声发射源线性定位误差研究
- 格式:pdf
- 大小:372.75 KB
- 文档页数:2
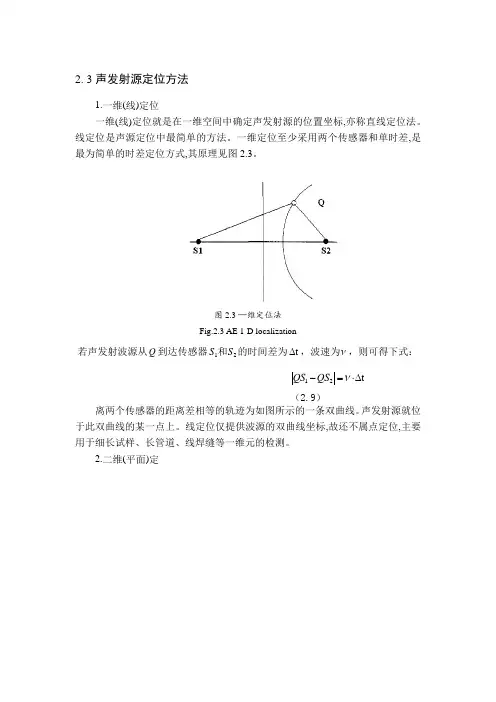
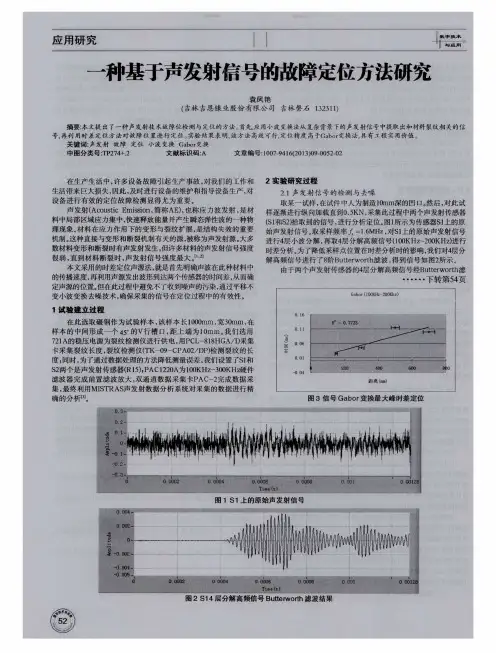
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
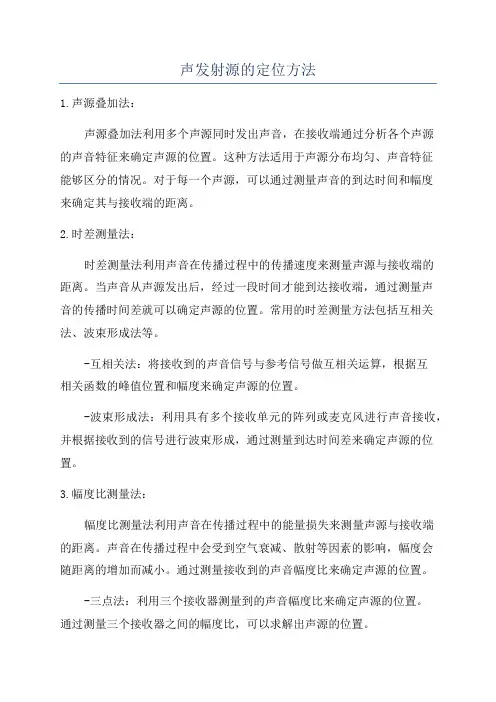
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
声音定位和声源识别算法研究综述声音定位和声源识别是现代信号处理领域的重要研究方向之一。
随着智能音箱、语音助手等智能设备的普及,声音定位和声源识别技术得到了广泛的应用和关注。
本文将综述声音定位和声源识别算法的研究进展,介绍其应用领域和未来发展趋势。
一、声音定位算法的研究声音定位是指根据接收到的声音信号确定声源的方位角和俯仰角的过程。
声音定位算法主要分为基于时差的方法和基于能量的方法两种。
基于时差的方法利用声音信号在不同麦克风之间传播的时间差来确定声源的方位角。
常用的方法包括互相关法、波束形成法和最小二乘法等。
互相关法通过计算麦克风信号之间的互相关函数来估计时差,进而得到声源的方位角。
波束形成法则是通过对麦克风信号进行加权和相位调节,使得声源方向上的信号增益最大,从而实现声音定位。
最小二乘法则是通过最小化麦克风信号与声源信号之间的误差平方和,来估计声源的方位角。
基于能量的方法则是通过对声音信号的能量进行分析,来确定声源的方位角。
常见的方法包括声音强度法和声音梯度法。
声音强度法通过计算麦克风信号的能量差来确定声源的方位角。
声音梯度法则是通过计算麦克风信号的梯度来确定声源的方位角。
二、声源识别算法的研究声源识别是指根据接收到的声音信号判断声源的种类或身份的过程。
声源识别算法主要分为基于特征提取的方法和基于机器学习的方法两种。
基于特征提取的方法通过对声音信号的频谱、时域特征等进行提取和分析,来判断声源的种类或身份。
常见的特征包括MFCC(Mel Frequency Cepstral Coefficients)、SVM(Support Vector Machine)等。
MFCC是一种常用的声音特征提取方法,它通过将声音信号映射到梅尔频率尺度上,并提取其倒谱系数,从而得到一组具有较好区分能力的特征向量。
SVM则是一种常用的机器学习算法,它通过构建一个最优的超平面来实现声源的分类。
基于机器学习的方法则是通过训练一组声音样本,建立声音模型,并利用该模型对新的声音信号进行分类。
声源定位精度与方法比较分析声源定位是通过分析传感器接收到的声音信号来确定声源位置的过程。
声源定位精度和方法选择是声源定位技术中关键的问题。
在这篇文章中,我们将比较分析不同声源定位方法的精度和适用性,以便更好地了解这些方法的优缺点。
首先,我们将讨论几种常见的声源定位方法,包括时间差定位、幅度差定位和交叉相关定位。
时间差定位是通过测量声音信号在不同传感器之间传播的时间差来确定声源位置。
这种方法简单直接,不需要复杂的处理过程。
然而,时间差定位的精度受到传感器之间距离的限制,尤其是在远距离下会受到较大误差。
另外,时间差定位对声音波形的变化敏感,因此需要保持较高的信噪比。
幅度差定位是通过测量声音信号在不同传感器之间的幅度差来确定声源位置。
这种方法相对于时间差定位对传感器间距离的要求较小。
它在短距离定位时表现良好,但在远距离下容易受到噪声的影响,精度会下降。
交叉相关定位是通过计算不同传感器接收到的声音信号互相关来确定声源位置。
这种方法可以减小噪声的影响,具有较好的定位精度。
但是,交叉相关定位需要对多个信号进行处理,计算复杂度较高。
此外,它对传感器之间的同步性要求较高,需要高精度的时钟同步。
除了上述方法外,还有一些新兴的声源定位方法被提出,如基于阵列信号处理的波束形成和机器学习方法。
波束形成是一种通过加权和合成多个传感器接收到的信号来增强特定方向上的声源信号的方法。
