MATLAB电液位置伺服控制系统设计及仿真
- 格式:doc
- 大小:520.02 KB
- 文档页数:10
1 / 5 matlab的m文件中加了中文注释后,拷贝到word里是乱码,该如何解决? 方法一:先拷贝到txt中,再从txt拷贝到word中; 方法二:matlab菜单中file,File--preference-fonts--custom--你选editor然后旁边选
custom,然后找你的字体吧。
利用matlab环境进行伺服系统仿真的通常方法有程序法和作图法: 1、 程序法
(1) 描述传递函数 设传递函数为 112112121()mmmmnnnnnbsbsbsbGssasasasa 则描述上述传递函数的语句为: 121121([,,,,],[1,,,,,])mmnnGtfbbbbaaaa (2) 串联传递函数计算 1([],[]);Gtf 求G1的传递函数 2([],[]);Gtf 求G2的传递函数 312;GGG 求串联传递函数
(3) 并联传递函数计算 1([],[]);Gtf 求G1的传递函数 2([],[]);Gtf 求G2的传递函数 312;GGG 求并联的传递函数
G1(s) G2(s) 串联传递函数框图 2 / 5
(4) 求闭环传递函数 1([],[]);Gtf 求G1的传递函数 2([],[]);Gtf 求G2的传递函数 (1,2);GBfeedbackGG闭环系数只与G1,G2相关
(5) 求阶跃响应 1([],[]);Gtf 求G1的传递函数 step(G1) 求G1的单位阶跃响应 (6) 求频率特性 1([],[]);Gtf 求G1的传递函数 bode(G1); 求G1的幅频特性和相频特性 (7) 求稳定裕度
G1(s) G2(s)
+
—闭环传递函数框图
G1(s) G2(s)
+
+ 并联传递函数框图 3 / 5 1([],[]);Gtf 求G1的传递函数 margin(G1); 求G1的幅值裕度和相位裕度 例题一:闭环传递函数与G1无关
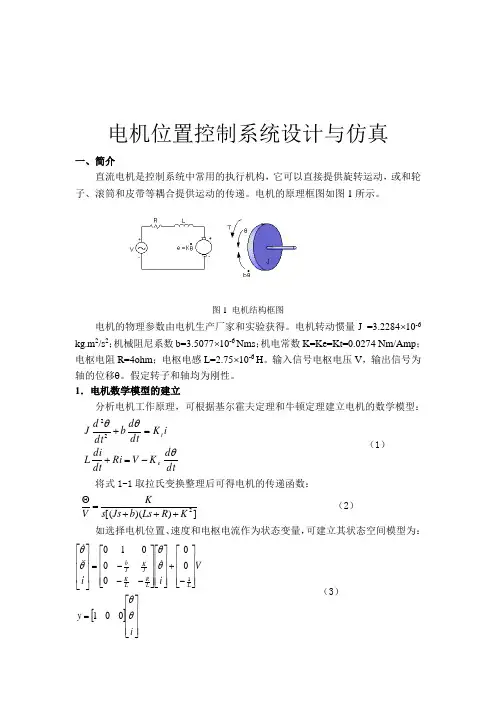
电机位置控制系统设计与仿真一、简介直流电机是控制系统中常用的执行机构,它可以直接提供旋转运动,或和轮子、滚筒和皮带等耦合提供运动的传递。
电机的原理框图如图1所示。
图1 电机结构框图电机的物理参数由电机生产厂家和实验获得。
电机转动惯量J =3.2284⨯10-6 kg.m 2/s 2;机械阻尼系数b=3.5077⨯10-6 Nms ;机电常数K=Ke=Kt=0.0274 Nm/Amp ;电枢电阻R=4ohm ;电枢电感L=2.75⨯10-6 H 。
输入信号电枢电压V ,输出信号为轴的位移θ。
假定转子和轴均为刚性。
1.电机数学模型的建立分析电机工作原理,可根据基尔霍夫定理和牛顿定理建立电机的数学模型:dt d K V Ri dt di L iK dt d b dtd Je t θθθ-=+=+22 (1)将式1-1取拉氏变换整理后可得电机的传递函数:]))([(2K R Ls b Js s K V +++=Θ (2) 如选择电机位置、速度和电枢电流作为状态变量,可建立其状态空间模型为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡i y Vi i L L R L K J K J b θθθθθθ00100000101 (3)2.设计目标希望能精确控制电机的位置,即要求电机的稳态误差为零,同时希望因扰动引起的稳态误差也能为零。
对于动态性能的要求,希望电机能较快且平稳,期望调节时间T s 为40ms ,超调量小于16%。
根据时域和频域指标的关系,可将时域性能指标转换为频率响应的约束条件。
如系统的带宽与闭环系统自然振荡频率ωn 和阻尼比ζ有关,而ζωn 与调节时间有关。
相角裕度PM 和阻尼比ζ有关,进而与超调量相关。
