基于曲柄摇杆机构和凸轮机构的四足机器人步态分析
- 格式:pdf
- 大小:138.65 KB
- 文档页数:2
基于凸轮连杆机构驱动的四足水下机器人构型设计摘要:本文通过对现有多足式水下机器人研究分析,提出一种基于凸轮连杆机构驱动、步距可调的四足水下机器人。
本文针对该机器人系统组成、单腿系统和运动原理进行简要介绍,这将为多足水下机器人的研究提供依据。
关键词:水下机器人;凸轮连杆机构;潜航体结构由于陆地资源的减少,水下资源成为人们关注的焦点。
因此,各国研究人员对海底资源开发与勘测进行不同程度的探索。
通常情况下,人们希望使用机器人代替人类在水下环境中进行工作,并且水下机器人具有机动灵活、能够在水中长时间工作等特点。
因此,在海洋学研究、水文地理研究和水下工程等方面,水下机器人都得到了广泛应用[1]。
1. 多足式水下机器人构型发展现状2000年,美国海军研究局与东北大学船舶科学中心, 共同研制出一种具有8条腿的水下仿生机器龙虾。
研究人员采用形状记忆合金仿制出龙虾肌肉,通电加热使龙虾的腿向上运动;冷却时恢复形状。
同时,8条腿可使它朝着任意一个方向移动,爪子和尾巴则可使在湍急的水流以及其他环境下保持身体稳定性。
2002年,英国巴斯大学研制出一款用于水下勘察探测的多足水下机器人。
其外形与螃蟹十分相似,两侧都有4条腿,能自如地攀爬越过鹅卵石和小碎石,非常稳定,可执行相应的指令而避免多足之间的不协调冲突。
这个机器人可在同一机动速度下行进,但通过改变步幅长度能够改变行走速度。
2006年,日本港湾空港技术研究所设计了一种用于海岸线等水边地区的地形自动测量的两栖六足机器人。
其所有关节具有相同的机械结构,作为防水单元时彼此独立,这使得该机器人组合相对简单,并且当需要维修时,腿和身体能够轻易的拆卸。
该机器人包括携带电池、控制器和通讯单元的机体,18个彼此独立的防水关节单元[3]。
2009年,德国不莱梅弗劳恩霍夫与德国DFKI人工智能研究中心合作开发具有灵敏触觉的仿章鱼水下机器人。
该机器人配备了应变仪,能在遇到障碍物时产生电阻变化,达到躲避障碍物[2]。
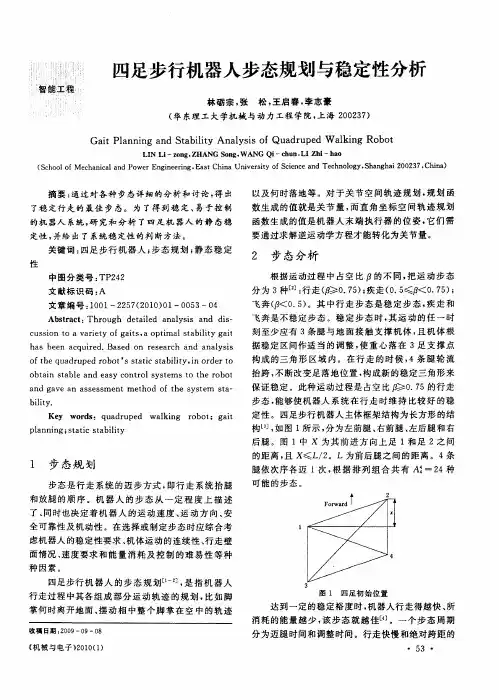
四足步行机器人步态规划及稳定性分析四足步行机器人是一种模仿动物步态的机器人,具有四个腿部,通过模拟动物行走方式实现机器人的移动。
步态规划是指确定机器人在行走过程中每个时刻各腿的位置和运动轨迹的过程。
稳定性分析是指机器人在行走过程中保持稳定的能力。
四足步行机器人的步态规划可以分为静态和动态两种方式。
静态步态规划是指机器人每一步的位置和姿态都是固定的,适用于行走速度较慢的情况。
动态步态规划是指机器人在行走过程中通过改变腿部的位置和姿态来保持平衡,适用于行走速度较快的情况。
在静态步态规划中,可以使用逆向动力学方法来确定机器人每个时刻各腿的位置和姿态。
首先,需要确定机器人的质心轨迹,然后根据机器人的动力学模型计算每个时刻各腿的位置和姿态,确保机器人的质心保持平衡。
在动态步态规划中,可以使用运动规划和控制方法来确定机器人每个时刻各腿的位置和姿态。
首先,需要确定机器人的期望轨迹,然后使用运动规划方法来生成机器人的轨迹。
接下来,使用控制方法来调整机器人的腿部位置和姿态,确保机器人的质心保持平衡。
稳定性分析是确保机器人在行走过程中保持平衡的重要部分。
稳定性分析可以通过线性和非线性控制方法来实现。
线性控制方法是指根据机器人的线性模型进行控制,通过调整机器人的控制参数来保持平衡。
非线性控制方法是指根据机器人的非线性模型进行控制,通过调整机器人的非线性参数来保持平衡。
稳定性分析还可以通过模拟和实验方法来进行。
模拟方法是通过建立机器人的动力学模型,使用数值计算方法来模拟机器人在行走过程中的稳定性。
实验方法是通过实际建造机器人,并进行实验来验证机器人在行走过程中的稳定性。
