计算机网络控制技术实验报告
华北电力大学 实验报告 | | 实验名称:机器人控制技术基础 课程名称:机器人控制技术基础 实验人:张钰信安1601 201609040126 李童能化1601 201605040111 韩翔宇能化1601 201605040104 成绩: 指导教师:林永君、房静 实验日期: 2016年3月4日-3月26日 华北电力大学工程训练中心
第一部分:单片机开发板 实验一:流水灯实验 实验目的:通过此实验,初步掌握单片机的 IO 口的基本操作。 实验内容:控制接在 P0.0上的 8个LED L0—L8 依次点亮,如此循环。 硬件说明: 根据流水灯的硬件连接,我们发现只有单片机的IO口输出为低电平时LED灯才会被点亮,我们先给P0口设定好初值,只让其点亮一盏灯,然后用左右移函数即可依次点亮其他的灯。 源程序如下: #include
led_1=1; led_2=0; display_ms(10); led_2=1; led_3=0; display_ms(10); led_3=1; led_4=0; display_ms(10); led_4=1; led_5=0; display_ms(10); led_5=1; led_6=0; display_ms(10); led_6=1; led_7=0; display_ms(10); led_7=1; led_8=0; display_ms(10); led_8=1; } } 第二部分:机器人小车 内容简介:机器人小车完成如图规定的赛道,从规定的起点开始,记录完成赛道一圈的时间。必须在30秒之内完成,超时无效。其中当小车整体都在赛道外时停止比赛,视为犯规,小车不规定运动方向,顺时针和逆时针都可以采用,但都从规定的起点开始记录时间。 作品优点及应用前景: 单片机可靠性高,编程简单单片机执行一条指令的时间是μs级,执行一个扫描周期的时间为几ms乃至几十ms。相对于电器的动作时间而言,扫描周期是
武汉大学教学实验报告 动力与机械学院能源动力系统及自动化专业2013 年11 月10 日
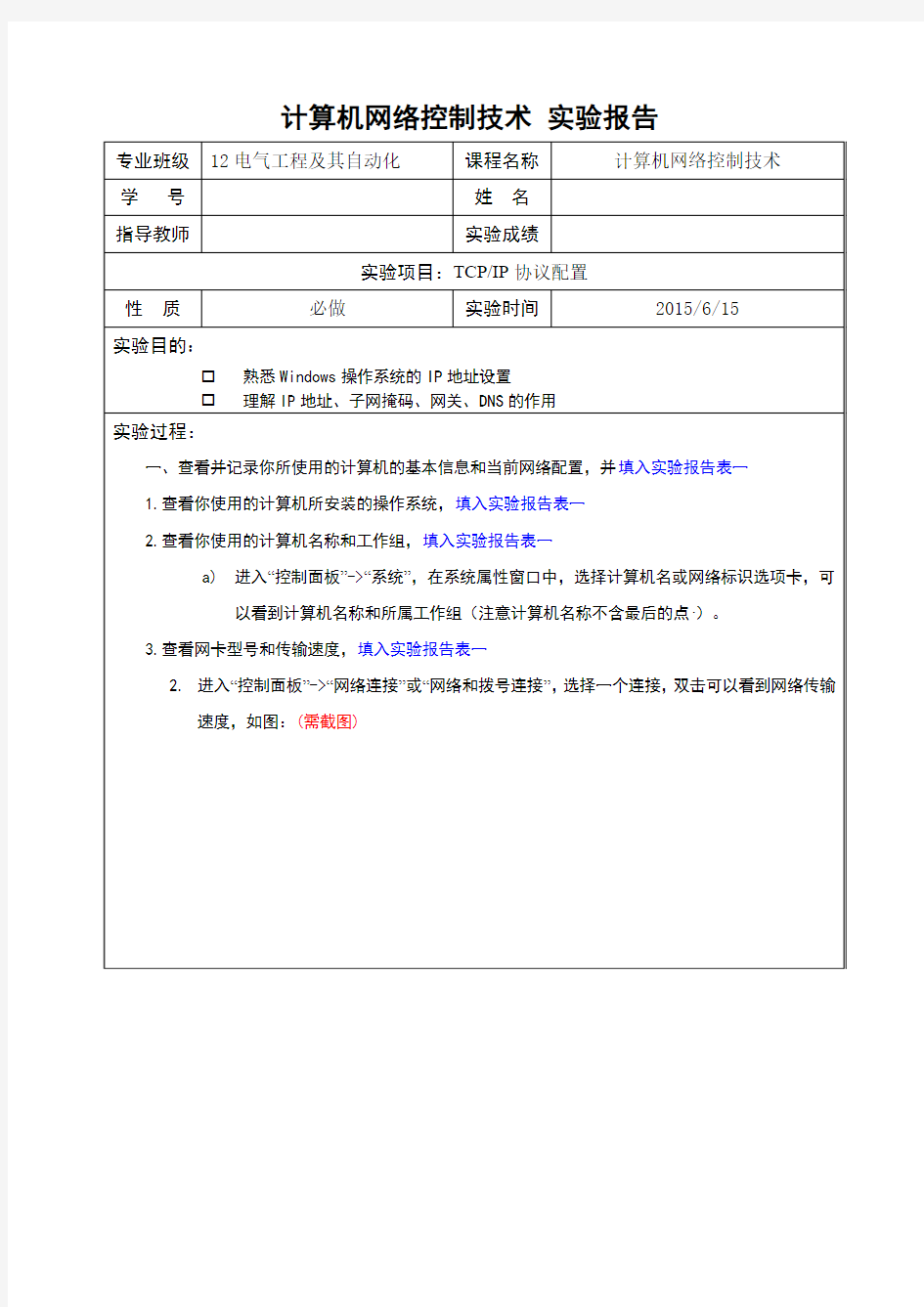
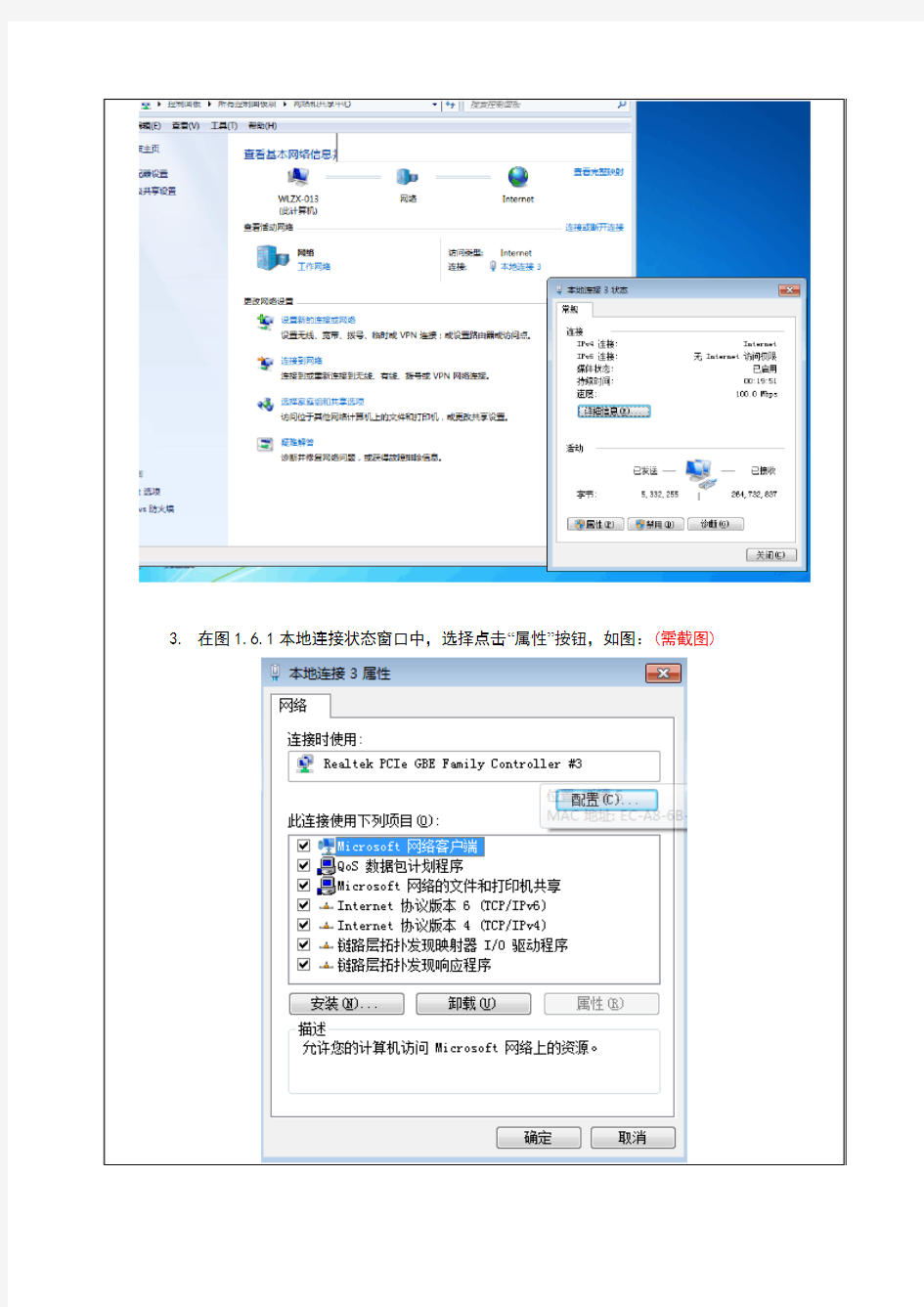
一、实验操作过程 1.在仿真软件packet tracer上按照实验的要求选择无线路由器,一般路由器和PC机构建一个无线局域网,局域网的网络拓扑图如下: 2.按照实验指导书上的表9.1(参数配置表)对路由器,DNS服务器,WWW服务器和PC机进行相关参数的配置: 服务器配置信息(子网掩码均为255.255.255.0) 主机名IP地址默认网关 DNS 202.2.2.1 202.2.2.2 WWW 202.3.3.1 202.3.3.3 路由器配置信息(子网掩码均为255.255.255.0) 主机名型号IP地址默认网关时钟频率ISP 2620XM e1/0:202.2.2.2 e1/1:202.3.3.3 s0/0:202.1.1.2 64000 Router2(Server) 2620XM f0/0:192.168.1.1 s0/0:202.1.1.1 Wireless Router Linksys WRT300N 192.168.1.2 192.168.1.1 202.2.2.1 备注:PC机的IP地址将通过无线路由器的设置自动分配 2.1 对router0(sever)断的配置: 将下列程序代码输到router0中的IOS命令行中并执行,对router0路由器进行设置。Router>en Router#conf t
2.3 WWW服务器的相关配置 对www服务器进行与DNS服务器相似的配置,包括它的IP地址,子网掩码,网关等,具体的相关配置图见下图: WWW服务器的相关配置图
计算机网络实验报告 班级:电信0901 学号:U200914332 姓名:王焕 2012.1
实验四:网络协议与Web通信 一、实验目的 1.了解网络协议数据单元的格式 2.分析网络协议工作基本流程 3.深入理解Web应用的通信过程 二、实验内容 1.网络协议数据单元分析 通过wireshark抓取局域网数据包并分析各个层次的协议数据单元内容 (1)以太网帧头 (2)IP分组首部 (3)ARP包 (4)ICMP包(ping) 2.Web原理实验 (1)HTTP协议分析 (2)通过socket编程模拟HTTP协议通信过程 三、实验原理 1.Web通信经过四个步骤: (1)建立连接 (2)客户端发送HTTP REQUEST请求 (3)服务器端接收请求,生成RESPONSE响应 (4)关闭连接 2.HTTP协议 客户端浏览器或其他程序与Web服务器之间的应用层通信协议。一般在Internet 上的Web服务器上存放的都是超文本信息,客户机需要通过HTTP协议传输所要访问的超文本信息。 3.Java网络编程 Java Socket对网络的封装是非常完美的,对于进行网络编程的程序员,使用网络就像使用本地文件系统一样简单。 与其他Socket网络编程有一个明显的区别就是,在服务器和客户机通信建立时就要另外一个ServerSocket 。 它仅仅适用与服务器端,监听指定端口,如果有socket 连接请求,它就答应,并在服务器端产生一个socket 与其对应,那么用这个socket 就可以和客户端进行通信了。 实验原理图如下:
四、实验内容及分析 1.编译、执行参考程序 本次实验提供了两个原始程序(NetServer.java和NetClient.java),它们可以实现一个服务器/客户端请求响应的完整过程。Dos环境下先后编译执行NetServer.java与NetClient.java,即可得到一次完整的客户端向服务器请求并得到响应的完整过程,结果如下: 2.修改、编写实验程序 参考程序模拟了客户端与服务器之间的对话,但由于其之间交互的数据都是我们设定的而不含有http报头信息,因此不能和真正的web服务器与浏览器对话,以下即为
电子科技大学学院实验报告 实验名称现代电子技术综合实验 姓名: 学号: 评分: 教师签字 电子科技大学教务处制
电子科技大学 实验报告 学生姓名:学号:指导教师:熊万安 实验地点:211大楼308 实验时间: 一、实验室名称:单片机技术综合实验室 二、实验项目名称:数码管显示A/D转换电压值及秒表 三、实验学时:12 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉实验板的应用 4、连接电路,编程调试,实现各部分的功能 5、完成系统软件的编写与调试 五、实验器材 1、PC机一台 2、实验板一块 六、实验原理、步骤及内容 试验要求: ①、数码管可在第2位到第4位显示A/D转换的电压值, 可调电压,数码管第5位显示“-”号,第6、7位显示2位学 号;
②、再按按键key1进行切换,此时数码管第6、7位显示从 学号到(学号值+5秒)的循环计时秒表,时间间隔为1秒。 按按键key2时,秒表停止计数,再按按键key2时,秒表继续 计数。按按键key1可切换回任务1的显示。 ③、当电压值大于2伏时,按按键不起作用。 1、硬件设计 2、各部分硬件原理 (相关各部分例如:数码管动态扫描原理;TLC549ADC特征及应用等) (1)数码管动态扫描原理 多位联体的动态数码管段选信号abcdefg和dp(相当于数据线是公用的,而位选信号com是分开的。扫描方法并不难,先把第1个数码管的显示数据送到abcdefg和dp,同时选通com1,而其它数码管的com信号禁止;延时一段时间(通常不超过10ms),再把第二个
数码管的显示数据送到abcdefg和dp,同时选通com2,而其他数码管的com信号禁止;延时一段时间,再显示下一个。注意,扫描整个数码管的频率应当保证在50Hz 以上,否则会看到明显的闪烁。 (2)TLC549ADC特征及应用等 当/CS变为低电平后,TLC549芯片被选中,同时前次转换结果的最高有效位MSB (A7)自DAT端输出,接着要求自CLK端输入8个外部时钟信号,前7个CLK信号的作用,是配合TLC549 输出前次转换结果的A6-A0 位,并为本次转换做准备:在第4个CLK 信号由高至低的跳变之后,片内采样/保持电路对输入模拟量采样开始,第8个CLK 信号的下降沿使片内采样/保持电路进入保持状态并启动A/D开始转换。转换时间为36 个系统时钟周期,最大为17us。直到A/D转换完成前的这段时间内,TLC549 的控制逻辑要求:或者/CS保持高电平,或者CLK 时钟端保持36个系统时钟周期的低电平。由此可见,在自TLC549的CLK 端输入8个外部时钟信号期间需要完成以下工作:读入前次A/D转换结果;对本次转换的输入模
北京科技大学 智能控制理论基础实验报告 学院 专业班级 姓名 学号 指导教师 成绩 2014 年4月17日
实验一采用SIMULINK的系统仿真 一、实验目的及要求: 1.熟悉SIMULINK 工作环境及特点 2.掌握线性系统仿真常用基本模块的用法 3.掌握SIMULINK 的建模与仿真方法 二、实验内容: 1.了解SIMULINK模块库中各子模块基本功能 微分 积分 积分步长延时 状态空间模型 传递函数模型 传输延迟 可变传输延迟 零极点模型
直接查询表 函数功能块MATLAB函数 S函数(系统函数) 绝对值 点乘 增益 逻辑运算 符号函数 相加点 死区特性 手动开关 继电器特性 饱和特性 开关模块 信号分离模块 信号复合模块 输出端口 示波器模块 输出仿真数据到文件
通过实验熟悉以上模块的使用。 2. SIMULINK 的建模与仿真方法 (1)打开模块库,找出相应的模块。鼠标左键点击相应模块,拖拽到模型窗口中即可。 (2)创建子系统:当模型大而复杂时,可创建子系统。 (3)模块的封装: (4)设置仿真控制参数。 3.SIMULINK仿真实际应用 PID控制器的仿真实现。 控制对象的开环传递函数如下图: 加入PID控制器,求系统单位负反馈闭环单位阶跃响应,要求通过调节器的作用使系统满足超调量20%,上升时间3s,调节时间10s的要求。使输出曲线如下图。要求加入的PID控制器封装成一个模块使用。 三、实验报告要求: 1.针对具体实例写出上机的结果,体会其使用方法,并作出总结。
控制对象的开环传递函数如下图: 加入PID控制器,求系统单位负反馈闭环单位阶跃响应,要求通过调节器的作用使系统满足超调量20%,上升时间3s,调节时间10s的要求。使输出曲线如下图。要求加入的PID控制器封装成一个模块使用。PID如下: 图1-PID控制器仿真 设计的PID控制器参数为,P-0.3,I-0.5,D-0.4,尽可能的达到超调量20%,上升时间3s,调节时间10s的要求,仿真曲线图如下: 图2-PID控制器仿真曲线图 才实验开始的初期,我觉得这个实验过于简单,但是上手之后,我发现它是
《智能控制技术》实验报告书 学院: 专业: 学号: 姓名:
实验一:模糊控制与传统PID控制的性能比较 一、实验目的 通过本实验的学习,使学生了解传统PID控制、模糊控制等基本知识,掌握传统PID控制器设计、模糊控制器设计等知识,训练学生设计控制器的能力,培养他们利用MATLAB进行仿真的技能,为今后继续模糊控制理论研究以及控制仿真等学习奠定基础。 二、实验内容 本实验主要是设计一个典型环节的传统PID控制器以及模糊控制器,并对他们的控制性能进行比较。主要涉及自控原理、计算机仿真、智能控制、模糊控制等知识。 通常的工业过程可以等效成二阶系统加上一些典型的非线性环节,如死区、饱和、纯延迟等。这里,我们假设系统为:H(s)=20e0.02s/(1.6s2+4.4s+1) 控制执行机构具有0.07的死区和0.7的饱和区,取样时间间隔T=0.01。 设计系统的模糊控制,并与传统的PID控制的性能进行比较。 三、实验原理、方法和手段 1.实验原理: 1)对典型二阶环节,根据传统PID控制,设计PID控制器,选择合适的PID 控制器参数k p、k i、k d; 2)根据模糊控制规则,编写模糊控制器。 2.实验方法和手段: 1)在PID控制仿真中,经过仔细选择,我们取k p=5,k i=0.1,k d=0.001; 2)在模糊控制仿真中,我们取k e=60,k i=0.01,k d=2.5,k u=0.8; 3)模糊控制器的输出为:u= k u×fuzzy(k e×e, k d×e’)-k i×∫edt 其中积分项用于消除控制系统的稳态误差。 4)模糊控制规则如表1-1所示: 在MATLAB程序中,Nd用于表示系统的纯延迟(Nd=t d/T),umin用于表示控制的死区电平,umax用于表示饱和电平。当Nd=0时,表示系统不存在纯延迟。 5)根据上述给定内容,编写PID控制器、模糊控制器的MATLAB仿真程序,
计算机网络实验报告 专业计算机科学与技术 班级计102 学号 109074057 姓名王徽军 组号一组D 指导教师毛绪纹 安徽工业大学计算机学院 二○一二年十二月
目录 实验总体说明 (3) 实验一以太网帧的构成 (3) 实验三路由信息协议RIP (9) 实验四传输控制协议TCP (11) 实验五邮件协议SMTP、POP3、IMAP (12) 实验六超文本传输协议HTTP (14)
实验总体说明 1.实验总体目标 配合计算机网络课程的教学,加强学生对计算机网络知识(TCP/IP协议)的深刻理解,培养学生的实际操作能力。 2.实验环境 计算机网络协议仿真实验室: 实验环境:网络协议仿真教学系统(通用版)一套 硬件设备:服务器,中心控制设备,组控设备,PC机若干台 操作系统:Windows 2003服务器版 3.实验总体要求 ●按照各项实验内容做实验,记录各种数据包信息,包括操作、观察、记录、分析, 通过操作和观察获得直观印象,从获得的数据中分析网络协议的工作原理; ●每项实验均提交实验报告,实验报告的内容可参照实验的具体要求,但总体上应包 括以下内容:实验准备情况,实验记录,实验结果分析,算法描述,程序段,实验过程中遇到的问题以及对思考问题的解答等,实验目的、实验原理、实验步骤不需要写入实验报告中。 实验一以太网帧的构成 实验时间:_____________ 成绩:________________ 实验角色:_____________ 同组者姓名:______________________________
练习一:领略真实的MAC帧 00000000: FF FF FF FF FF FF 8C 89 A5 75 71 10 06 05 14 55 ..q....U 00000010: 85 48 D2 78 62 13 47 24 58 25 00 00 00 00 00 00 .H襵b.G$X%...... 00000020: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 ................ 00000030: 00 00 00 00 00 00 00 00 00 00 00 00 ............ 练习二:理解MAC地址的作用 ●记录实验结果 表1-3实验结果 本机MAC地址源MAC地址目的MAC地址是否收到,为什么 主机B 8C89A5-7570BB 8C89A5-757113 8C89A5-7570C1 是,主机A与主机B接在同一共享模块 主机D 8C89A5-771A47 8C89A5-757113 8C89A5-7570C1 是,主机C与主机D接在同一共享模块 主机E 8C89A5-757110 无无否,与主机A、C都不在同一共享模块 主机 F 8C89A5-7715F8 无无否,与主机A、C都不在同一共享模块 练习三:编辑并发送MAC广播帧 ●结合练习三的实验结果,简述FFFFFF-FFFFFF作为目的MAC地址的作用。 答:该地址为广播地址,作用是完成一对多的通信方式,即一个数据帧可发送给同一网段内的所有节点。 练习四:编辑并发送LLC帧 ●实验结果 帧类型发送序号N(S)接受序号N(R) LLC 001F 0 ●简述“类型和长度”字段的两种含义 答:一是如果字段的值小于1518,它就是长度字段,用于定义下面数据字段的长度;二是如果字段的值大于1536,用于定义一个封装在帧中的PDU分组的类型。 思考问题: 1.为什么IEEE802标准将数据链路层分割为MAC子层和LLC子层? 答:出于厂商们在商业上的激烈竞争,IEEE的802委员会未能形成一个统一的、最佳的局域网标准,而是被迫制定了几个不同标准,如802.4令牌总线网、802.5令牌环网等。为了使数据链路层能更好地适应多种局域网标准,802委员会就将局域网的数据链路层拆成两个子层,即逻辑链路控制
电子科技大学通信与信息工程学院实验报告 实验名称现代电子技术综合实验 姓名: 学号: 评分: 教师签字 电子科技大学教务处制
电子科技大学 实验报告 学生姓名:学号:指导教师:熊万安 实验地点:科A333 实验时间:2016.3.7-2016.3.17 一、实验室名称:电子技术综合实验室 二、实验项目名称:电子技术综合实验 三、实验学时:32 四、实验目的与任务: 1、熟悉系统设计与实现原理 2、掌握KEIL C51的基本使用方法 3、熟悉SMART SOPC实验箱的应用 4、连接电路,编程调试,实现各部分的功能 5、完成系统软件的编写与调试 五、实验器材 1、PC机一台 2、SMART SOPC实验箱一套 六、实验原理、步骤及内容 试验要求: 1. 数码管第1、2位显示“1-”,第3、4位显示秒表程序:从8.0秒到1.0秒不断循环倒计时变化;同时,每秒钟,蜂鸣器对应发出0.3秒的声音加0.7秒的暂停,对应第8秒到第1秒,声音分别为“多(高
音1)西(7)拉(6)索(5)发(4)米(3)莱(2)朵(中音1)”;数码管第5位显示“-”号,数码管第6、7、8位显示温度值,其中第6、7位显示温度的两位整数,第8位显示1位小数。按按键转到任务2。 2. 停止声音和温度。数码管第1、2位显示“2-”,第3、4位显示学号的最后2位,第5位显示“-”号,第6到第8位显示ADC电压三位数值,按按鍵Key后转到任务3,同时蜂鸣器发出中音2的声音0.3秒; 3. 数码管第1、2位显示“3-”,第3、4位显示秒表程序:从8.0秒到1.0秒不断循环倒计时变化;调节电压值,当其从0变为最大的过程中,8个发光二极管也从最暗(或熄灭)变为最亮,当电压值为最大时,秒表暂停;当电压值为最小时,秒表回到初始值8.0;当电压值是其他值时,数码管又回到第3、4位显示从8.0秒到1.0秒的循环倒计时秒表状态。按按鍵Key回到任务1,同时蜂鸣器发出中音5的声音0.3秒。
福建农林大学计算机与信息学院 实验报告 2015年10 月27 日
实验项目列表
实验报告 系:计算机科学专业:计算机科学与技术年级: 姓名:学号:实验室号:计算机号: 实验日期:2015 年10 月27 日指导教师签字:成绩: 报告退发(订正、重做) 实验二网络监听实验 一、实验目的 1、理解网络监听原理 2、熟悉网络监听方法 3、理解网络流量 4、掌握TCP/IP的主要协议和协议的层次结构 二、实验环境与设备 本实验在实际因特网环境下进行操作,需要的设备有:一台PC机,WireShark监听软件。WireShark监听软件可从网址:https://www.doczj.com/doc/b213853973.html,/下载。实验配置如图所示。 因特网 三、实验原理 1、网络协议分析器 如果使用Web浏览器或OICQ聊天这样的网络软件,必须有网络连接才能工作,然而,你知道它们在因特网上传送的是什么类型的信息吗? 例如,计算机要对远程Web服务器发送什么数据来获取它需要的网页呢?计算机如何将邮件发给指定的人呢? 可以通过网络协议分析器(如WireShark)来协助观察网络会话的细节。网络协议分析器是一个能记录所有网络分组,并以人们可读的形式显示的软件。在监听重流量网络时,允许用户过滤掉不想要的分组或查看感兴趣的特定分组,而且还能为用户提供所有分组的统计概要。 2、网络监听原理 在共享式局域网中,位于同一网段的每台主机都可以截获在网络中传输的所有数据,正常情况下,一个网卡只响应目的地址为单播地址和广播地址的MAC帧而忽略其它MAC帧,网卡接收这两种帧时,通过CPU产生一个硬件中断,然后由操作系统负责处理该中断,对数据
计算机专业类课程 实 验 报 告 课程名称:计算机网络 学院:计算机科学与工程 专业:计算机科学与技术 学生:ZYZ 学号:26 指导教师:FB 日期:2016年06月10日
目录 实验一 (3) 实验二 (7) 实验三 (12) 实验四 (17) 实验五 (21)
电子科技大学 实验报告 实验一 一、实验名称:交换机和路由器的基本配置 二、实验学时:4 三、实验容和目的: 理解和掌握交换机和路由器的工作原理;掌握交换机和路由器命令行各种操作模式的区别;能够使用各种帮助信息,以及用命令进行基本的配置。 假设是某公司新进的网管,公司要求你熟悉网络产品。 首先要求你登录交换机或路由器,了解并掌握交换机和路由器的命令行操作,以及如何使用一些基本命令对设备进行配置,包括交换机和路由器的设备名、登录时的描述信息、端口参数的基本配置,以及设备运行状态的查看。 四、实验原理: 交换机和路由器的管理方式基本分为两种:带管理和带外管理。 交换机或路由器的命令行操作模式,主要包括:用户模式、特权模式、全局配置模式、端口模式等几种。 交换机或路由器的基本操作命令包括Exit、End、Show version、Show mac-address-table、Show ip route、Show running-config。 以创建两种类型的标题:每日通知和登录标题。 五、实验器材(设备、元器件) 三层交换机1台、路由器1台、计算机1台。 六、实验步骤:
