一种三自由度并联机器人运动轨迹精度的可靠性研究
- 格式:pdf
- 大小:369.90 KB
- 文档页数:6
三自由度动力学模型1. 动力学模型概述动力学是研究物体运动的原因和规律的学科,而三自由度动力学模型则是一种描述物体在三个自由度上运动的数学模型。
在机器人控制、航天器姿态控制等领域中,三自由度动力学模型被广泛应用。
三自由度动力学模型通常用于描述物体在空间中的姿态变化和运动轨迹。
其中,自由度指的是物体可以沿着某个轴线或平面进行移动的数量。
对于一个具有三个自由度的系统,需要考虑它们之间的相互作用、受力情况以及运动规律等因素。
2. 动力学方程推导为了建立三自由度动力学模型,我们需要推导出系统的运动方程。
这一过程可以通过拉格朗日方法来完成。
首先,我们需要定义系统的广义坐标和广义速度。
广义坐标用来描述系统中每个独立变量所对应的位置或角度,而广义速度则表示这些变量随时间变化的速率。
接下来,我们利用拉格朗日函数来描述系统的能量,并通过最小作用量原理得到系统的拉格朗日方程。
拉格朗日方程可以写作:d dt (∂L∂q i)−∂L∂q i=Q i其中,L是系统的拉格朗日函数,q i是广义坐标,q i是广义速度,Q i是外部施加在系统上的力。
将拉格朗日方程应用到三自由度动力学模型中,我们可以得到三个关于时间变化的方程。
这些方程描述了系统在每个自由度上的运动规律。
3. 动力学模型求解一旦我们建立了三自由度动力学模型并得到了运动方程,就可以通过求解这些方程来获得系统的运动行为。
通常情况下,我们会将运动方程转化为矩阵形式,并使用数值计算方法进行求解。
其中,矩阵形式的运动方程可以写作:M(q)q̈+C(q,q̇)q̇+G(q)=τ其中,M(q)是质量矩阵,描述了物体在每个自由度上的质量分布情况;C(q,q̇)是科里奥利矩阵,表示惯性力和科里奥利力的影响;G(q)是重力矩阵,描述了物体受到的重力作用;τ是外部施加的控制力。
通过求解上述方程,我们可以得到系统在每个自由度上的加速度q̈,从而推导出物体的姿态变化和运动轨迹。
4. 动力学模型应用三自由度动力学模型在机器人控制、航天器姿态控制等领域中有着广泛的应用。
三自由度机器人设计毕业设计一、引言近年来,机器人技术的发展为各行各业带来了巨大的变革和进步。
而在机器人设计的领域中,三自由度机器人一直以其简单、灵活和易于控制等特点备受关注。
本设计将围绕三自由度机器人的设计,研究其结构、控制系统以及应用。
二、三自由度机器人的相关概念三自由度机器人是指具有三个独立运动自由度的机器人。
在其结构设计中,一般包括三个旋转关节或者直线关节,使得机器人能够在三个不同的方向上运动。
这种结构使得三自由度机器人具有较强的灵活性和适应性,适用于各种各样的工业应用场景。
三、三自由度机器人的设计原理1. 结构设计:三自由度机器人的结构设计涉及到关节的选型、传动系统的设计以及工作空间的规划等方面。
应考虑机器人的稳定性、精度和载荷能力,以及工作环境的特点,如狭窄空间、高温或高湿度等因素。
2. 控制系统设计:三自由度机器人的控制系统设计应考虑到运动轨迹规划、动力学建模、传感器系统和实时控制等方面。
尤其是对于工业应用来说,控制系统的稳定性和精度是至关重要的。
3. 应用设计:三自由度机器人的设计还需要考虑具体的应用场景,例如装配、搬运、焊接、切割等。
在设计过程中,需要充分了解工艺流程和需求,以确保机器人的设计符合实际应用的需要。
四、毕业设计的主要内容1. 三自由度机器人结构设计:在毕业设计中,将对三自由度机器人的结构进行设计和优化,包括关节选型、传动系统设计以及工作空间规划等。
2. 控制系统设计:设计三自由度机器人的控制系统,包括运动规划、动力学建模、传感器系统设计以及实时控制算法的研究。
3. 应用案例研究:以实际应用场景为背景,设计并实现三自由度机器人的具体应用,如装配、搬运或焊接等。
4. 实验验证与性能评估:通过实验验证,对设计的三自由度机器人进行性能评估,包括精度、稳定性、响应速度等方面的指标。
五、预期成果1. 完整的三自由度机器人设计方案,包括结构设计、控制系统设计和应用案例研究。
2. 实验验证数据和性能评估报告,验证毕业设计的可行性和有效性。
3-RRRT并联机器人精度设计与运动学参数辨识的开题报告题目:3-RRRT并联机器人精度设计与运动学参数辨识的开题报告一、研究背景与意义机器人技术已成为当今世界最为热门和前沿的领域之一,尤其是在制造业和生产过程中扮演着越来越重要的角色。
而机器人的运动控制与精度设计是机器人工程中的重要问题,尤其是在高精度加工和装配中需要更高的运动精度和定位精度。
因此,对机器人的运动学参数辨识和精度设计进行深入研究,对提高机器人的运动精度和控制能力具有重要意义。
本研究基于3-RRRT并联机器人,旨在通过运动学参数辨识和精度设计的方法,提高机器人的运动精度和控制能力,实现机器人在高精度加工和装配领域的应用,对于相关领域的研究和发展具有重要意义。
