3自由度并联机器人构型综合 杨国彬
- 格式:dps
- 大小:886.00 KB
- 文档页数:17
气动3-UPU型机器人位姿控制# 气动3-UPU型机器人位姿控制## 引言随着工业自动化的不断进步,机器人技术在各个领域中扮演着越来越重要的角色。
气动机器人作为一种成本效益高、维护简单的自动化设备,广泛应用于装配、搬运、喷涂等工业生产环节。
3-UPU型机器人是一种典型的并联机器人结构,其位姿控制的精确性直接影响到作业的质量和效率。
本文将探讨气动3-UPU型机器人的位姿控制技术。
## 气动3-UPU型机器人结构概述3-UPU型机器人的基本结构由三个独立驱动的平行四边形(UPU)组成,每个UPU由一个驱动杆和两个平行的连杆构成。
这种结构使得机器人能够在三维空间中实现灵活的位姿调整。
气动驱动系统为机器人提供动力,通过控制气压的变化来实现对机器人位姿的精确控制。
## 位姿控制原理位姿控制是指对机器人末端执行器的位置和姿态进行精确控制。
对于3-UPU型机器人,位姿控制通常涉及到六个自由度:三个位置坐标(X、Y、Z)和三个姿态角(偏航角、俯仰角、滚转角)。
通过数学模型,可以将末端执行器的位姿转化为驱动杆的位移,进而实现对气压的控制。
## 控制系统设计控制系统的设计是实现位姿控制的关键。
通常采用闭环控制策略,通过传感器实时监测末端执行器的位姿,并与预设的目标位姿进行比较,计算出控制误差。
然后,根据控制算法调整气压,使末端执行器的位姿逼近目标位姿。
### 传感器选择传感器是控制系统的眼睛,其精度直接影响到控制效果。
常用的传感器包括位移传感器、角度传感器和力传感器。
位移传感器用于测量驱动杆的位移,角度传感器用于测量连杆的角度变化,而力传感器则用于监测末端执行器所受的外力。
### 控制算法控制算法是实现位姿控制的大脑。
常用的控制算法有PID控制、模糊控制和神经网络控制等。
PID控制以其简单、鲁棒性强而被广泛应用于工业控制领域。
模糊控制和神经网络控制则能够处理更为复杂的非线性控制问题。
## 实验与仿真为了验证控制系统的有效性,通常需要进行实验和仿真。
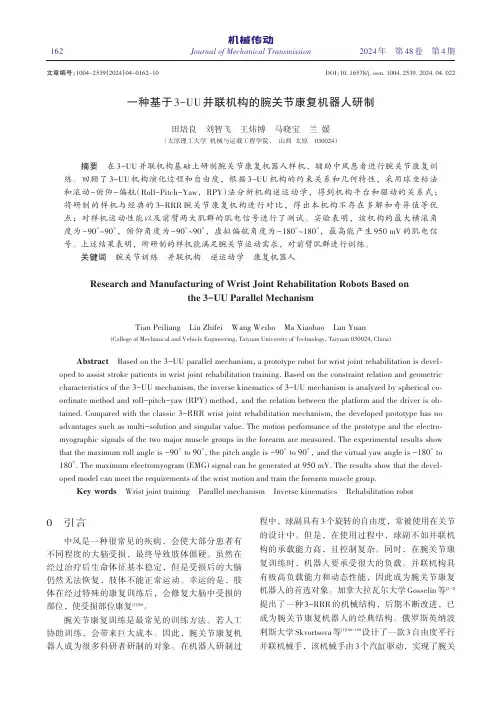
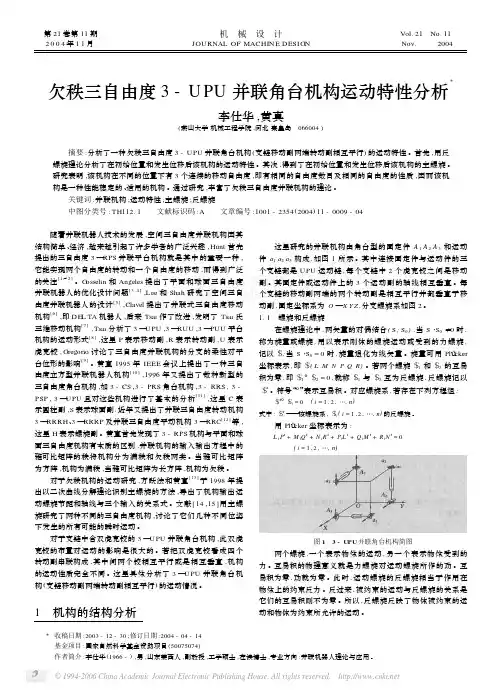
2024年第48卷第4期Journal of Mechanical Transmission一种基于3-UU并联机构的腕关节康复机器人研制田培良刘智飞王炜博马晓宝兰媛(太原理工大学机械与运载工程学院,山西太原030024)摘要在3-UU并联机构基础上研制腕关节康复机器人样机,辅助中风患者进行腕关节康复训练。
回顾了3-UU机构演化过程和自由度,根据3-UU机构的约束关系和几何特性,采用球坐标法和滚动-俯仰-偏航(Roll-Pitch-Yaw,RPY)法分析机构逆运动学,得到机构平台和驱动的关系式;将研制的样机与经典的3-RRR腕关节康复机构进行对比,得出本机构不存在多解和奇异值等优点;对样机运动性能以及前臂两大肌群的肌电信号进行了测试。
实验表明,该机构的最大横滚角度为-90°~90°,俯仰角度为-90°~90°,虚拟偏航角度为-180°~180°,最高能产生950 mV的肌电信号。
上述结果表明,所研制的样机能满足腕关节运动需求,对前臂肌群进行训练。
关键词腕关节训练并联机构逆运动学康复机器人Research and Manufacturing of Wrist Joint Rehabilitation Robots Based onthe 3-UU Parallel MechanismTian Peiliang Liu Zhifei Wang Weibo Ma Xiaobao Lan Yuan(College of Mechanical and Vehicle Engineering, Taiyuan University of Technology, Taiyuan 030024, China)Abstract Based on the 