交换机的配置 第一步:交换机各个操作模式直接的切换 Swtich>enable Swtich#configure terminal !使用enable命令从用户模式进入特权模式,再从特权模式进入全局配置模式第二步:交换机命令行界面基本功能 第三步:配置交换机的名称和每日提示信息 第四步:配置接口状态 第五步:查看交换机的系统和配置信息 第六步:保存配置 路由器的配置 第一步:路由器各个操作模式直接的切换 第二步:路由器命令行界面基本功能 第三步:配置路由器的名称和每日提示信息 第四步:配置接口状态 第五步:配置路由器的接口并查看接口配置 第六步:显示路由表的信息 七、实验数据及结果分析: (1)交换机的配置文件容,即show running-config 的结果
基于FPGA的现代电子实验设计报告 ——数字式秒表设计(VHDL)学院:物理电子学院 专业: 学号: 学生姓名: 指导教师:刘曦 实验地点:科研楼303 实验时间:
摘要: 通过使用VHDL语言开发FPGA的一般流程,重点介绍了秒表的基本原理和相应的设计方案,最终采用了一种基于FPGA 的数字频率的实现方法。该设计采用硬件描述语言VHDL,在软件开发平台ISE上完成。该设计的秒表能准确地完成启动,停止,分段,复位功能。使用ModelSim 仿真软件对VHDL 程序做了仿真,并完成了综合布局布线,最终下载到EEC-FPGA实验板上取得良好测试效果。 关键词:FPGA,VHDL,ISE,ModelSim
目录 绪论 (4) 第一章实验任务 (5) 第二章系统需求和解决方案计划 (5) 第三章设计思路 (6) 第四章系统组成和解决方案 (6) 第五章各分模块原理 (8) 第六章仿真结果与分析 (11) 第七章分配引脚和下载实现 (13) 第八章实验结论 (14)
绪论: 1.1课程介绍: 《现代电子技术综合实验》课程通过引入模拟电子技术和数字逻辑设计的综合应用、基于MCU/FPGA/EDA技术的系统设计等综合型设计型实验,对学生进行电子系统综合设计与实践能力的训练与培养。 通过《现代电子技术综合实验》课程的学习,使学生对系统设计原理、主要性能参数的选择原则、单元电路和系统电路设计方法及仿真技术、测试方案拟定及调测技术有所了解;使学生初步掌握电子技术中应用开发的一般流程,初步建立起有关系统设计的基本概念,掌握其基本设计方法,为将来从事电子技术应用和研究工作打下基础。 本文介绍了基于FPGA的数字式秒表的设计方法,设计采用硬件描述语言VHDL ,在软件开发平台ISE上完成,可以在较高速时钟频率(48MHz)下正常工作。该数字频率计采用测频的方法,能准确的测量频率在10Hz到100MHz之间的信号。使用ModelSim仿真软件对VHDL程序做了仿真,并完成了综合布局布线,最终下载到芯片Spartan3A上取得良好测试效果。 1.2VHDL语言简介:
《智能控制导论》上机实验报告 专业班级:自动化121 姓名:蒋德鹏 学号:201210401117 指导教师:詹跃东 昆明理工大学信息工程与自动化学院自动化系 2015年5月
洗衣机的模糊控制系统仿真 一、实验软件 Matlabb/Simulink 编程语言. 二、实验目的 1. 熟悉智能控制系统中的建模与控制过程; 2. 熟悉专家控制、模糊控制和神经网络的建模和控制算法的应用; 3. 熟悉专家控制、模糊控制和神经网络的编程语言的应用。 三、需要的预备知识 1. 熟悉Matlabb/Simulink 编程语言; 2. 熟悉专家控制、模糊控制和神经网络建模与控制方法; 3. 熟悉Matlabb/Simulink 的应用; 4. 熟悉Matlabb/Simulink 常用人机接口设计。 四、实验数据及步骤 1. 实验内容 洗衣机的模糊控制系统仿真; 2. 实验原理 模糊控制的基本原理和基本流程; 基本原理:模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它从行为上模仿人的模糊推理和决策过程。该方法首先将操作人员或专家经验编程模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。图为模糊控制原理框图。 图一 模糊控制原理框图 给定值 模糊化 模糊推理 规则库 逆模糊 传感器 执行机构 被控对象 精确量 模糊控制器
基本流程: 2. 实验步骤 (1)确定洗衣机模糊控制的结构 如图二所示为洗衣机模糊控制推理框图。 图二 洗衣机模糊控制推理框图 开始 确定模糊控制器的结构 定义输入、输出模糊集 定义隶属函数 污泥X 油脂 Y 洗涤时间Z 洗衣机模糊控 制器 建立模糊控制规则 模糊推理 Matlab 仿真 结束
重庆交通大学 学生实验报告 实验课程名称《计算机网络技术》课程实验 开课实验室软件与通信实验中心 学院国际学院年级2012 专业班(1)班 学生姓名吴双彪学号6312260030115 开课时间2014 至2015 学年第二学期 实验2简单的局域网配置与资源共享 实验目的: 1、掌握将两台PC联网的技能与方法 2、掌握将几台PC连接成LAN的技能与方法 3、掌握局域网内资源共享的技能与方法 实验内容和要求: 1、选用百兆交换机连接PC若干台; 2、在上述两种情况下分别为PC配置TCP/IP协议,使他们实现互联和资源共享实验环境:(画出实验网络拓图) 实验步骤: 1、选择两台计算机; 选PC0与PC1. 2、设置两台计算机IP地址为C类内部地址; 两台PC机的IP分别设置为:、202.202.242.47、202.202.243.48; 两台PC机的掩码分别设置为:、255.255.255.0、255.255.255.0; 3、用一台计算机Ping另一台计算机,是否能Ping通?