二、研究内容和方法1. 研究内容(1)3-RRRT并联机器人的机构分析和建模;(2)机器人运动学参数的辨识和分析;(3)机器人精度设计并进行仿真验证。
2. 研究方法(1)基于3-RRRT并联机器人的机构特点,建立机器人的机构模型;(2)利用基于Kalman滤波的最小二乘法实现机器人的运动学参数辨识;(3)基于数学模型和仿真模拟验证机器人的精度设计。
三、预期研究成果和创新点本研究将设计完成一个具有较高精度的3-RRRT并联机器人,并通过运动学参数辨识和精度设计的方法,实现机器人运动精度的大幅提升,进而实现机器人在高精度加工和装配中的应用。
本研究的创新点在于:(1)利用基于Kalman滤波的最小二乘法实现机器人的运动学参数辨识,提高了机器人运动控制精度;(2)通过精度设计验证机器人在高精度加工和装配中的应用,具有一定的实际意义和应用价值。
四、研究计划本研究的计划如下:第一年:(1)进行机器人机构分析和建模;(2)分析机器人运动学参数的特点;(3)基于Kalman滤波的最小二乘法实现机器人的运动学参数辨识。
第二年:(1)设计机器人精度控制方法;(2)利用数学模型和仿真验证机器人的精度设计。
3-rps并联机构特点
1、机构结构简单明了
3-RPS并联机构结构简单明了,仅由三个旋转副组成,其中两个旋转副为主动副,一个旋转副为被动副。
因此,其组装过程简单,也易于控制和维护。
2、高自由度
3-RPS并联机构具有6个自由度,能够实现三维空间中的自由运动。
在机器人的运动过程中,可以自由度的选择,实现不同的运动路径,满足各种不同工业任务和操作需求。
3、精度高
由于3-RPS机构采用旋转副连接,机构不易出现过分松散或磨损现象,能够保证机构的精度和稳定性。
4、负载能力强
3-RPS并联机构不仅可以承载较大的负载,在某些特定情况下能够承载高于机身自身重量的负载,同时还具有较高的精度,能够在负载较大的情况下稳定地运动。
5、运动范围广
3-RPS并联机构的主动副是两个旋转副,被动副是一个旋转副,因此,机构能够实现较大的运动范围和较高的转动速度。
6、用途广泛
3-RPS并联机构广泛应用于机器人、飞行器、医疗器械、精密仪器等领域。
在机器人领域,3-RPS并联机构可以实现各种不同操作,如旋转、倾斜、平移等动作,使机器人能够在复杂的工厂环境下进行各种操作。
同时,这种机型可以大幅降低生产成本,促进行业发展。
引言概述:并联机器人是一种特殊类型的机器人,其特点是由多个机械臂通过共享同一个基座连接在一起。
这种机器人结构在工业生产和其他应用领域中广泛使用,具有多方面的优势。
本文将详细介绍并联机器人的特点,并对其应用范围进行分析。
正文内容:一、高精度和刚性1.1 高精度控制:并联机器人由多个机械臂组成,通过共享同一个基座,可以实现对机器人运动的高度控制。
这种结构可以提供更高的精度,使机器人在执行任务时能够保持更强的稳定性和准确性。
1.2 刚性结构:由于并联机器人的各个机械臂共享同一个基座,形成了一个紧密的结构。
这种结构提供了较高的刚性,使机器人在进行各种操作时能够保持更稳定的姿态,减少振动和变形。
二、扩展性和柔性2.1 多自由度:由于并联机器人由多个机械臂组成,每个机械臂都可以单独控制,因此具有较高的自由度。
这意味着并联机器人可以执行更复杂的任务,并适应不同的工作环境和需求。
2.2 应用广泛:由于其结构的柔性和可调节性,使得并联机器人在各个领域有着广泛的应用。
例如,在装配行业中可以用于精确装配操作,在医疗领域中可以用于手术辅助等。
三、较高的负载能力3.1 共享负载:并联机器人的机械臂通过共享同一个基座连接在一起,可以共同承担负载。
这使得并联机器人能够处理较重的物体和执行较大的力矩任务,适用于一些需要高负载能力的工作场景。
3.2 分配负载:并联机器人还可以根据任务要求进行负载分配,通过合理分配负载可以最大限度地提高机器人的效率和稳定性。
四、高速度和高加速度4.1 快速响应能力:并联机器人由多个机械臂组成,每个机械臂都可以独立运动和控制。
这使得并联机器人具有快速响应能力,能够以较高的速度完成各种任务。
4.2 高加速度:并联机器人的结构允许机械臂进行快速加速和减速。
这对于某些需要快速动作和高加速度的任务非常重要,如快速拾取和放置等。
五、安全性和人机协作5.1 安全性保障:并联机器人在执行任务时具有较高的安全性。
由于其结构可以提供更高的稳定性和准确性,减少了机器人发生意外事故的概率。
6-RSS并联机器人动力学与控制研究6-RSS并联机器人动力学与控制研究引言并联机器人是指由多个平行连接构成的机械结构,在工业生产和科学研究中具有广泛的应用。
6-RSS并联机器人是一种典型的并联机器人结构,它由六个平行结构的自由度所组成。
本文将介绍6-RSS并联机器人的动力学与控制研究的最新进展。
一、6-RSS并联机器人的动力学建模动力学建模是研究机器人运动和力学性能的基础,对于实现机器人的精确控制至关重要。
6-RSS并联机器人的动力学建模可以采用拉格朗日方法或牛顿-欧拉方法。