3-UU parallel mechanism, a prototype robot for wrist joint rehabilitation is devel⁃oped to assist stroke patients in wrist joint rehabilitation training. Based on the constraint relation and geometric characteristics of the 3-UU mechanism, the inverse kinematics of 3-UU mechanism is analyzed by spherical co⁃ordinate method and roll-pitch-yaw (RPY) method, and the relation between the platform and the driver is ob⁃tained. Compared with the classic 3-RRR wrist joint rehabilitation mechanism, the developed prototype has no advantages such as multi-solution and singular value. The motion performance of the prototype and the electro⁃myographic signals of the two major muscle groups in the forearm are measured. The experimental results show that the maximum roll angle is -90° to 90°, the pitch angle is -90° to 90°, and the virtual yaw angle is -180° to 180°. The maximum electromyogram (EMG) signal can be generated at 950 mV. The results show that the devel⁃oped model can meet the requirements of the wrist motion and train the forearm muscle group.Key words Wrist joint training Parallel mechanism Inverse kinematics Rehabilitation robot0 引言中风是一种很常见的疾病,会使大部分患者有不同程度的大脑受损,最终导致肢体僵硬。
既具有平面操作模式和空间平移操作模式的3自由度并联机器人构型综合专业:交通运输工程学号:M015115102姓名:杨国彬本篇论文分为三个部分:第一部分:确定论文主旨:即通过简化确定多模式并联机器人支链的步骤,来改进多模式并联机器人构型综合的方法。
同时规定一些符号的意思::在机械装置中,轴线平行于平面运动旋转轴的转动副(R jionts ):在一支链中,彼此轴线平行但是不平行于副轴线的R 副:在一支链中,彼此轴线平行;同时,在同样一个腿中,其轴线不与副和副这两者的轴线平行。
:在一支链中,彼此的轴线经过同一个点。
()E :代表一个平面运动链:由具有Bennett 链接的三个连续的转动副组成的Bennett CU (如图1所示)//R \R //R /R //R \R .R ~RRR:代表一个不满足上述提到的一些转动副的情况(即具有平面运动链(()E )的R 副、、、、、这些情况):代表在过渡配置中的R 副,该R 副在平面运动模式下表现为副,或者在空间平移模式和过度配置下表现为副。
:代表一个在过渡配置中的R 副,该R 副在平面运动模式和过度配置下表现为副,或者在空间平移模式下表现为副。
