;秦俊奇;狄长春;崔凯波【作者单位】军械工程学院火炮工程系,石家庄 050003;军械工程学院火炮工程系,石家庄 050003;军械工程学院火炮工程系,石家庄 050003;军械工程学院火炮工程系,石家庄 050003【正文语种】中文【中图分类】TJ306+.1足够的实弹射击试验可检验火炮装备的可靠性、可用性、维修性及耐久性。
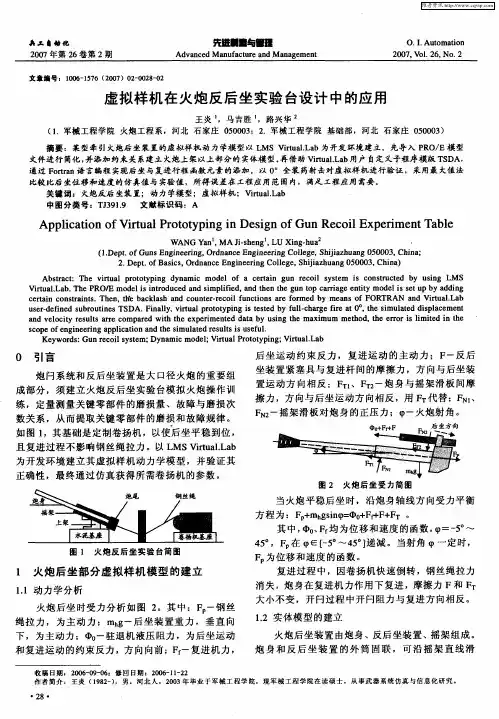
虚拟样机在火炮反后坐实验台设计中的应用
王炎;马吉胜;路兴华
【期刊名称】《兵工自动化》
【年(卷),期】2007(26)2
【摘 要】某型牵引火炮后坐装置的虚拟样机动力学模型以LMS Virtual.Lab为开
发环境建立.先导入PRO/E模型文件进行简化,并添加约束关系建立火炮上架以上
部分的实体模型.再借助Virtual.Lab用户自定义子程序模版TSDA,通过Fortran语
言编程实现后坐与复进行程函数元素的添加.以0°全装药射击对虚拟样机进行验证,
采用最大值法比较比后坐位移和速度的仿真值与实验值,所得误差在工程应用范围
内,满足工程应用需要.
【总页数】3页(P28-29,41)
【作 者】王炎;马吉胜;路兴华
【作者单位】军械工程学院,火炮工程系,河北,石家庄,050003;军械工程学院,火炮工
程系,河北,石家庄,050003;军械工程学院,基础部,河北,石家庄,050003
【正文语种】中 文
【中图分类】TJ391.9
【相关文献】
1.火炮身管-反后坐装置集成优化设计方法研究 [J], 洪亚军;曹岩枫;尹强;徐诚
2.基于HLA的反后坐装置虚拟样机设计 [J], 彭金伟;温波
3.火炮反后坐装置结构参数化设计研究 [J], 朱铭君;刘树华;曹广群
4.基于虚拟样机技术的火炮反后坐装置设计评价研究 [J], 贾长治;胡仁喜;杜秀菊;
陶辰立
5.基于虚拟样机的火炮反后坐装置性能仿真和定量化评估研究 [J], 贾长治;胡仁喜;
刘海平
因版权原因,仅展示原文概要,查看原文内容请购买
火炮动态后坐装置有限元分析与优化
陈永才;丁源;赵建新;吴松
【期刊名称】《军械工程学院学报》
【年(卷),期】2004(016)002
【摘要】活塞缸是火炮动态后坐装置中的关键部件,其结构强度设计是整个实验装置强度设计的核心.利用I-DEAS软件,在对其进行实体建模和有限元网格划分的基础上,计算了活塞缸整体的应力应变值,得到了活塞缸工作时的应力应变图,并对其结构中应力状况恶劣的部位进行了结构优化.