4、我的电脑→工具→文件夹选项→查看→去掉“使用简单文件共享(推荐)”前 的勾;设置共享文件夹。 5、控制面板→管理工具→本地安全策略→本地策略→安全选项里,把“网络访 问:本地帐户的共享和安全模式”设为“仅来宾-本地用户以来宾的身份验证” (可选,此项设置可去除访问时要求输入密码的对话框,也可视情况设为“经典-本地用户以自己的身份验证”); 6、通过网络邻居或在运行窗口输入“\\对方IP地址”实现资源共享。 1)指定IP地址,连通网络 A.设置IP地址 在保留专用IP地址范围中(192.168.X.X),任选IP地址指定给主机。 注意:同一实验分组的主机IP地址的网络ID应相同 ..。 ..,主机ID应不同 ..,子网掩码需相同B.测试网络连通性 (1)用PING 命令PING 127.0.0.0 –t,检测本机网卡连通性。 解决方法:检查网线是否连接好,或者网卡是否完好 (2)分别“ping”同一实验组的计算机名;“ping”同一实验组的计算机IP地址,并记录结 果。答:能。结果同步骤3 (3)接在同一交换机上的不同实验分组的计算机,从“网上邻居”中能看到吗?能ping通 吗?记录结果。 2) 自动获取IP地址,连通网络 Windows主机能从微软专用B类保留地址(网络ID为169.254)中自动获取IP地址。 A.设置IP地址 把指定IP地址改为“自动获取IP地址”。 B.在DOS命令提示符下键入“ipconfig”,查看本机自动获取的IP地址,并记录结果。 C.测试网络的连通性 1.在“网上邻居”中察看能找到哪些主机,并记录结果。 2.在命令提示符下试试能“ping”通哪些主机,并记录结果。 答:能ping通的主机有KOREYOSHI ,WSB ,ST ,LBO ,CL 。思考并回答 测试两台PC机连通性时有哪些方法? 实验小结:(要求写出实验中的体会)
计算机网络实验报告 姓名 学号 专业 班级 指导教师毛绪纹 2017.12
实验2-1 PPP 与 PPPoE 学习 实验配置说明 该实验主要用于观察PPPoE和PPP的数据封装格式。其中,PC1到ISP1段的链路使用PPPoE,ISP1已经配置为PPPoE服务器。ISP1和ISP2之间的链路使用PPP。 实验目的 了解PPP协议的封装格式。 了解PPPoE协议的封装格式。 实验步骤 任务:观察PPP协议和PPPoE协议的数据封装格式 步骤1:准备工作 单击主窗口右下角 Realtime 和 Simulation 模式切换按钮数次,直至交换机指示灯呈绿色 步骤2:建立PPPoE连接 单击拓扑图中的 PC1,在弹出窗口中单击 Desktop 选项卡,选择桌面上的 Command 工具,在其中输入 ipconfig 命令查看 PC1 的 IP 地址信息, PC1 在初始状态下并未配 置 IP 地址。选择 PPPoE 拨号工具,在弹出窗口中输入拨号信息,即用户名(User Name)和密码(Password):ISP1 预设了两个用户名,分别为 user 和 admin,密码与用户名相同。输入拨号信息后单击 Connect 按钮,建立 PPPoE 连接。关闭 PPPoE 拨号窗口,重新打开 Command 工具,输入 ipconfig 命令查看 PC1 是否获取到 IP 地址。如已获取到 ISP1 预设的地址池范围内的 IP 地址,则表示 PPPoE 拨号成功。
步骤3:添加并捕获数据包 进入 Simulation(模拟)模式。设置 Event List Filters(事件列表过滤器)只显示 ICMP 事件。单击 Add Simple PDU(添加简单PDU)按钮,在拓扑图中添加PC1 向PC2 发送的数据包。单击 Auto Capture/Play(自动捕获/播放)按钮捕获数据。此时PC1 上出现信封图标,并在信封图标上闪烁“√”图标。此时可再次单击 Auto Capture/Play (自动捕获/播放)按钮停止捕获数据包。 步骤4:观察PPPoE协议封装格式 选择事件列表中PC1 到Switch0 或者 Switch0 到 ISP1 的数据包,即事件列表中的第二或第三个数据包。单击其 Info 项上的色块,在弹出的 PDU 信息窗口中选择Inbound PDU Details 选项卡。 步骤5:观察PPP协议的封装格式
电子技术实验报告 一、元器件认识 (一)、电阻 电阻元件的的标称阻值,一般按规定的系列值制造。电阻元件的误差有六级,对应的标称值系列有E192、E96、E12和E6。电阻在电路中的主要作用为分流、限流、分压、偏置等。 电阻器的标称值和误差等级一般都用数字标印在电阻器的保护漆上。但体积很小的和一些合成的电阻器其标称值和误差等级常以色环的方便之处,能清楚地看清阻值,便于装配和维修。 电阻色码图 颜色黑棕红橙黄绿蓝紫灰白金银本色对应0 1 2 3 4 5 6 7 8 9 / / / 数值 4 567890123对应/ / / 10 10 10 10 10 10 10 10 10 10 n10 方 次 表示/ +1% +2% / / +0.5% +0.25% +0.1% / / +5% +10& +20% 误差-1% -2% -0.5% -0.25% -0.1% -5% -10% -20% 值 色环表示方法有两种形式,一种是四道环表示法,另外一种是五道环表示法。 四道色环:第1,2色环表示阻值的第一、第二位有效数字,第3色环表示两位n数字再乘以10 的方次,第4色环表示阻值的误差。五道色环:第1,2,3色环