这两种方法都是常用的机器人动力学建模方法,可以描述机器人结构的运动学和动力学特性。
二、6-RSS并联机器人的逆动力学控制逆动力学控制是指根据所期望的机器人末端运动来计算所需要的关节力和力矩,从而实现末端运动的精确控制。
逆动力学控制是关节空间控制的一种重要方法。
对于6-RSS并联机器人,可以通过将逆动力学控制问题转化为代数方程组的求解来实现。
三、6-RSS并联机器人的前向动力学控制前向动力学控制是指根据所给定的关节力和力矩来计算机器人末端的运动,并用于机器人的轨迹规划和控制。
前向动力学控制是一种模型预测控制方法,可以通过数值求解差分方程来实现6-RSS并联机器人的运动控制。
四、6-RSS并联机器人的优化控制优化控制是指根据所给定的性能指标和约束条件来优化机器人的运动控制策略。
在6-RSS并联机器人的运动控制中,可以通过优化控制方法来实现机器人的性能优化和约束条件的满足。
五、6-RSS并联机器人的仿真实验仿真实验是验证动力学与控制策略有效性的一种重要手段。
通过将6-RSS并联机器人的动力学模型与控制算法实现仿真,并与实际机器人运动进行对比,可以评估和改进控制策略的性能。
六、6-RSS并联机器人的应用前景6-RSS并联机器人在工业生产和科学研究中有广泛的应用前景。
它可以用于精确定位和操作、高速加工和装配等任务,对提高生产效率和产品质量具有重要意义。
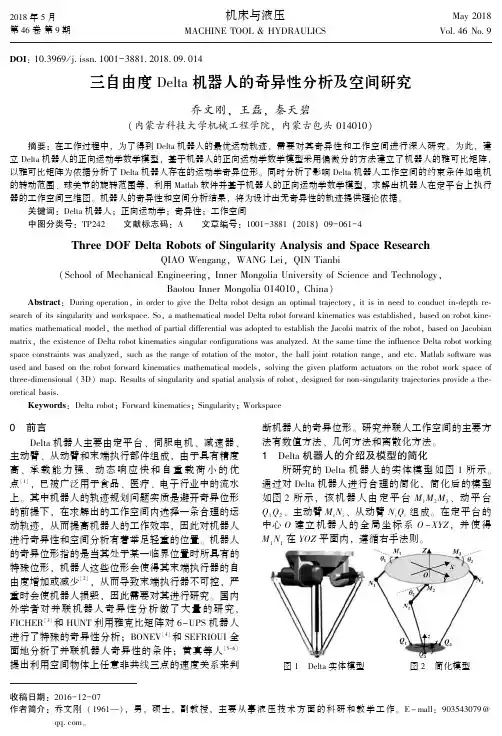
2018年5月第46卷第9期机床与液压MACHINETOOL&HYDRAULICSMay2018Vol 46No 9DOI:10.3969/j issn 1001-3881 2018 09 014收稿日期:2016-12-07作者简介:乔文刚(1961 ),男,硕士,副教授,主要从事液压技术方面的科研和教学工作㊂E-mall:903543079@qq com㊂三自由度Delta机器人的奇异性分析及空间研究乔文刚,王磊,秦天碧(内蒙古科技大学机械工程学院,内蒙古包头014010)摘要:在工作过程中,为了得到Delta机器人的最优运动轨迹,需要对其奇异性和工作空间进行深入研究㊂为此,建立Delta机器人的正向运动学数学模型,基于机器人的正向运动学数学模型采用偏微分的方法建立了机器人的雅可比矩阵,以雅可比矩阵为依据分析了Delta机器人存在的运动学奇异位形㊂同时分析了影响Delta机器人工作空间的约束条件如电机的转动范围㊁球关节的旋转范围等,利用Matlab软件并基于机器人的正向运动学数学模型,求解出机器人在定平台上执行器的工作空间三维图㊂机器人的奇异性和空间分析结果,将为设计出无奇异性的轨迹提供理论依据㊂关键词:Delta机器人;正向运动学;奇异性;工作空间中图分类号:TP242㊀㊀文献标志码:A㊀㊀文章编号:1001-3881(2018)09-061-4ThreeDOFDeltaRobotsofSingularityAnalysisandSpaceResearchQIAOWengang,WANGLei,QINTianbi(SchoolofMechanicalEngineering,InnerMongoliaUniversityofScienceandTechnology,BaotouInnerMongolia014010,China)Abstract:Duringoperation,inordertogivetheDeltarobotdesignanoptimaltrajectory,itisinneedtoconductin⁃depthre⁃searchofitssingularityandworkspace.So,amathematicalmodelDeltarobotforwardkinematicswasestablished,basedonrobotkine⁃maticsmathematicalmodel,themethodofpartialdifferentialwasadoptedtoestablishtheJacobimatrixoftherobot,basedonJacobianmatrix,theexistenceofDeltarobotkinematicssingularconfigurationswasanalyzed.AtthesametimetheinfluenceDeltarobotworkingspaceconstraintswasanalyzed,suchastherangeofrotationofthemotor,theballjointrotationrange,andetc.Matlabsoftwarewasusedandbasedontherobotforwardkinematicsmathematicalmodels,solvingthegivenplatformactuatorsontherobotworkspaceofthree⁃dimensional(3D)map.Resultsofsingularityandspatialanalysisofrobot,designedfornon⁃singularitytrajectoriesprovideathe⁃oreticalbasis.Keywords:Deltarobot;Forwardkinematics;Singularity;Workspace0㊀前言Delta机器人主要由定平台㊁伺服电机㊁减速器㊁主动臂㊁从动臂和末端执行部件组成,由于具有精度高㊁承载能力强㊁动态响应快和自重载荷小的优点[1],已被广泛用于食品㊁医疗㊁电子行业中的流水上㊂其中机器人的轨迹规划问题实质是避开奇异位形的前提下,在求解出的工作空间内选择一条合理的运动轨迹,从而提高机器人的工作效率,因此对机器人进行奇异性和空间分析有着举足轻重的位置㊂机器人的奇异位形指的是当其处于某一临界位置时所具有的特殊位形,机器人这些位形会使得其末端执行器的自由度增加或减少[2],从而导致末端执行器不可控,严重时会使机器人损毁,因此需要对其进行研究㊂国内外学者对并联机器人奇异性分析做了大量的研究,FICHER[3]和HUNT利用雅克比矩阵对6-UPS机器人进行了特殊的奇异性分析;BONEV[4]和SEFRIOUI全面地分析了并联机器人奇异性的条件;黄真等人[5-6]提出利用空间物体上任意非共线三点的速度关系来判断机器人的奇异位形㊂研究并联人工作空间的主要方法有数值方法㊁几何方法和离散化方法㊂1㊀Delta机器人的介绍及模型的简化所研究的Delta机器人的实体模型如图1所示㊂通过对Delta机器人进行合理的简化,简化后的模型如图2所示,该机器人由定平台M1M2M3㊁动平台Q1Q2㊁主动臂MiNi㊁从动臂NiQi组成㊂在定平台的中心O建立机器人的全局坐标系O-XYZ,并使得M1N1在YOZ平面内,遵循右手法则㊂图1㊀Delta实体模型㊀㊀㊀㊀㊀图2㊀简化模型1 1㊀机器人正向运动学数学建模设定平台和动平台半径分别为R2和r1,主动臂和从动臂的长度分别为L1和L2,正向运动学建模是已知3个电机的转角求解末端执行器的坐标㊂首先,需要将从动杆NiQi分别沿着向量Qioң平移,使得Q1㊁Q2㊁Q3交于动平台的中心o,点N1㊁N2㊁N3分别移动到Nᶄ1㊁Nᶄ2㊁Nᶄ3,平移后下半部分的简化模型如图3所示㊂图3㊀平移简化模型设o在全局坐标下的坐标为(xyz),并根据前面的已知条件可以求得Ni在全局坐标下的坐标,再结合|NiQi|=L2可得[(R2+L1cosθi-r1)cosωi-x]2+[(R2+L1cosθi-r1)sinωi-y]2+[L1sinθi+z]2=L22(1)式中:ωi=θi=32π16π23πéëêêùûúú对公式(1)进行简化整理可得:x2+(b12+y)2+(b13+z)2=L22(b21-x)2+(b22-y)2+(b23+z)2=L22(2)(b31+x)2+(b32-y)2+(b33+z)2=L22解方程组(2)得:x=U1-U2zy=U3-U4z(3)P1z2-2P2z+P3=0式中:U1=(b32-b12)T1-(b22-b12)T22b21(b32-b12)-2b31(b22-b12)U3=(b31-b12)T1-(b22-b12)T22b31(b22-b12)-2b21(b32-b12)U2=(b32-b13)(b32-b12)-(b33-b13)(b32-b12)b21(b32-b12)-b31(b22-b12)U4=b31(b23-b13)-b21(b33-b13)b31(b22-b12)-b21(b32-b12)T1=-b21b12-b22()b13-b23()T2=-b31b12-b32()b13-b33()P1=U22+U24+1P2=U1U2+U3U4+2b12U4+2b13P3=U21+U23+b212+b213-L222 Delta机器人的奇异性分析分析机器人奇异位形的方法主要有运动学法㊁几何法和代数法,而代数法解并联机构奇异位形实质是求其雅可比矩阵是否为满秩,若不为满秩则机器人出现奇异位形[7-8]㊂因此文中将基于雅可比矩阵判别式来分析机器人的奇异位形㊂2 1㊀Delta机器人的雅可比矩阵的求解雅可比矩阵是机器人一个重要的概念,它反应了在全局坐标系下机器人的末端执行器的速度与驱动关节角速度的映射关系,即表达式为:X㊃n=Jθ㊃(4)式中:J为机器人的雅可比矩阵㊂根据Delta机器人自身的约束条件可知:NiQi2=L22(5)式中:NiQi在全局坐标下的表示为:NiQi=OiQi-(OiMi+MiNi)=xnynznéëêêêêùûúúúú-WiRR200éëêêêùûúúú+æèççL1cosθi0-L1sinθiéëêêêùûúúúöø÷÷÷(6)式中:WiR为局部坐标系到全局坐标系的旋转变换矩阵㊂令其ui=NiQi,对式(5)进行时间的微分得:uTiu㊃i+u㊃Ti㊃ui=0(7)整理式(6)㊁(7)可得雅可比矩阵:uT1uT2uT3éëêêêêùûúúúúX㊃n+uT1w1000uT2w2000uT3w3éëêêêêùûúúúúθ㊃1θ㊃2θ㊃3éëêêêêêùûúúúúú=0式中:wi=WiRL1sinθi0-L1cosθiéëêêêùûúúú即JxX㊃n=Jpθ㊃n(8)式中:Jx和Jp为机器人的雅克比矩阵㊂2 