嵌入式系统嵌入式Linux设备驱动程序
- 格式:ppt
- 大小:236.50 KB
- 文档页数:26

第28卷第4期增刊 2007年4月仪 器 仪 表 学 报Chinese Jour nal of Scientif ic InstrumentVol.28No.4Apr.2007 嵌入式L inux 下GPIO 驱动程序的开发及应用3何 泉,贺玉梅(北京化工大学信息科学与技术学院 北京 100029)摘 要:嵌入式Linux 是一种适用于嵌入式系统的源码开放的占先式实时多任务操作系统,是目前操作系统领域中的一个热点,其重点与难点是驱动程序的开发。
开发嵌人式Linux 下的设备驱动程序,可以更好地利用新硬件特性,提高系统访问硬件的效率,改善整个应用系统的性能。
驱动程序修改非常方便,使应用系统非常灵活。
本文简要论述了基于A TM E L 公司嵌入式ARM 处理器芯片的嵌入式Linux 的GP IO 驱动程序的开发原理及流程。
关键词:嵌入式Linux ;ARM ;驱动程序;设备文件;GPIOInvest igat ion an d a pplicat ion of GP IO dr iver in t he embedded L inuxHe Quan ,He YuMei(School of I nf orma tion Science and Tec hnology BU CT ,Beij ing 100029,China )Abstract :Embedded Linu x ,w hich i s a full y real 2time kernel and applicable to embedded syst ems ,has bec o me a hot s 2po t in t he do main of op erati ng system at present.It s out line and difficult y is to investigat e drivers.Developi ng device dri vers o n embedded Lin ux can help using t he new devices ,and imp rovi ng t he e fficiency of access to t he new devices and t he p erformance cap abilit y.As drivers can be changed easil y ,t he system is very convenient and flexi ble.Thi s p a 2p er simpl y point s o ut t he element s and flow of t he GPIO driver in t he embedded Linux based o n t he A RM proces sor of A TMEL system.Key words :embedded Li nux ;A RM ;driver ;device file ;GPIO 3基金项目国家自然科学基金(6)、北京化工大学青年教师自然科学研究基金(QN 58)资助项目1 引 言随着半导体技术的飞速发展,嵌入式产品已经广泛应用于军事、消费电子、网络通信、工业控制等各个领域,这是嵌入式系统发展的必然趋势。

基于S3c2410和嵌入式Linux的ADC驱动程序实现与应用ADC(Analog-to-Digital Converter)是一种将信号从模拟信号转换为数字信号的设备,广泛应用于控制系统、数据采集系统、仪器测量等领域。
本文将介绍基于S3c2410和嵌入式Linux的ADC驱动程序实现与应用。
1. 系统架构基于S3c2410和嵌入式Linux的ADC系统,主要包含以下组件:(1)S3c2410芯片:作为系统的CPU,能够实现外设控制、中断处理、定时器等功能。
(2)ADS7843/ADS7846:作为ADC芯片,能够实现模拟信号的转换。