()()244214 24421242242+-+-=+-+-=ζζζζζζζωωS n bw T (4)zeta = -log(.16)/sqrt(pi^2+(log(.16))^2); PM = 100*zeta;wbw = (4/(0.04*zeta))*sqrt((1-2*zeta^2)+sqrt(4*zeta^4-4*zeta^2+2));得 ζ>0.503,PM>50.3 deg ,wbw>252 rad/sec 3.校正前电机开环频率响应首先用MATLAB 描述电机模型,并观察电机的开环频率特性。
基于MATLAB的电液力伺服控制系统的研究作者:暂无来源:《智能制造》 2016年第7期撰文/ 陕西国防工业职业技术学院数控工程学院曹旭妍本文根据电液力伺服控制系统的工作原理,建立其数学模型,利用MATLAB 软件为其构建仿真模型,并获得反映系统性能的仿真曲线,完成系统的静、动态分析。
基于Simulink 工具箱设计出PID 控制器,有效解决了系统本身非线性所造成的控制效果不佳的问题,仿真结果表明,该控制器满足控制系统要求,控制效果良好。
一、引言电液力伺服控制系统普遍具有精度高、响应快以及结构简单等特点,广泛应用于工业控制等领域。
但是液压伺服控制系统是非线性复杂系统,在控制精度和稳定性上不能满足要求,有时需要附加合适的控制器才能取得比较理想的控制效果。
在电液力伺服系统的设计过程中,基于Matlab 软件,能快速准确地完成系统的静、动态分析,提高了设计效率,并根据分析结果,采用Simulink 工具箱,设计出PID 控制器,该控制算法解决了电液力伺服系统的非线性,使系统的快速性、稳定性等都能满足要求,具有良好的控制效果。
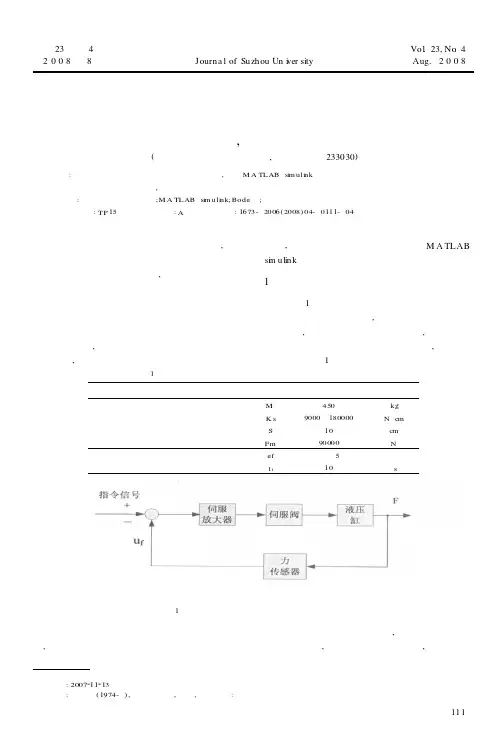
二、系统组成及数学模型的建立本文设计的电液力伺服系统实验平台主要由个人计算机、伺服阀、液压缸、测力传感器、受力对象、传感器信号单路放大器和数据采集卡所组成。
给系统输入负载力后便开始工作,使液压缸活塞杆输出负载力。
该力由测力传感器检测,转换为电压信号,由数据采集卡进行A/D转换后反馈到计算机中,与指令电压信号进行比较,计算机根据电压偏差来计算当前电压控制量,进行D/A 转换后来驱动电液伺服阀,以伺服阀开口方向和大小来控制进入液压缸的液压油的多少及方向,并作用在活塞杆上,从而使输出力达到期望值。
图1 为电液力伺服控制系统的总体框图。
根据力伺服控制系统开环传递函数及系统伯德图便可以对理想情况下的力控制系统的快、准、稳三个特性进行比较和分析:(1)系统的稳定性。
一般系统的相位裕度、幅值裕度越大系统则越稳定,由系统开环伯德图可以得知,该系统的相位裕度是91.6°,增益裕度是9.74dB,可得该力伺服控制系统是稳定的。
MATLAB控制系统设计与仿真评分:一. 原系统特性做出原系统的阶跃响应,程序和结果如下 >> clear >> clear >> num=[2 1];>> den=conv([1 0],conv([1 1],[1 2])); >>G=tf(num,den); >>step(feedback(G,1))0246810121416180.10.20.30.40.50.60.70.80.91Step ResponseTime (sec)A m p l i t u d e二.改进系统在上述程序的基础上编写如下程序>> sigma=0.3;>> zeta=((log(1/sigma))^2/((pi)^2+(log(1/sigma))^2))^(1/2) zeta =0.3579>> wn=4/3/zetawn =3.7259>> roots([1 2*zeta*wn wn^2])ans =-1.3333 + 3.4791i-1.3333 - 3.4791i>> s1=-1.3333 + 3.4791i;>> kc=6.5;>> Gc=ralead(G,s1,kc)Transfer function: 0.0456 s + 1 ------------- 0.03586 s + 1 故校正环节为03586.01)456.001(5.6++=s Gc三.