2㊀奇异位形分析由上述分析可知机器人的奇异性与Jx和Jp有关,因此以下将分情况分析机器人的奇异位形㊂(1)当Jx=0,Jpʂ0时,并联机器人出现奇异位形㊂向量组u1㊁u2㊁u3线性相关,此时Delta机器人3条从动杆至少有两条平行或3条从动杆共面,得到的3种位形如图4㊂㊃26㊃机床与液压第46卷图4㊀第一类奇异位形机器人在此类型奇异位形时表示驱动器虽然进行驱动但输出杆件不移动,从而降低机器人的刚度,如果处于这些情况机器人将无法靠自身的力量恢复正常,因此从控制方面来看是极其危险的㊂(2)当Jxʂ0,Jp=0时,并联机器人出现奇异位形㊂uTiwi至少有1个为零,此时Delta机器人至少有1条支链从动杆与主动杆共线㊂由于动平台只能平动,因此3条同为直线的可能性没有,从而得到的两种奇异位形如图5㊂图5㊀第二类奇异位形机器人在此类型奇异位形时虽驱动器进行驱动但末端执行器沿Z方向不动,如果并联机器人发出强行沿Z方向运动的指令时,驱动器将会受到无穷大的力,从而导致伺服电机的损坏㊂3 Delta机器人的工作空间分析并联机器人和串联机器人相比有响应快㊁误差累计小㊁承载能力强等优点,但是这些优点都是以牺牲其工作空间为代价的㊂机器人工作空间代表了机器人的在不发生碰撞和无奇异位形的前提下,末端操作器能够达到的所有空间位置的集合[9],是衡量机器人工作性能的一个重要指标㊂以下分析影响机器人工作空间的因素㊂3 1㊀工作空间影响因素(1)球关节转角范围㊂根据国家制造业对球关节转角规定,其最大范围应在ʃ25ʎ,故在Delta机器人中使用的球关节旋转范围是-25ʎɤωɤ25ʎ㊂(2)伺服电机转角范围㊂为了避免在运动过程中Delta机器人的主动杆与定平台等发生碰撞,因此需要限制伺服电机的转角在一定范围内㊂但限制伺服电机的转角将导致末端执行器运动范围缩小,进行合理的测量和计算,将3个伺服电机转角限制在-60ʎɤθiɤ60ʎ㊂(3)从动杆之间的干涉约束㊂由于机器人的3条从动杆在运动过程中存在碰撞的可能,但Delta机器人出现碰撞情况都发生在奇异性形位上,因此对奇异位形进行约束,从而避免杆件碰撞现象的发生㊂(4)定长连杆的长度约束㊂Delta并联机构中连杆均为定长杆,其长度Li,确定之后,其工作空间大小也就相应确定了㊂3 2㊀基于Matlab的Delta机器人的工作空间的仿真首先确定Delta机器人的基本参数,机器人定平台和动平台半径R2=150和r1=50,主动杆和从动杆的长L1=300和L2=600㊂再结合Delta机器人正向运动学数学模型和以上分析的约束条件,并在Matlab环境下编写三自由度Delta并联机器人工作空间的程序,部分程序如下:trisurf(tri,Pos(:,1),Pos(:,2),Pos(:,3),ᶄFaceColorᶄ,ᶄinterpᶄ,...ᶄEdgeColorᶄ,ᶄflatᶄ,...㊀㊀ᶄfacecolorᶄ,ᶄredᶄ,...ᶄFaceLightingᶄ,ᶄphongᶄ);%绘制不规则三角曲面图camlight(ᶄheadlightᶄ);lightinggouraud;㊀xlabel(ᶄx-axisᶄ),ylabel(ᶄy-axisᶄ),zlabel(ᶄz-axisᶄ)㊀title(ᶄDeltaparallelrobotworkspacefigureᶄ)axisvis3d;㊀%冻结屏幕高宽比在Matlab软件中,得到了Delta并联机器人末端执行器的工作空间图和在各平面的投影图,如图6所示㊂从图6可知,Delta并联机器人的工作空间类似于半个椭球体,且为实心,在工作范围内,高度越高,末端执行器可移动的半径越大㊂并运用Matlab软件中的DataCursor功能测的分别测出Delta并联机器人在X轴运动的范围为-109 2 109 3,在Y轴的运动范围为-115 9 125,在Z轴的运动范围为-1117 -1094,为轨迹规划提供理论依据㊂㊃36㊃第9期乔文刚等:三自由度Delta机器人的奇异性分析及空间研究㊀㊀㊀图6㊀Delta机器人的仿真工作空间4㊀结束语建立了Delta机器人的正向运动学数学模型和雅可比矩阵㊂并基于其雅可比矩阵判别式分情况分析了机器人的奇异位形,了解了奇异位形对机器人运动性能影响极大,因此在机器人工作时应避免奇异位形的出现㊂通过基于Delta机器人运动学正向运动学数学模型,同时分析了影响机器人的工作空间的因素如球关节转角范围㊁伺服电机转角范围等㊂最后根据机构设计尺寸和工作空间影响因素,并利用Matlab软件将上述条件编写成Matlab语句,从而解出机器人末端执行器的工作空间直观性表达㊂研究结果将为Delta机器人的轨迹规划问题在实际中的应用奠定了基础㊂参考文献:[1]康晓娟.Delta并联机器人的发展及其在食品工业上的应用[J].