网络化控制系统研究综述_692
- 格式:doc
- 大小:88.00 KB
- 文档页数:10
论电气工程与网络化控制系统的研究随着工业通信网络的发展,控制系统的结构发生了变化,网络控制系统便应运而生了。
网络控制系统的发展同工业通信网络的发展有着密切的关系,因而对工业通信网络的发展历程、现状及发展趋势等予以必要的关注。
一、基于网络的闭环伺服控制系统伺服控制系统是以控制器为核心,以电力电子功率变换装置为驱动电路,以电动机为执行机构,在控制理论指导下组成的电力传动控制系统。
这类系统控制电动机的转矩、转速和转角,将电能转换为机械能,实现运动机械的各种运动要求。
伺服系统的控制目标是:(1)要求的位置、速度控制的精度高;(2)要求系统动态响应快,稳定性好;(3)启动力矩大,等等。
将网络引入控制系统后,则要求以网络闭环的伺服控制系统要保持原有系统的高精度、稳定性和较好的动态性能。
针对伺服系统定位或跟踪精度高,响应速度快等特点,在以网络闭环的伺服系统中,如何补偿网络时延、数据包丢失等对系统稳定性和性能的影响成为亟待解决的问题。
其次,针对系统实时性的要求,寻求的控制策略能在保证系统控制性能接近最优的情況下,减小算法运行时间,使得该方法具有较大的实际应用价值。
二、基于网络控制的逆变器并联系统电力电子的通信应用与研究,越来越引起人们的重视。
电力电子系统中的网络不仅仅是一般信息传递的媒介,更应成为控制系统的重要参与者。
为提高电力电子系统的性能,可通过让网络配合控制环运行,利用网络的调度与控制器的控制使电力电子信息流能合理运动。
逆变器是实现直流电能转换为交流电能的功率变换装置,在交流电动机变频调速系统、柔性交流输电系统、有源电力滤波器、不间断电源(UPS)、非空调列车的车轴发电机供电系统等得到了广泛的应用。
为了扩展供电容量、实现冗余以提高系统的可靠性,需要实现逆变器并联技术。
根据并联系统运行时各个模块之间是否有信号连线,并联控制方案可以分成两大类:有互联信号线并联技术和无互联信号线并联技术。
采用有互联信号线的控制方法是为了获得良好的并联特性而牺牲冗余度和增加复杂连线,采用无互联信号线的并联控制方法实现了冗余度但电流均分效果下降。
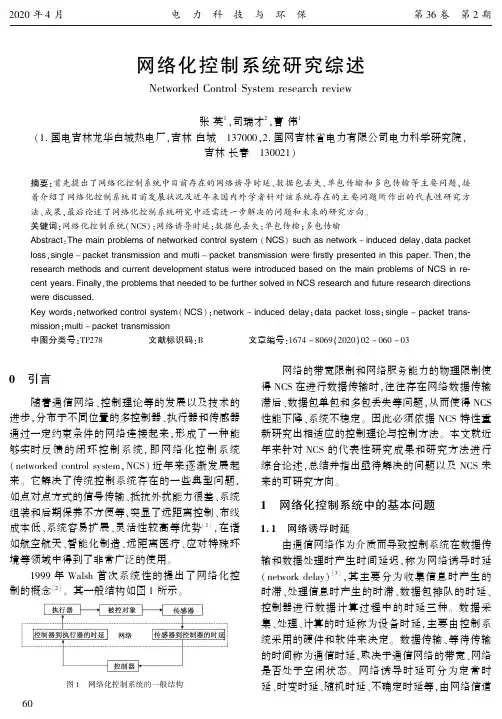
网络化控制系统研究综述NetworkedControlSystemresearchreview张英1ꎬ司瑞才2ꎬ曹伟1(1.国电吉林龙华白城热电厂ꎬ吉林白城㊀137000ꎬ2.国网吉林省电力有限公司电力科学研究院ꎬ吉林长春㊀130021)摘要:首先提出了网络化控制系统中目前存在的网络诱导时延㊁数据包丢失㊁单包传输和多包传输等主要问题ꎬ接着介绍了网络化控制系统目前发展状况及近年来国内外学者针对该系统存在的主要问题所作出的代表性研究方法㊁成果ꎬ最后论述了网络化控制系统研究中还需进一步解决的问题和未来的研究方向ꎮ关键词:网络化控制系统(NCS)ꎻ网络诱导时延ꎻ数据包丢失ꎻ单包传输ꎻ多包传输Abstract:Themainproblemsofnetworkedcontrolsystem(NCS)suchasnetwork-induceddelayꎬdatapacketlossꎬsingle-packettransmissionandmulti-packettransmissionwerefirstlypresentedinthispaper.ThenꎬtheresearchmethodsandcurrentdevelopmentstatuswereintroducedbasedonthemainproblemsofNCSinre ̄centyears.FinallyꎬtheproblemsthatneededtobefurthersolvedinNCSresearchandfutureresearchdirectionswerediscussed.Keywords:networkedcontrolsystem(NCS)ꎻnetwork-induceddelayꎻdatapacketlossꎻsingle-packettrans ̄missionꎻmulti-packettransmission中图分类号:TP278㊀㊀㊀㊀㊀文献标识码:B㊀㊀㊀㊀㊀文章编号:1674-8069(2020)02-060-030㊀引言随着通信网络㊁控制理论等的发展以及技术的进步ꎬ分布于不同位置的多控制器㊁执行器和传感器通过一定约束条件的网络连接起来ꎬ形成了一种能够实时反馈的闭环控制系统ꎬ即网络化控制系统(networkedcontrolsystemꎬNCS)近年来逐渐发展起来ꎮ它解决了传统控制系统存在的一些典型问题ꎬ如点对点方式的信号传输㊁抵抗外扰能力很差㊁系统组装和后期保养不方便等ꎬ突显了远距离控制㊁布线成本低㊁系统容易扩展㊁灵活性较高等优势[1]ꎬ在诸如航空航天㊁智能化制造㊁远距离医疗㊁应对特殊环境等领域中得到了非常广泛的使用ꎮ1999年Walsh首次系统性的提出了网络化控制的概念[2]ꎮ其一般结构如图1所示ꎮ图1㊀网络化控制系统的一般结构㊀㊀网络的带宽限制和网络服务能力的物理限制使得NCS在进行数据传输时ꎬ往往存在网络数据传输滞后㊁数据包单包和多包丢失等问题ꎬ从而使得NCS性能下降㊁系统不稳定ꎮ因此必须依据NCS特性重新研究出相适应的控制理论与控制方法ꎮ本文就近年来针对NCS的代表性研究成果和研究方法进行综合论述ꎬ总结并指出亟待解决的问题以及NCS未来的可研究方向ꎮ1㊀网络化控制系统中的基本问题1.1㊀网络诱导时延由通信网络作为介质而导致控制系统在数据传输和数据处理时产生时间延迟ꎬ称为网络诱导时延(networkdelay)[3]ꎬ其主要分为收集信息时产生的时滞㊁处理信息时产生的时滞㊁数据包排队的时延㊁控制器进行数据计算过程中的时延三种ꎮ数据采集㊁处理㊁计算的时延称为设备时延ꎬ主要由控制系统采用的硬件和软件来决定ꎮ数据传输㊁等待传输的时间称为通信时延ꎬ取决于通信网络的带宽㊁网络是否处于空闲状态ꎮ网络诱导时延可分为定常时延㊁时变时延㊁随机时延㊁不确定时延等ꎬ由网络信道062020年4月电㊀力㊀科㊀技㊀与㊀环㊀保第36卷㊀第2期架构㊁通信网络负载㊁通信协议㊁通信网络的传输速率等因素决定[4]ꎮ1.2㊀数据包丢包数据在NCS的控制器㊁执行器㊁传感器之间进行传输时ꎬ会因为数据包规模过大㊁数据信息交换㊁通信网络带宽限制等情况而产生数据包丢失(pack ̄etdropout)[5]ꎮ数据包丢失主要分为两种情况ꎮ一是因为一次传输的数据包数量较多ꎬ规模较大ꎬ数据发生碰撞ꎬ网络出现拥塞ꎬ节点申请失败ꎬ导致数据包在规定的时间内没有送达而丢弃ꎻ二是为了保证所传输数据信息的有效性ꎬ系统会对所传输的数据进行定时更新ꎬ当数据包在发送后没有在一定时间内送达ꎬ就会丢弃这个数据包ꎮ对于稳定的NCS而言ꎬ只能有一定数值的数据包丢失ꎬ当数据包丢失超过这个值时ꎬ系统就会不稳定[6]ꎮ1.3㊀单数据包传输和多数据包传输单数据包传输是利用一个数据包来传输NCS的控制机构和测量变送机构等待传输的信息ꎮ当单个数据包位数有限ꎬ或NCS中的控制机构㊁执行机构㊁测量变送机构距离较远时ꎬ信息不能通过一个数据包进行传输ꎬ就需要多个数据包传输ꎮ多数据包传输是利用至少两个或多个数据来传输NCS的控制机构和测量变送机构等待传输的信息ꎮNCS的网络架构类型较多ꎬ不同类型网络的数据包容量不一样ꎬ数据传输时所采用的传输方式也不一样ꎬ系统建模㊁性能分析㊁控制器设计方法也不同ꎬ比如Ether ̄net和ControlNet的数据包容量大ꎬ适合单数据包传输ꎻDeviceNet和CAN总线的数据包容量小ꎬ适合多数据包传输ꎮ在单数据包和多数据包传输过程中都会产生数据丢包ꎬ对系统性能造成影响ꎬ降低系统稳定性ꎮ2㊀网络化控制系统研究方法NCS存在的上述问题会降低控制系统性能ꎬ影响系统稳定性ꎮ鉴于此ꎬ本节将讨论存在上述问题时的NCS研究方法ꎮ2.1㊀存在网络诱导时延的NCS研究方法NCS中存在的网络诱导时延有固定时延㊁随机时延㊁时变时延㊁不确定时延等ꎬ在系统分析设计过程中不可忽略ꎮ目前很多学者在时延问题上已经做了深入的研究ꎮ比如杨蒙蒙等[7]针对存在时变时延的网络化控制系统ꎬ分析出时变时延的下限ꎬ根据此下限建立了一个具有三重积分项的李雅普诺夫函数ꎬ并给出了控制器的存在性条件ꎻ邱占芝等[8]对存在时延的NCS系统ꎬ对时延进行了补偿ꎬ改进了BP网络ꎬ基于此网络提出了一类快速PID网络化控制系统ꎻ刘义才等[9]预测时延的上界ꎬ将其等分ꎬ结合马尔科夫跳变理论ꎬ分析和研究时延的特性ꎬ建立了随机时延的有界模型和网络化控制系统的离散时间参数不确定模型ꎻ杨飞生等[10]对存在时延的NCS系统的建模方法进行了研究ꎬ将事件触发NCS系统建模成连续时滞NCS模型ꎻ关治洪等[11-12]基于马尔科夫跳变系统框架ꎬ分别针对具有随机短时延和长时延的NCS系统建立了模型并进行了性能分析ꎮ各种延时的具体原因不尽相同ꎬ其改进的方式㊁效果也不完全一致ꎬ但最终目的均是缩短时延ꎮ2.2㊀丢包问题的NCS研究方法在NCS中ꎬ因为存在通信网络ꎬ受其影响ꎬ除了存在网络诱导时延问题外ꎬ还存在数据包丢包问题ꎬ这会导致NCS系统性能降低ꎬ严重的会使得系统变得不稳定ꎮ目前ꎬ很多学者针对数据包丢包问题展开了研究ꎬ得到了许多有效的研究成果ꎮ例如当数据包丢失规律满足某个概率分布时ꎬ采用马尔科夫理论[13]或者Bernoulli随机序列[14]来描述发生不确定丢包情况时的系统ꎻ通过一个能够降低系统保守性的李雅普诺夫函数ꎬ充分考虑丢包过程ꎬ设计了保成本控制器[15]ꎻ针对不同测量变送机构的信道丢包率不同ꎬ研究了自适应融合滤波交互式多模型方法ꎬ对常规网络化控制系统数学模型进行了滤波ꎬ同时对其故障模型也进行了滤波[16]ꎮ2.3㊀多数据包传输问题的NCS研究方法在网络化控制系统中使用多数据包传输方式ꎬ存在多个数据包无法同时到达的问题ꎬ会产生数据包丢包并增加数据包接收端对数据的处理时间ꎮ目前ꎬ针对多包传输问题的研究也非常广泛ꎮ文献[17]通过研究多数据包传递的NCS系统ꎬ基于异步动态理论建立了其数学模型ꎬ得到了满足网络化控制系统指数稳定的数据率条件ꎻ杨业等[18]把多数据包传输网络化控制系统建模为一类线性切换系统ꎬ通过切换系统理论ꎬ得到满足网络化控制系统指数稳定的充要条件ꎻ文献[19]提出多数据包周期性传输的网络控制系统稳定性与周期性切换系统的稳定性密切相关ꎬ并利用线性矩阵不等式ꎬ构造了稳定的状态反馈控制器模型ꎮ162020年张英等:网络化控制系统研究综述第2期2.4㊀多种问题的NCS研究方法在研究网络化控制系统性能时ꎬ仅考虑单一问题存在的情况ꎬ所得的研究结果并不准确ꎮ为了更好的对NCS系统进行性能分析和系统化设计ꎬ将网络时滞㊁乱序㊁单数据包丢包㊁多数据包丢包等网络化控制系统存在的问题综合起来进行研究非常重要ꎮ目前ꎬ对于综合考虑存在多种问题情况下的NCSꎬ不少国内外专家和学者提出了研究方法ꎮ刘于之等[20]针对同时存在网络时延和数据包丢失问题的NCSꎬ构造一个新的Lyapunov-Krasovskii泛函ꎬ基于鲁棒控制理论ꎬ对网络化控制系统控制器进行建模ꎬ并对网络化控制系统的鲁棒稳定性进行了研究ꎬ得到了有效的研究方法ꎻ文献[21]将同时具有网络时延和数据包丢失的NCS建模成具有四个子系统的开关系统ꎬ利用时间-窗口丢包率的概念和平均驻留时间方法ꎬ得到了闭式网络化控制系统鲁棒稳定的充分条件ꎮ3㊀结论与展望针对NCS中普遍存在的网络诱导时延㊁数据包丢包㊁单数据包传输㊁多数据包传输等问题ꎬ国内外专家进行了很多研究ꎬ取得了许多研究成果ꎬ并得到了行之有效的研究方法ꎮ但是ꎬ很多问题仍有待于进行进一步的深入研究ꎮ目前针对线性或非线性被控对象的研究较多ꎬ对于广义被控对象的研究较少ꎻ在研究NCS系统性能时ꎬ普遍集中在考虑单个问题或者相对独立的多个问题的情形ꎬ这显然并不满足实际控制要求ꎬ应综合考虑多个方面和问题对系统的影响ꎮ此外ꎬNCS系统的安全机制㊁控制性能㊁稳定性和可靠性等ꎬ都是需要进一步研究和完善的ꎮ总之ꎬNCS中还存在许多需要解决的问题ꎬ还需要进一步完善理论基础ꎬ这都为今后控制理论的发展提出了新的机遇和挑战ꎮ参考文献:[1]NilssonJ.Real-timecontrolsystemswithdelays.Sweden:LundIn ̄stituteofTechnologyꎬ1998.[2]WalshGCꎬYeHꎬandBushnellL.Stabilityanalysisofnetworkedcontrolsystems.In:ProceedingsoftheAmericanControlConference.PiscatawayꎬNJꎬUSAꎬ1999ꎬ2876-2880.