(3)嵌入式Linux系统:作为操作系统,提供驱动程序和应用程序运行环境。
2. 驱动程序实现ADC驱动程序是将ADS7843/ADS7846芯片与S3c2410通信的重要组件。
其主要实现了以下功能:(1)初始化ADC芯片(2)设置采样频率和分辨率(3)读取ADC转换的结果ADC驱动程序可分为三个部分:低层驱动程序、中层驱动程序和应用程序。
(1)低层驱动程序:实现ADC芯片与S3c2410之间的通信,包括SPI接口和GPIO接口。
(2)中层驱动程序:提供一些通用接口,如读写寄存器、配置寄存器等功能。
(3)应用程序:调用中层驱动程序提供的接口,实现ADC数据采集等功能。
3. 应用程序实现基于ADC驱动程序,我们可以实现各种应用程序来获取模拟信号的数值。
以下是一个简单的应用程序示例:int main(void){int fd;unsigned short value1, value2;fd = open("/dev/adc", O_RDWR);ioctl(fd, ADC_SET_FREQ, 10000); // 设置采样频率为10KHzioctl(fd, ADC_SET_RES, 12); // 设置ADC分辨率为12位while(1){read(fd, &value1, sizeof(value1)); // 读取第1个通道的数值read(fd, &value2, sizeof(value2)); // 读取第2个通道的数值printf("value1: %d, value2: %d\n", value1, value2);}close(fd);return 0;}该应用程序利用了ADC驱动程序提供的接口,设置了采样频率为10KHz,分辨率为12位,并不断读取两个通道的数值,输出到终端。
CAN总线在嵌⼊式Linux下驱动程序的实现 1引⾔ 基于嵌⼊式系统设计的⼯业控制装置,在⼯业控制现场受到各种⼲扰,如电磁、粉尘、天⽓等对系统的正常运⾏造成很⼤的影响。
在⼯业控制现场各个设备之间要经常交换、传输数据,需要⼀种抗⼲扰性强、稳定、传输速率快的现场进⾏通信。
⽂章采⽤,基于嵌⼊式系统32位的,通过其SPI, CAN扩展CAN;将嵌⼊式操作系统嵌⼊到S3C44B0X微中,能实现多任务、友好图形⽤户界⾯;针对S3C44B0X微处理器没有管理单元MMU,采⽤uClinux嵌⼊式操作系统。
这样在嵌⼊式系统中扩展CAN设备关键技术就是CAN设备在嵌⼊式操作系统下驱动程序的实现。
⽂章重点解决了CAN总线在嵌⼊式操作系统下驱动程序实现的问题。
对于⽤户来说,CAN设备在嵌⼊式操作系统驱动的实现为⽤户屏蔽了硬件的细节,⽤户不⽤关⼼硬件就可以编出⾃⼰的⽤户程序。
实验结果表明驱动程序的正确性,能提⾼整个系统的抗⼲扰能⼒,稳定性好,最⼤传输速率达到1Mb/s;硬件的错误检定特性也增强了CAN的抗电磁⼲扰能⼒。
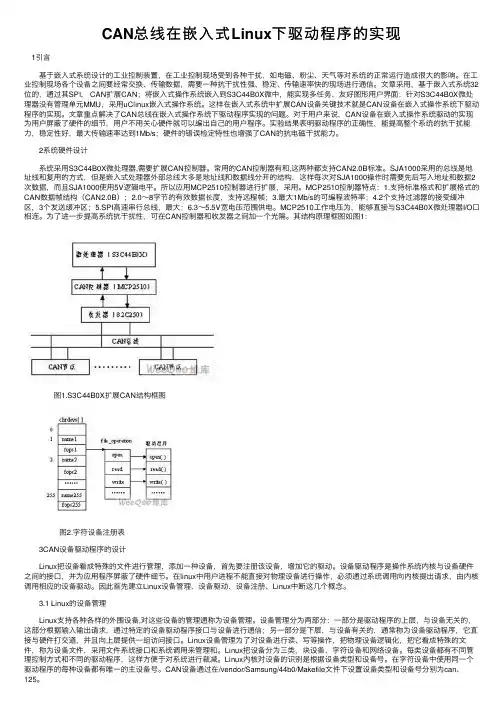
2系统硬件设计 系统采⽤S3C44B0X微处理器,需要扩展CAN控制器。
常⽤的CAN控制器有和,这两种都⽀持CAN2.0B标准。
SJA1000采⽤的总线是地址线和复⽤的⽅式,但是嵌⼊式处理器外部总线⼤多是地址线和数据线分开的结构,这样每次对SJA1000操作时需要先后写⼊地址和数据2次数据,⽽且SJA1000使⽤5V逻辑电平。
所以应⽤MCP2510控制器进⾏扩展,采⽤。
MCP2510控制器特点:1.⽀持标准格式和扩展格式的CAN数据帧结构(CAN2.0B);2.0~8字节的有效数据长度,⽀持远程帧;3.最⼤1Mb/s的可编程波特率;4.2个⽀持过滤器的接受缓冲区,3个发送缓冲区;5.SPI⾼速串⾏总线,最⼤;6.3~5.5V宽电压范围供电。
MCP2510⼯作电压为,能够直接与S3C44B0X微处理器I/O⼝相连。
C语言嵌入式Linux开发驱动和系统调用在嵌入式系统领域中,C语言是最常用的编程语言之一。
