车载激光点云与面阵CCD影像数据融合技术研究
- 格式:pdf
- 大小:464.43 KB
- 文档页数:3
计算机测量与控制.2022.30(1) 犆狅犿狆狌狋犲狉犕犲犪狊狌狉犲犿犲狀狋牔犆狅狀狋狉狅犾 ·234 ·收稿日期:20211103; 修回日期:20211210。
基金项目:山西省回国留学人员科研资助项目(2017-091)。
作者简介:党亚南(1998),女,山西忻州人,硕士研究生,主要从事图像处理与计算成像方向的研究。
引用格式:党亚南,田照星,郭利强.车载激光雷达点云数据处理关键技术[J].计算机测量与控制,2022,30(1):234238,245.文章编号:16714598(2022)01023405 DOI:10.16526/j.cnki.11-4762/tp.2022.01.036 中图分类号:TN249文献标识码:A车载激光雷达点云数据处理关键技术党亚南,田照星,郭利强(中北大学信息与通信工程学院,太原 030051)摘要:激光雷达具有探测精度高、穿透能力强、能够三维成像等诸多优点,故自动驾驶车辆常常搭载激光雷达来对车身周围环境进行感知;车辆实现自动驾驶的关键技术包括车载激光雷达信号的发射、接收和对点云数据的处理,通过对接收到的点云数据进行处理可以使车辆准确的感知到当前路面状况并做出相应操作;文章重点介绍了车载激光雷达点云数据处理中的关键技术,对每个关键技术中常用算法的基本原理、优缺点和改进等进行了阐述,以期为车载激光雷达点云数据处理提供参考。
关键词:自动驾驶;激光雷达;点云数据;数据处理;目标识别犓犲狔犜犲犮犺狀狅犾狅犵狔狅犳犞犲犺犻犮犾犲犔犻犱犪狉犘狅犻狀狋犆犾狅狌犱犇犪狋犪犘狉狅犮犲狊狊犻狀犵DANGYanan,TIANZhaoxing,GUOLiqiang(SchoolofInformationandCommunicationEngineering,NorthUniversityofChina,Taiyuan 030051,China)犃犫狊狋狉犪犮狋:Lidarhasmanyadvantagessuchashighdetectionaccuracy,strongpenetratingability,andthree-di mensionalimagingcapability.Therefore,AutonomousvehicleareoftenequippedwithLidartoperceivethesurround ingenvironmentofthevehiclebody.ThekeytechnologiesofAutonomousvehicleincludetransmittingandreceivinglidarsignalandprocessingpointclouddata.thevehiclecanaccuratelyperceivethecurrentroadconditionsandmakecorrespondingoperations.Thispapermainlyintroducesthekeytechnologiesinpointclouddataprocessingofvehiclelidar,andexpoundsthebasicprinciples,advantagesanddisadvantagesandimprovementsofcommonalgorithmsineachkeytechnology.inordertoprovideareferenceforpointclouddataprocessingofvehicle-mountedlidar.犓犲狔狑狅狉犱狊:Autonomousdriving;Laserradar;Pointclouddata;Dataprocessing;Targetrecognition0 引言随着自动化技术与人工智能技术的相互融合快速发展,自动驾驶车辆应运而生,它可以减少因人为原因导致的交通事故,也可以为残疾人、行动不便老年人等提供开车的权力,人工智能合理的路径规划也可以节约驾驶时间。