[3]邱占芝ꎬ张庆灵ꎬ杨春雨.网络化控制系统分析与控制[M].北京:科学出版社ꎬ2009.[4]王岩ꎬ孙增圻.网络化控制系统分析与控制[M].北京:清华大学出版社ꎬ2009.6.[5]WalshGCꎬYeHꎬBushnellLG.Stabilityanalysisofnetworkedcon ̄trolsystems[J].IEEETransactiononControlSystemsTechnologyꎬ2002ꎬ10(3):438-446.[6]RabelloAꎬBhayaA.Stabilityofasynchronousdynamicalsystemswithrateconstraintsandapplications.IEEEproceedingsControlTheoryApplicationꎬ2003ꎬ150(5):546-550.[7]杨蒙蒙ꎬ钱伟ꎬ李冰锋.时变时延网络化控制系统的镇定[J].控制工程ꎬ2018ꎬ25(2):313-318.[8]邱占芝ꎬ李世峰.基于神经网络的PID网络化控制系统建模与仿真[J].系统仿真学报ꎬ2018ꎬ30(4):219-228.[9]刘义才ꎬ刘斌ꎬ石安伟.区间化随机时延的网络控制系统建模与控制[J].系统仿真学报ꎬ2018ꎬ30(2):654-663.[10]杨飞生ꎬ汪璟ꎬ潘泉.基于事件触发机制的网络控制研究综述[J].控制与决策ꎬ2018ꎬ33(6):4-12.[11]YangCXꎬGuanZHꎬHuangJ.Designofstochasticswitchedcon ̄trollerofnetworkedcontrolsystembasedongreedyalgorithm[J].IETControlTheory&Applicationꎬ2010ꎬ4(1):162-174. [12]GuanZHꎬYangCXꎬHuangJꎬetal.Stabilizationofnetworkedcon ̄trolsystemswithshortorlongrandomdelays:Anewmultiratemeth ̄od[J].InternationalJournalofRobustandNonlinearControlꎬ2010ꎬ20(16):1802-1816.[13]YuJYꎬWangLꎬYuM.Switchedsystemapproachtostabilizationofnetworkedcontrolsystems[J].InternationalJournalofRobustandNonlinearControlꎬ2011(21):1925-1946.[14]CloostermanMBGꎬHetelLꎬetal.Controllersynthesisfornet ̄workedcontrolsystems[J].Automaticaꎬ2010ꎬ46(10):1584-1594.[15]唐晓铭ꎬ杨爽ꎬ虞继敏ꎬ等.基于量化依赖Lyapunov函数的有界丢包网络控制系统的保成本控制[J].自动化学报ꎬ2018ꎬ44(8):1381-1390.[16]胡艳艳ꎬ金增旺ꎬ薛晓玲.基于异步IMM融合滤波的网络化系统故障诊断[J].自动化学报ꎬ2017ꎬ43(8):1329-1338. [17]孙海燕ꎬ侯朝桢.具有数据包丢失及多包传输的网络化控制系统稳定性[J].控制与决策ꎬ2005(5):511-515.[18]杨业ꎬ王永骥.一类多包传输网络化控制系统的设计及稳定性分析[J].信息与控制ꎬ2005ꎬ34(2):129-132.[19]YuMꎬYuanXꎬXiaoW.ASwitchedSystemApproachtoRobustStabilizationofNetworkedControlSystemswithMultiplePacketTransmission[J].AsianJournalofControlꎬ2015ꎬ17(4):1415-1423.[20]刘于之ꎬ李木国ꎬ杜海.具有时延和丢包的NCS鲁棒H_ɕ控制[J].控制与决策ꎬ2014ꎬ29(3):517-522.[21]WeiLIꎬWangQꎬDongCY.RobustH_ɕControlofNetworkedControlSystemswithShortDelaysandPacketDropouts[J].JournalofNortheasternUniversityꎬ2014ꎬ35(6):774-779.收稿日期:2019 ̄07 ̄19ꎻ修回日期:2019 ̄10 ̄23作者简介:张英(1980 ̄)ꎬ男ꎬ工程师ꎬ主要研究方向为电厂网络化控制研究及应用ꎮE-mail:zy1370000@163.com262020年4月电㊀力㊀科㊀技㊀与㊀环㊀保第36卷㊀第2期。
网络化控制系统:探讨网络化控制在控制系统中的应用和实践引言在过去的几十年里,控制系统一直在不断发展和演进,从最初的机械控制到电子控制,再到如今的网络化控制系统。
网络化控制系统是一种通过互联网或局域网连接各种设备和系统的控制系统,它的应用范围涵盖了各个领域,包括工业自动化、交通系统、能源管理等。
本文将具体探讨网络化控制在控制系统中的应用和实践。
网络化控制系统的背景和发展在过去,控制系统主要是基于本地控制的,通过硬线连接各种传感器、执行器和控制器,实现对系统的控制。
然而,随着计算机和网络技术的飞速发展,控制系统的构架也发生了变革。
网络化控制系统的出现使得各个部件之间的连接更加灵活和高效,同时也提供了更多的功能和扩展性。
网络化控制系统的原理和架构网络化控制系统的原理和架构主要包括传感器、执行器、控制器和通信网络。
传感器用于检测和采集系统的状态和信号,执行器用于执行控制指令,控制器用于实时处理和分析数据,并根据需要生成控制指令。
通信网络则负责传输数据和命令,实现各个组件之间的连接和协调。
网络化控制系统的应用领域工业自动化网络化控制系统在工业自动化中的应用非常广泛。
它可以实现生产线的自动化控制、设备的远程监控和维护,大大提高了工作效率和生产质量。
同时,网络化控制系统还可以将数据集中存储和处理,实现对生产过程的实时监控和优化。
交通系统交通系统是一个复杂的系统,包括交通信号灯、车辆导航和路况监控等。
网络化控制系统可以实现对交通信号灯的智能优化,根据交通流量和路况实时调整信号灯的时序,提升交通效率和安全性。
同时,通过车辆导航和路况监控的数据共享和分析,网络化控制系统也能够提供更准确的路况信息和导航建议。
能源管理能源管理是一个重要的领域,网络化控制系统可以应用于电力系统、供暖系统和照明系统等。
通过对各个能源设备和系统的实时监控和调度,网络化控制系统可以实现能源的高效利用和节约。
同时,它还可以提供能源消费的实时数据和分析,帮助用户合理安排能源使用,降低能源消耗和污染。
安全网络化控制系统的设计和分析随着科技的不断发展和应用,越来越多的领域开始依赖于网络化控制系统的运行,尤其是能源、交通、军事等领域。
网络化控制系统的普及应用,为人们的生产、生活带来了极大的便利,但是也带来了许多安全风险。
网络攻击、黑客入侵等因素可能威胁到网络化控制系统的安全稳定运行,因此,对安全网络化控制系统的设计和分析显得尤为重要。
一、网络化控制系统的安全性问题随着技术水平不断提高,网络化控制系统在实际应用中已经取得了很大的成果,但是安全问题始终存在。
首先,网络化控制系统存在着严重的安全隐患。
网络攻击、黑客入侵等非法行为可能导致系统崩溃、数据泄漏、财产损失等严重后果。
其次,网络化控制系统跨越多个领域,涉及面广,往往难以实现安全管理和保护。
二、设计安全网络化控制系统需要满足的原则安全网络化控制系统的设计需要符合以下原则:1. 技术先进性:网络化控制系统应该使用最先进的技术和工具,以提高系统的保护和管理能力。
2. 完整性:安全网络化控制系统需要满足完整性原则,保证系统的每一个组成部分的安全,防止黑客入侵和破坏系统。
3. 可靠安全性:充分保证网络化控制系统的可靠性和安全性,确保实现系统的完全安全。
三、安全网络化控制系统的设计原则1. 建立保密机制:建立完善的保密机制,将重要数据加密,确保关键信息不会外泄。
2. 使用身份认证机制:通过身份认证机制对使用人员进行识别和认证,防止冒充和非法访问。
3. 实施防火墙控制:网络化控制系统需要部署防火墙设施,拦截非法攻击和恶意代码对系统的侵入。
4. 建立多层安全防护体系:安全网络化控制系统需要建立多层防护体系,以保障数据和系统的安全。
5. 定期备份与更新:网络化控制系统需要定期备份数据和进行系统更新,保证系统的稳定和安全性。
四、安全网络化控制系统的分析安全网络化控制系统的分析从以下几个方面展开:1. 安全控制机制的设计与实现:安全网络化控制系统需要建立完善的安全控制机制,实现对系统的安全防护。

K e y W ords: Networked control systems; Multi-agent systems; Stabilization; Mean-square stabilization; Consensus; Delays; Packet dropouts目录第一章绪论 (1)1.1研宄背景及意义 (1)1.2研宄现状 (2)1.2.1网络化控制系统的研宄现状 (2)1.2.2多智能体系统的研宄现状 (3)1.3主要贡献和结构安排 (5)第二章预备知识 (7)2.1 图论知识 (7)2.2主要定义与引理 (8)第三章网络化控制系统的分析与建模 (10)3.1 引言 (10)3.2 问题描述 (10)3.3稳定性分析 (17)3.3.1任意丢包情形 (18)3.3.2 Markov 丢包情形 (23)3.4数值仿真 (24)3.5 小结 (25)第四章固定拓扑下带有参考信号的离散多智能体系统的一致性研究 (26)4.1 引言 (26)4.2系统模型 (27)4.3 —致性分析 (27)4.4 数值仿真 (33)4.5 小结 (36)第五章总结与展望 (37)参考文献 (38)符号表《 (44)发表论文和科研情况的说明 (45)致潘I (46)第一章绪论第一章绪论§1.1研究背景及意义近几十年来随着计算机软硬件技术和网络技术的飞速发展,促进了网络化控制系统(Networked Control Systems, N C S s)这一新的控制系统的出现,并迅速在经济、文化、教育、工程等各个领域占据着越来越重要的地位.用通讯网络代替 传统的点对点连接方式,使系统分布式控制和远程操作成为可能.这种网络的引入使得控制系统大大降低了重量、体积以及成本,并在一定程度上增加了系统的灵活性和可靠性.“网络控制系统”一词最早于20世纪90年代由美国马里兰大学的W alsh提 出.是指利用通讯网络实现地域上分布的现场传感器、控制器及执行器之间的信息相互交,以实现被控对象的实时反馈控制,这样的一类控制系统称为网络控制系统.与传统的控制系统相比,网络化控制系统具有信息资源共享、连接线数减少、成本降低、易于扩展、易于维护、灵活性强等优点.这些优点促进了网络化控制系统在航天航空、设备制造、大规模分布式工程控制、智能机器人、远程医疗 和教学等工程实践中的应用.21世纪,分散控制的通信代理系统已成为一具有挑战性的新的研宄领域,其研宄领域涉及的学科范围广泛,包括物理、生物物理学、神经物理学、系统生物 学、应用数学、力学、计算机科学和控制理论等.其中,多智能体系统(Multi-agent System s)的研宄已经成为控制系统领域一个研宄热点.它的研宄不仅能够为自然和社会中出现的复杂现象提供合理的理论解释,而且可以更加深刻地揭示自然和社会规律.在多智能体系统中,每个智能体通过与邻居个体之间的通讯连接来获取信息,并根据获取的信息调整自身的状态,从而达到完成某项复杂的任务、提高整体工作效率或适应未知环境协调群体行为等目的.在工程实践中,经常要求所有的智能体就某个共同的物理量达到一致或共享,这个物理量可以是编队控制中的期望队形、集会问题中的目的地或者到达目的地的时间等,这就是所谓的“一致性问 题”.对多智能体一致性问题的研宄在理论上和工程上都有着重要意义.1第一章绪论§1.2研究现状在工程实践中,采用网络通信方式代替传统的点对点连接方式,虽然给系统带来很多的优势,但是由于网络中的信息源很多,信息的传送要占用网络通讯资源,而网络的承载能力和通信带宽有限,必然造成信息的冲撞、重传等现象的发生,使得数据在传输过程中不可避免地存在时延、数据丢包和多包传输等问题.