它具有高效性、可移植性和灵活性,使得它成为开发嵌入式Linux驱动和系统调用的理想选择。
本文将详细介绍C语言在嵌入式Linux开发中的应用,包括驱动开发和系统调用的实现。
一、驱动开发1.1 驱动的定义和作用驱动是连接硬件和操作系统的关键组件,它允许操作系统与具体的硬件设备进行通信。
驱动的主要作用是提供对硬件设备的控制、管理和数据传输。
在嵌入式Linux系统中,驱动的开发需要使用C语言来编写。
1.2 驱动的开发流程驱动的开发可以分为以下几个步骤:1)了解硬件设备:首先要对驱动所涉及的硬件设备有一定的了解,包括设备的主要功能和寄存器的操作方式等。
2)驱动代码编写:使用C语言编写驱动代码,根据硬件设备的数据发送和接收过程设计函数和数据结构。
3)编译和链接:将驱动代码编译成可执行文件,并将其链接到操作系统的内核中。
4)加载和卸载:通过调用命令加载和卸载驱动,使其生效或失效。
5)测试和调试:进行驱动功能的测试和调试工作,确保驱动的正确性和稳定性。
1.3 驱动示例:LED驱动以一个简单的LED驱动为例,说明驱动的开发过程:1)定义LED设备的数据结构:创建一个结构体来表示LED设备的相关信息,例如设备的名称、设备的状态等。
2)实现LED控制函数:编写LED控制函数,通过操作硬件寄存器来控制LED的开关。
3)注册驱动:将驱动注册到操作系统的驱动框架中,使其与操作系统进行通信。
4)加载和卸载驱动:通过命令加载和卸载驱动,对LED进行控制。
二、系统调用2.1 系统调用的定义和作用系统调用是用户程序与操作系统之间的接口,它允许用户程序访问操作系统提供的服务和资源。
系统调用的主要作用是提供对底层硬件和操作系统功能的访问。
2.2 系统调用的分类系统调用可以分为以下几类:1)进程控制:如创建、终止和等待进程等。
2)文件操作:如打开、读取和关闭文件等。
嵌入式Linux设备驱动程序开发分析摘要:为了探讨嵌入式linux设备驱动程序开发,文中对其设备驱动程序完成了以下分析:linux设备驱动程序开发过程;基本组成结构;设备驱动程序的框架。
关键词:嵌入式;linux设备;驱动程序;开发过程中图分类号:tp311.521 设备驱动程序1.1 linux设备驱动程序开发过程linux操作系统的主要设备是块设备、字符设备和网络设备这三类类型的文。
字符设备能够保证在文件存取时减少缓存垃圾,这样一来就能使字符设备能够驱动程序能够像访问文件一样的字符设备以此来负责实现这些行为,并实现操作。
块设备可以看作是类似磁盘这样的文件系统的宿主。
同时能被linux允许一次传输的字节数目不限,在读取设备时也能像读取字符设备那样并且能使两者的读取数方式是一致。
而网络设备异于其他两者,因为其设备面向的上一层是一个网络协议层,要想实现数据访问就必须得需要通过bsd套接口。
但实际上,无论所有嵌入式linux设备的驱动程序有多少不同,都会有一些共性,所以在开发过程中,能够实现任何类型的驱动程序通用化,这些特性举例如下:(1)读/写。
输入和输出是几乎所有设备都支持的两种基本操作,并由各个驱动程序自身来完成。
接口是由系统规定好并实行读/写操作的,这样一来就能直接由驱动程序来实践并完成具体的操作和功能。
一旦当驱动程序逐渐初始化的过程中,那么则需要注册读/写函数到操作系统的接口中。
(2)中断。
作为计算机中的一个非常重要的功能,中断处理程序也应当同读写一样注册到系统中,因为使操作系统在程序无响应时能够提供使驱动程序中断的能力。
这样一来操作系统会在硬件中断发生后自动调用驱动程序并处理程序。
(3)时钟。
许多开发设备驱动程序时上也会运用到时钟,由于驱动程序必须由操作系统提供定时机制,所以在注册时钟函数时通常是在预定的时问过了之后。
完成一个linux嵌入式设备驱动程序的流程如下:给主、次设备号下定义,或实现动态获取;完成初始化或清除驱动函数→设计好预定要实现的文件的各种操作→审核定义file—operations结构→调试所需的文件操作→向内核保证实现中断服务并注册→用命令将驱动编译到内核并完成加载→优化生成设备节点的文件。