n表示阻值的3位数字,第4色环表示3位数字再乘以10的方次,第5色环表示阻值的误差。 ,二,电容值识别 电容在电路中一般用“C”加数字表示(如C13表示编号为13的电容).电容是由两片金属膜紧靠,中间用绝缘材料隔开而组成的元件.电容的特性主要是隔直流通交流. 电容容量的单位为皮法(pf)或(uf),大多数电容的容量值都印其外封装上,主要有两种识别方法,一种是直接识别方法,例如220UF就是220uF,4n7就是 4.7nF;另一种是指数标识,一般以数值乘以倍率表示,倍率值一般用最后 3一位数字表示,单位为pf。比如103,表示容量为10*10pf,即0.01uf;而224表示容量为22*10000pf,即0.22uf;331,表示容量为33*10pf,即330pf。误差用字母表示。“k”表示误差额为10%,“j”表示误差额为5%。而字母“R”可用于表示小数点,例如3R3=3.3 1 (三)用万用表测试半导体二极管 将一个PN结加上正负电极引线,再用外壳封装就构成半导体二极管。由P区引出的电极为正(或称阳极),由N区引出的电极为负极(或称阴极)。 (1) 鉴别二极管的正,负极电极 用万用表表测量二极管的极性电路图,黑表棒接内部电池正极,红表棒接内部电池负极。测量二极管正向极性时按“A”连接,万用表的欧姆档量程选在R*10档。若读数在几百到几百千欧以下,表明黑表棒所接的一段为二极管的正极,二极管正向导通,电阻值较小;若读数很大,则红表棒所接的一端是二极管的正极,此时二极管反向截止。二极管的基本特性是单向导电性。 (四)用万用表测试小功率晶体三极管
智能控制实验报告 姓名 学院 专业自动化班级 学号 指导教师 成绩 2019 年 12 月 25 日 实验一 模糊控制在角度随动系统中的应用一、实验目的与意义学习 Matlab 中建立模糊控制器的方法;了解模糊控制在角度随动系统中的 应用。 二、实验内容在 Matlab 中建立模糊控制器,将生成的模糊规则表插入程序代码中,交叉 编译代码,下载到目标版中进行测试。 1 、Matlab 文本模式建立模糊控制器(必做) 2 、利用 Matlab 模糊逻辑工具箱建立模糊控制器(选做) 3 、模糊控制器 Simulink 仿真(必做) 4 、嵌入式程序交叉编译(选做) 三、实验结果 1 、matlab 文本模式建立模糊控制器 %Fuzzy Controller Design clear all; close all; %新建 FIS a=newfis("myfuzzy"); %输入e,范围[-48,48],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB
a=addvar(a,"input","e",[-48 48]); %Parameter e a=addmf(a,"input",1,"NB","trimf",[-48 -36 -24]); a=addmf(a,"input",1,"NM","trimf",[-36 -24 -12]); a=addmf(a,"input",1,"NS","trimf",[-24 -12 0]); a=addmf(a,"input",1,"Z","trimf",[-12 0 12]); a=addmf(a,"input",1,"PS","trimf",[0 12 24]); a=addmf(a,"input",1,"PM","trimf",[12 24 36]); a=addmf(a,"input",1,"PB","trimf",[24 36 48]); %输入ec,范围[-64,64],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB a=addvar(a,"input","ec",[-64 64]); %Parameter ec a=addmf(a,"input",2,"NB","trimf",[-64 -48 -32]); a=addmf(a,"input",2,"NM","trimf",[-48 -32 -16]); a=addmf(a,"input",2,"NS","trimf",[-32 -16 0]); a=addmf(a,"input",2,"Z","trimf",[-16 0 16]); a=addmf(a,"input",2,"PS","trimf",[0 16 32]); a=addmf(a,"input",2,"PM","trimf",[16 32 48]); a=addmf(a,"input",2,"PB","trimf",[32 48 64]); %输出u,范围[-90,90],7 个模糊语言,NB,NM,NS,Z,PS,PM,PB a=addvar(a,"output","u",[-90 90]); %Parameter u a=addmf(a,"output",1,"NB","trimf",[-90 -65 -45]); a=addmf(a,"output",1,"NM","trimf",[-65 -45 -25]); a=addmf(a,"output",1,"NS","trimf",[-45 -25 0]); a=addmf(a,"output",1,"Z","trimf",[-25 0 25]); a=addmf(a,"output",1,"PS","trimf",[0 25 45]); a=addmf(a,"output",1,"PM","trimf",[25 45 65]); a=addmf(a,"output",1,"PB","trimf",[45 65 90]); %模糊规则表,7*7=49 行,5 列 rulelist=[1 1 1 1 1; 1 2 1 1 1; 1 3 1 1 1; 1 4 2 1 1; 1 5 2 1 1; 1 6 3 1 1; 1 7 4 1 1;