这 些新的问题的出现使得传统控制中的许多性质(如信息同步、信息无延时性)不再成立,所以不能仅仅依靠传统的控制理论来实现网络化系统的分析与设计.§1.2.1网络化控制系统的研究现状网络化控制系统的研宄是近年来国际控制领域研宄的主题之一.不同于传统的计算机控制,网络化控制系统会更多的受到网络环境的影响.比如网络诱导时延、数据丢包、错序以及单包与多包传输等,都将影响到闭环系统的性能.直接采用传统的控制理论,已无法设计出有效的控制策略.因此,需要针对网络化控制系统的特点提出新的研宄思路和研宄方法.网络诱导时延(N etw orked-in d u ced D ela y)在网络化控制系统中,多个网络节点共享网络通道.由于网络带宽有限且网络中数据流量变化不规则,当多个节点通过网络交换数据时,常常出现数据碰撞、多路径传输、连接中断、网络拥塞等现象.因而不可避免地出现信息交换时间延迟,这种由网络引起的信息交换时间延迟称为网络诱导时延.网络诱导时延是随机的、恒定的、有界的、还是不确定的,取决于通信网络的类型和采用的通信协议.时延会降低系统的性能,是系统的稳定范围变窄,甚至使系统失去稳定性.因而时延是网络化控制系统分析和设计中不可忽略的重要因素之一.目前对这一因素的研宄主要有以下两类:(i)短时延[1-3]:时延小于一个采样周期,即0 <Tf c< h; (i i)长时延[4-5]:时延大于采样区间,即0 <Tk<lh, (I>1),由于时延大于采样周期,控制器(执行器)在一个采样周期内就有可能获取0,1或多于1且最大为I个信息包.与固定时延相比随机时延、时变时延更难处理.特别地,当时延大于一个采样周期时,研宄更为困难.近十年来,已经有很多学者研宄出了许多种方法(如模型预测控制(M P C) [6-7]、随机系统[8]、允许最大时延方法(M A D B) [9- 13]和切换系统方法[14-17])对带有长/短时延、固定/随机/时变时延的网络化控制系统进行了研宄并取得了一定的成果.然而,目前存在的网络化控制系统模型第一章绪论几乎都只适用于一种类型的时延系统,缺乏通用性.丢包(Packet D rop ou ts)丢包:网络化控制系统通过网络传输数据时,不可避免地出现网络堵塞及连接中断等现象,最终往往导致数据包丢失.另外,过长的网络诱导时延带来传输中数据错序,采用新数据的机制时也会造成数据包丢失.一般地,一个网络化控制系统允许一定量的数据丢失,但数据包丢失过多时将会导致系统失去稳定性.实际上,每个网络化控制系统都要允许一定量的丢包长度.称系统能承受的最大丢包长度为容许丢包长度,它可以视为网络化控制系统的一个性能指标.因此,数据丢包一直是学者研宄的内容之一.一个稳定运行的网络化控制系统容许一定量的数据包丢失,但数据包丢失率超过一定值时将破坏系统的稳定.文献[18]针对传感器与控制器间利用网络连接的情况,研宄了单包传输有数据包丢失时系统的建模和稳定性问题,但没有考虑 网络时延.对于连续时间的网络化控制系统,将其建模为由事件率约束的异步动态系统,其中网络按一定概率切换与数据包丢失概率相互对应,当系统的采样率足够快时,能够确保系统的稳定性.而离散时间的网络化控制系统,丢包过程常常被建模为Bernoulli过程或者M ark ov链,带有如此性质的网络化控制系统常被看作一类特殊的跳变系统,且系统的均方稳定已有许多好的研宄结果[19-23].§1.2.2多智能体系统的研究现状在自然界和人类社会中,随处可见生物群产生的集体行为,比如群居黄蜂或白蚁的协助筑巢行为、鸟群的编队迀徙、鱼群的结队巡游、萤火虫的同步发光等.在生物群中,单个个体之间能够通过相互协调、共同合作使整个群体能够完成某些复杂的、单个个体所不能或难以胜任的任务.人们逐渐意识到可以把这些群体行为中的合作机制应用到工程实践中,这就促进了人们对多智能体系统的研宄.近年来,多智能体系统迅速发展成为控制领域中一门新兴的复杂系统控制科学,由于它的应用性和对一些自然、社会现象的有力解释,使得它又具有了学科交叉性、理论性和实用性强的特点,其理论研宄涉及到的学科包括控制、数学、生物、物理、通讯、计算机和人工智能等.多智能体系统的研宄一方面能够为自然和社会中出现的复杂现象提供合理的解释,更加深刻地揭示自然、人类社会活动和经济活动的规律;另一方面多智能体系统协调控制的研宄又在多自主机器人/车辆系统、传感器网络和人造卫星簇等领域有着广阔的工程应用前景,为新科技的开发与发展提供重要的理论基础和思第一章绪论想方法.在上述工程中存在一个共同的特点,就是需要控制系统的某些关键量使得它们随着时间的演化能够达到统一,比如控制多个自主体机器人/车辆形成某一期望队形、使得多个传感器对采集到的不确定信息实现数据融合、控制人造卫 星簇以达到某种共同的理想姿态.这一控制目的也就引发了人们对多智能体系统的一致性进行研宄的热潮.为了完成一项任务,经常要求所有的智能体就某个共同的物理量达到一致或共享,这个物理量可以是编队控制中的期望队形、集会问题中的目的地或者到达目的地的时间等,这类问题就是一致性问题.对一致性问题的研宄最早可以追溯到上世纪70年代D eG root在管理科学和统计领域所做的研宄工作[24].而后出现的一致性问题理论方面的研宄工作都一定程度上受到[24]的推动和启发.智能体模型为满足实际工程应用的需要,研宄者们已经不再局限于研宄简单的Vicsek 模型和连续时间单积分器模型,智能体模型的假设已经延伸到了质点动力学模型[25-28]、二阶积分器/高阶积分器[29-30]、一般线性控制系统[31]、一般连续时间非线性系统、一般离散时间非线性系统等.具体地,通过引入状态的导数,把一阶模型扩充成二阶模型,[29、32]分别设计了同时依赖状态和速度的一致性协议,并得到多智能体达到一致的充要条件.文献[29]给出协议Ui(t)=^^a ij(x i(t) - Xj(t)) -kvi(t),jeNi(t)其目的是保证所有智能体收敛静止于同一个点(称为静态一致).文献[27]给出另 一个协议ui(t)=-E ai j(xi⑷-x j(t)) - k E ai j(vi(t) -vj⑷),jeNi(t) jeNi(t)其目的是保证所有的智能体能够收敛到一起并以相同的速度运动(称为动态一致). 与二阶连续多智能体系统相比,二阶离散多智能体系统的一致性问题的研宄成果相对较少.文献[32]研宄了具有时滞的二阶离散多智能体系统的一致性Xi(t + 1) =Xi(t) +T v i(t),v i(t + 1) = Vi(t) +T u i(t),i =1,…,n,其中Mi(t) =-povi(t) +Pl Y j aij (Xj(t -Tij) - Xi (t)) +P2 aij (vj (t -Tij)-jeNi(t) jeNi(t)v(t)).许多关于二阶多智能体系统的一致性结果都可以延伸到高阶多智能体系统中,如文献[30、33、34、35]将二阶连续多智能体系统的协议扩展到了高阶连续多智能体系统中,建立了一致性问题可解的充分或者充要条件.控制目I和性能从多智能体系统的控制目标和系统性能角度看,出现了有限时间一致问题[36]、异步一致性[37]、最优一致性问题[38]、对参考信号/虚拟领航者的跟踪问题[30、39]等.有限时间一致性问题是从系统的收敛速度角度来研宄一致性问题的.文献[36]通过设计非线性一致性协议,使得多智能体系统能够在有限时间内达到一致.由于异步可能给系统带来其它负面影响,如诱导时延和时变拓扑,所以对所给出协议的鲁棒性有了更高的要求,加强了分析难度.比较典型的离散时间异步模型是由[37]给出的.最优一致性问题是指寻找和设计分布式控制律使得多智能体系统在解决一致性问题的同时,每个智能体或者整个系统的某给定性能指标达到极小值(极大值),其中文献[38]考虑了离散时间多智能体系统的最优平均一致问题.对参考信号/虚拟领航者的跟踪问题的研宄,系统最终的一致状态不再是一个常量,而是某个动态的量.文献[30]和文献[39]均考虑的是使个体的状态去跟踪动态变量纟,其对部分个体是可见的,并遵循某个微分方程,文献[30、39、40] 的结果则表明,可以设计一致性协议使得系统中每个智能体的状态均渐进地收敛到某动态参考信号或者某虚拟领航者的状态轨迹.§1.3主要贡献和结构安排本文研宄内容分以下两大部分:一方面研宄带有时延和丢包的网络化控制系统,采用分时驱动的控制器,给出了系统达到稳定的充分条件;另一方面考虑带有参考信号的多智能体系统,针对固定拓扑下的离散系统,给出了系统一致可达的充分条件和充要条件.论文的结构安排如下:第二章:介绍一些常用概念、主要引理.第三章:利用切换系统方法研宄了在时延和丢包共同影响下,网络化控制系统的建模和稳定性问题.基于引入有效采样数据包概念,网络化控制系统被表示成一类新的切换系统.此类切换系统带有双重切换信号,且分别与时延和丢包对应相关.这种建模结果一方面便于更深入的研宄丢包和时延对系统的影响,另一方面增加了分析和综合的难度.从而,网络化控制系统的稳定性问题就被转化成为切换系统在双重切换信号下的稳定性问题.进一步地,基于切换Lyapunov方法、平均停留时间方法及矩阵不等式理论,得到了线性矩阵不等式形式的时延和丢包依赖的稳定条件.最后,仿真验证了理论的有效性.第四章:利用图理论、矩阵理论、系统变换方法和稳定性理论研宄了在带有参考信号条件下,多智能体系统的一致可达问题.这与一般的多智能体系统的一致性研宄不相同.它是在给定整个系统一个的参考信号前提下,需要设计系统的通讯协议使得所有多智能体的状态信息与参考信号的状态信息达到动态一致.要求所有智能体根据参考者的信息和邻居的信息改变自身的状态,最终与参考信号状态达到一致.最后仿真验证了理论的有效性.第五章:总结本文工作,同时对网络化系统的稳定性和一致性进行了展望,指出了今后可以开展的研宄内容.第二章预备知识本章给出了矩阵分析中的一些基本概念和结论,介绍了代数图论和随机矩阵中的一些基本定义和基本性质.§2.1图论知识在多智能体系统的研宄中,图论是一个重要的分析工具,它可以模拟各个智能体之间的信息交换情形.下面简单介绍一些与图有关的基本概念以及相关矩阵的一些基本性质.考虑网络中有n个智能体,用节点i表示第i个智能体,其中i G丨1,2,…,n}.如果当前时刻智能体J能收到智能体i的信息,则称从节点i到节点j的边是连接的;否则称节点i与节点j之间没有连接的边.各个智能体之间相互交换信息,就形成了连接拓扑.图论中常用符号G =(V, E,A)表示一个图(grap h),其中V ={1,2,…,n}表示系统的n个节点集合;E C V X V表示图G的边集;(z,j) G E表示图〔S中有从i到J的边;矩阵A=[aij]称为图G的加权邻接矩阵(weighted adjacency matrix).本文仅考虑邻接权重a^ >0的情况,即a^ >0当且仅当(z,j) G E(G). 用N i表示节点的邻居集合,即N i ={j:(j, i) G E}.有向图(directed graph) G =(V,E)是由节点集V=(v\,v2,…,¾)和边集E C V X V组成的.对于节点V i和Vj,它们之间的边定义为(v i,v j),其中v“v j分别称为该边的父节点(parent vertex)和子节点(child vertex).如果一条边的两个节点是相同的,则称这样的边为自环(self-loop).如果v]能够获得来自v的信息,那么(v i,Vj) G E ,否则(v i,v j) G E .有向图中形如(i,ii), (i i,i2),…的一系列 边称之为有向路径(directed road).如果从有向图的任何一个顶点到另外一个不同的顶点之间都有有向路径存在,则称有向图是强连通的(strongly connected).如果(v i,v j) G E蕴含着(v j,v i) G E,则称图G为无向图(undirected graph). 作为一类特殊的有向图,如果无向图是强连通的,则称其为连通的(connected).给定两个有向图或无向图该=(V, E)和〔G'=(V', E,),如果V C V, E' C E,则称图是图(G的一个子图(subgraph).如果子图G'的顶点集满足 V;= V,则称1G是图(G的一个生成子图(spanning subgraph);所谓有向树(directed tr e e),它是一个有向图,其中一个节点它没有父节点但到其他任意节点都存在有向路径.