图1 Bennett CU~R //R \R /R .R ~RRR /~⎪⎭⎫ ⎝⎛R ~R /R '//⎪⎭⎫ ⎝⎛R //R \R第二部分:平面并联机器人的构型综合,即研究平面并联运动支链,这里分为三个部分来进行介绍。
2.1、用虚拟链的方法来研究并联机器人的构型综合(在研究平面并联机器人支链时,在底座和动平台之间加有一个E虚拟链,以保证该支链是可以在平面上运动,然后去除E虚拟链,就可以得到平面并联机器人支链)平面虚拟链(E virtual chain 如图2)可以用来代表一个平面运动图2 E virtual chain2.2、用于平面并联运动链(仅由R副组成)的组成单元仅由R副组成的CUs有四种类型,分别是:平面CU(如图3)、球形CU(如图4)、共轴(coaxial)CU和Bennett CU (如图1)。
图3 planar CU 图4 spherical CU2.3、平面并联运动支链的构型综合平面并联机器人支链的获得:首先采用一个或更多的组成单元来构建3自由度单回路运动链,然后去除E 虚拟链来获得平面并联机器人的支链,如下图两个过程:→图5 图6先是由两个平面组成单元4-5和6-7-8-1-2-3组成图5所示的运动链,而后去除E 虚拟链就得到了图6所示的支链。
()E RRR R R R R R \\//////\\//////R R R R R→图7 图8由一个平面5R 组成单元和一个Bennett 组成单元组成图7所示的运动链,而后去除E 虚拟链就得到了图8所示的支链。
()E RRR R RRR R //~////~//R RRR R ~RRR如此就可以得到平面并联运动支链(均列在表1中)第三部分:既具有平面模式又具有空间平移模式的并联机器人构型综合(借助一个过渡配置过程,在两个模式之间转换)该构型综合分为三个步骤:第一步:具有单一模式并联机器人支链的构型综合(已解)第二步:E/PPP=PMs支链的构型综合第三步:E/PPP=PMs支链的组合3.1、表1列出了平面并联机器人支链的情况表2列出了平移并联机器人支链的情况3.2、并联机器人支链的确定之前,在过度配置过程中,比较平面并联机器人支链和平移并联机器人支链两种情况,就可以得到E/PPP=PMs支链改良方法:在过渡配置过程中,通过对平面并联机器人支链施加平移并联机器人支链的条件来获得E/PPP=PMs支链。
平移并联机器人5R支链的条件是:两个或三个连续R副的轴线平行,其他R副的轴线平行。
那么现在就对平面并联机器人5R支链施加平移并联机器人5R支链的条件来获得E/PPP=PMs的支链。
其步骤为:第一步:对于平面并联机器人支链来说,检查它是否满足平移并联机器人支链的条件。
若满足,则该支链就是E/PPP=PMs的支链,直接跳到第五步。
若不满足,执行下一步。
第二步:检查能否通过调整平面机并联器人支链,以致于所有的R副能够分解两个组(在每一组中,R副轴线之间互相平行)。
若不可以,那么该支链就不是E/PPP=PMs的支链,同时直接跳到第五步。
若满足,执行下一步。
第三步:检查能否通过调整这些支链,以致于至少有两个连续的R副是共轴的。
如果可以,那么该支链就不是E/PPP=PMs的支链,同时直接跳到第五步。
若满足,执行下一步。
第四步:检查通过调整这些支链,是否存在一组轴线平行的R副(其中所有这些转动副是连续的)。
若存在,那么这个经过调整的支链就是E/PPP=PMs的支链。
若不存在,那么该支链就不是E/PPP=PMs的支链,执行下一步第五步:重复1-4步骤直到所有平面并联机器人的支链均被考虑到了。
为了简化综合的过程,考虑到在过渡配置过程中,E/PPP=PMs支链的特性是相似的。
平面并联机器人5R支链(详见表1)可以分为以下的子集,以便简化综合的过程:子集1:表1中的Nos6-12支链(由两个平面组成单元组成)子集2:表1中的Nos12-19支链(由一个平面组成单元与一个球形组成单元组成)子集3:表1中的Nos20-29支链(由一个平面组成单元与两个共轴组成单元组成)子集4:表1中的Nos30-32支链(由一个平面组成单元与一个Bennett单元组成)子集1中的每个支链,两个或三个连续的转动副轴线是平行的,同时其他的R 副的轴线也是平行的,这些支链都满足平移并联机器人支链的条件。