食品与机械,2014(5):167-172.KANGXJ.DevelopmentandApplicationofDeltaParallelRobot[J].Food&Machinery,2014(5):167-172.[2]梅莱.并联机器人[M].黄远灿,译.北京:机械工业出版社,2014.[3]FICHTERE.FAStewartPlatformBasedManipulator:Gen⁃eralTheoryandPracticalConstruction[J].InternationalJournalofRoboticsResearch,1986,5(2):157-181.[4]BONEVIA,ZLATANOVD,GOSSELINC.SingularityAnalysisof3DOF-planarMechanismsViaScrewTheory[J].ASMEJ.ofMechanicalDesign,2003,125(3):573-581.[5]HUANGZ,ZHAOYS,WANGJ,etal.KinematicPrincipleandGeometricalConditionofGeneral-Linear-ComplexSpecialConfigurationofParallelManipulators[J].Mecha⁃nismandMachineTheory,1999,34(8):1171-1186.[6]HUANGZ,DUX.General-Linear-ComplexSpecialConfig⁃urationAnalysisof3/6-SPSStewartParallelManipulator[J].ChinaMechanicalEngineering,1999,10(9):997-1000.[7]刘玮,常思勤.一种新型并联机器人的奇异性与工作空间研究[J].中国机械工程,2012(7):786-790.LIUW,CHANGSQ.StudyonSingularityandWorkspaceofNoveParallelManipulator[J].ChinaMechanicalEngi⁃neering,2012(7):786-790.[8]周结华,彭侠夫.三自由度冗余驱动并联机构的奇异性和工作空间分析[J].中国机械工程,2014(6):751-756.ZHOUJH,PENGXF.SingularityandWorkspaceAnalysisofa3-DOFParallelManipulatorwithRedundantActuation[J].ChinaMechanicalEngineering,2014(6):751-756.[9]商大伟.高速Delta并联机器人系统的集成与测试[D].青岛:中国海洋大学,2014.(责任编辑:卢文辉)㊃46㊃机床与液压第46卷。
一、 Delta 并联机器人1.Delta 并联机器人概括Delta机器人属于高速、轻载的并联机器人,一般经过示教编程或视觉系统捕获目标物体,由三个并联的伺服轴确立抓具中心(TCP)的空间地点,实现目标物体的运输,加工等操作。
Delta机器人主要应用于食品、药品和电子产品等加工、装置。
Delta机器人以其重量轻、体积小、运动速度快、定位精准、成本低、效率高等特色,正在市场上被宽泛应用。
2.Delta 并联机器人特色Delta机器人是典型的空间三自由度并联机构,整体构造精细、紧凑,驱动部分均布于固定平台,这些特点使它拥有以下特征:承载能力强、刚度大、自重担荷比小、动向性能好。
并行三自由度机械臂构造,重复定位精度高。
超高速拾取物件,一秒钟多个节拍。
3.Delta 并联机器人应用系统Delta 并联机器人应用系统主要由三个部分构成:机器人、输送线及机器人安装框架。
其布局以下列图1。
构成机器人由基板、电机罩、旋转轴、主机械臂、副机械臂、抓具中心等构成,以下列图 2 所示。
图1 Delta机器人整体布局图2 Delta机器构成图3 Delta机器人输送装置输送线机器人配套输送线采纳电机输送带方式,输送线如图 3 所示。
经过机器人视觉系统定位与输送线编码器反馈地点的方式,实现机器人对目标工件的地点、姿态辨别和正确抓取。
依据节拍与现场需要,可并行多条输送线同时操作。
机器人安装框架机器人安装框架用来固定机器人机构,其构造及安装方式依据现场应用进行定制。
4.Delta 并联机器人工作空间Delta机器人的工作空间由主机械臂及副机械臂的长度、动平台与静平台半径,以及主动臂活动角度范围这几个参数来确立。
以负载为一公斤的delta机器人工作空间为例,以下列图所示。
5.Delta 并联机器人运动轨迹Delta机器人基本的运动轨迹以下列图,由S1、S2、 S3 构成门字形的三部分轨迹构成,分别为拾取、平移、搁置三个阶段。
Delta机器人进行抓取目标工件时主要以走门字形运动轨迹,也可依据不一样的应用要求,规划不一样的运动轨迹。