所谓有向生成树(directed spanning tree),它是图的一个子图(subgraph),是有向树,并且其节点集合与图的节点集合相同,且满 足以下性质:⑴具有一个没有父节点的特殊节点,称为根节点(root vertex); (2)0根节点外,其他的节点有且只有一个父节点;(3)根节点可以通过有向路径连接到其他任一节点.若矩阵的所有元素都是非负的,则称该矩阵为非负矩阵(nonnegative matix). 一个加权图(weighted graph) G(A)是由图〔S和非负矩阵A =[aij] G R n x n组成的,且满足(Vi,Vj) G E当且仅当aij >0. A称为图G的加权邻接矩阵(weighted adjacency matrix), a^称为边(¾,Vj)的权.若矩阵A中的元素是0或1,则称G(A)为非加权图(unweighted graph),即〔S(A)描述了图〔S的拓扑结构.对于无向加权图,A是对称矩阵,即A=A t.给定图(S(A),如果E aij=aji, i= 1,…,n,则称(S(A)为平衡图.显然,任意无向图都是平衡图.图的Laplacian矩阵是代数图论中的一个重要研宄对象,它不仅是刻画图的性质的一个重要工具又是证明多智能体系统是否收敛的基础.给定图G(A),其Laplacian矩阵L =知']G R nxn按下面方式定义:{—ai j,i =j,nE a 认,i = j.k=1,k=i§2.2主要定义与引理以下给出在下面研宄过程中所需要的一些定义和引理.定义2.1 [39]若矩阵M G R n xm的所有元素都是非负的,则称M为非负矩阵,记为M y0;并且M y N表示M —N为非负矩阵.定义 2.2 [39] 若M是非负矩阵并且行和是1, 则称M为(行)随机矩阵;更进一步地,若存在某一列向量C,使得lim M k=1nCT,则称矩阵M是遍历的.k^^定义2.3 [60]设B=(bij) G C n x n是n阶复矩阵,在复平面上,称集合G i(B) ={z G C I|z—b ii||b ij I=R i}, i =1, 2, ••• , n 为矩阵B的第ij=i个Gerschgorin圆,简称盖尔圆,其中Ri=E |b ij|, i =1,2,…,n称其为盖尔圆j=iG i的半径.第二章预备知识Sii Si2 Sf2S22其中引理2.1 [43] (Schur complement)给定对称矩阵夕=Sn G R rxr,则下列条件是等价的(I) S <0,(II) Sn <0, S22 - S g S n i Sn <0,(III) S22<0,Sii - Si2S2-2l ST2<0.引理2.2 [39]如果矩阵B是随机矩阵,1是B的单根且其它特征根位于单位圆内,那么B是遍历的.即lim B m =1…v T,其中v是B的关于特征根1的左特征向量,即vTB =vT,并且v T1n =1.引理2.3 [60](盖尔定理)矩阵B=(bij) G C n x n的一切特征根都在它的n 个盖尔圆的并集之内.引理2.4 [59] —阶多智能体系统而(k +1) =$Xi(k) 一致可达当且仅当1是矩阵$的代数重数为1的特征根,且其它特征根全位于单位圆内.引理 2.5 [59] (Hermite-Biehler Theorem)多项式r(a)=an + pian-i + …+ Pn-i^+P n,其中Pj G C,j=1, 2,…,n.将O=iu代入上式,得r(i u)= m(u) +i n(u).多项式r(a)是H urw itz稳定的当且仅当m(w),n(w)是环绕交织 的且m(0)n'(0) -mf(0)n(0) >0.引理2.6 [57] 二阶复系数多项式g(s)=s2+(糾+i v i)s + ^o +i v o,其中iM,v i,iM i和v o是实数,则有g(s)是H u rw itz稳定的当且仅当im >0和^ivivo + ^i^o - V2>0成立.引理2.7 [56]给定一个拓扑图G,则图G含有有向生成树当且仅当图(S的Laplacian矩阵有且只有一个0特征根,并且其它非零特征根都具有正实部.引理2.8给定四个正实数a,b,c,d.若g<d,则 C <^;若>T,a -b b a b a - b bc d则—>T.a bG R2nxn,定义Z(ifc)引理2.9 [60] 对任意矩阵Z>0和N=X(ik+i) - X(i k), ^(i k) =[XT(i k) XT(if c-i)]T,则有-Z T(ik-i)Z Z(ik-i) <C t(ik)N Z-i N T^(ik) +2f(ik)N Z(ik-i).第三章网络化控制系统的分析与建模§3.1 引言在网络化控制系统的研宄中,系统所要达到的稳定状态一直以来都备受人们的关注.而网络的限制引起的时延问题和丢包问题是影响系统达到稳定状态的重要原因.近年来吸引了许多学者对其进行研宄并取得了丰富的研宄成果.与已存在的论文相比,本论文主要突出点有:(1)对同时带有网络诱导时延和数据包丢失的网络化控制系统进行分析和建模;(2)引入了有效采样数据包的概念,且假设执行器是分时驱动的,与时间驱动相比此假设能够保证执行器及时地接收到系统的最新的信息.不再假设时延大于(小于)一个采样周期;(3)网络化控制系统被建模成为一类新的切换系统,此类切换系统带有双重切换信号I(im)和^(im),其中1(i m)是由网络中的时延决定的,n(im)是由系统中的丢包过程决定的.这就意味着需要运用存在的切换系统理论或者研宄出新的切换系统理论来使得新的切换系统达到稳定.§3.2问题描述本章中所采用的模型如下:图3.1:网络化控制系统模型图通信网络仅存在于传感器和控制器之间,而控制器与执行器之间不存在网络,通信连接是理想状态.该系统的被控对象动态如下i⑷=A x(t)+u(t)=K x(t),其中;r(t) G R n表示系统的状态,u(t) G R m表示控制输入,A和B是具有适当的维数的矩阵,K G Rmxn是需要设计的反馈增益.为便于研宄,给出如下假设:假设3.1假设系统中的传感器为时间驱动且采样周期为h.控制器为分时驱动且连接着一个缓存器,用来保存从传感器传来的最新数据包.控制器定时的从缓存器中读取数据,并且读取周期要小于传感器的采样周期,如本章采用•.执行器为事件驱动.2假设3.2假设系统中的数据包是以单包传输的.假设3.3假设系统的连续丢包上界为d —1,d=1,2, •••.用來、表示控制器读取第i m个数据包的时刻,Tim表示第i m个采样数据包的时延.则有n(im) =k h,k =I,2,….为简化模型,引入有效采样数据包概念.定义 3.1 有效采样数据包是指网络诱导时延小于两个采样周期,且作用于被控对象的数据包.用符号S:= {io, ii, i2,…,im,…}[{0,1,2,…}表示有效采样数据包的时间序列集.例如假设时间序列集S := {2, 4, 7, •••},则表示第{i|i =2,4, 7, •••} 个数据包是有效数据包,而第Ij =1, 3, 5,6, •••}个数据包是无效数据包.本章只考虑网络诱导时延T小于等于2h的采样数据包,即执行器会自动放弃时延大于2h的数据包,而继续采用之前的数据包,为简化模型,不妨假设切=0.定义 3.2 丢包过程定义为n(im) :— im+1— iT O o im G S, (3.2)其中^(Zm)取值于有限集合Id :={1,2,…,d}.若n(.)在集合I d中取值是任意的,则丢包过程(3.2)为任意丢包;若n(.)的取值是一个离散的M arkov链,且已知其概率转移矩阵n =[nij]dxd G(H, F,P), 则系统的丢包过程服从M arkov过程.令Aij =P r{n(im+i) =j|n(im) =i},则有E Aij=1,y G Xi.j=i在下面研宄中,为方便表示,简记:F = eAh,G =/0 eAsdsB,G i =f h eAsdsB, G2=fO eAsdsB,x(k) := x(kh), u(k) := u(kh).用实心圆♦表示有效采样数据包空心圆O表示丢失的采样数据包折线」表示系统信号基于假设3.1.1 - 3.1.3,利用反复迭代方法,网络化控制系统模型讨论如下情况1."(im)情况2.+1im +2im +3im+1情况3.x(im)+1im +2im +3im+1-I-----------------------^---------------------L_+1+2+3im+1情况5.+1^m +2^m +3im+1情况6.ii .,) x(im)「\----------A--1+1^m +2^m +3im+1情况7.x(im-1)-I-----------------------^---------------------L_+1im +2im +3im+1 mmmmmm情况9.情况10._i--------^-------1------------------------------------------------------------------i m 十丄i m + 2i m + 3i m +iX (Z m -l ^ ,一^ 一^x W ----------------------------------------------------------^—I -------------6------------1------------^-----------------------.-Zmirm + 1 irm + 2 irm + 3 i m +i情况1.图3.2: 系统的信号图Tim= 0,在这种情况下,第i m 有效采样数据包时延为0.即假设 网络化控制系统的连接为理想状态,这种“理想状态”是合理的.如在网络负 荷比较低的情况下,一些网络控制系统的性能十分好,能够被看作理想状态,故 u(t) = K x (i m),t G [imh, im+ih ).相应的系统的动态方程变为X (hm -i) ,[imh,(im ^)h),情况 2. T im G (0,h ],则U(t) ={. I 2则通K x W m ^,t G [(im + 2)h ,im+ih ).n (im )-i\礼十i) = I F n (im ) + ^ F kG K I x (im).,I K x (i m-i ), t G [imh, (im + 12 u(t) I ,过迭代算法可得(n (im )-2 \F n (im ) + F n(im)-iG 2K + ^ F kG K j x (i.)+F n(im ')-i G l K x (i m-l ).h h情况3. Tim G ("2, h ]且兀(im) - n (im -i) > "2.从而"、I K x (im-1), t G [imh,(im + 1)h),u(t) = \K x (i m) I t G [(im + 1)h ,im+ih ).则mx n(im )-2(im+1) = I F n(im ) + ^ F kG K I x(im) + F n(im)-1G K x (im -1).k=0情况4. Tim Gu(t)和兀(im) -n(im-K x (im -2),,t GK x (i m-1),,t G K x (i m),x (im h 2从而1m2mt G [(im + l )h , im+1h ).则有n(im )-2x(im+1) = I F n (im ) + J ] F k G K I x(im) + F n(im)-1G 2K x (im -1) + F n(im)-1G 1K x (im -2).3h 3h 情况5. Tim G (h,]和兀(im) — n (im-1) ^ .从而3K x (im-1) , t G Pm , (im + 7T)h)u(t)32则有x (im+1)K x (im) ,t G [(im + "^h, im+1h ).n(im)-3F n (im ) + F n (im )-2G 2K +F kG K j x (im)k =0(F n(im)-1G K + F n(im)-2G 1K ) x(im -1)3h情况6. Tim G (h ^ —-]和兀(im )-兀(im -1) = h .从而则有u(t)K x (im -2), t G [im , (im + 美)h)t G [(im +2K x (i m) ,t G [(im + 2)", im+1h ).n(im )-3x(im+1) =I F 偏 + F n(im)-2G 2K + E F kG K I x(im)(F n(im)-1G 2K + F n(im)-2G 1K ) x(im -1) + F n(im)-1G 1K x (im -2)2m21。