因此,平面并联机器人的Nos6-12支链都是E/PPP=PMs 的支链。
子集2中的每个支链,除了副之外的R 副都是连续副。
如果调整副使之平行,那么连续的副既经过同一点又要平行,无异于他们都变成了一个R 副。
因此,平面并联机器人的Nos13-19支链中没有E/PPP=PMs 的支链。
子集3中的每个支链都是由三个副和两个固定的副组成。
对于、、、、这5个支链,即使调整副使之平行了,也因为这5个支链中没有连续的R 副,所以这5个支链中没有E/PPP=PMs 的支链。
//R .R .R .R //R ~R ~R ~//~////R R R R R ////~//~R R R R R ~////~//R R R R R //~////~R R R R R //~//~//R R R R R对于、、、这4个支链,调整副使之平行,得到的支链也是E/PPP=PMs 的支链,但是这个支链和子集1中的Nos6 、7 、8 、9支链是一样的,这里就不在说了。
最后对于支链,调整副使之平行,得到一个经过调整的支链,这个支链是E/PPP=PMs 的支链,记为。
子集4中的每个支链都有一个Bennett 组成单元,我们没法调整这些支链来使这三个具有的副的轴线平行。
因此,这三种类型的支链都不是E/PPP=PMs 的支链。
综上所述,总共有8种E/PPP=PMs 的支链(如表3所示)。
~~//////R R R R R //////~~R R R R R //~~////R R R R R ////~~//R R R R R ~R ~//////~R R R R R ~R ~//////~R R R R R /~'//'//'///~⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛R R R R R ~RRR ~RRR3.3、E/PPP=PMs 支链的组合为了使E/PPP=PM 的自由度是3,支链约束旋量系应该是系(PM 在平面模式下工作)或系(PM 在空间平移模式下工作),每个5R 支链有1个约束旋量,如果一个并联机器人有3个支链,那么就意味着该并联机器人有3个约束旋量,即该PM 有3个自由度。
图9--1--20ζζ∞--3∞ζ图9是E/PPP=PM 的重构过程,首先是在平面模式下运动的,在支链中,三个副的轴线是互相平行的且与约束轴平行;另外两个副的轴线与约束轴相交。
调整两个副使得他们的轴线互相平行,记调整后的支链为,在该支链中,两个副的轴线是互相平行的,这样就可以直接记副为副,副为副,所以就得到在空间平移模式下运动的E/PPP=PM ,即PM 。
通过这个过渡配置过程,这个E/PPP=PM 可以在平面模式和空间平移模式之间转换。
\\///////~'//'//'///~2R R R R R R R R R R --⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛\\//////~//////~2R R R R R R R R R R --~//////~R R R R R //R 101ζ~R 101ζ~R /~'//'//'///~⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛⎪⎭⎫ ⎝⎛R R R R R /~⎪⎭⎫ ⎝⎛R /~⎪⎭⎫ ⎝⎛R \R '//⎪⎭⎫ ⎝⎛R /R \\//////\///\-2-R R R R R R R R R R结论分析了从一种运动模式切换到另一种运动模式的并联机器人,为了达到这个目的,改良了分析并联机器人支链的方法。
此外,也第一次研究了包含Bennett组成单元的平面并联机器人。
这项工作进一步发展了用于并联机器人机构分析的虚拟链方法,奠定了研究其他类型并联机器人机构综合(包括实现至少一种平面操作模式的并联机器人)的基础。