校正后的系统特性 >> sys1=kc*G*Gc; >> sys=feedback(sys1,1)Transfer function:0.5928 s^2 + 13.3 s + 6.5 --------------------------------------------------0.03586 s^4 + 1.108 s^3 + 3.664 s^2 + 15.3 s + 6.5>> step(sys))Time (sec)A m p l i t u d e01234567890.20.40.60.811.21.4三. 验证由上图可知,校正环节是正确的。
控制系统的Matlab仿真与设计部分习题参考教学设计前言控制系统是现代自动化领域的重要组成部分之一。
它利用现代数学、自动控制理论、电子技术和计算机技术来研究各种对象的控制和调节方法。
本文将介绍控制系统的Matlab仿真与设计部分习题参考教学设计,希望对广大读者有所帮助。
控制系统的Matlab仿真Matlab是目前应用最广泛的数学软件之一,它具有强大的数值计算能力以及图像处理、符号计算和仿真等功能。
在控制系统的Matlab仿真中,我们可以通过该软件来模拟储能器、滤波器、条件器和电机等各种组件的工作状态,从而对控制系统的实际工作进行预测和优化。
控制系统的Matlab仿真需要掌握的基本步骤包括:建模、仿真和验证。
其中,建模是指根据控制系统的实际情况设计出相应的数学模型;仿真是指通过Matlab进行模拟计算,得到控制系统的工作状态;验证是指对仿真结果进行分析,评估控制系统的工作状态,从而优化控制系统的设计。
控制系统的设计控制系统的设计需要依据实际控制对象的特性和性能需求,选择合适的控制策略并设计相应的控制器和调节器。
通常,控制系统的设计包括控制器的选择、系统的建模、系统的仿真和调试等步骤。
控制器的选择是控制系统设计的重要环节之一。
控制器可以根据需要选择PID控制器、模糊控制器、神经网络控制器等。
系统的建模是指建立控制系统的数学模型,通常采用状态空间法、传递函数法和图论法等。
系统的仿真是通过Matlab进行模拟计算,得到控制系统的工作状态。
当控制系统设计完成后,还需要进行调试和测试,确保其稳定可靠。
习题参考教学设计控制系统的Matlab仿真与设计是自动控制专业的重要学科,也是考试中的重要内容。
为帮助学生更好地学习掌握该学科,以下提供控制系统的Matlab仿真与设计部分习题参考教学设计,供学生参考。
1.将系统的控制器换成模糊控制器,仿真比较不同控制器的控制效果。
2.建立磁浮模型,采用状态空间法求解系统的传递函数,并选取合适的调节器进行调节。
基于MATLAB的高压腔电液压力伺服控制系统设计及仿真张齐生;李亚南;吴传辉;张伯羽【期刊名称】《液压与气动》【年(卷),期】2015(000)004【摘要】电液压力伺服控制装置设计的重点和难点是建立电液压力伺服控制系统的数学模型和传递函数及开环增益系数的确定.通过设计高压润滑拉拔机的高压腔压力伺服控制系统,对数学模型和传递函数的建立做了详细介绍,并在MATLAB环境下对电液伺服控制系统进行仿真,确定出使系统稳定的开环增益.同时应用频率响应法对电液伺服控制系统的性能进行分析,从而得到满足要求且可靠的电液伺服系统参数,设计出符合要求的稳定电液压力伺服控制装置.【总页数】5页(P79-82,131)【作者】张齐生;李亚南;吴传辉;张伯羽【作者单位】燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004;燕山大学河北省重型机械流体动力传输与控制重点实验室,河北秦皇岛066004【正文语种】中文【中图分类】TH137【相关文献】1.