它可以有效地抑制噪声和干扰,提高定位精度。
由于波束形成需要利用传感器阵列的空间滤波效果,因此对声源方向的估计精确度较高。
机器学习方法则是利用机器学习算法对声音信号进行处理和分析,从而实现声源定位。
通过训练模型,可以根据声音信号的特征来预测声源位置。
这种方法可以适应不同环境下的声音特征变化,并且具有较高的准确性。
然而,机器学习方法需要大量的训练数据和计算资源。
综上所述,声源定位精度和方法的选择取决于具体的应用需求和环境条件。
如果对定位精度要求较高且传感器间距较远,可以选择交叉相关定位或波束形成方法。
声发射源的定位方法1.声源叠加法:声源叠加法利用多个声源同时发出声音,在接收端通过分析各个声源的声音特征来确定声源的位置。
这种方法适用于声源分布均匀、声音特征能够区分的情况。
对于每一个声源,可以通过测量声音的到达时间和幅度来确定其与接收端的距离。
2.时差测量法:时差测量法利用声音在传播过程中的传播速度来测量声源与接收端的距离。
当声音从声源发出后,经过一段时间才能到达接收端,通过测量声音的传播时间差就可以确定声源的位置。
常用的时差测量方法包括互相关法、波束形成法等。
-互相关法:将接收到的声音信号与参考信号做互相关运算,根据互相关函数的峰值位置和幅度来确定声源的位置。
-波束形成法:利用具有多个接收单元的阵列或麦克风进行声音接收,并根据接收到的信号进行波束形成,通过测量到达时间差来确定声源的位置。
3.幅度比测量法:幅度比测量法利用声音在传播过程中的能量损失来测量声源与接收端的距离。
声音在传播过程中会受到空气衰减、散射等因素的影响,幅度会随距离的增加而减小。
通过测量接收到的声音幅度比来确定声源的位置。
-三点法:利用三个接收器测量到的声音幅度比来确定声源的位置。
通过测量三个接收器之间的幅度比,可以求解出声源的位置。
4.高斯法:高斯法采用统计学方法,通过分析接收到的声音信号的统计特性来确定声源的位置。
该方法需要进行大量的声音信号采集和处理,通过建立声音信号的统计模型来推测声源的位置。
综上所述,声发射源的定位方法包括声源叠加法、时差测量法、幅度比测量法和高斯法等。
这些方法可以单独或者结合使用,根据实际应用场景和传感器条件的不同,选择合适的定位方法来实现声发射源的定位。
第48卷第3期GiJ送坊2022年3月Sichuan Building Materials Vol.4&No.3 March,2022基于数值模拟的钢桥面板声发射源定位研究黄静(中铁长江交通设计院集团有限公司,重庆401121)摘要:正交异性钢桥面板的疲劳裂纹监测,对于桥梁结构的运营维护及安全具有重要的意义。
声发射检测技术可以对裂纹进行实时动态监测。
本文基于ABAQUS动力显式分析方法,对声发射信号在带U肋钢板中的传播过程进行模拟。
采用集中脉冲荷载的形式模拟断铅声发射源,依据声发射信号的频率特点,确定有限元模型的网格划分大小和计算时间步长,从而获得对应位置和传播距离的声发射信号,并采用时差定位法对声发射源进行定位。
结果表明:本文所采用的集中脉冲荷载及模型能够有效模拟断铅产生的声发射信号以及其在实际钢板内的传播过程,时差定位法对于结构内部的声发射源定位精度较高,而对靠近结构边界的声发射源进行定位时,会产生较大的误差。
关键词:声发射;正交异性钢桥面板;断铅试验;有限元分析;时差定位中图分类号:U441.4文献标志码:A文章编号:1672-4011(2022)03-0117-03DOI:10.3969/j.issn.1672-4011.2022.03.058Research on acoustic emission source location of steel bridge panel based on numerical simulationHUANG Jing(China Railway Yangtze River TransportationDesign Institute Group Co.,Ltd.,Chongqing401121,China) Abstract:The