【总页数】4页(P11-14)
【作者】陈永才;丁源;赵建新;吴松
【作者单位】军械工程学院火炮工程系,河北,石家庄,050003;73905部队,江苏,徐州,221004;军械工程学院火炮工程系,河北,石家庄,050003;军械工程学院火炮工程系,河北,石家庄,050003
【正文语种】中文
【中图分类】TJ303.4;O242.21
【相关文献】
1.火炮身管-反后坐装置集成优化设计方法研究 [J], 洪亚军;曹岩枫;尹强;徐诚
2.基于遗传算法的火炮反后坐装置结构多目标优化研究 [J], 周乐;杨国来;葛建立;王飞
3.基于图像匹配技术的火炮反后坐装置动态测试方法 [J], 欧克寅;傅建平;张培林
4.某迫榴式火炮反后坐装置的结构优化及分析 [J], 宋焦;何永;赵威;陶齐冈
5.基于ABAQUS的火炮试验装置后坐动态特性研究 [J], 杨玉良;狄长春;秦俊奇;刘林
因版权原因,仅展示原文概要,查看原文内容请购买。
电磁轨道炮后坐诸元与反后坐装置设计邱群先,马新科,何 行,高 博(中国船舶重工集团公司第七一三研究所,河南 郑州 450015)摘要: 电磁轨道炮发射电磁炮弹时会对后坐部分产生电磁反作用力。
电磁反作用力的存在会使后坐部分后坐。
电磁轨道炮的后坐过程可分为2个运动时期。
自由后坐运动时期可得出后坐部分的最大后坐速度和初始后坐行程。
惯性运动时期得到的最大后坐运动行程是合理设计反后坐装置的直接依据。
依据后坐微分方程对反后坐装置进行了设计研究,给出了0°和60°射角时反后坐装置的设计结果。
对电磁轨道炮反后坐装置研究具有一定的参考价值。
关键词:电磁轨道炮;后坐诸元;反后坐装置中图分类号:TJ391 文献标识码:A文章编号: 1672 – 7649(2019)02 – 0150 – 04 doi:10.3404/j.issn.1672 – 7649.2019.02.030Research on recoil data and anti-recoil mechanism design of electromagnetic railgunQIU Qun-xian, MA Xin-ke, HE Hang, GAO Bo(The 713 Research Institute of CSIC, Zhengzhou 450015, China)Abstract: Anti-electromagnetic-force is produced while projectile is launched in electromagnetic railgun. The existing force will make the recoil assemble move along the opposite direction of projectile. The recoil process can be regarded as two movement periods. Maximum velocity and original recoil displacement can be calculated from free recoil movement period. The maximum recoil displacement obtained from inertia recoil movement period is the direct basis to design the anti-recoil mechanism. According to the recoil differential equation, the results of 0° and 60° elevation were calculated. The re-search has some reference significance to study anti-recoil mechanism.Key words: electromagnetic railgun;recoil data;anti-recoil mechanism0 引 言近年来,美国海军主导的新概念武器——舰载电磁轨道炮项目吸引了全世界的目光。
基于正交试验的火炮动力后坐模拟装置冲击参数设计研究摘要:根据火炮后坐的受力分析和动作过程,基于ADAMS软件建立了冲击头撞击炮口模拟火炮后坐的仿真模型,采用冲击质量、冲击速度、接触刚度及阻尼系数为试验设计影响因素,以模拟试验与实弹射击时火炮最大后坐速度和最大后坐位移的平均相对误差为试验指标,开展正交试验设计,并对正交试验设计结果进行方差分析,得到了较优的冲击参数优化组合,平均相对误差仅为0.6534%,该研究为模拟试验装置的应用奠定了基础。