总之,四足步行机器人的步态规划和稳定性分析是实现机器人行走的关键。
通过合适的步态规划方法和稳定性分析方法,可以实现机器人的平衡行走,进而实现各种应用,如救援、探险等。
《四足机器人行走机构研究与设计》一、引言四足机器人行走机构作为现代机器人技术的重要组成部分,具有广泛的应用前景和实际意义。
它不仅可以用于工业生产中的物料搬运、装配等任务,还可以在救援、勘探、军事等领域发挥重要作用。
因此,本文将就四足机器人行走机构的研究与设计进行探讨,旨在为相关领域的研究和应用提供参考。
二、四足机器人行走机构的研究现状目前,国内外学者对四足机器人行走机构进行了广泛的研究。
其中,国内外的机器人行走机构主要分为两大类:一类是以日本、美国等国家为代表的仿生四足机器人,其设计灵感来源于自然界中的动物,具有较高的灵活性和适应性;另一类是以中国、欧洲等国家为代表的基于动力学原理的四足机器人,其设计注重稳定性和运动效率。
在研究方法上,国内外学者主要采用理论分析、仿真分析和实验验证等方法。
其中,理论分析主要研究机器人的运动学和动力学特性;仿真分析则通过建立机器人模型,模拟其在实际环境中的运动过程;实验验证则通过实际搭建机器人进行实验测试,验证理论分析和仿真分析的正确性。
三、四足机器人行走机构的设计针对四足机器人行走机构的设计,本文提出了一种基于动力学原理的设计方案。
该方案主要包括机械结构设计和控制系统设计两部分。
(一)机械结构设计机械结构设计是四足机器人行走机构设计的关键部分。
本文设计的机械结构主要由四个腿部、身体和驱动装置等部分组成。
其中,每个腿部包括大腿、小腿和足部三个部分,通过驱动装置实现腿部的运动。
此外,为了确保机器人的稳定性和灵活性,还设计了相应的关节和连接件。
(二)控制系统设计控制系统是四足机器人行走机构的另一个重要部分。
本文设计的控制系统主要包括传感器、控制器和执行器等部分。
其中,传感器用于感知机器人的状态和环境信息,控制器则根据传感器的信息控制执行器的运动,从而实现机器人的行走。
此外,为了实现机器人的智能化和自主化,还设计了相应的算法和程序。
四、实验验证与分析为了验证本文设计的四足机器人行走机构的可行性和性能,我们进行了实验测试。
四足机器人运动学分析及步态研究四足机器人是一种模仿动物四足步态的机器人,它在军事、医疗、救援等领域具有重要的应用前景。
这种机器人能够在不平坦的地面上行走,具有良好的适应性和稳定性。
因此,对四足机器人运动学分析和步态研究具有重要的意义。
对于四足机器人的位姿解析,主要是通过一系列传感器获取机器人的姿态参数,如位置、方向和速度等,并通过数学模型将这些参数转化为机器人的位姿信息。
位姿解析的主要目的是得到机器人在三维空间中的运动状态和位置。
关节解析是指对机器人的关节进行解析和研究。
关节解析是通过分析机器人关节的运动规律和关节空间中的位置关系,确定机器人各个关节的位置和姿态。
关节解析的主要目的是为机器人控制系统提供关节控制的基础数据。
末端执行器控制是指对机器人末端执行器进行控制的过程。
末端执行器控制是依据机器人的运动学参数和控制算法,控制机器人的末端执行器的位置和姿态。
末端执行器控制通常包括位置控制和力控制两种方式,通过调节控制信号,使机器人达到预定的位置和力矩要求。
步态研究是对四足机器人行走步态进行研究和优化的过程。
步态是机器人运动的基本形式,确定合适的步态对于机器人的运动和稳定性非常重要。
步态研究主要包括步态规划、步态分析和步态优化等内容。
步态规划是指确定四足机器人行走的步长、步高和步频等参数的过程。
步态规划的目的是通过合理的参数选择,使机器人能够在不同的地形上行走,具有稳定的步态和良好的适应性。
步态分析是对机器人步态进行分析和评估的过程。
通过分析机器人行走时的关节角度、应力分布和能量消耗等参数,评估机器人行走的稳定性和效率,并对步态进行优化。
步态优化是对机器人步态进行优化和改进的过程。