基于AMEsim与Matlab联合仿真的电液伺服控制系统研究 [J], 郭凌龙2.基于AMESim/Matlab的电液伺服控制系统的仿真研究 [J], 邢科礼;冯玉;金侠杰;李庆3.基于MATLAB/SIMULINK的电液伺服控制系统的建模与仿真研究 [J], 胡良谋;李景超;曹克强4.一种电液伺服控制器的设计及Matlab仿真 [J], YAO Kun-shan;WANG Zhi5.高压气动系统负载容腔压力伺服控制仿真研究 [J], 何文凯; 陈紫轩; 张轶; 高隆隆; 张迪嘉; 李宝仁因版权原因,仅展示原文概要,查看原文内容请购买。
引言位置随动系统是应用非常广泛的一类工程控制系统,它属于自动控制系统中的一类反馈闭环控制系统。
随着科学技术的发展,在实际中位置随动系统的应用领域非常广泛。
随着机电一体化技术的发展,位置随动系统已成为现代工业、国防和高科技领域中不可缺少的设备,是电力拖动自动控制系统的一个重要分支。
本次设计研究的是经典的三环位置随动系统,即在转速和电流双闭环直流调速系统的基础上,增加位置环的三环位置随动系统。
位置随动系统需要实现位置反馈,所以系统结构上必定要有位置环,位置环是随动系统重要的组成部分,位置随动系统的基本特征体现在位置环上,根据给定信号与位置检测反馈信号综合比较的不同原理,位置随动系统分为模拟与数字式两类,本次设计的系统属于模拟式随动系统,本次设计选用的模型是大功率三环位置随动系统。
这种三环系统适用于大功率随动系统,特点是给定量是一个随机变化的量,要求输出量准确跟随给定量的变化,同传统的电力拖动中的调速系统一样,稳态精度和动态稳定也是系统必备的,在动态性能中,调速系统多强调抗扰性,而位置随动系统更强调快速跟随性能。
同其它的单环还是两环位置随动系统相比,这种系统优点突出,在跟随性能上,控制精度高,输出响应的灵敏性和准确性都要好于其它的随动系统,仅有输出响应的快速性不如单环位置随动系统。
然后我们要按工程法设计电流环和转速环的调节器,首先要设计的是直流双闭环调速系统,可参考电力拖动控制系统的设计方案,调节器按工程设计方法,转速和电流环都采用典型I型系统,都采用PI调节器,位置环采用PID调节器同时选用典型II型系统,可以弥补系统快速性差的不足,这种最终校正成II型系统的好处是没有系统误差。
MATLAB软件在学术和许多实际领域中都得到广泛的应用,具有强大的数学计算和绘图功能,尤其在动态系统仿真方面更有独到的优势。
它提供的动态系统仿真工具是众多仿真软件中功能最强大、最优秀、最容易实现的一种,可以有效地解决仿真技术中的一些难题。
北方民族大学学士学位论文论文题目:基于MATLAB的液位与流量串级控制系统设计与仿真院(部)名称: 电气信息工程学院专业: 电气工程及其自动化论文提交时间: 2011年5月20日论文答辩时间: 2011年5月28日学位授予时间:北方民族大学教务处制毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日摘要随着科学技术的不断进步,在现代各种复杂控制系统中,串级控制系统占有较大比重;串级控制系统是过程控制中的一种多回路控制系统,是为了提高单回路控制系统的控制效果而提出来的一种控制方案。
①MatlabxPCTargetUer’sGuide.TheMathWorks,Inc.2001.②Developer’sKitforTexasInstrumentsDSPUser’sGuide,MathworksInc.April2004.本文提出一种利用Matlab7.0的EmbeddedTargetforC2000DSP工具箱和TI公司TMS320F2812DSP的位置伺服系统在线仿真的算法设计、测试与实现方法。
1Matlab7.0实时仿真功能1.1软件平台概述Matlab软件集数据分析、算法开发为一体的集成开发环境及模块化的建模方法,从问世以来一直受到广大用户的青睐;尤其是最新版本的Matlab7.0,由于其针对编程环境、代码执行效率、数据可视化、数值计算、文件I/O等方面进行了大量升级,从而使它得到更广泛的应用。
