计算机控制技术实验指导书
- 格式:doc
- 大小:77.00 KB
- 文档页数:6
计算机测控技术实验指导书正⽂实验⼀A/D、D/A转换应⽤实验⼀、实验⽬的1. 掌握A/D、D/A转换的实现⽅法;2. 熟悉计算机测控系统中数据输⼊/输出通道的硬件设计原理;3. 熟悉计算机测控系统中数据输⼊/输出通道A/D、D/A转换的软件实现原理。
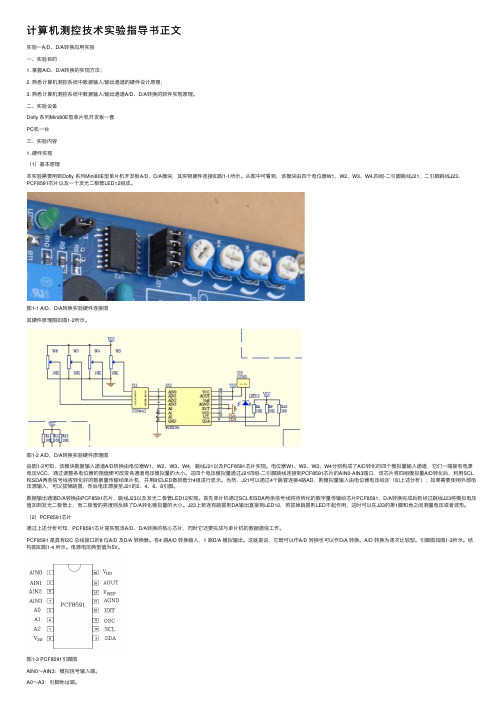
⼆、实验设备Dofly 系列Mini80E型单⽚机开发板⼀套PC机⼀台三、实验内容1. 硬件实现(1)基本原理本实验需要⽤到Dofly 系列Mini80E型单⽚机开发板A/D、D/A模块,其实物硬件连接如图1-1所⽰。
从图中可看到,该模块由四个电位器W1、W2、W3、W4,四组-⼆引脚跳线J21,⼆引脚跳线J23、PCF8591芯⽚以及⼀个发光⼆极管LED12组成。
图1-1 A/D、D/A转换实验硬件连接图其硬件原理图如图1-2所⽰。
图1-2 A/D、D/A转换实验硬件原理图由图1-2可知,该模块数据输⼊通道A/D转换由电位器W1、W2、W3、W4,跳线J21以及PCF8591芯⽚实现。
电位器W1、W2、W3、W4分别构成了A/D转化的四个模拟量输⼊通道,它们⼀端接有电源电压VCC,通过调整各电位器的阻值便可改变各通道电压模拟量的⼤⼩。
这四个电压模拟量通过J21四组-⼆引脚跳线连接到PCF8591芯⽚的AIN0-AIN3端⼝,该芯⽚将四组模拟量A/D转化后,利⽤SCL 和SDA两条信号线将转化好的数据量传输给单⽚机,并⽤8位LED数码管分4组进⾏显⽰。
当然,J21可以通过4个跳冒连接4路AD,则模拟量输⼊由电位器电压给定(如上述分析);如果需要使⽤外部电压源输⼊,可以拔掉跳冒,然后电压源接⾄J21的2、4、6、8引脚。
数据输出通道D/A转换由PCF8591芯⽚、跳线J23以及发光⼆极管LED12实现。
⾸先单⽚机通过SCL和SDA两条信号线将待转化的数字量传输给芯⽚PCF8591,D/A转换完成后则经过跳线J23将模拟电压值加到发光⼆极管上,⽽⼆极管的亮度则反映了D/A转化模拟量的⼤⼩。

计算机控制技术实验指导书(第2版)于军琪郭春燕普亮编写建筑科技大学信控学院信息技术实验中心2009年3月目录1 课程简介、实验项目及学时安排 (1)1.1课程简介 (1)1.2实验项目及学时安排 (1)2 实验仪器仪表设备简介 (2)2.1自动控制原理实验箱 (2)2.2其它实验设备 (3)3 计算机控制技术课程实验 (4)3.1实验1采样与保持实验 (4)3.2实验2数字PID控制实验 (8)3.3实验3直流电机闭环调速实验 (14)3.4实验4模拟/数字温度闭环综合控制实验 (19)3.5实验5工控机组态实验 (23)3.6实验6模/数、数/模转换试验 (30)1 课程简介、实验项目及学时安排1.1 课程简介本课程是自动化专业的主干专业课程,是以应用为主的工程技术类课程。
本课程的目的在于培养及提高学生对微机原理与接口技术的知识,了解掌握数字PID控制器的程序实现方法,为掌握计算机综合应用能力打好基础。
通过对计算机控制技术课程容的学习与教学实验仪器的结合,上机实践汇编语言文件的建立、汇编和调试,计算机控制系统搭建方法的学习,使学生达到以下要求:1.掌握汇编语言常用指令,熟悉汇编语言和c语言混合编程;2.掌握计算机的接口技术;3.掌握数字PID控制器的程序实现方法。
1.2 实验项目及学时安排计算机控制技术实验课是以认识和熟悉微机原理与接口技术和模拟验证所学理论为基础,在此基础上开展自行设计系统、确定实验方案和实验线路,进行自主实验,学习系统分析和系统设计的思维方法,培养研究系统的能力。