通过对步态参数和控制算法的调整,进一步提高机器人的行走性能和适应能力。
步态优化的目标是使机器人能够在各种复杂环境下行走,具有更好的平衡能力和敏捷性。
综上所述,四足机器人的运动学分析和步态研究是实现其稳定行走和适应不同环境的关键技术。

《复杂环境下四足机器人的姿态及步态稳定控制方法研究》一、引言随着科技的进步,四足机器人已成为现代机器人研究领域的热点之一。
在复杂环境中,如非结构化地形或未知的户外环境,四足机器人凭借其出色的适应性和灵活性而受到广泛关注。
然而,实现四足机器人在复杂环境下的姿态和步态稳定控制,是一项充满挑战性的任务。
本文旨在探讨复杂环境下四足机器人的姿态及步态稳定控制方法,为四足机器人的进一步应用提供理论支持和技术支撑。
二、四足机器人姿态稳定控制方法1. 传感器数据融合技术采用多传感器融合技术,包括激光雷达、相机等,对机器人所处环境的姿态进行实时监测。
通过传感器数据融合,可以有效降低单传感器的误差,提高姿态信息的准确性。
2. 基于深度学习的姿态识别算法引入深度学习算法,通过大量训练样本学习姿态特征。
在姿态识别过程中,算法能够实时捕捉机器人姿态的变化,并通过反馈机制调整姿态,以达到稳定控制的目的。
3. 动态平衡控制策略针对四足机器人的动态平衡问题,采用基于PID(比例-积分-微分)控制算法的动态平衡控制策略。
该策略可根据机器人的当前状态和目标状态进行实时调整,有效保持机器人的稳定姿态。
三、四足机器人步态稳定控制方法1. 步态规划算法设计适用于复杂环境的步态规划算法。
根据地面状况和机器人的运动需求,规划出合理的步态轨迹。
通过优化算法参数,实现步态的平滑过渡和快速响应。
2. 步态调整策略针对复杂环境中的未知障碍物和地形变化,采用基于机器学习的步态调整策略。
通过分析历史运动数据和实时环境信息,自动调整步态参数,以适应不同环境下的运动需求。
3. 力学分析与优化通过对四足机器人行走过程中的力学分析,对腿部结构和步态参数进行优化。
降低机器人行走过程中的能耗,提高行走效率和稳定性。
四、实验与分析为验证所提方法的有效性,本文在多种复杂环境下进行了实验分析。
实验结果表明,通过多传感器融合技术和深度学习算法的姿态识别方法能够有效地提高四足机器人的姿态稳定性;同时,采用步态规划算法和机器学习技术的步态调整策略能够在不同环境中实现步态的快速调整和稳定行走。
《复杂环境下四足机器人的姿态及步态稳定控制方法研究》一、引言随着机器人技术的不断发展,四足机器人因其出色的地形适应能力和良好的动态性能,在复杂环境中展现出巨大的应用潜力。
然而,在复杂环境中,四足机器人面临着姿态和步态稳定性的挑战。
本文旨在研究复杂环境下四足机器人的姿态及步态稳定控制方法,以提高机器人在不同环境中的稳定性和适应性。
二、四足机器人概述四足机器人是一种模拟生物运动的机器人,其通过四个腿部机构的运动实现行进。
其运动过程涉及到姿态和步态的协调与控制,这直接关系到机器人的稳定性和工作效率。
三、复杂环境下的姿态稳定控制方法1. 传感器系统设计:为了实时监测四足机器人的姿态变化,需要设计一套高精度的传感器系统。
该系统包括陀螺仪、加速度计等,能够实时获取机器人的位置、速度和姿态信息。
2. 姿态估计与反馈:通过传感器系统获取的数据,利用算法进行姿态估计,并将估计结果与期望姿态进行对比,形成反馈信号。
该信号将用于调整机器人的运动状态,以实现姿态的稳定控制。
3. 姿态控制策略:根据反馈信号,采用适当的控制策略对四足机器人的姿态进行调整。
常用的控制策略包括PID控制、模糊控制等。
这些策略能够根据环境变化和机器人状态,实时调整控制参数,以实现姿态的稳定控制。
四、复杂环境下的步态稳定控制方法1. 步态规划:根据不同的地形和环境条件,制定合理的步态规划。
步态规划应考虑到机器人的运动速度、负载等因素,以确保步态的稳定性和效率。