本文仅对Matlab7.0新增的EmbeddedTargetforC2000DSP工具箱作介绍。
EmbeddedTargetforC2000DSP工具箱是一种基于实时操作台RTW(RealTimeWorkshop)的类xPC目标式在线仿真工具箱①。
xPC采用了宿主机-目标机的技术途径,即双机模式[1]。
其中,宿主机用于运行Matlab/Simulink,而目标机用于执行所生成的代码,xPC提供了一个高度浓缩型的实时操作核运行在目标机上。
双机之间的实时代码及数据传输可通过串口线、并口线或以太网等连接。
该工具箱可以将Simulink,Matlab开发的算法直接与TexasInstrumentsXpressDSP平台和C2000DSP处理器集成起来[2],进行代码自动在线生成、加速原型及嵌入式系统的开发工作。
按照代码编写集成工作台CCS(CodeComposeStudio)的项目文件要求生成TIDSP要求的C代码,自动在TIC2000系列的DSP上进行算法的验证与实时实现。
目前的Matlab7.0支持F2812eZdsp和F2407eZdsp,并且通过模块形式集成了PWM、ADC和CAN等模块②,为用户的开发和应用提供了很大的便利。
电液位置伺服控制系统设计方法电液位置伺服系统是最基本和最常用的一种液压伺服系统,如机床工作台的位置、板带轧机的板厚、带材跑偏控制、飞机和船舶的舵机控制、雷达和火炮控制系统以及振动试验台等。
在其它物理量的控制系统中,如速度控制和力控制等系统中,也常有位置控制小回路作为大回路中的一个环节电液位置伺服系统主要是用于解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量对给定量的及时和准确跟踪,并要具有足够的控制精度。
电液伺服系统的动态特性是衡量一套电液伺服系统设计及调试水平的重要指标。
它由电信号处理装置和若干液压元件组成,元件的动态性能相互影响,相互制约及系统本身所包含的非线性,致使其动态性能复杂。
因此,电液伺服控制系统的设计及仿真受到越来越多的重视。
液压伺服系统的基本设计步骤○1分析整理所需的设计参数,明确设计要求;○2拟定控制方案,构成控制系统原理图;○3确定动力元件参数(如供油压力、执行元件规格、伺服阀容量)和其他组成元件;○4分析计算系统的静、动态特性,确定回路放大系数和设计校正措施等。
○5根据技术要求设计出系统以后,需要检查所设计的系统是否满足全部性能指标,如不满足,可通过调整参数或改变系统结构(即校正)等方法重复设计过程,直至满足要求为止。
因为设计是试探性的,所以设计方法具有很大的灵活性,在设计中结合MATLAB的SIMULINK软件进行仿真,对系统的参数进行调整和可靠性作进一步验证,最终可以得出比较可靠的电液伺服系统。
(一)组成控制系统原理图由于系统的控制功率比较小、工作台行程比较大,所以采用阀控液压马达系统。
系统方块原理如图1(二)由静态计算确定动力元件参数,选择位移传感器和伺服放大器1.绘制负载轨迹图负载力由切削力c F ,摩擦力f F 和惯性力a F 三部分组成。
摩擦力具有“下降”特性,为了简化,可认为与速度无关,是定值,取最大值f F = 1500N 惯性力按最大加速度考虑a max F 800t m a N ==假定系统是在最恶劣的负载条件下工作(即所有负载力都在存在,且速度最大)下工作,则总负载力为max f F F F F =l c a =++400+1500+800=2700N2.选取供油压力 5s P 6310Pa =⨯3.求取液压马达排量设齿轮减速比'm i=/2m θθ=,丝杠导程21.210/t m r -=⨯,则所需液压马达力矩为22700 1.210 2.58222L L F t T N m i ππ-⨯⨯===⋅⨯ 取L s 2P =P 3,则液压马达弧度排量为-63L 5s 3T 3 2.58D ==0.610m /2P 26310m rad ⨯=⨯⨯⨯ 液压马达每转排量为-63-632D 20.610m / 3.710m /m m Q r r ππ==⨯⨯=⨯计算出的液压马达排量需标准化。