网络化控制系统的预测控制算法研究随着信息技术的快速发展,网络化控制系统在各个领域中得到了广泛的应用。
网络化控制系统是指通过网络连接的传感器、执行器和控制器组成的控制系统,它具有分布式、开放性和跨网络的特点。
然而,网络化控制系统的延迟、不确定性和数据丢失等问题给系统的控制性能带来了挑战。
为了解决这些问题,预测控制算法成为了网络化控制系统的研究热点之一。
预测控制算法通过利用系统的数学模型和实时测量数据,预测未来的系统状态,并根据预测结果进行控制决策。
它可以通过预测未来的系统状态来补偿网络延迟,减小不确定性的影响,并提高系统的控制性能。
预测控制算法可以分为基于模型和无模型的方法。
基于模型的预测控制算法需要事先建立系统的数学模型,并根据模型进行预测和控制。
这种方法具有较高的精度和鲁棒性,但对于复杂系统的建模较为困难。
而无模型的预测控制算法则不需要事先建立系统的数学模型,直接利用实时测量数据进行预测和控制。
这种方法具有较低的计算复杂度和较强的适应性,但预测精度较低。
近年来,研究者们提出了许多改进的预测控制算法,以提高网络化控制系统的控制性能。
例如,基于深度学习的预测控制算法可以通过神经网络模型自动学习系统的动态特性,从而提高预测精度。
此外,基于模型的预测控制算法也可以结合无模型的方法,通过在线辨识和参数估计来更新系统的模型,减小建模误差的影响。
然而,网络化控制系统的预测控制算法仍然面临一些挑战。
首先,网络传输的延迟和丢包会导致预测结果的不准确性,从而影响系统的控制性能。
其次,网络中存在的不确定性和故障也会对预测控制算法的稳定性和鲁棒性造成影响。
因此,今后的研究需要进一步改进预测控制算法,以应对这些挑战。
综上所述,网络化控制系统的预测控制算法是提高系统控制性能的重要手段。
通过预测未来的系统状态,预测控制算法可以补偿网络延迟和减小不确定性的影响,从而提高系统的稳定性和鲁棒性。
未来的研究应该继续改进算法的预测精度和适应性,以满足不同领域中网络化控制系统的需求。

总669期第七期2019年3月河南科技Henan Science and Technology 网络化控制系统研究综述琚垚(新乡职业技术学院,河南新乡453000)摘要:进入21世纪以来,互联网技术得到了空前发展,与互联网技术结合的控制系统理论及应用逐渐成为学术界关注的重点。
基于此,本文梳理了网络化控制系统研究历程,分析了该领域的研究现状,探讨了网络化控制系统的模型设立、评估状态、信息迟滞、设计算法、通信约束等,并对下一步研究方向做了一定展望。
关键词:网络化控制系统;工业以太网;时延;调度中图分类号:TP273.5文献标识码:A 文章编号:1003-5168(2019)07-0022-03Review of Networked Control SystemsJU Yao (Xinxiang Vocational and Technical College ,Xinxiang Henan 453000)Abstract:With the advent of the Internet era ,the theory and applicationof networked control system has gradually become the focus of research.Therefore,This paper introduced the development history of networked control system,reviewed the current research situation in its field,and discussed the model establishment,evaluation status,informa⁃tion hysteresis,design algorithm,communication constraints of networked control system,and looked forward to its fu⁃ture research direction.Keywords:networked control system ;industrial ethernet ;delay ;scheduling网络化控制系统的英文简称NCS ,是在闭环网络环境下的自动反应控制系统。
网络化控制系统研究综述_692网络化控制系统研究综述摘要:综述了网络化控制系统的研究现状,阐述了国内外学者从控制和信息调度角度对网络化控制系统进行稳定性分析、控制器设计、状态估计器设计以及基于模型的故障诊断和容错控制等方面的研究进展;在此基础上分析了网络化控制系统亟待解决的问题并展望了以后的研究方向。
关键词:网络化控制系统;稳定性分析;控制器设计;调度;故障诊断Survey on Status of Networked Control SystemsZHANG Wen-xia YUAN JianAbstract: The state- of- arts of NCS (Networked Control Systems) is surveyed firstly, and then some advances onstability, controller design, state estimator, and model- basedfault-diagnosis and fault-tolerant control and so on from control and scheduling are introduced in this paper. Last the demanding problems on NCS and future research fields are provided. Keywords: Networked Control Systems; stability analysis;controller design; scheduling; fault diagnosis1 引言网络化控制系统NCS(Networked Control Systems),又称集成通讯与控制系统ICCS(Integrated Communication and Control System),最早可见于Ray A.等人发表的论文中。
网络控制系统文献综述1.概述随着电子计算机和网络通信技术的发展以及控制和管理要求的不断提高,使得控制系统正由封闭的集中体系加速向开放分布式体系发展。
从控制系统的出现就生了控制信息交流和共享的问题。
由于技术上的限制,控制系统早期采取一种封闭结构,这同计算机技术发展早期相似;而且控制系统网络化发展(如图1)也跟计算机网络的发展进程有某种相似的对应关系。
在计算机控制系统的发展过程中,每一种结构的控制系统的出现总是滞后于相应计算机技术的发展[1]。
实际上,大多数情况下,正是在计算机领域一种新技术出现以后,人们才开始研究如何将这种新技术应用于控制领域。
进入21世纪,自动化与工业控制技术需要更深层次的渗透通信与网络技术。
一方面,现代工厂与智能设备传感器、控制器、执行器分布在不同的空间,其间的通信需要数据通讯网络来实现,这是网络环境下典型的控制系统[2](如图2)。
另一方面,通信网络的管理与控制也要求更多的采用控制理论与策略。
集中式控制系统和集散式控制系统都有一些共同的缺点,即随着现场设备的增加,系统布线十分复杂,成本大大提高,抗干扰性较差、灵活性不够、扩展不方便等。
为了从根本上解决这些问题,必须采用分布式控制系统来取代独立控制系统。
分布式控制系统就是将控制功能下放到现场节点,不需要一个中央控制单元来集中控制和操作, 通过智能现场设备来完成控制和通信任务。
分布式控制系统可以分为现场总线控制系统和网络控制系统,前者可以看作是后者的初级阶段[3]。
从网络结构上来说, NCS和FCS并没有区别, 都是总线网络,多个节点共享信道,用来传输实时或非实时数据;但从定义上看, FCS侧重的是节点之间实时或非实时数据的传输和共享,而NCS则强调在通信网络上建立闭环控制回路,从这一点上看, NCS 中的网络是一个广义的范畴,包括了FCS,但不局限于FCS,还可以包括工业以太网、无线通信网络、甚至Internet,这也是与网络技术的发展相适应的。
网络化智能控制系统随着科技的不断发展和进步,智能化技术在各个领域中得到广泛应用,尤其是在控制系统领域。
网络化智能控制系统作为一种新兴的技术,以其高效、智能和灵活的特点,正在逐渐取代传统的控制系统,并成为各个行业的首选。
一、网络化智能控制系统的概述网络化智能控制系统是指利用现代网络技术和智能化算法,将传感器、执行器、控制设备等各个部分连接起来,通过网络进行数据传输和信息交互,实现对系统的远程监测和控制。
它不仅能够准确地感知环境的变化,还能根据数据和算法自主地做出决策和调整,提高系统的自适应性和智能化水平。
二、网络化智能控制系统的特点1. 高效性:网络化智能控制系统能够实现设备之间的高效沟通和信息交互,提高了系统的工作效率和响应速度。
2. 智能化:通过智能算法和数据分析,网络化智能控制系统能够对环境变化做出准确判断,并自主地做出相应的调整和决策。
3. 灵活性:网络化智能控制系统不受地域和时间的限制,可以实现对系统的远程监测和控制,提高了系统的灵活性和可操作性。
4. 可靠性:网络化智能控制系统通过多传感器和多执行器的连接,确保了系统的稳定性和可靠性,减少了系统故障的概率。
5. 可扩展性:网络化智能控制系统可以根据不同的需求进行扩展和升级,适应不同规模和复杂度的控制系统。
三、网络化智能控制系统的应用领域1. 工业领域:网络化智能控制系统广泛应用于工业生产过程中的自动化控制系统,实现对生产设备和生产过程的远程监测和控制,提高了生产效率和产品质量。
2. 建筑领域:网络化智能控制系统可以实现对建筑内部的照明、空调、安防等设备的智能控制与管理,提高建筑物的能源利用效率和安全性。
3. 公共交通领域:网络化智能控制系统广泛应用于公共交通系统中,如智能交通信号控制系统、智能公交调度系统等,提高了交通系统的运行效率和交通流量的控制。
4. 农业领域:网络化智能控制系统可应用于温室大棚的环境控制和农田灌溉系统的智能化管理,提高了农作物的产量和质量。
第39卷第2期自动化学报Vol.39,No.2 2013年2月ACTA AUTOMATICA SINICA February,2013网络控制系统的最新研究综述游科友1谢立华2摘要随着传感、信号处理和通信技术的快速发展,关于网络控制系统(Networked control systems,NCSs)的研究引起了极大的关注.本文拟回顾关于网络控制系统的最新研究进展.为揭示反馈通信网络对控制系统的影响,主要讨论了为满足不同控制目的所需的各种网络条件,例如:在时变信道的环境下,保证线性系统可镇定性所需的最低编码率;在间断观测的环境下,保证卡尔曼滤波器稳定性的临界丢包条件;在时不变连接图的环境下,达到线性多自主体系统趋同性所需的网络拓扑结构;在通信资源有限的情况下,基于事件驱动的采样与控制方法等.关键词网络控制系统,线性系统,数据率,丢包,事件驱动控制,趋同性引用格式游科友,谢立华.网络控制系统的最新研究综述.