所安排了验证性和综合性不同属性的实验项目。
2 实验仪器仪表设备简介2.1 自动控制原理实验箱自控/计控原理实验机由以下七个模块组成: 1. 自动控制原理实验模块 2. 计算机控制原理实验模块 3. 信号源模块 4. 控制对象模块 5. 虚拟示波器模块 6. 控制对象输入显示模块 7. CPU 控制模块各模块相互交联关系框图如图2.1所示:RS232接口图2.1 各模块相互交联关系框图自动控制原理实验模块由六个模拟运算单元及元器件库组成,这些模拟运算单元的输入回路和反馈回路上配有多个各种参数的电阻、电容,因此可以完成各种自动控制模拟运算。

《计算机控制技术及仿真》实验指导《计算机控制技术及仿真》实验指导学⽣姓名:学⽣学号:院(系):机械⼯程学院年级专业:指导教师:⼆〇〇⼀四年⼗⼆⽉实验1 Matlab环境语法及数学运算(验证性实验)⼀、实验⽬的1、掌握 Matlab 软件使⽤的基本⽅法;2、熟悉 Matlab 的数据表⽰、基本运算⽅法;3、熟悉 Matlab 绘图命令及基本绘图控制。⼆、实验仪器与软件1. PC机 1台2. MATLAB6.X环境三、实验原理MATLAB环境是⼀种为数值计算、数据分析和图形显⽰服务的交互式的环境。MATLAB有3种窗⼝,即:命令窗⼝(TheCommand Window)、m-⽂件编辑窗⼝(The Edit Window)和图形窗⼝(The Figure Window),⽽Simulink另外⼜有Simulink 模型编辑窗⼝。
1.命令窗⼝(The Command Window)当MATLAB启动后,出现的最⼤的窗⼝就是命令窗⼝。⽤户可以在提⽰符“>>”后⾯输⼊交互的命令,这些命令就⽴即被执⾏。在MATLAB中,⼀连串命令可以放置在⼀个⽂件中,不必把它们直接在命令窗⼝内输⼊。在命令窗⼝中输⼊该⽂件名,这⼀连串命令就被执⾏了。因为这样的⽂件都是以“.m”为后缀,所以称为m-⽂件。
2.m-⽂件编辑窗⼝(The Edit Window)我们可以⽤m-⽂件编辑窗⼝来产⽣新的m-⽂件,或者编辑已经存在的m-⽂件。在MATLAB主界⾯上选择菜单“File/New/M-file”就打开了⼀个新的m-⽂件编辑窗⼝;选择菜单“File/Open”就可以打开⼀个已经存在的m-⽂件,并且可以在这个窗⼝中编辑这个m-⽂件。
四、实验内容:1、帮助命令使⽤ help 命令,查找 sqrt(开⽅)函数的使⽤⽅法;2、矩阵运算(1)矩阵的乘法已知 A=[1 2;3 4]; B=[5 5;7 8];求 A^2*B>> A^2*Bans =105 115229 251(2)矩阵除法已知 A=[1 2 3;4 5 6;7 8 9];B=[1 0 0;0 2 0;0 0 3];A\B,A/B>> A\BWarning: Matrix is close to singular or badly scaled.Results may be inaccurate. RCOND = 2.203039e-018.ans =1.0e+016 *0.3152 -1.2609 0.9457-0.6304 2.5218 -1.89130.3152 -1.2609 0.9457>> A/Bans =1.0000 1.0000 1.00004.0000 2.5000 2.00007.0000 4.0000 3.0000(3)矩阵的转置及共轭转置已知 A=[5+i,2-i,1;6*i,4,9-i];求 A.', A'>> A.'ans =5.0000 + 1.0000i 0 +6.0000i2.0000 - 1.0000i 4.00001.0000 9.0000 - 1.0000i>> A'ans =5.0000 - 1.0000i 0 -6.0000i2.0000 + 1.0000i 4.00001.0000 9.0000 + 1.0000i(4)使⽤冒号选出指定元素已知: A=[1 2 3;4 5 6;7 8 9];求 A 中第 3 列前 2 个元素;A 中所有列第 2,3 ⾏的元素;>> A(1:2,3)ans =36>> A(2:3,:)ans =4 5 67 8 9(5)⽅括号[]⽤ magic 函数⽣成⼀个 4 阶魔术矩阵,删除该矩阵的第四列>> A=magic(4)A =16 2 3 135 11 10 89 7 6 124 14 15 1>> A(:,4)=[]A =16 2 35 11 109 7 64 14 153、多项式(1)求多项式 p(x) = x3 + 2x+ 4的根>> P=[1 0 2 4]P =1 02 4>> r=roots(P)r =0.5898 + 1.7445i0.5898 - 1.7445i-1.1795(2)已知 A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4] ,求矩阵 A 的特征多项式;>> B=poly(A)B =1.0000 -6.9000 -77.2600 -86.1300 604.5500求特征多项式中未知数为 20 时的值;>> polyval(B,20)ans =7.2778e+004把矩阵 A 作为未知数代⼊到多项式中;4、基本绘图命令(1)绘制余弦曲线 y=cos(t),t∈[0,2π]t=0:pi/100:2*pi;y=cos(t);plot(t,y)

常熟理工学院电气与自动化工程学院计算机控制技术实验指导书2012年2月实验一键盘显示实验一、实验目的1、通过此实验使学生了解矩阵键盘和数码管静态显示的工作原理;2、掌握矩阵键盘的编程方法,并能够将编写的C语言程序应用到单片机系统中。
二、实验仪器1、PC机一台;2、ZYMCU02主机模块、显示与键盘模块、ISP转USB下载线一根;3、导线若干。
三、实验原理及步骤1.实验原理矩阵键盘常用于按键数目较多的情况,这样可以更多的节省计算机I/O口的占用量,其原理图如图1-1所示。
HOR1HOR2HOR3HOR4VER1VER2VER3VER4图1-1 矩阵键盘对于矩阵键盘常用的扫描方法为线反转查询法。
反转法的特点是:行线和列线都要通过上拉电阻接+5V,如图1-1所示(图中公共端要接上+5V),按键所在行号和列号分别由两步操作判定:第一步,将行线编程为输出线,列线编程为输入线,并使输出线输出全“0”,则列线中电平由高到低的所在列为按键所在列。
第二步,将行线编程为输入线,列线编程为输出线,并使输出线输出全“0”,则行线中电平由高变到低的所在行为按键所在行。
反转法只要经过两步就能获得此按键所在的行列值。
2.实验内容及步骤本次实验要求编程实现用数码管显示矩阵键盘所按下对应的按键值。
其实验步骤如下:(1)用导线将主台体上的±15V电源引入到单片机显示与键盘模块上,+5V电源引入到ZYMCU02主机模块上。
(2)将主机模块的P0.7~P0.0对应与HOR1~VER4相连,P2.0~P2.7对应于A1~DP1相连。
(3)按要求在“KEIL”软件环境中编写程序,编译完成后生成Hex文件,并下载到单片机中。
(4)上电后,观察实验现象与如期是否一致。
(5)实验完毕,关闭所有电源,拆除导线并放置好。