动态优化的一种新型高速,高精度的三自由度机械手①彭兰(兰朋)②,鲁南立,孙立宁,丁倾永(机械电子工程学院,哈尔滨理工学院,哈尔滨 150001,中国)( Robotics Institute。
Harbin Institute of Technology,Harbin 150001,P。
R。
China)摘要介绍了一种动态优化三自由度高速、高精度相结合,直接驱动臂平面并联机构和线性驱动器,它可以提高其刚度进行了动力学分析软件ADAMS仿真模拟环境中,进行仿真模拟实验.设计调查是由参数分析工具完成处理的,分析了设计变量的近似的敏感性,包括影响参数的每道光束截面和相对位置的线性驱动器上的性能.在适当的方式下,模型可以获得一个轻量级动态优化和小变形的参数。
一个平面并联机构不同截面是用来改进机械手的.结果发生明显的改进后的系统动力学仿真分析和另一个未精制一个几乎是几乎相等.但刚度的改进的质量大大降低,说明这种方法更为有效的。
关键词: 机械手、 ADAMS、优化、动力学仿真0 简介并联结构机械手(PKM)是一个很有前途的机器操作和装配的电子装置,因为他们有一些明显的优势,例如:串行机械手的高负荷承载能力,良好的动态性能和精确定位的优点等. 一种新型复合3一DOF臂的优点和串行机械手,也是并联机构为研究对象,三自由度并联机器人是少自由度并联机器人的重要类型。
三自由度并联机器人由于结构简单,控制相对容易,价格便宜等优点,具有很好的应用前景。
但由于它们比六自由度并联机器人更复杂的运动特性,增加了这类机构型综合的难度,因此对三自由度并联机器人进行型综合具有理论意义和实际价值。
本文利用螺旋理论对三自由度并联机器人进行型综合,以总结某些规律,进一步丰富型综合理论,并为新机型的选型提供理论依据,以下对其进行阐述。
如图-1所示机械手组成的平面并联机构(PPM)包括平行四边形结构和线性驱动器安装在PPM.两直接驱动电机c整合交流电高分辨率编码器的一部分作为驱动平面并联机械装置.线型致动器驱动的声音线圈发动机.这被认为是理想的驱动短行程的一部分.作为一个非换直接驱动类,音圈电机可以提供高位置敏感和完美的力量与中风的角色,高精密线性编码作为回馈部分保证在垂直方向可重复性。
一种三自由度并联机器人运动轨迹精度的可靠性研究六
口李兵
口张晓瑾
口谢里阳口魏玉兰
东北大学机械工程与自动化学院沈阳
110004
摘要:机器人轨迹精度的可靠性是评价机构性能的重要参数。
压电材料作为一种驱动器能够抑制机器人柔性连接杆的振动,在抑制振动的同时也提高了机器人运动轨迹的精度。
首先介绍了一种三自由度平面并联机器人系统;其次表达了振动控制系统的工作原理和实验分析;然后分别表达了不考虑振动和考虑振动因素时机器人轨迹精度的可靠度计算方法;最后分析了无振动控制和有振动控制时机器人运动轨迹精度的可靠度。
可靠度计算表明,振动控制系统能够提高机器人运动轨迹精度的可靠度。
关键词:并联机器人减振轨迹精度可靠性中图分类号:TP242
0328
文献标识码:A文章编号:1000一4998(2010)lO—O005一04
Abstract:Thereliabilityofthetrajectoryaccuracyofthemnipulator
is
imponant
p啪meter
toevaluatethe
perfomance
of
tIle
m粕ipulator.ThevibmtionoftIlenexiblelinkIge8ofthem肌ipulatorc锄besuppressedwhenthepiezoelectricmaterialisu鸵d
鹊a咖sducer.
Andthe
kine啪tic
trajectoryaccuracyofthem锄ipulatorisimproved
at
the
s舢e
time.
Athree—degree—of—
f}eedom
pl衄盯paraUelrnanipulatori8
in删uced
first.Thentheworkingprincipleandexperimentalanalysisofthevibration
suppression8ystema聆pre鸵med.Thecalculatingmethodsofthereliabilityofthet阳jectoryaccuracyof山e毗njpulator
with
withoutvibmtionfactorcorIside陀d
alsoprovided.Finally,tlIe陀liabilityofkinematict陋jectory∞curacyofIhe
mIlipIllator
with
without、ribmtionsupp陀ssion
is锄lyzed.The
resultsshowthatthereliabilityofthekinematic
tmjectoryaccumcyofthe
眦nipulator
beimpmvedwit}Ithehelpofvibmtionsuppres8ion.