农林大学计算机与信息学院 信息工程类 实验报告 课程名称:计算机网络 姓名: 系:计算机科学与技术系 专业:计算机科学与技术 年级:2011级 学号: 指导教师:周术成老师 职称: 2014年 5 月 4 日
农林大学计算机与信息学院实验报告 系:计算机与信息系专业:计算机科学与技术年级:2011 :学号:实验课程:_ 计算机网络 实验室号____田C-305__ 计算机号:实验时间: 指导教师签字:成绩: 实验一以太网组网实验 1.实验目的和要求 1.熟悉局域网所使用的基本设备 2. 掌握以太网组建方法 3. 掌握网络连通性测试方法 2.实验原理 以太网事实上是一簇局域网技术,不同的以太网在链路层帧头的格式、电缆的类型和传输速度上有很大的差异以太网可以利用同轴电缆、双绞线、光缆等不同的传输介质进行组网,也可以运行10Mb/s、100Mb/s、1000Mb/s 的网络速度。不管采用何种传输介质,以及网络速度各不相同,只要是以太网,采用的都是CSMA/CD介质访问控制方法。即任何结点没有可预约的发送时间,所有结点平等地争用发送时间,并随机地发送数据。 组建局域网常用的传输介质为双绞线,作为10BASE-T 和100BASE-TX 以太网的传输介质,非屏蔽双绞线在组网中起着重要的作用。非屏蔽双绞线UTP 中的8 芯导线采用了不同的颜色,分成4 对,其中橙和橙白一对,绿和绿白一对,蓝和蓝白一对,棕和棕白一对。以太网使用的UTP 分为直通UTP 和交叉UTP。 UTP 双绞线有两种接法:T568A 标准和T568B 标准。 直通UTP:线的两头都按T568B 线序标准连接。 交叉UTP:线的一头按T568A 线序连接,另一头按T568B 线序连接。 组装不同类型的局域网需要不同的设备,10Base-T 和100Base-TX 组网所需要的设备有:UTP 电缆、以太网卡、10M/100M 集线器、以太网交换机等。现在的以太网在逻辑上采用星型拓扑结构,用这种拓扑结 构,每台计算机用电缆线连接到共享网络设备上,如集线器和交换机等。 集线器和交换机都是用以太网接口连接多台设备,然而,它们在实现上有很大不同。集线器是第1 层设备,是以太网的集中连接点,具有信号放大功能,扩大以太网的地理围。通常采用RJ-45 接口,计算 机或其他终端设备通过双绞线电缆与集线器相连。当数据到达集线器的一个端口后,集线器不进行过滤处 理,直接将收到的数据包复制并广播到所有其他的端口,而不管这些端口连接的设备是否需要这些数据。 因此,网络中集线器数量越多,整个网络的性能就越差。 一般以太网的拓扑既用到集线器也用到交换机,集线器连接到交换机端口上,计算机连接到集线器上。在这种配置里,连接在同一集线器的计算机能看到彼此传输的数据,并且一次只能有一个传输;但在
文档来源为:从网络收集整理.word版本可编辑.欢迎下载支持. 第一部分常用电子测量仪器的使用 本部分主要涉及实验要用到的三种仪器:数字示波器、信号发生器和稳压电源。学生在自学了《电子技术应用实验教程综合篇》(后称教材)第一章内容后,填空完成这部分的内容。 一、学习示波器的应用,填空完成下面的内容 示波器能够将电信号转换为可以观察的视觉图形,便于人们观测。示波器可分为模拟示波器和数字示波器两大类。其中,模拟示波器以连续方式将被测信号显示出来;而数字示波器首先将被测信号抽样和量化,变为二进制信号存储起来,再从存储器中取出信号的离散值,通过算法将离散的被测信号以连续的形式在屏幕上显示出来。我们使用的是数字示波器。 使用双踪示波器,能够同时观测两个时间相关的信号。信号通过探头从面板上的通道1 和通道2 端送入,分别称为CH1和CH2。 在使用示波器时,需要注意以下几点: (1)正确选择触发源和触发方式 触发源的选择:如果观测的是单通道信号,就应选择该信号作为触发源;如果同时观测两个时间相关的信号,则应选择信号周期大(大/小)的通道作为触发源。 (2)正确选择输入耦合方式 应根据被观测信号的性质来选择正确的输入耦合方式。如图1.1所示,输入耦合方式若设为交流(AC),将阻挡输入信号的直流成分,示波器只显示输入的交流成分;耦合方式设为直流(DC),输入信号的交流和直流成分都通过,示波器显示输入的实际波形;耦合方式设为接地(GND),将断开输入信号。 已知被测信号波形如图1.2所示,则在图1.3中, C 为输入耦合方式为交流(AC)时的波形, A 为输入耦合方式为直流(DC)时的波形, B 为输入耦合方式为接地(GND)时的波形。 (3)合理调整扫描速度 调节扫描速度旋钮,可以改变荧光屏上显示波形的个数。提高扫描速度,显示的波形少;降低扫描速度,显示的波形多。在实际测试时,显示的波形不应过多,以保证时间测量的精度。 (4)波形位置和几何尺寸的调整 观测信号时,波形应尽可能处于荧光屏的中心位置,以获得较好的测量线性。正确调整垂直衰减旋钮,尽可能使波形幅度占一半以上,以提高电压测量的精度。为便于读数,一般我们调节Y轴位移使0V位置位于示波器显示窗口中的暗格上。 数字示波器中被测信号0V标志位于示波器屏幕显示区的左侧。 在使用示波器前,需要检查示波器探头的好坏。简述检查的方法。 1文档来源为:从网络收集整理.word版本可编辑.