四、实验报告要求1、实验报告书写的程序完整清晰。
2、思考题:矩阵式键盘除了反转查询法外,还有其它的方法可以实现矩阵键盘的扫描吗?请编程实现该种矩阵式键盘识别方式。

计算机控制技术实验指导书2015版实验⼀直流电动机建模及仿真实验 (1)1实验⽬的 (1)2实验设备 (1)3实验原理及实验要求 (2)3.1实验原理 (2)3.2实验要求 (3)实验⼆考虑结构刚度时的直流电动机-负载建模及仿真实验 (6)1实验⽬的 (6)2实验设备 (6)3实验原理及实验要求 (6)3.1实验原理 (6)3.2实验要求 (8)实验三步进电机控制实验 (9)1、实验⽬的 (9)2、实验仪器与设备 (9)3、实验内容 (9)4、实验原理 (10)5、实验步骤 (11)实验⼀直流电动机建模及仿真实验1实验⽬的(1)了解直流电动机的⼯作原理;(2)了解直流电动机的技术指标;(3)掌握直流电动机的建模及分析⽅法;(4)学习计算直流电动机频率特性及时域响应的⽅法。
2实验设备(1)⼯作机:ADM Athlon(tm) II X2 245,2.91GHz,1.75GB内存,250GB硬盘;(2)⼯具软件:操作系统:Windows 7;软件⼯具:MATLAB2008a 3实验原理及实验要求3.1实验原理直流电机电枢回路的电路⽅程是:a diu E iRa Ladt-=+ (1) 其中,a u 是加到电机两端的电压;E 是电机反电势;i 是电枢电流; Ra 是电枢回路总电阻; La 是电枢回路总电感;l LaT Ra=称为电枢回路电磁时间常数。
并且反电动势E 与电机⾓速度m ω成正⽐:e m e m E k k ωθ== (2)其中,e k 称为反电势系数;m θ为电机轴的转⾓。
对于电机⽽⾔,其转动轴上的⼒矩⽅程为:m l m m m m k i M J J ωθ-== (3)其中,m k 是电机的⼒矩系数;l M 是负载⼒矩;m J 是电机电枢的转动惯量。
对式(1.1)、(1.2)、(1.3)进⾏拉⽒变换得到:()()(()())()()()()l e m m l m m Ua s E s Ra I s T I s s E s k s k I s M J s sθθ-=+??=??-=? (4) 由此⽅程组可以得到相应的电动机数学模型的结构框图:1Jm1s1ek lM ImθUa+-E-+mθ图1直流电动机数学模型结构框图3.2实验要求(1)根据电机的⼯作原理(电压平衡⽅程、⼒矩平衡⽅程)建⽴从电枢电压a u 到转速m θ的传递函数模型,并根据表1所给电机参数求其频率特性。
机电系统计算机控制课程实验指导书电子科技大学机械电子工程学院目录实验一、采样控制实验 (3)实验二二阶PID控制 (10)实验三最少拍控制系统 (17)1.自控/计控原理实验机介绍信号源模块如图1所示,斜坡、阶跃、正弦和矩形波由插孔OUT1输出,非线性、微分脉冲和正弦波由插孔OUT2输出,该模块可同时发生两种不同类型信号,信号源参数(如幅度、频率、宽度、斜率、扰动等)在电脑上模拟示波器软件界面上由用户设置(每个实验范例都有其默认值),如图6中红框所示。
图1 信号源模块图2 基准电源模块和数据采集模块图2中是实验箱的基准电源模块和数据采集模块。
数据采集模块为虚拟示波器采集信号,虚拟示波器有四个信号输入通道,可将需要观察的波形接入任意一个输入口,就可通过软件观察到波形。
需要特别注意的地方是:虚拟示波器会限幅,只能显示+5V~-5V之间的波形,超出该范围的信号则对应输出为+5V或-5V。