2. 步态调整:在运动过程中,根据实时反馈的姿态信息和环境信息,对步态进行调整。
这包括调整步长、步频等参数,以适应复杂环境中的地形变化。
3. 动态调整策略:当机器人遇到突发情况或地形变化时,应采用动态调整策略。
该策略能够根据实时信息,快速调整步态规划,以保持机器人的稳定性和运动能力。
五、实验与分析为了验证所提方法的有效性,进行了多组实验。
实验结果表明,通过合理的传感器系统设计和姿态估计方法,能够实时获取四足机器人的姿态信息;采用适当的控制策略和步态规划方法,能够在复杂环境中实现姿态和步态的稳定控制;动态调整策略能够快速适应突发情况和地形变化,提高机器人的适应性和稳定性。
《一种新型四足仿生机器人性能分析与仿真》篇一一、引言随着科技的飞速发展,四足仿生机器人作为机器人技术的重要分支,已经在许多领域展现出其巨大的应用潜力。
本文将针对一种新型四足仿生机器人进行性能分析与仿真,从结构特点、运动性能、环境适应性、能源管理、控制算法和仿真实验等多个方面展开论述,以期为四足仿生机器人的进一步研究和应用提供有益的参考。
二、结构特点该新型四足仿生机器人采用模块化设计,结构紧凑且具有较高的可靠性。
其关键组成部分包括仿生足部、驱动系统、控制系统等。
仿生足部的设计借鉴了真实生物的运动特性,使其在各种复杂地形中都能保持良好的运动性能。
驱动系统采用先进的电机和传动装置,保证了机器人的动力性能和运动速度。
控制系统则采用先进的算法和传感器,实现了对机器人运动的高效控制。
三、运动性能该新型四足仿生机器人具备较高的运动性能。
在平地、斜坡、台阶等不同地形条件下,机器人都能实现稳定的步行和奔跑。
同时,机器人还具备快速转向和爬行等功能,使其在复杂环境中具有较强的适应能力。
此外,机器人还具备较高的负载能力,可应用于搬运、救援等领域。
四、环境适应性该新型四足仿生机器人具有较强的环境适应性。
其仿生足部设计使得机器人在复杂地形中能够保持稳定的运动。
此外,机器人还具备较高的越障能力,可轻松跨越障碍物。
同时,机器人还具备防水、防尘等特性,使其在恶劣环境中也能保持良好的性能。
五、能源管理为保证机器人的持续运行和长时间工作,该新型四足仿生机器人采用先进的能源管理策略。
其中,电池系统采用了高性能的锂离子电池,保证了机器人的续航能力。
此外,机器人还具备能量回收功能,将多余的能量转化为电能存储起来,进一步提高能源利用效率。
同时,控制系统根据实际需要实时调整电机的工作状态,以达到最佳的能源利用效果。
六、控制算法该新型四足仿生机器人采用先进的控制算法,实现了对机器人运动的高效控制。
其中,基于深度学习的控制算法使得机器人在面对复杂环境时能够快速做出决策并调整运动状态。
专利名称:一种基于曲柄摇杆的轮足式四足机器人专利类型:发明专利
发明人:杨东超,吴庆园,李腾,朱衡,陶铂,黄赓
申请号:CN202110025512.3
申请日:20210108
公开号:CN112810720A
公开日:
20210518
专利内容由知识产权出版社提供
摘要:本发明提供一种基于曲柄摇杆的轮足式四足机器人,轮足式四足机器人包括机体和多个行走单元,行走单元两两成对地设置于机体的两侧,行走单元包括:第一驱动装置、髋关节支架、第二驱动装置、大腿支架、第三驱动装置、滚轮和腿部机构;第一驱动装置分别与髋关节支架、机体连接,适于驱动髋关节支架围绕第一驱动装置的转轴转动;第二驱动装置分别与髋关节支架、大腿支架连接,适于驱动大腿支架围绕第二驱动装置的转轴转动;第三驱动装置分别与大腿支架、滚轮连接,适于驱动滚轮转动;本发明提供的轮足式四足机器人可在轮式行走和足式行走之间反复切换,轮式行走时,滚轮是由第三驱动装置直接驱动,小腿和膝关节无需自锁,有利于承载较大的重量。
申请人:清华大学
地址:100084 北京市海淀区双清路30号清华大学100084
国籍:CN
代理机构:北京路浩知识产权代理有限公司
代理人:张建利
更多信息请下载全文后查看。