嵌入式Linux下USB摄像头驱动程序开发摘要:介绍了嵌入式Linux系统中USB设备驱动程序开发的基本原理,通过分析USB驱动程序开发的程序框架和重要数据结构,实现了USB摄像头的嵌入式Linux驱动程序,并在S3C2440的平台上实现了图像采集。
关键词:嵌入式Linux;驱动程序;USB摄像头0引言在我们今天的生活中,摄像头广泛应用于视频聊天以及视频实时监控中。
世面上摄像头种类繁多,其中USB接口的摄像头价格便宜,性能也很高,因而更适宜推广使用。
主控和传感芯片是摄像头的重要部件。
主控芯片负责图像采集、压缩以及与主机进行信息传递。
通过摄像头进行图像采集,同时摄像头与嵌入式模块连接,通过嵌入式模块上的无线网卡把采集的图像发送出去。
嵌入式模块上使用的是Linux系统,嵌入式Linux系统的源代码方便开发,内核运行稳定并具有可裁减性,对大多数硬件都可以支持,是嵌入式系统领域最重要的操作系统。
本文重点分析了USB摄像头驱动模块的整体结构及驱动程序的实现。
1Linux设备驱动的基本概念设备驱动程序是一种可以使计算机和设备进行通信的特殊程序,可以说相当于硬件的接口,操作系统只有通过这个接口,才能控制硬件设备的工作,假如某设备的驱动程序未能正确安装,便不能正常工作。
应用程序把硬件设备看作是一个设备文件,这样它对硬件设备进行操作就可以像操作普通文件一样。
设备驱动程序被看作是内核的构成部分,其完成的功能有:设备的初始化和释放、数据从内核到硬件、从硬件读取数据、接收应用程序传送给设备文件的数据,返回其请求的数据。
Linux内核对外围设备控制操作是通过驱动程序来完成,所以每个设备都需要有驱动程序,否则设备将无法正常工作。
4结语对中国象棋的文化底蕴进行研究,设计并制作象棋多媒体学习软件,内容涉及象棋文化、口诀、技巧、各棋子基本走法、经典棋局、大师风采等方面,能够丰富人们的精神生活,普及传统文化,发扬中华文明。
象棋多媒体学习软件界面美观,多种媒体效果丰富,交互性强,内容易扩充。
嵌入式Linux系统下I2C设备驱动程序的开发【摘要】 I2C总线是一种很通用的总线,具有简单、高效等特点,广泛应用在各种消费类电子产品及音视频设备上,在嵌入式系统的开发中也经常用到。
本文分析了嵌入式 linux系统中I2C驱动程序的结构,并结合一个具体的I2C 时钟芯片DS1307,说明在嵌入式linux系统下开发I2C设备驱动程序的一般流程。
【关键字】I2C总线嵌入式linux 驱动开发1、I2C总线简介I2C (Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
I2C总线最主要的优点就是简单性和有效性。
1.1 I2C总线工作原理I2C总线是由数据线SDA和时钟SCL构成的串行总线,各种被控制器件均并联在这条总线上,每个器件都有一个唯一的地址识别,可以作为总线上的一个发送器件或接收器件(具体由器件的功能决定) [1]。
I2C总线的接口电路结构如图1所示。
图1 I2C总线接口电路[1]1.2 I2C总线的几种信号状态[1]1. 空闲状态:SDA和SCL都为高电平。
2. 开始条件(S):SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
3. 结束条件(P):SCL为低电平时,SDA由低电平向高电平跳变,结束传送数据。
4. 数据有效:在SCL的高电平期间, SDA保持稳定,数据有效。
SDA的改变只能发生在SCL的底电平期间。
5. ACK信号: 数据传输的过程中,接收器件每接收一个字节数据要产生一个ACK信号,向发送器件发出特定的低电平脉冲,表示已经收到数据。
1.3 I2C总线基本操作I2C总线必须由主器件(通常为微控制器)控制,主器件产生串行时钟(SCL),同时控制总线的传输方向,并产生开始和停止条件。
数据传输中,首先主器件产生开始条件,随后是器件的控制字节(前七位是从器件的地址,最后一位为读写位)。
接下来是读写操作的数据,以及 ACK响应信号。