图3 频率特性测试模块图4 控制器模块图5 运算放大器模块图3中式频率特性测试模块,插孔ADIN为测试信号输入,将系统的输出信号接入该插孔。
图4中是控制器模块,插孔AOUT1和AOUT2为信号输出孔,输出的是采样控制或PID控制信号。
图5是运算放大器模块,该模块有多个电阻可选。
插孔H1、H2和IN为运放的输入端。
插孔IN直接接入运放反相输入端,未接任何电阻;插孔H2通过固定电阻后接入运放反相输入端;插孔H1有多个电阻可选,白色的连线相当于电路线,两个连在一起的黑色排针是断开的;确定使用哪一个阻值的电阻后,用短解套连接该电阻左边的排针即可。
通过短解套可选用不同阻值的电阻,不同电容值的电容,就可控制增益和时间常数。
双击桌面图标打开软件,出现实验机实验项目选择界面如图6所示,点击蓝色框中串口右边的下拉按钮,如右图所示,若出现其他串口,则选择其中的任一串口(如果没有其他串口,则不用修改),则会出现通讯成功的界面,如图7所示。
图6实验机实验项目选择界面图7通讯成功界面②打开系统颜色设置按钮,如图6中红色框中的按钮,将坐标轴、背景色、测量文字和测量线改成下图中的颜色,如图8所示,然后点击确定键。
实验一计算机控制系统实验装置概述实验第一章硬件设备的介绍PCT-I型过程控制实验装置是基于工业过程物理模拟对象,它集自动化仪表技术,计算机技术,通讯技术,自动控制技术为一体的多功能实验装置。
系统包括流量、温度、液位、压力等热工参数,可实现系统参数辨识、单回路控制、串级控制、前馈控制、比值控制等多种控制形式。
本装置还可根据用户的需要设计构成DDC、DCS、PLC、FCS、TCS等多种控制系统。
该实验装置既可作为本科、专科、高职过程控制课程的实验装置,也可作为研究生及科研人员在复杂控制系统、先进控制系统研究方面提供物理模拟对象和实现手段。
第一节水箱实验装置由被控对象和控制回路两部分组成。
其中被控对象包括:上位水箱、下位水箱、储水箱。
上位水箱和下位水箱采用进口有机玻璃,不但坚实耐用,而且透明度高,便于学生直接观察液位的变化和记录实验结果。
水箱容积高达80升,使实验效果更为理想。
水箱结构独特,下水箱有三个槽,分别是工作槽、溢流槽、缓冲槽。
当水箱进水时,水管的水先流进缓冲槽,当缓冲槽中注满水时,水流便满过缓冲槽和工作槽当中的隔板并沿此隔板缓慢注入,这样水流对工作槽中的冲击力非常小,减少振荡,以便更精确的观察和记录实验结果。
同时下水箱的缓冲槽可以做温度变比值控制,热水和冷水在此混合,控制水的温度。
上水箱有五个水槽,两个工作槽,两个缓冲槽,一个溢流槽,两个工作槽通过连通器连接,其容积比是2:1,两个水箱都可以做液位单闭环实验,可以选择不同的工作槽做串级实验,比较不同的容积和流量组成不同的串级实验的效果。
实验过程中如水位失控水流可以直接经过缓冲槽流进储水箱。
储水箱是采用不锈钢板制成,水箱内部采用覆塑工艺,有效提高实验装置的使用寿命。
其容积180升,完全能满足上下水箱的实验的需要。
储水箱上面有一个金属滤网,有效防止异物进入水箱堵塞管道。
整个系统管道采用铝塑管组成,所有的水阀采用优质球阀,彻底避免了系统生锈的可能性,有效提高了使用装置的使用年限。
机电系统计算机控制课程实验指导书电子科技大学机械电子工程学院目录实验一、采样控制实验 (3)实验二二阶PID控制 (6)实验三消除振铃大林算法控制 (12)实验四最少拍控制系统 (19)实验一、采样控制实验一.实验目的1. 了解判断采样控制系统稳定性的充要条件,及采样周期T对系统的稳定性的影响。
2.掌握控制系统处于临界稳定状态时的采样周期T的计算。
3.观察和分析采样控制系统在不同采样周期T时的瞬态响应曲线。