车载激光点云技术在道路及交通设施管理上的研究与应用2:深圳高速工程顾问有限公司广东深圳摘要:车载激光点云技术在实际应用的过程中能够通过智能建模、云数据处理、地物自动提取等技术,对道路的模型以及道路周边交通设施信息进行收集,为道路与交通设施管理工作提供相应的数据支持。
关键词:车载激光点云技术;道路管理;交通设施管理引言:交通是社会发展过程中研究的重点工作,而伴随着我国的发展,我国也将更多的新技术应用于道路与交通设施管理工作中。
车载激光点云技术便是其中的重点发展技术之一。
本文将对车载激光点云技术在道路以及交通设施管理工作中的作用进行分析。
1.车载激光点云的研究内容交通质量是决定一个地区发展质量的重要因素,而伴随着时代的发展,人们对于交通质量的要求也在不断的提升。
在信息化时代的影响下,车载激光点云技术手段也应用于道路与交通设施管理工作中,为人们提供丰富的道路与交通设施信息与数据,极大程度的提升道路与交通设施的管理质量[1]。
现阶段,车载激光点云技术在应用的过程中主要研究以下几个方面的内容。
(一)智能建模首先,激光点云技术在应用的过程中需要获取激光点云与相机在同一时刻同一位置所获取的信息,之后,依靠所获取的信息,确定其所对应的像素以及空间位置等。
最后,将带有信息的点云数据进行处理,实现数据的可视化显示,自动分类以及智能建模等。
(二)云数据预处理在获取相关的信息后,对数据进行整理、转化、分析等,实现数据的分类,将目标的信息与其他的信息进行分组,提升信息的针对性。
(三)地物自动提取地物自动提取是激光点云技术所研究的重点工程。
其在应用的过程中能够对周边的信息进行准确的分析与判断,获取周边地区的建筑立面、线杆、指示灯等各种数据。
1.车载激光点云在道路及交通设施管理中的应用车载激光点云技术用于道路以及交通设施管理工作中的主要对周边的信息进行收集与处理,从而为我国的道路与交通设施管理提供一定的数据支持。
车载激光点云技术在应用的过程中主要是通过以下几个方面进行信息的收集与整理工作。
基于车载三维激光扫描的地形图数据采集的研究薛效斌;钱星;马宁【摘要】文章从三维激光扫描仪在测量中的作用入手,重点介绍了三维激光扫描技术在国内的应用现状,并与传统数据采集方式进行了比较.结合应用实例将三维激光扫描技术应用于大比例尺地形图测量,运用这项技术进行外业数据采集,与传统全站仪数据采集进行了精度比较.结果表明了三维激光扫描技术方案能够克服传统测量方式缺点,保证测绘数据质量,能够提高作业效率.【期刊名称】《北京测绘》【年(卷),期】2014(000)001【总页数】4页(P88-90,110)【关键词】地形测量;激光点云;车载;三维扫描【作者】薛效斌;钱星;马宁【作者单位】北京市测绘设计研究院,北京100038;城市空间信息工程北京市重点实验室,北京100038;国家开发银行规划局,北京100031;北京市测绘设计研究院,北京100038;城市空间信息工程北京市重点实验室,北京100038【正文语种】中文【中图分类】P217随着我国经济建设的高速发展,新兴技术与装备的发展应用为测绘地理信息产业注入了强劲动力,测绘技术有了很大的提高,新型的地形图测绘模式在技术上已经有了不少突破,车载移动测图系统就是其中的一种测图模式。
作为目前最新的技术成果,车载移动测图系统在国内外均有较大的发展,很多测绘科研和生产部门都对这种测绘技术进行了广泛的研究和试验。
随着三维激光扫描技术的不断成熟,激光扫描设备的测量距离和测量精度都有了质的飞跃,IMU陀螺精度也有了很大的提高,车载三维激光扫描就可以在城市大比例尺地形图测绘的生产实际中得到应用。
本文的研究目标就是对这一应用进行初步探讨,研究这一新兴测绘技术的先进性和局限性,以及在实际生产中进行大比例尺地形图数据采集应用的可能性。
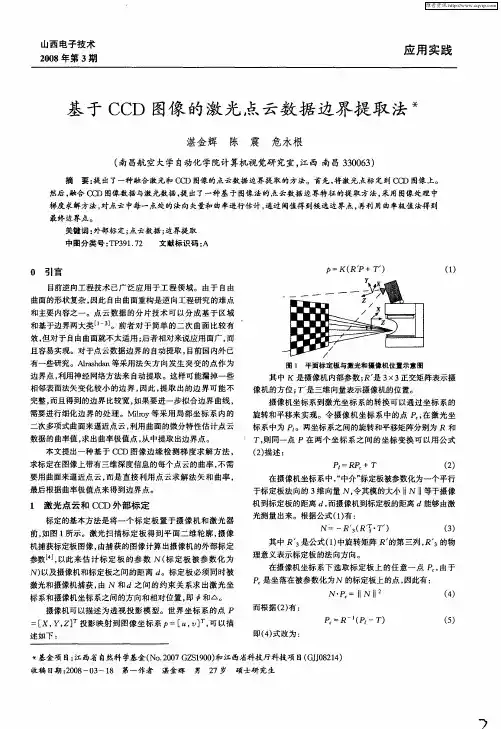