Abstract:According to the gun power recoil force analysis and action process,gun recoil simulation model by the impact head hitting the muzzle based on the ADAMS software is established. Using the impact mass,impact velocity,contact stiffness and damping coefficients as the influencing factors of experimental design,and using the average relative error of the maximum recoil velocity and the maximal recoil displacement by comparing simulation test and real bullets as the test index,it is to carry out the orthogonal experimental design,and take a variance analysis of orthogonal test design results,which has obtained better impact parameteroptimization whose average relative error is only 0.6534%. The study lays a foundation for application of the simulation test device.关键词:火炮;动力后坐模拟;正交试验设计;方差分析Key words:gun;power recoil simulation;orthogonal test design;variance analysis中图分类号:TJ306 文献标识码:A 文章编号:1006-4311(2016)13-0174-030 引言通过冲击头撞击炮口,以冲击力代替炮膛合力模拟火炮后坐是一种技术上可行的动力后坐模拟新方法,在这种方法模拟过程中,如何对试验影响因素进行参数设计,从而保证模拟射击与实弹射击的等效性,是该试验方法的核心要点。
”巨炮”如何消除后坐力?一、减轻后坐力的目的和意义:后坐力是指火炮或火箭发射器等武器射击时,反冲力作用在炮身上产生的一种力。
后坐力不仅对射击准确性有影响,还会对使用者造成较大的身体伤害。
因此,减轻后坐力的措施十分重要。
二、利用炮身设计减轻后坐力:合理的炮身设计可以降低后坐力,从而提高武器的射击稳定性。
在设计炮身时,可以采用以下措施:1. 使用多种材质组合:通过在炮身中采用不同材质的层次结构,可以降低后坐力对炮身的影响,提高炮身的强度和稳定性。
2. 采用减震结构:在炮身的设计中加入减震装置,可以有效地减轻后坐力对使用者的冲击,并降低炮身受力。
3. 优化炮身重量分布:通过调整炮身的重量分布,使其更加均匀,可以减轻后坐力对使用者身体的冲击,提高射击的稳定性。
三、使用减震装置减轻后坐力:减震装置是一种常见的减轻后坐力的工具,它可以通过吸收和分散后坐力来保护使用者。
常见的减震装置包括:1. 后坐补偿器:后坐补偿器可以通过排气口将一部分射击时产生的气体垂直排放,从而减少后坐力对使用者的影响。
它能够有效降低后坐力,提高射击的稳定性。
2. 后坐减振器:后坐减振器是一种通过减震技术来降低后坐力的装置。
它通过使用弹簧、减震器等装置来分散后坐力的冲击力,从而保护使用者的身体和武器。
3. 阻尼材料:使用阻尼材料可以有效地吸收后坐力的能量,从而减轻后坐力对使用者的影响。
常见的阻尼材料包括橡胶、减震材料等。
四、采用射击姿势减轻后坐力:合理的射击姿势也可以减轻后坐力的影响,提高射击的准确性。
在使用巨炮时,可以采用以下射击姿势:1. 稳定支撑:在射击时,保持身体和武器的稳定,可以减轻后坐力对身体的冲击。
可以利用支撑点,如枪托、肩膀等,来分担后坐力产生的力量。
2. 紧贴枪托:在射击时,紧贴枪托可以减少后坐力对使用者手臂和肩膀的影响。
通过将身体尽可能靠近枪托,可以减少后坐力对身体的冲击。
五、结语:通过合理的炮身设计、使用减震装置、采用射击姿势等措施,可以有效地减轻巨炮的后坐力。
一种基于能量转化的新型反后坐装置原理作者:彭京徽刁诗靖来源:《科技信息·下旬刊》2018年第02期摘要:根据能量转化的原理,探讨了一种将后作用能量转化为动能以降低后作用力的火炮新型反后坐装置原理。
本文介绍了应用能量转化的新型反后坐装置结构原理与系统设计,并对相关技术进行了分析和研究。
关键词:火炮;反后坐装置;能量转化;系统设计引言反后坐装置是现代火炮必不可少的关键部件之一,其性能的好坏制约着火炮系统的整体性能。