自动化学报,2013,39(2):101−118DOI10.3724/SP.J.1004.2013.00101Survey of Recent Progress in Networked Control SystemsYOU Ke-You1XIE Li-Hua2Abstract With the rapid development of sensing,information processing,and communication technologies,the research in the emerging area of networked control systems(NCS)has attracted considerable attention in the research community. The purpose of this survey is to provide a review of state-of-the-art of such research.We particularly discuss various network conditions required for different control purposes,such as the minimum rate coding for stabilizability of linear systems in the presence of time-varying channel capacity,the critical packet loss rate for the stability of the Kalmanfilter with intermittent observations,network topology for coordination of networked multi-agent systems,as well as event-driven sampling for energy and communication efficiency.The common goal of discussion on these topics is to reveal the effect of the communication network on the operation of the networked systems.Key words Networked control systems,linear systems,data rate,packet loss,event-based control,consensusCitation Ke-You You,Li-Hua Xie.Survey of recent progress in networked control systems.Acta Automatica Sinica, 2013,39(2):101−118网络控制系统(Networked control systems, NCS)是由通信网络组成闭环回路的空间分布式控制系统,如图1所示.通信网络是为了连接分布在不同空间位置上的组成单元,如执行器、传感器和控制器.这种特性使其易用于设计大规模系统,而且NCS相对于传统控制系统有较低的安装费用、易于系统维修与保养等优势.NCS的重要应用包括传感器网络、工业控制网络、多自主体的协调控制和微机电系统(Micro electro mechanical systems,收稿日期2012-10-31录用日期2012-11-08Manuscript received October31,2012;accepted November8, 2012国家自然科学基金(61120106011)资助Supported by National Natural Science Foundation of China (61120106011)本文为黄琳院士约稿Recommended by Academician HUANG Lin1.清华大学自动化系北京100084,中国2.南洋理工大学电气与电子工程学院新加坡639798,新加坡1.Department of Automation,Tsinghua University,Beijing 100084,China2.EXQUISITUS,Centre for E-City,School of Electrical and Electronic Engineering,Nanyang Technological University,Singapore639798,Singapore该文的英文版同时发表在Acta Automatica Sinica,vol.39,no.2, pp.101−118,2013.MEMS)[1],其共同目的是通过部署共享网络进行数据交换来控制一个或者多个回路系统.从系统生物学的角度,基因调控网络也可认为是一个NCS.它是由相互作用的基因和与其关联的蛋白质组成的网络系统.图1NCS的结构Fig.1General NCS architecture控制和通信的相互作用使得在控制闭环回路中加入通信网络的NCS的分析和设计变得复杂.基于通信网络的控制系统给通信、信号处理和控制等技术提出了新的挑战.近年来,许多文献对此进行了深入的研究,并主要集中于诸如数字反馈信道所需最102自动化学报39卷低通信数据率(Communication data rate)、损失信道(Lossy channel)的丢包条件、线性多自主体系统趋同所需的网络拓扑结构、基于事件驱动的网络系统控制方法等问题.它们统称为基于网络的控制,也被确定为控制领域的关键研究方向之一[2].本综述分别介绍基于信息、网络、图论和采样理论的网络控制系统的研究方法.1综述概要本文将主要讨论NCS领域中需要重点考虑的问题.第2节将分析NCS所采用的网络的特性,因为NCS的控制设计主要受网络类型的影响.第3节将简短地回顾系统控制技术演变的历史.通过本节能够清晰地了解到控制系统中使用的传感与计算技术如何影响控制设计的发展,如数字计算机的出现和使用促使研究者去探索数字控制技术.类似的,网络在反馈回路中的应用不但促进了NCS 的研究,而且使得发展大规模分布式控制系统变得可行.第4节将分别讨论在无噪和有噪反馈信道下镇定线性系统所需的最低通信数据率问题.其中,对有噪信道的情形,主要关注具有随机丢包的网络.我们将应用信息论的方法建立对应的数据率定理.第5节将应用网络理论的方法建立在随机丢包情况下保证卡尔曼滤波器的稳定性的充要条件,并且提出随机采样方法来处理丢包过程的相关性.第6节将讨论线性多自主体系统的趋同控制.其目的是为揭示在常用的控制协议下,自主体的动态特性和网络拓扑结构对多自主体系统趋同的影响.第7节将简单介绍基于事件驱动的多自主体系统的趋同控制问题.该方法的优点在于能够减少信号传输次数,和减低对通信网络的要求.第8节总结了全文,并提出了几个需要进一步研究的课题.2通信网络的局限性NCS的优点在于闭环回路中使用网络来达到远程控制的目的.但是,网络的物理局限性也影响了NCS的控制性能.因此,了解NCS中使用的网络是有必要的.现有NCS的通信网络包括DeviceNet[3], Ethernet[4],FireWire[5]等.NCS的性能很大程度上受网络特性如网络的有限数据传输率、延时、数据丢包等的影响.任何的通信网络信道在单位时间内只能传输有限的信息.因此,在网络控制中,系统的组成单元之间在单位时间内也只能交换有限的信息.但使用非常粗糙的反馈信息可能给NCS的稳定性及控制性能带来极大的影响.例如,在微机电系统阵列的单芯片中,可具有104∼106个执行器或传感器,应考虑如何通过无线链路如BluetoothTM或IEEE 802.11(b)来形成反馈回路和使用反馈网络协议如CAN[1].尽管单位时间内总的信息传输量(如比特数)可能较大,但有效分配到每个回路的传输量只是很少的一部分[6].利用数字网络来传输信号,需先对信号进行采样,并编码成二进制序列,再经网络传输至另一端,最后在接收端对接收到的信号进行解码.时变的网络环境(如拥塞)和信道质量将导致采样和解码之间存在变化的时延,如媒体存取延时(网络接收信道的输入数据所耗费的时间)[7]和传输延时(数据在网络中传播的时间).在反馈控制系统中,延时是我们关心的主要问题之一.此外,外界环境的变化(如随机出现大金属物体)将不可避免地影响通信信道的传播质量,甚至阻断该通信链路.因此,数据在网络传输过程中可能存在丢失现象,这在无线链路中更为常见,特别是对于通信资源有限(如能量有限)的无线链路.由于较大的时延,接收端收到的数据可能已过时,有时这也被认为是数据丢失.本质上,这说明了某些可靠的网络传输协议(如TCP)并不适合NCS,因为过时的数据在实时控制中的作用通常是有限的.通信网络在闭环控制回路引起的其他问题还包括传输错误、信息保密、网络安全等.这些因素将不可避免地降低NCS的控制性能,甚至导致系统不稳定.3控制技术的简要发展史早在上个世纪50年代,由于数字计算机作为反馈控制的运行平台,研究的重心从传统的反馈控制[8]转移到数字控制技术[9].这要求从连续时间/连续状态转变到离散时间/离散状态的控制模型.因而,在数字控制中需要额外考虑的问题包括有效的采样机制、有限字长和相位滞后补偿.至今,数字控制技术已相对成熟[10].然而,使用空间分布式的结构来控制一个或更多的动态系统加快了新的控制技术的发展,如化工工程和电力系统.过去,这些系统的组成部件是通过点对点的有线连接联系在一起,且系统的设计需要所有传感器的信息.这种集中式的点对点系统并不能满足如模块化、分散控制、综合诊断、快速和易维修、成本低等的需求[11].随着传感和通信技术的发展,我们可以在传感器内嵌入低成本的微处理器,且传感器之间可以通过共享数字网络或无线信道来交换信息.具有这样架构的控制系统并不需要传统方2期游科友等:网络控制系统的最新研究综述103法所需的中央控制单元.NCS的研究主要受闭环回路中使用的网络类型所影响.经过广泛的研究和发展,一些为工业控制的网络协议已被采纳.例如,控制器区域网络(Controller area network,CAN)是德国罗伯特博世(Robert Bosch)公司在1983年为汽车行业所开发的[12].另一个工业网络PROFIBUS是在1987年由六家德国公司和五家德国的研究所共同开发[13].大约在同一时期,许多其他的工业网络协议如现场总线(Foundationfieldbus)和设备网(DeviceNet)等相继出现.这些工业网络可以通过减少布线和加强分布式智能的方法来提高NCS的效率、灵活性和可靠性.从而降低安装费用、重复配置和维护时间等成本.因此,许多在欧洲制造的汽车通过集成CAN都引入了嵌入式系统.近年来,整合设备的发展趋势从有线通信到无线通信.虽然无线网的使用增强了系统的灵活性,但一旦采用了无线网络,信道将变得更加不可预测,其可靠性和通信时效性就成为一大问题.因此就无法假定接收到的数据是准确的、及时的和完整的.从有线到无线的通信信道的转变突出了重要的潜在应用优势,但也引入了一些目前关于NCS研究的挑战性问题.NCS的另一个重要优势在于分布式控制.这归功于低成本但功能较强大的数据处理器,从而使传感器的数据能就近处理.通常情况下,分布式控制是利用局部的反馈信息来控制和协调多个子系统.所以,若通信网络不存在如延时和丢包等的局限性,直观上分布式控制性能不如集中式控制.但在实际网络控制中,分布式控制比集中式控制更具有鲁棒性、扩展性(Scalability)、安全性等优点.多架无人机(Unmanned aerial vehicles,UAVs)的编队就是一个典型的分布式控制系统.在高速飞行中,无人机之间的通信变得十分困难.同时,这也要求设计计算简便的分布式控制策略.总而言之,NCS的出现促使我们综合地考虑控制、通信和计算技术.传统控制理论只考虑如何利用反馈信息来达到某特定的控制目标.通常忽略通信对控制的影响.而通信理论主要考虑如何把信息从一端可靠地传输到另一端,但忽略传输信息的用途.这导致在过去,控制和通信的研究并没有太多的交叉点.NCS的分析与设计必须综合利用控制和通信理论.4基于信息论的控制方法4.1基于无噪数字信道的线性系统的镇定问题现有关于NCS的量化状态反馈控制的研究主要集中在如图2所示的系统结构.确切地说,考虑n 维离散时间系统:x k+1=Ax k+Bu k(1)其中,x k∈R n是系统的状态,u k∈R m是控制输入,且(A,B)是可镇定的.图2量化反馈控制系统Fig.2Quantized feedback controlNCS的显著特性是控制器和被控对象间的信息传递是由通信网络来实现.由于通信网络单次只能传输有限比特数的信息,所以连续取值的状态x k在传输前必须离散化.为此,利用量化器Q k:R n→S k把状态x k映射到可数集合S k中的某个元素s k,且量化器的输出再编码成可用于通信传输的二进制列.在信道的另一端,解码器收到信道输出并恢复x k.基于状态估计ˆx k,控制器产生控制输入信号并作用到被控对象.在整个过程中,量化器把连续取值的状态变量离散化(如四舍五入),故存在量化误差,即通常x k−ˆx k=0.很明显,量化器是一非线性算子.一个根本问题是如何刻画量化误差对系统的影响.直观上,若通信数据率越低,即S k的元素个数越少,量化误差越大;反之亦然.