1 移动测图系统分类一般而言,车载移动测图系统中比较常见的可以分为三类:一是基于立体摄影测量的方式,通过集成多个CCD相机构成立体像对,以数字摄影测量的方式来进行室外场景的室内重建。
道路测量中车载移动测量技术的应用摘要:结合车载移动测量技术的特点以及项目的实际情况,研究将车载移动测量与传统全站仪测量相融合,高效、快速地在道路测量中进行应用,并利用传统全站仪测量进行精度检测,结果表明,车载移动测量技术与传统全站仪测量方法相结合的模式,可在道路测量中推广应用。
关键词:移动测量技术;道路测量;融合;精度;传统测量引言车载移动测量技术是当今测绘界最为前沿的科技之一,诞生于上世纪90年代初期。
随着GPS技术、惯性导航技术、CCD成像技术及激光扫描技术的发展和成熟,利用车载移动测量技术获取城市空间信息已成为一种趋势。
本文以广州市花都区道路改造测量项目为背景,以我单位车载多传感器移动测量系统为数据采集工具,通过实际的生产作业,对利用车载移动测量技术进行道路测量的方法进行了研究并取得了一定的成果,为今后利用车载移动测量技术进行道路测量提供了相关技术依据。
1车载移动测量数据采集及处理1、1项目背景因采集之前,应结合测区的实际情况设计移动测量车的行驶路线、速度以及数据采样的频率等,制定完整的外业实施方案。
在外业数据采集时,应注意如下几点:(1)设备参数设置:全景相机设为外脉冲触发模式,并根据实际的天气情况和湿度调整相机曝光参数;激光扫描仪设置线扫描模式、扫描角度、扫描密度等;惯导系统启动实时状态监测。
(2)为了确保测量数据的完整性,应尽量选择道路上车辆和行人较少的时候进行测量。
(3)移动测量车的行驶速度不宜过快,且尽量以固定速度行驶。
测量的同时,应记录下车辆行驶的轨迹,对比设计的行驶路线,检查车辆是否按设计路线覆盖到整个测区。
1、4车载移动测量数据处理车载移动测量数据处理利用我单位自主研发“移动道路测量系统影像点云配准融合软件”进行,主要包括三个部分:①激光点云数据的生成;②全景影像的合成;③可量测全景影像的实现。
通过GPS、惯导系统与激光扫描仪、全景相机等设备在空间上刚性固定在同一平台上,利用GPS、惯导系统提供车辆在移动过程中的位置和姿态,与激光扫描仪数据和全景影像进行整合,获得有精确位置信息的三维点云数据以及全景影像数据。
倾斜影像与LiDAR点云数据融合关键技术应用探讨摘要:倾斜摄影和机载LiDAR都是利用高精度航空遥感技术获取地形地貌信息,倾斜摄影通过倾斜航拍的方式,利用影像三角测量技术获取地面三维坐标信息,机载LiDAR通过激光束与地面交互,测量反射信号的时间差和传播距离,计算出地面点的坐标位置。
基于此,文章主要分析了倾斜影像与LiDAR点云数据融合关键技术的应用。
关键词:倾斜影像;LiDAR;点云;数据融合;关键技术;应用倾斜影像和LiDAR点云数据融合技术应用的重要性在于可以提高地理信息数据的精度、全面性、可视化效果和应用价值,有助于推动城市规划、土地管理、交通规划、灾害预防等领域的发展,具有重要的应用前景和推广价值。
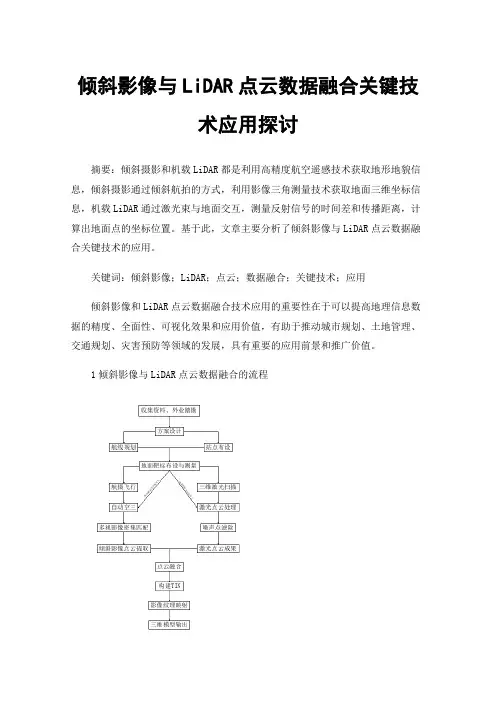
1倾斜影像与LiDAR点云数据融合的流程图1 融合建模流程图首先,将机载LiDAR点云数据与其自身携带相机拍摄的正摄点云进行融合,形成LiDAR正摄点云数据,将正摄纹理信息赋予机载LiDAR点云;其次,将LiDAR正摄点云数据与倾斜摄影空三数据进行融合,形成融合点云数据,使倾斜纹理信息赋予LiDAR正摄点云数据[3]。
2数据融合技术2.1多源数据的套合多源数据之间的套合是指多种采集数据通过某种匹配方法,使之配准在一起。
只有数据基准一致,才能实现不同数据间的融合。
这里可通过两种数据套合方案实现:1)不同数据使用同一绝对坐标系,即具有统一数据基准;2)不同数据间无统一绝对坐标系,以手动添加控制点的形式,固定其中一类点云数据空间坐标不变,使其它点云数据通过手动控制点向固定数据配准。