它的设计解决了火炮威力与火炮机动性之间的矛盾,也实现了刚性炮架向弹性炮架的转变。
传统火炮的反后坐装置多采用弹性储能装置在后坐终了时使炮身复进到射前位置的复进机和产生一定规律阻力来降低火药燃气的炮膛合力的制退机的组合结构。
这种设计的原理是以直接的力抵消力的方式,力的作用方向依然近似是沿着炮膛轴线,对火炮的整体稳定性和射击精度存在一定的影响。
基于能量转化的新型反后坐装置的设计原理是将火炮燃气的后作用力利用连杆机构传递给曲轴使其产生转动,从而实现内能向动能的转化,并采用合适的制停技术使其平稳安全停止转动并使后坐回到待发位置。
该设计相对于现有设计不仅复杂程度降低,同时要求也较低。
1新型装置的原理与结构设计传统火炮反后坐装置主要有弹簧或气体来储存能量和利用液体或气体产生后坐阻力来消耗炮膛合力。
在火炮反后坐装置中采用能量转化的设计,可以用将燃气后坐能量以动能的形式进行输出,同时,利用合理的制停规律使后坐复位,并完成相应的一系列动作,包括:击发、收回击针、开锁、开闩、抽筒、抛筒、供弹、输弹、关闩和闭锁等。
从而在火炮设计中不再采用复进机和制退机的使用,减低复杂程度。
该新型设计装置主要由后坐连杆组、曲轴组和制停器组成。
1.1新型反后坐装置的结构原理火炮系统在工作时后坐部分在炮膛合力作用下向后运动,后坐运动结束后又在复进机力作用下向前运动到待发位置,因此对一个工作过程来说可以看成是一个往复运动。
同时,它的能量是火药的化学能转化为热能进而转化为动能的过程,这与内燃机的工作过程相似,新型基于能量转化的反后坐装置的结构如图1所示。
火炮反后坐装置优化设计
1. 任务要求
对现有的反后坐装置进行受力分析,建立动力学模型,运用相关软件实现模
型的界面化,最终实现对现有反后坐装置的优化,通过计算观察后坐和复进过程
中复进机力,液压阻力随时间和位移的变化过程,总结出变化的趋势,解释曲线
变化的原因,建立对反后坐装置优化的基础。
2. 设计过程
(1)
炮膛合力的计算模块
Simulink是一个针对动力学系统建模、仿真和分析的软件包,可以与matlab
实现无缝结合,能调用matlab的强大的函数库。
图1 炮膛合力计算
得炮膛合力与时间的曲线:
图2 炮膛合力曲线
(2)液流孔面积的计算
液流孔面积和节制杆直径有着直接的关系,有相关资料可以知道
22
4
xpx
add
(1)
其中dp——节制环内径;
dx——节制杆直径。
对于dx的计算,simulink提供了一个很好的办法,通过插值函数,进行插
值就可以得到,其在仿真中的作用很大。
图3 插值过程
其插值函数如下图:
图4 插值函数
(3)后坐仿真过程
力与位移之间的关系以及相关过程的建立过程。
图5 后坐积分反馈过程
图6 驻退机力与时间曲线
驻退机力随位移的变化很平坦,没有很大的变化,一开始由于炮膛合力较大,
使得加速度很大,驻退机力与速度有关,所以由于加速度很大,使得驻退机力很
短时间内就达到了最大值,然后由于加速的的减小,速度变小,等炮膛合力等于
零以后,速度下降,驻退机力也随之下降,最终等于零。
图7 复进机力与时间曲线
复进机力和后坐的位移有关,随着位移的增大,力的大小也在变化,当后坐
终了的时候,后坐位移最大,复进机力也就达到最大值。
图8 总阻力与位移曲线
(4)复进仿真过程
复进过程的仿真其实是和后坐过程的仿真是相似的。
图9 复进仿真过程
总位移曲线在很短时间内达到最大,是由于在刚开始的时候,由于复进机力
很大,阻力与速度有关系,阻力很小,主动力较大,使得加速度很大,在很短时
间内,速度就达到最大,速度变大,阻力增大,最终加速度变负,速度减小,阻
力减小,当到了真空消失点的时候,突然变大是由于有了驻退机液压阻力,但最
终还是由于速度减小,所以变小,最后到零。
图10 总阻力与位移曲线
图11 复进节制力与位移曲线
图12 驻退机液压阻力与位移曲线
(4)复进仿真过程
下面就对节制杆的尺寸进行重新选取,以达到优化反后坐装置的目的。
图13 节制杆直径
下面是反后坐装置调试后的力与位移曲线:
图14 总阻力曲线(后坐过程) 图15 驻退机液压阻力(后坐过程)
图16 复进机力曲线(后坐过程) 图17 总阻力曲线(复进过程)
通过比较调试前和调试后的力的最大值,后坐过程调试前的最大总阻力大小
为8.094E+4N,经过调试最终后坐过程的最大总阻力大小为7.88E+4N,可见调试
后的最大阻力大小有所减小,说明调试后的整体性能有所改善。通过数据比较可
以看出,后坐过程的整体受力有所改善,性能得到了提高。调试后的曲线比调试
前的变得平滑,说明调试后的在整体性能上要比调试前的好。同时复进过程到最
后的时候,受力效果比先前的好,使得机构的整体性能比调试前的好。
图6.6 驻退机力曲线(复进过程)