如果量化误差太大,控制器了解到系统的信息越少,以致于可能无法镇定该系统.量化反馈控制的研究并不是一个新课题.事实上,自1956年来一直是重要的研究领域[14].在文献[14]中,Kalman研究了量化对采样系统的影响.早先研究量化反馈控制主要是受实现控制系统的数字电脑所影响.特别地,Kalman[14]指出如果一个稳定的控制输入信号经有限字长的量化,则反馈系统会表现出极限环(Limit cycles)和混沌(Chaos)行为.因有限字长的微处理器引起的量化分辨率相对较高,即量化误差较小,早期大部分关于数字控制的工作都集中在减少量化的影响[15−16].他们共同的方法是将量化误差建模为一加性随机噪声.从而,可以借用随机系统的研究方法.然而,上述观点在某些新的应用环境中被质疑.如在无线传感器网络中,为了节省能量,通常只能允许传播非常粗糙的量化信息.相应的工作可以追溯到文献[17].该文作者将量化输出理解为观测到被量化对象的部分信息,并证明了历史量化输出数据的重要性.特别的,利用量化反馈信息来镇定开环不稳定线性系统存在最低的通信数据率.也就是说,如果通信数据率低于一定的值,则不能构造编码/解码104自动化学报39卷和控制器来镇定开环不稳定系统.自那时起,已发展了多种研究量化反馈的控制方法.量化反馈的研究可基于量化器是否是静态或动态来划分.静态量化器的量化层数(Quantizationlevel)固定且无记忆,而动态量化器具有记忆性,但更复杂,潜在的功能也更强大.对数量化器是最有趣的静态量化器之一,其量化层数以指数形式增长且相对量化误差一致有界.事实上,对数量化器是二次镇定意义下镇定不稳定线性系统的最粗糙量化器[18],且最粗糙的量化密度ρ可显式地由开环系统的不稳定极点来表示.这里,量化器Q(·)的量化密度由下式给出:ρ=lim→0+inf#Q[ ]−ln其中,#Q[ ]表示量化器Q(·)落在区间[ ,1/ ]上的量化层数.文献[19]为研究对数量化器对量化反馈控制系统的影响,提出了一种扇形界方法(Sector bound method).该方法把量化误差理解为在扇形界内的非线性时变扰动,揭示了扇形界方法是研究二次镇定意义下基于量化反馈镇定不稳定系统的方法.基于此,鲁棒绝对稳定性(Absolute stability)理论[20]等分析工具可用于研究量化的影响.由于时不变性的特点,无记忆性的量化器需要无限量化层数来保证量化反馈系统的渐近稳定性.但在有限量化层数的情况下,量化误差将无法消除,则只能得到实用稳定性(Practical stability)[21],即闭环系统的状态被控制在状态空间的某个有界子集内.但可以利用动态缩放的方法使该子集变得任意小.这促使我们去设计有限量化层数的动态量化器[22−25].Brockett等[25]研究线性系统基于有限量化层数的动态均匀量化器的可镇定性问题,并指出存在对量化精度的动态调整策略和相应的量化状态反馈控制律来镇定开环不稳定的线性系统.因量化层数由信道的通信数据率来决定,这就提出了一个基本问题:量化和控制器之间需要传输多大的信息量才能镇定开环不稳定的线性系统?基于不同的问题背景,多位研究者对此问题进行了研究[24,26−30].确切地说,记µk为量化器Q k的输出个数,即µk表示集合S k的势.显然,这需要 log2µk 比特长的存储单元来表示量化器的输出.则平均数据率(记为R)由下式给出:R=limk→∞inf1kki=1log2µi比特/样本数据率定理是说为达到量化反馈线性系统的渐近稳定性,平均通信数据率必须严格大于一下界,即R>ni=1max{0,log2|λi|}=H(A)(2)上式中,λ1,···,λn表示矩阵A的所有特征根.如果R>H(A),则可以设计动态量化器及其相应的控制律使得闭环量化反馈系统渐近稳定.注意,下界H(A)只取决于开环系统的不稳定极点,而不依赖于量化反馈信息的编码和解码方式,也与控制策略无关.很显然,该性质与著名的香农信道编码定理[31]十分相似.即为保证可靠(解码错误的概率任意小)地发送一信息源,信道的数据率必须严格大于信息的熵率(Entropy rate)[32].在文献中,H(A)通常用来描述线性系统不确定性的增长速率,并称为系统的拓扑熵(Topological entropy)[33].而通信数据率刻画了利用反馈信息来减少系统不确定的速率.为获得闭环系统的渐近稳定性,不确定性减少速率必须严格大于其增长速率.我们还注意到,不稳定极点越大,反馈回路就需要越大的数据率来保证闭环系统的渐近稳定性.这与我们的直观认识是一致的.上述结果是假设传输数据包的网络不存在信道不确定性.然而,经典通信理论中的有限信道容量定理不仅考虑了有限通信数据率的影响,也包含信道的延时、丢包等不确定性因素.许多相关的信息理论也是基于带噪声的信道模型.所以对NCS的分析和设计应考虑带有噪声的数字信道.对此问题的初步研究,在有噪信道下,保证线性系统可镇定性所需要最低通信数据率的问题吸引了研究者的广泛兴趣.但该问题的研究结果并不如无噪信道的情形成熟,因为不稳定状态变量之间的最优数据率分配与信道的不确定性相耦合,而且也取决于不同意义下的可镇定性概念[34−41].最近对此问题的研究也取得了一些重要的进展.4.2基于有噪数字信道的线性系统的镇定问题许多研究者将第4.1节的研究框架推广到有噪数字信道的模型.因存在信道的不确定性,解码器并不能准确接收到量化器的输出s k.这将进一步增大反馈信号的信息损失.相对于无噪信道,需要更大的数据率来弥补信道不确定性引起的信息损失.我们感兴趣的是需要多少额外的数据率去弥补由信道不确定性引起的信息损失,才能保证网络控制系统的可镇定性.虽然这个问题在2005年由Tatikonda 等[34]开始研究,但一般向量线性系统的情况至今仍未完全解决.在文献[34]中,作者声称如果信道的香农容量超过H(A),则对有随机外界干扰的线性系统可以几乎处处被控制在一个有界区域内[34].但文献[40]证明这一结果是错误的.相反,如果删除信道(Erasure channel)的删除概率不为零,则对存在2期游科友等:网络控制系统的最新研究综述105一致下界的外部干扰的不稳定线性系统,无论如何都不能利用量化反馈几乎处处被镇定.研究者对几乎处处可镇定的概念进行了更深层次的探讨[41−43].然而,对于基于有噪信道的线性系统的均方可镇定性,结果则大相径庭.这里,我们讨论Gilbert-Elliott信道模型[44],即信道的数据丢包过程由时齐马尔科夫过程[45]描述.确切地,我们用二元取值过程γk来表示接收端是否收到k时刻的数据包.若γk=1,则表示数据包成功发送到接收端,而γk=0,表示存在数据丢包.本文中的所有随机变量/向量都定义在统一的概率空间(Ω,F,P)上.Ω表示所有可能发生的事件集,F是定义在事件集Ω上的σ-域,P是在F的概率测度.马尔科夫过程的转移概率矩阵为(P{γk+1=j|γk=i})i,j∈S =1−q qp1−p(3)上式中,S={0,1}表示马尔科夫过程的状态集合.为避免出现显而易见的情形,假设失效率p和恢复率q严格大于0小于1.故马尔科夫过程是遍历的.显然,p越小q越大意味着通信网络更可靠.我们采用类TCP的网络协议[46],即存在反馈信道使得解码器能够发送ACK至编码器.因而,发送端可以了解控制器是否成功接收了在前一时刻发送的数据包.定义1.如果闭环系统满足limk→∞E[ x k 2]=0则称网络控制系统是均方可镇定的.其中,E[·]是基于概率测度P的数学期望算子.定理1[37−39].如果γk是一独立同分布过程,即p+q=1,则基于网络的线性标量系统(A=λ)达到均方可镇定性的充要条件为E|λ|222γk R<1(4)不等式(4)具有如下直观的解释.如果数据包在传输过程中丢失,则控制器没有收到任何系统的信息.解码器对系统状态的均方估计误差将以|λ|2的速率增长.如果数据包能够经信道成功发送,解码器的均方估计误差至少可以降低22R倍,其中R是信道每次传输的信息量(即比特数).如果在平均意义下,均方估计误差的增长速率|λ|2超过降低速率22γk R,则通过该信道传输的信息不足以补偿由系统自身动态特性引起的不确定性增长,故此量化反馈闭环系统不能达到均方稳定.如果不存在丢包现象,相应的γk=1.不等式(4)可简化为R>log2|λ|这与著名的数据率定理一致.令R→∞,则推出p<|λ|−2.这与基于网络丢包模型的结果一致[47−50].然而,将以上分析推广至一般向量线性系统,则要求通信数据率最优地分配给对应不同增长率的状态变量.为得到NCS均方可镇定性的必要条件,由熵–功率不等式[31]和式(4)可得:E|det(A u)|2n u22γk R n u<1(5)其中,A u∈R n u×n u是A的不稳定部分.因为对任何有界的控制输入,A的稳定部分对应的状态变量(向量)会自动均方收敛.如果传输的信息量能够镇定A的整个不稳定部分对应的状态空间,则很明显也能够镇定该空间的任何不变子空间.受此启发,也许可以推出更强的必要条件.由于不稳定部分对应的状态子空间存在相互作用,我们将其解耦成多个不稳定子系统.不失一般性,假设A=diag{J1,···,J u,A s},其中A s对应于A的稳定部分,J i是对应于A的不稳定特征根λi的实基本Jordan块[51].例如,若λi是实数,那么J i=λi1λi...λi(6)若λi=a i+b i i是复数,即b i=0,则令D(λi)=a ib i−b i a i,有:J i=D(λi)ID(λi)...D(λi)(7)对于任意子集S={u1,···,u s}⊂{1,···,u},定义J(S)=diag{J u1,···,J us},可以得到相应的解耦子系统:x(S)k+1=J(S)x(S)k+B(S)u(S)k(8)其中,x(S)k是对应于J(S)的不稳定状态变量(向量).注意到,如果x k通过信道传输的信息能被镇定,那106自动化学报39卷么x(S)k也能够利用相同的信息量被镇定.令n S=dim(x(S)k),则可得到如下更强的必要条件:E|det(J(S))|2n S22γk R n S<1,∀S⊂{1,···,u}(9)容易验证,如果没有丢包,即γk=1,则不等式(9)可简化为不等式(2).注意到,在建立必要性条件的编码策略并没有考虑随机丢包的影响,故可能不是充分的.事实上,可镇定系统的最优编码(利用最低通信数据率)策略,应考虑丢包的影响.直观上,“重要”的状态变量可能需要重复传输来降低在传输过程中的丢包概率.与无噪数字信道相比,考虑丢包影响的最优编码的设计也是最困难的部分.遗憾的是,此问题仍待解决.至于充分性,设计适应丢包过程的向量量化器具有挑战性.值得一提的是,对给定的任意随机向量,能否设计一个最优向量量化器使得均方量化误差最小还不得而知.目前的方法是通过设计标量量化器[37,39,52]来量化状态向量中的每一个不稳定变量.由于此方法不考虑状态变量之间的相关性,则不可避免地需要更高的数据率.该方法对每一个不稳定状态变量分配足够的数据率,并且将其动态变化过程视为一独立的标量系统.很明显,当丢包过程γk是一马尔科夫过程,则存在时间上的相关性.上文的方法将不再适用.为克服此困难,我们从另一个角度来理解具有丢包过程的网络控制问题.具体来说,如果k时刻存在数据包丢失,这相当于在该时刻没有进行采样.从这个角度,我们可得到一随机采样系统.记t k为控制器接收到第k个数据包的时刻.在数学上可表示为t1=inf{k|k≥1,γk=1}t2=inf{k|k>t1,γk=1}...t j=inf{k|k>t j−1,γk=1}(10)容易验证,第k个数据包接收的时间t k是一随机停时.由于存在数据丢包,t k通常不等于实际的采样时间k.不失一般性,令γ0=1和t0=0.定义逗留时间τk=t k−t k−1,可得到如下随机时变系统:x tk+1=Aτk+1x tk+ B U tk(11)其中, B=[B AB···Aτk+1−1B],且 U Tk =[u Tt k+1−1···u Tt k].对以上随机时变系统的研究通常需要τk 的统计信息.引理1[53].逗留时间τk是一独立同分布的随机过程,其概率分布函数为P{τ1=i}=1−p,i=1pq(1−q)i−2,i>1这个引理从某种意义上指出了如何处理具有时间相关性的马尔科夫丢包过程.由于篇幅有限,本文不加以论述.引理2[39].在马尔科夫丢包模型下,基于网络的标量系统(A=λ)的均方可镇定性的充要条件为E|λ|2τk22R<1(12)如果没有丢包现象,即τk=1,不等式(12)可简化为式(2).