Key
words:Par棚elMaIIipIllatorVmmti帅Su坤re辎i伽TrajectoryAc饥ncyReIiability
并联机器人具有刚度大、运动精度高等优点而被广泛使用在航天工业和制造业中…。
为了获得更高的运动速度和加速度,轻质量连接杆的机器人被使用,但同时却造成了系统振动,影响了运动精度。
多种方法可以抑制柔性杆的振动,例如选用刚性或阻尼更大的材料【2.”。
近十几年,利用智能结构抑制柔性系统的振动被越来越重视,一个智能结构包含4个要素:驱动器、传感器、控制策略和动力控制装置。
压电材料能被作为智能驱动器和传感器,PzT压电材料要求更低的驱动电压,并可使用在更大的频率范围而被广泛使用¨】。
多种控制策略能实现柔性连接杆的动态振动抑制,其中应变反馈控制策略具有更宽的动态阻尼频率区域,能实现更大范围的振动抑制”】。
机器人在运动过程中产生的振动会影响其运动轨迹的精度№1。
振动越强,运动轨迹精度越差,若振动幅度超过规定值就认为机器人动态性能失效,即意味着机器人不能按照预定的轨迹运动。
当使用PzT振动控制系统后,能明显抑制机器人的振动,提高运动轨迹精度。
机器人运动轨迹精度可靠性研究的主要任务是评价机器人运动可靠度及其机构动态精度,对机器人的
★国家863高技术研究发展计划项目(编号:2007AA042428)科技部重大专项资助项目(编号:2009zx04013)收稿日期:2010年4月
器
机械制造48卷第554期
运动精度作出合理的可靠性预计。
因此,机器人运动轨迹精度的可靠性研究具有重要的意义。
1机器人模型
如图1,这种三自由度(3一DOF)并联机器人由3个对称布置的连接杆以封闭形式组成,每一组连接杆机构都由一个直线位移约束和两个转动约束组成n1。
机器人使用了比较轻的连接杆,能够获得更快的运动速度和加速度,但系统却产生了振动,而且使运动轨迹的精度降低。
机器人的系统坐标系,如图2所示,其中标出了连
20lO/lO
囤
万方数据
万方数据
万方数据
万方数据
一种三自由度并联机器人运动轨迹精度的可靠性研究
作者:李兵, 张晓瑾, 谢里阳, 魏玉兰
作者单位:东北大学,机械工程与自动化学院,沈阳,110004
刊名:
机械制造
英文刊名:MACHINERY
年,卷(期):2010,48(10)
1.刘唯信机械可靠性设计 1996
2.Shi Z;Li F Reliability-based Analysis and Synthesis of Mechanical Error for Path Generating Linkages 1997(02)
3.徐卫良;邓家贤;吴慈生确定连杆机构运动误差的矩阵法 1986(03)
4.X Zhang Vibration Control of Elastodynamic Response of a 3-PRR Flexible Parallel Manipulator Using PZT Transducers 2008
5.H Sumali;K Meissner;H H Cudney A Piezoelectric Array for Sensing Vibration Modal Coordinates 2001
6.B Li;X Zhang Vibration Suppression of a 3-PRR Flexible Parallel Manipulator Using Input Shaping 2009
7.L C Wu;F C Sun Optimal Trajectory Planning of Flexible Space Robot for Vibration Reducing 2003
8.G Song;S P Schmidt Active Vibration Suppression of a Flexible Structure Using Smart Material and Modular Control Patch 2000
9.A Preumont Vibration Control of Active Structures.An Introduction 2002
10.X M Zhang;Y W Shen;H.Z.Liu Optimal Design of Flexible Mechanisms with Frequency Constraints 1995
11.A Ghazavi;F Gardanine;N G Chalhout Dynamic Analysis of a Composite Material Flexible Robot Arm 1993
12.D L Lei;Q Yang Reliable Sensitivity Analysis of Kinematics for a New Parallel Manipulator 2009
1.张德虎.胡天链.刘兴岩.ZHANG De-hu.HU Tian-lian.LIU Xing-yan手动机器人设计与可靠性分析[期刊论文]-装备制造技术2005(1)
2.崔世钢.龚进峰.彭商贤.王俊松基于混合智能算法的三自由度移动机器人的路径规划[期刊论文]-制造业自动化2004,26(2)
3.袁媛.王之栎.祝明.宗光华大型不规则曲面加工机器人系统控制设计[期刊论文]-北京航空航天大学学报2004,30(4)
4.苏永涛.仉俊峰.仉立军.Su Yongtao.Zhang Junfeng.Zhang Lijun动态检测与容错机器人[期刊论文]-东北林业大学学报2007,35(6)
5.李廷春.李琳.张铁.Li Tingchun.Li Lin.Zhang Tie基于可靠性分析的机器人系统故障维修系统[期刊论文]-现代制造工程2006(12)
6.周瑾.刘勇.林吉凯.徐龙祥磁流变阻尼器与磁悬浮系统并联隔振研究[期刊论文]-武汉理工大学学报(信息与管理工程版)2010,32(2)
7.李振波.陈佳品毫米级微型装配机器人虚拟绕组定位精度控制方法研究[期刊论文]-高技术通讯2004,14(12)
本文链接:/Periodical_jxzz201010002.aspx。