二.实验原理及装置1.判断采样控制系统稳定性的充要条件线性连续系统的稳定性的分析是根据闭环系统特征方程的根在S平面上的位置来进行的。
如果特征方程的根都在左半S平面,即特征根都具有负实部,则系统稳定。
采样/保持控制系统的稳定性分析是建立在Z变换的基础之上,因此必须在Z平面上分析。
S平面和Z平面之间的关系是:S平面左半平面将映射到Z平面上以原点为圆心的单位圆内,S平面的右半平面将映射到Z平面上以原点为圆心的单位圆外。
所以采样控制系统稳定的充要条件是:系统特征方程的根必须在Z平面的单位圆内。
只要其中有一个特征根在单位圆外,系统就不稳定;当有一个根在Z 平面的单位圆上而其他根在单位圆内时,系统就处于临界稳定。
也就是说,只要特征根的模均小于1,则系统稳定;若有一个特征根的模大于1,则系统不稳定。
当采样周期设定为临界值时出现等幅振荡。
2.采样周期T对系统的稳定性的影响闭环采样控制系统原理方块图如图4-3-3所示:图1-1 闭环采样控制系统原理方块图从采样实验中知道采样输出仅在采样点上有值,而在采样点之间无值。
如其输出以前一时刻的采样值为参考基值进行外推,即可使两个采样点之间为连续信号过度。
可以完成上述功能的装置或者器件就称为保持器。
因为数/模转换器(D/A)具有两极输出锁存能力,所以具有零阶保持器的作用。
使用了采样保持器后,采样点间的信号是外推而得的,实际上已含有失真的成份,因此,采样周期信号频率过低将会影响系统的稳定性。
计 算 机 控 制 技 术
实 验 指 导 书
安阳工学院
电子信息与电气工程系
实验一 数字滤波程序设计(设计性)
一、实验目的
1 掌握数字滤波的设计方法
2 培养学生初步的MATLAB编程能力
二、实验内容
1 实验设备
带有MATLAB软件的电脑一台。
2 设计要求
运用所学的数字滤波知识,自己构造一个信号,分别加上不同的干扰信号,
并自行设计数字滤波程序(包括限幅滤波方法、中值滤波方法、算术滤波方法和
一阶滞后方法),实现滤波的功能。
3 设计目的
通过数字滤波来增强其有效信号,消除或减小各种干扰和噪声,从而提高控
制精度和系统的可靠性与稳定性。
三、实验步骤
1 限幅滤波方法:自己构造一个变化缓慢的数字序列作为输入,画图1-1,加
入随机干扰,再画图1-2,设计一段限幅滤波程序,并把滤波后的信号画在图1-3,
与图1-1进行比较,如果效果不满意,调整程序中的参数,反复调整,直至效果
令人满意为止。(要求三个子图画在一张图片上。提示:figure,subplot(1,3,
1))
2 中位值滤波方法:自己构造一个变化缓慢的数字序列作为输入,画图2-1,
加入随机干扰,再画图2-2,设计一段中位置滤波程序,并把滤波后的信号画在
图2-3,与图2-1进行比较,如果效果不满意,调整程序中的参数,反复调整,
直至效果令人满意为止。(提示:median)
3 算术平均滤波方法:自己构造一个变化较快的数字序列作为输入,画图3-1,
加入随机干扰,再画图3-2,设计一段算术平均滤波程序,并把滤波后的信号画
在图3-3,与图3-1进行比较,如果效果不满意,调整程序中的参数,反复调整,
直至效果令人满意为止。(提示:mean)
四、实验报告要求
实验完毕后,认真完成实验报告,写出设计的程序并画出相应的图。
实验二 PID控制器的设计及性能分析(设计性)
一、实验目的
1 掌握PID控制器的设计方法
2 培养学生初步的MATLAB编程能力
二、实验内容
1 实验设备
带有MATLAB软件的电脑一台。
2 设计要求
运用所学的知识,自己设计一个PID控制器,通过改变比例系数、积分系