两种方法均可实现多种数据间的套合处理,使用哪一种应依据具体情况而定。
若方便布设地面像控点,可使用方案一;若地形复杂,但地表特征明显,亦可使用后者。
2.2正摄影像与机载LiDAR点云数据的融合机载LiDAR在航飞扫描的同时,正摄相机也参与了垂直角度的拍摄,形成正摄影像数据,此过程即将机载LiDAR点云与正摄影像之间的融合,赋予空间三维点云以光谱信息[4]。
一种激光雷达与视觉融合的同步定位及建图算法
张亦然;钱银森;宋春林
【期刊名称】《信息技术与信息化》
【年(卷),期】2022()12
【摘要】室内移动机器人自主导航依赖于同步定位及建图技术,激光雷达与相机作为主流传感器正在不断深入应用到机器人定位与建图,但是单一传感器存在的缺陷不可避免,视觉传感器采集环境特征信息丰富,但视野范围较窄,而且对环境变化较为敏感;三维激光雷达检测精度较高,但价格昂贵,不适合生产生活应用。
基于上述问题,提出了一种视觉与激光相融合的SLAM算法框架。
首先利用惯性测量单元IMU对RPLidar采集到的雷达数据进行畸变校正处理,同时将Astra Pro深度相机获取的三维数据映射到二维坐标系,通过扩展卡尔曼方法将激光数据与深度数据相融合,最终在实际环境下进行建图比较,获得了更加完整的地图,从而验证了该文算法的可靠性和有效性。
【总页数】4页(P5-8)
【作者】张亦然;钱银森;宋春林
【作者单位】同济大学电子与信息工程学院;同济大学中车捷运研究院
【正文语种】中文
【中图分类】TP2
【相关文献】
1.基于单目视觉的同时定位与建图算法研究综述
2.基于激光与视觉融合的车辆自主定位与建图算法
3.一种改进的地下车库弱纹理下智能汽车即时定位与建图算法
4.一种融合视觉与IMU的车载激光雷达建图与定位方法
5.基于滑动窗口优化的激光雷达惯性测量单元紧耦合同时定位与建图算法
因版权原因,仅展示原文概要,查看原文内容请购买。
S S W车载移动测量系统及其应用刘先林*摘要:基于激光扫描仪的SSW车载移动测量系统由数据采集和点云数据处理两大模块构成。
本文详细介绍了系统的硬件构成、工作原理、关键技术,以及基于JX4-G硬件平台的点云数据处理系统(DY-2点云工作站)的基本功能,分析了系统的优势、应用领域。
展望了系统的应用前景和今后的研究方向。
关键词:激光扫描仪移动测量组合导航点云工作站一引言移动测量系统(Mobile Mapping System, MMS)是20 世纪90 年代兴起的一种快速、高效、无地面控制的测绘技术[1]。
最初人们利用摄影测量技术集成组合导航技术构建移动测量系统,实现地面移动摄影测量,获取目标地物的影像和空间信息数据。
由于地面摄影测量自身的局限性(视距变化大且短,同名点自动匹配困难等),系统所测数据精度较低,数据处理工作量大。
激光测距技术出现后,很快在测绘领域展开应用。
先后出现了激光测距仪和激光扫描仪。
新一代的移动测量系统就是将激光扫描仪、组合导航系统和CCD相机集成实现移动中直接获取目标物绝对坐标和纹理信息等数据的。
由于地面测量环境复杂,GPS信号经常失锁,集成车载激光扫描移动测量系统(以下简称移动测量系统)技术难度很大。
但其数据处理自动化程度高,数据结果直观,精度高。
SSW车载移动测量系统(以下简称SSW系统)(见图1)就是以激光扫描仪为主要传感器的新一代移动测量系统。
二 SSW系统结构与工作原理(一)系统结构*刘先林,中国工程院院士,研究员,博士生导师,中国测绘科学研究院名誉院长。
SSW系统由激光扫描仪、IMU、GPS、里程计、线阵相机、面阵相机、电动转台、供电和控制系统(笔记本电脑)、车载升降平台构成。
各模块通过机械结构集成为一体,以GPS时间为主线保证时间的同步和协调,通过相互间结构关系解求所测目标点绝对坐标。
图1. SSW车载移动测量系统车载升降平台和电动转台是系统搭建的基础平台。
车载平台由全顺车改装而成,在车子后半部分安装升降平台并在顶部开窗。