类似地,通过令p+q=1,不难验证不等式(12)可简化为式(4).直观上,上式表明数据率R 应该足够大才能克服在数据丢包的那段时间间隔里,系统状态变量的不确定性增长.对于随机采样系统(11),控制器在每个采样时间点t k总能接收到R比特的信息.但是开环矩阵Aτk是随机时变的.对于原始的离散时间系统(1),由于存在数据丢包,控制器收到的数据率是时变的.同样,推广到一般向量系统的难度也主要在于如何最优分配不稳定状态变量之间的数据率.在不同的可镇定意义下,基于有噪信道的线性系统可镇定性所需的最低数据率也不同.例如,基于删除信道的某些向量线性系统,保证几乎处处可镇定的充要条件是信道的香农容量必须严格大于系统的拓扑熵,即H(A)[34,40−41].但在其他可镇定的意义下,如矩可镇定性(Moment stabilization),该结论却不成立[36,54].注意到,上述关于量化器的设计只是分析了系统的可镇定性,并没有考虑量化反馈系统的控制性能.近年来,基于有噪数字信道的网络,Como等[55]提出了两种实值信号在任何时间可靠传输的编码策略,并刻画了编码策略及揭示了线性系统的收敛速率与计算复杂度的相互关系.在文献[56]中,通过量化新息过程,可以设计在渐近最小均方估计误差意义下的最优量化器.显然,为达到系统的最优性能,量化器与控制律需要综合设计.由于量化过程的非线性性,这类问题通常具有挑战性.这不仅因为量化器与控制器之间的相互影响,也因在不同的控制性能指标下,最优量化器–控制器可能完全不同.例如,在文献[18−19]中,为得到单输入线性系统的二次可镇定性,最粗糙的量化器是对数量化器.同时,对数量化器在最低数据率的意义下,也是镇定线性系统的最优量化器[22].尽管对数量化器被用来分析LQR和H∞最优控制问题[19],通常它也不是最优的,至少我们还不清楚其最优性.最优量化反馈控制。
网络化控制系统研究综述_692网络化控制系统研究综述摘要:综述了网络化控制系统的研究现状,阐述了国内外学者从控制和信息调度角度对网络化控制系统进行稳定性分析、控制器设计、状态估计器设计以及基于模型的故障诊断和容错控制等方面的研究进展;在此基础上分析了网络化控制系统亟待解决的问题并展望了以后的研究方向。
关键词:网络化控制系统;稳定性分析;控制器设计;调度;故障诊断Survey on Status of Networked Control SystemsZHANG Wen-xia YUAN JianAbstract: The state- of- arts of NCS (Networked Control Systems) is surveyed firstly, and then some advances onstability, controller design, state estimator, and model- basedfault-diagnosis and fault-tolerant control and so on from control and scheduling are introduced in this paper. Last the demanding problems on NCS and future research fields are provided. Keywords: Networked Control Systems; stability analysis;controller design; scheduling; fault diagnosis1 引言网络化控制系统NCS(Networked Control Systems),又称集成通讯与控制系统ICCS(Integrated Communication and Control System),最早可见于Ray A.等人发表的论文中。
一般认为ICCS是一种全分布式、网络化实时反馈控制系统,是将控制系统的传感器、控制器、执行器等单元通过通讯网络连接起来形成闭环的分布式控制系统。
其涵盖了两方面的内容:系统节点的分布化和控制回路的网络化。
这种网络化的控制模式具有信息资源能够共享、连接线数大大减少、易于扩展、易于维护等优点,但由于网络中的信息源很多,信息的传送药分时占用网络通讯资源,而网络的承载能力和通讯带宽有限,必然造成信息的冲撞、重传等现象的发生,使得数据在传输过程中不可避免地存在时延。
时延由于受到网络所采用的通讯协议、负载状况、网络速率以及数据包大小等情况到影响,呈现出或固定或随机,或有界或无界的特征,从而导致控制系统性能下降甚至不稳定,也给控制系统的分析和设计带来困难。
网络给NCS带来的主要问题包括:时延采样时刻和执行器响应时刻间出现了不可忽略的滞后;在某时间间隔内存在于时间相关的抖动;由于数据包在网络中传输发生丢失或冲突,导致时延增大甚至系统失稳。
NCS的性能不仅依赖于控制策略及控制律器的设计,而且受到网络通讯和网路资源的限制。
信息调度应尽可能避免网络中信息的冲突和拥塞现象的发生,从而大大提高网络化控制系统的服务性能。
大量的国内外文献从不同角度对网络控制系统的分析和设计以及信息调度等方面进行了研究。
2 问题描述NCS结构图可以用图1来表示,与传统的点对点控制系统比较,通讯网络给NCS系统带来的问题为:图1网络化控制系统结构图Fig. 1 A schematic diagram for an NCS1) 控制时延是某个采样时刻和对应的执行期响应时刻之差。
从控制的角度看,时延将导致向卫滞后,恶化系统性能,从信息调度的角度看,时延将使信息不能准时到达,丢失截止期,甚至带来不可预料的通讯多米诺效应。
2) 抖动是在任何特定的时间间隔,与时间相关的、突然的、乱真的变化,可以看成一种突发性的故障;表现为控制周期的抖动,时延抖动,采样抖动;从调度的角度看,抖动表现为输出抖动,队列抖动,截止期抖动等。
3) 瞬态误差是控制信号在网络中传输时发生丢失或冲突而产生的,会使数据和通讯时延加剧,时序采样值不能准时到达,产生空采样问题以及样本数据拒绝问题。
图 2 单回路控制系统结构示意图Fig. 3 structure chart of single-loop control system图 3 采样时序图Fig. 3 sample timing3 NCS的假设与模型针对网络的可变因素,目前的假设主要集中在以下方面:1) 驱动方式的假设传感器都是采用时间驱动,采样周期为,执行器和控制器存在时间驱动和事件驱动两种方式的组合。
2) 传输时延τ的假设通常假设τ为常数、随机分布,或有界或无界。
τ和T满足0<τ>T或。
3) NCS数据传输假设传输的每一数据包都是一个完整的数据,或者是数据被分成多个数据包,即单包和多包传输问题。
4) NCS数据丢包数据单元在传输中由于网络拥塞、中断等原因会导致数据包的时序错乱或数据包丢失等问题。
4 NCS研究现状NCS的研究涉及控制和通讯网络两个方面,对同一个问题既可以从控制角度来研究,也可以从信息调度角度来研究,或者综合两方面进行研究。
4.1 控制方法研究现状NCS中的控制时延主要包括:采样器和控制器之间的通讯时延;控制器和执行器之间的通讯时延,控制器的执行时间。
一般,可以将控制器的执行时间归入控制器和执行器之间的通讯时延,从而将上述三种时延简化为只有和。
最简单情形,假定和是恒定的,从而可以将问题转变为一般那的恒定时延控制问题进行研究。
通常采用的控制策略为:时间驱动的传感器和控制器,事件驱动的执行器。
Ray A等人最早讨论并研究了ICCS的建模、分析和设计问题,针对带有分布式网络诱导时延的ICCS,研究了其基于观测器的补偿器设计问题;并针对随机网络时延设计了其输出反馈控制器;Faik G等人同样也研究了由于网络的引入对控制系统性的影响。
Liou L W 和Ray A等针对随机ICCS研究了随机系统的调节器设计问题。
Lian Feng-li 针对通讯网络对控制系统的影响,对NCS进行了性能的分析以及建模和控制器设计等工作。
Wittenmark B和Nilsson J针对随机实时控制系统,对研究了其随机最优控制问题。
朱其新,胡寿松将其推广到时延大于采样周期的情形,并研究了网络化控制系统的随机状态估计器和随机最优控制器设计问题。
方华京等人综述了网络化控制系统的基于模型的故障诊断和容错控制问题。
Zhang Wei等对此情形的系统稳定性进行了分析及控制器的设计。
Salt J等人研究了多率控制实现问题,讨论了多率情况下的可变时延问题。
Rivera M G等研究了具有数据包丢失和网络诱导时延的NCS的稳定性分析问题。
谢立华等研究了带有多个数据丢包的线性NCS的最优滤波问题,给出了最优状态滤波器和预测器的设计过程。
4.1.1 多率采样理论针对时间驱动的NCS,绝大多数的文献对NCS进行分析时,都假定传感器、控制器和执行器的采样速率是一致的,即研究的是单率采样系统下的情形。
然而,对于NCS,由于节点的分散化,单一的采样速率不符合实际情况。
多率采样是符合实际系统真实情形的,Salt等人针对多率采样的控制问题进行了研究,传感器和控制器启动时又很小的时间偏差,新的传感器值到达控制器的概率假定是已知的。
若,则说明是在新的测量数据未知的情况下对控制信号进行计算。
但是对多率采样系统来说,采用时间驱动的采样方式常常会出现很多问题,如过多的冗余信号将使系统的时延、空采样、报文丢失扥变得更加严重,从而导致系统性能恶化。
4.1.2 事件驱动的采样理论Astrom K J等人研究了一阶随机系统的周期采样系统和基于事件采样系统之间的性能对比。
Hennningsson等人将其推广到多环路系统的基于事件驱动的分散控制上,研究了基于事件的调度和随机估计器、控制器设计问题;并研究了具有对数凸特性噪声的最优观测器设计问题。
他们还研究了具有混合随机和有界集扰动的线形系统的递归状态估计器设计问题。
Sandee J H等人研究了基于事件的网络化控制系统的软件设计和控制性能的综合问题。
4.1.3 Markov跳变系统可以将时延和建模成Markov链。
所有的节点都是时间驱动的。
借助Markov跳变系统理论推导出零阶均方指数稳定性的充分必要条件。
Chan H等人也应用了Markov跳变系统对系统建模,得出了无交叉的最优控制策略。
Nilsson等人对独立随机时延和具有Markov特性的时延条件下的LQG最优控制问题作了研究,给出了不同时延特性下的LQG最优控制器和闭环系统均方稳定性的条件,文中假定+<T。
该文应用MARKOV链对存在超时的系统进行了建模,并举例说明某些条件下超时能使系统性能提高。
朱其新,胡寿松将其推广到时延大于采样周期的情形,并研究了MARKOV网络化控制系统的随机状态估计器和随机最优控制器设计问题。
< P>4.1.4 切换系统俞立等人提出一种新的切换系统模型来描述既带有网络时延有具有丢包的网络化控制系统,并推导出闭环系统的指数稳定性充分条件。
然后建立了网络稳定性和丢包率之间的定量关系,并使用增广技术实现了状态镇定控制器。
4.1.5 故障诊断方华京等人综述了网络化控制系统的基于模型的故障诊断和容错控制问题,包括基于信息调度的故障诊断,简化时延系统及准T-S模糊模型的故障诊断方法,以及带有长时延的线性及非线性网络化控制系统的故障诊断问题。
并对时延系统的基于状态估计器和观测器理论的故障诊断方法、基于低通后向滤波的故障诊断方法以及基于结构矩阵的故障诊断方法作了详细的阐述。
4.2 信息调度研究现状在NCS中网络传输的信息可以分为两类:实时性信息和非实时性信息。
实时性信息对时间要求非常苛刻,如果在规定时间的上限内信息未能起作用,则该信息将被丢弃,而使用最新的信息。
NCS信息调度策略中主要调度两类数据信息:周期信息和非周期信息。
周期信息是一种实时性信息,也被称为时间出发信息或者同步信息。
非周期信息主要是指节点间的请求服务等信息,其发生时刻是随机的,也被称为事件触发信息、异步信息或者随机性信息。
在NCS中,信息调度发生在应用层,信息调度规定节点的优先发送次序、发送时刻和时间间隔,以避免网络冲突。
如果网络化控制系统的所有数据传输都能在任务时限内完成,则称传输是可调度的。
网络化控制系统中信息调度的研究可分为调度与控制分开设计和调度和控制协同设计两类。
4.2.1 调度与控制分开设计在目前的NCS研究中,一类研究是针对通讯网络,研究提高网络服务质量的信息调度方法;另一类是在给定的网络信息调度方法基础上,研究提高NCS性能的控制方法。