武汉工程大学 数控机床工作台电液位置伺服控制系统设计及仿真
姓名:*** 专业:机械电子工程 子方向:机电一体化 武汉工程大学机电液一体化实验室 武汉工程大学 位置伺服系统是一种自动控制系统。因此,在分析和设计这样的控制系统时,需要用自动控制原理作为其理论基础,来研究整个系统的动态性能,进而研究如何把各种元件组成稳定的和满足稳定性能指标的控制系统。若原系统不稳定可通过调整比例参数和采用滞后校正使系统达到稳定,并选取合适的参数使系统满足设计要求。 1 位置伺服系统组成元件及工作原理 数控机床工作台位置伺服系统有不同的形式,一般均可以由给定环节、比较环节、校正环节、执行机构、被控对象或调节对象和检测装置或传感器等基本元件组成[1]。根据主机的要求知系统的控制功率比较小、工作台行程比较大,所以采用阀控液压马达系统。 系统物理模型如图1所示。
图1 数控机床工作台位置伺服系统物理模型
系统方框图如图2所示。
图2 数控机床工作台位置伺服系统方框图 数控机床工作台位置伺服系统是指以数控机床工作台移动位移为控制对象的自动控制系统。位置伺服系统作为数控机床的执行机构,集电力电子器件、控制、驱动及保护为一体。数控机床的工作台位置伺服系统输出位移能自动地、快速而准确地复现输入位移的变化,是因为工作台输出端有位移检测装置(位移传感器)将位移信号转化为电信号反馈到输入端构成负反馈闭环控制系统。反馈信号与输入信号比较得到差压信号,然后把差压信号通过伺服放大器转化为电流信号,送入电液伺服阀(电液转换、功率放大元件)转换为大功率的液压信号(流量与压力)输出,从而使液压马达的四通滑阀有开口量就有压力油输出到液压马达,驱动液压马达带动减速齿轮转动,从而带动滚珠丝杠运动。因滚珠丝杠与工作台相连所以当滚珠丝杠 运动时,工作台也发生相应的位移。
2数控工作台的数学模型 2.1 工作台负载分析
工作台负载主要由切削力cF,摩擦力fF和惯性力aF三部分组成,则总负载力为:
afcLFFFF 武汉工程大学 2.2液压执行机构数学模型 工作台由液压马达经减速器和滚珠丝杠驱动。
根据力矩平衡方程,减速器输入轴力矩LT为:
itFTLL2 式中:t为丝杠导程,m/r ;i为减速器传动比,'/mmi,m,'m分别为齿轮减速器输入轴、输出轴角位移,rad。 由运动传递原理知,液压马达最大转速maxn为:
tivnmaxmax
式中:maxv为工作台的最大运动速度,m/s。 由液压马达输出力矩表达式可知,液压马达所需排量mQ为:
LLmmpTDQ/22
式中:Lp为液压马达负载压力,MPa,一般取3/2sLpp,sp为液压系统压力,MPa;mD
为液压马达弧度排量,rad/m3。 液压马达负载流量为:maxnQqmL 伺服阀压降Vp为:LsVppp 考虑泄漏等影响,Lq可以增大10~20%,根据Lq和Vp,查手册得额定流量,选择合适的液压泵和电液伺服阀。 阀控马达液压伺服系统模型:
(1)伺服阀的线性流量方程为:LcvqLpKxKQ 位置伺服系统动态分析经常是在零位工作条件下进行的,此时增量和变量相等。 式中参数:qK为阀的流量增益;cK为阀的流量压力系数,vx为滑阀阀芯的位移;Lp为负
载压力,21pppL (2)液压马达的流量连续性方程:
LetLimmmLspVpCsDQ4 武汉工程大学 式中参数:mD液压马达的体积排量;m液压马达的角位移;imC液压马达的内泄露系数;e
系统的有效体积弹性模量 (3)液压马达的力矩平衡方程:
LmmmmtmLTGsBsJDp
式中参数:tJ为液压马达运动部分(包括折算到液压马达轴上)负载的总惯量;mB为液压马达粘性阻尼系数;G为负载的扭转弹簧刚度;LT作用于液压马达轴上的任意外负载力矩。 工作台质量折算到液压马达轴的转动惯量为:
2224itm
Jtt
考虑到齿轮、丝杆和液压马达的惯性,tJ可适当放大20~50%。 2.3电液伺服控制系统的传递函数 放大器的增益aK为:
eaU
IK
式中:I为输出电流,A;eU为输入电压,V。 液压固有频率为:
ttmehJV
D24
式中:tV为液压马达的容积,3m。 液压阻尼比为:
ttemchVJDK0
假定阻尼比仅由阀的流量—压力系数产生。零位流量—压力系数0cK可近似计算为: 3220csccwrpq
K
阀控马达的传递函数: 武汉工程大学
1241222sss
TsKVDKxD
K
hhhLceetmcevm
q
m
如此,以阀芯位移为vx输入,以液压马达的角位移m为输出的传涕函数为:
1222sss
DKxhhh
mqvm
以负载力矩为LT输入,以液压马达的角位移m为输出的传递函数为:
1241222sss
sKVD
K
Thhh
ceetm
ce
Lm
因为负载特性没有弹性负载,因此液压马达和负载的传递函数为:
12/1220sss
Dq
hhh
mm
电液伺服阀的传递函数: 力反馈两级电液伺服阀的传递函数可以表示为:
12220ssKIQ
svsvsvsv
式中:sv以及sv由伺服阀生产商给出数据。 空载流量0q为:Vsnppqq0
阀的额定流量增益svK为:nmsvIqK0 式中,mq0为所查样本阀处于最大阀压差时的空载流量,s/m3。 武汉工程大学 减速齿轮与丝杠的传递函数为: itxKmps2 位移传感器和放大器的动态特性可以忽略,其传递函数可以用它们的增益表示。 传感器增益fK为:pffxUK
式中:fU为反馈电压信号;px为工作台位移。 根据以上确定的传递函数,可绘制出数控机床工作台位置伺服系统的模型如图3所示。 图3见草稿。 故系统的开环传递函数为:
12122222sssss
KsHsG
hhhsvsvsvv
式中:开环增益系数vK为:mfssvavDKKKKK/ 2.4系统的技术要求: “位置”误差mm05.0pfpee(指令或干扰为“位置”输入);
“速度”误差mm1ve(指令为“速度”输入,即斜坡输入); 频带宽度Hz103dBf。 3仿真实验 3.1仿真实验参数 仿真实验已知参数见如下:
N400cF;N1600fF;s/m08.0maxv;2maxs/m2.1a;kg800tm;
r/m102.12t;2i;pa10635sp;36m1010tV;m1051.22w;
m1056cr;pa108.12;s/rad600sv;5.0sv;100fK;1aK。
3.2仿真传递函数的确定 将已知参数代入2中各式,计算各项后,可得 伺服阀的传递函数为:
16005.026001042172260ssI
Q 武汉工程大学 负载特性没有弹性负载时液压马达和负载的传递函数为:
135734.1235710484.12260sssq
m
系统的开环传递函数为:
135768.23571600160026.5982222sssss
sHsG
根据以上确定的传递函数,用Simulink可绘制出数控机床工作台位置伺服系统的模型如图4所示。
图4数控机床工作台位置伺服系统模型 3.3仿真实验结果分析 3.3.1系统稳定性
根据系统开环传递函数做出1aK时仿真Bode图(如图5),增益裕量dB82.4mG,
相位裕量26mP均为负值,此时系统不稳定。 为了使系统稳定,考虑将图中0dB线上移,使相位裕量50,此时增益裕量dB7.11gK,穿越频率79.7rad/s,由dB39lg20vK,得开环增益为:90vK,故放
大器增益为:15.026.5989026.598vaKK 上式计算出的aK为校正后的值,下面做出15.0aK时开环系统的Bode图,如图6。 可以看出:增益裕量dB5.11mG,相位裕量50mP均为正值,此时系统稳定。 所以15.0aK就是所求的放大器增益。