数、微分系数,观察系统阶跃响应的变化,并分析每个系数对系统的影响。
3 设计目的
通过数字滤波来增强其有效信号,消除或减小各种干扰和噪声,从而提高控
制精度和系统的可靠性与稳定性。
三、实验步骤
例:已知某单位负反馈系统开环传递函数如下:
1
()(1)(21)KGsss
如果采用比例(P)控制器进行调节,试绘制比例系数PK分别为1、4、10、50
时的单位阶跃响应曲线,并分析比例控制器对控制系统性能的影响。
解:求解命令如下:
num=1;
den=conv([1 1],[2 1]);
Kp=1;
GK=tf(num,den);
sys=feedback(Kp*GK,1,-1)
step(sys,'b:');
hold on
gtext('Kp=1')
pause
Kp=4;
sys=feedback(Kp*GK,1,-1);
step(sys,'k-');
hold on
gtext('Kp=4')
pause
Kp=10;
sys=feedback(Kp*GK,1,-1);
step(sys,'g--');
hold on
gtext('Kp=10')
pause
Kp=50;
sys=feedback(Kp*GK,1,-1);
step(sys,'r-');
gtext('Kp=50')
title('比例控制性能分析')
xlabel('时间(秒)')
ylabel('幅值')
执行上述命令后,可得到不同比例系数下闭环系统单位阶跃响应曲线,如下
图所示,从图纸可以看出,随着比例系数的增加,闭环系统稳态误差减小,上升
时间缩短,调节次数增大,最大超调量增大,而且闭环系统稳态误差无法消除。
实验内容:
1.已知某单位负反馈系统开环传递函数如下:
1
()(1)(2)KGsss
如果采用比例积分(PI)控制器进行调节,试绘制比例系数PK=1,积分系数分
别为0.2、0.8、1.4、2.0、5时的单位阶跃响应曲线,并分析积分控制环节对控制
系统性能的影响。
2. 已知某单位负反馈系统开环传递函数如下:
1
()(1)(42)KGsss
如果采用比例积分(PI)控制器进行调节,试绘制比例系数PK=1,微分系数分
别为0.2、1.7、3.2、10时的单位阶跃响应曲线,并分析微分控制环节对控制系
统性能的影响。
四、实验报告要求
实验完毕后,认真完成实验报告,写出设计的程序并画出相应的图。
实验三 大延迟系统的simulink建模与仿真(设计性)
一、实验目的
1 掌握微分先行和smith预估器的设计方法
2 培养学生初步的MATLAB仿真能力
二、实验内容
1 实验设备
带有MATLAB软件的电脑一台。
2 设计要求
按照要求自己用simulink仿真一个大迟延系统,并运用所学的微分先行和
smith预估器知识,分别对系统进行补偿,减小或者消除超调。
3 设计目的
通过微分先行或smith预估对系统进行补偿,减小或者消除超调。
三、实验步骤
1 系统的控制对象为1412)(0ssG,采用常规的PID控制,控制器参数为
0.6PK,6IT,1DT
。将上述系统进行仿真并用示波器观察波形。
2系统的控制对象为401()241ssGsees,采用常规的PID控制,控制器参数
为0.6PK,6IT,1DT。将上述系统进行仿真并用示波器观察波形。
3 对同一控制对象401()241ssGsees采用PID及smith预估控制,控制器参
数为0.6PK,6IT,1DT,。将上述系统进行仿真并用示波器观察波形。
4 将上述三种结果用一个示波器显示,比较三种方法的优劣。
四、实验报告要求
实验完毕后,认真完成实验报告,写出设计的程序并画出相应的图。