fatigue crack monitoring of orthotropic steel bridge deck is very important for the operation,maintenance and safety of bridge structure.Acoustic emission detection technology can conduct real-time dynamic monitoring of cracks.In this paper, based on ABAQUS dynamic explicit analysis method,the propagation process of acoustic emission signals in u-rib plate is simulated.The form of concentrated pulse load was used to simulate the acoustic emission source of lead break.According to the frequency characteristics of acoustic emission signal,the mesh division size and calculation time step of finite element model were determined to obtain the acoustic emission signal of the corresponding position and propagation distance,and the acoustic e-mission source was located by the time-difference positioning method.The results show that the concentrated pulse load and model adopted in this paper can effectively simulate the acoustic emission signal generated by lead breakage and its propagation process in the actual steel plate.The time difference of arrival (TDOA)has a high positioning accuracy for acoustic emission sources inside the structure,while a large error will be generated if acoustic emission sources close to the structure boundary.Key words:acoustic emission;orthotropic steel deck;pencil-lead breakage;finite element analysis;time difference of arrival收稿日期:2021-04-08作者简介:黄静(1982—),男,重庆人,硕士,工程师,主要研究方向:桥梁工程。
2. 3声发射源定位方法1.一维(线)定位一维(线)定位就是在一维空间中确定声发射源的位置坐标,亦称直线定位法。
线定位是声源定位中最简单的方法。
一维定位至少采用两个传感器和单时差,是最为简单的时差定位方式,其原理见图2.3。
图2.3 —维定位法Fig.2.3 AE 1-D localization 若声发射波源从Q 到达传感器21S S 和的时间差为t ∆,波速为ν,则可得下式: t 21∆⋅=-νQS QS(2.9)离两个传感器的距离差相等的轨迹为如图所示的一条双曲线。
声发射源就位于此双曲线的某一点上。
线定位仅提供波源的双曲线坐标,故还不属点定位,主要用于细长试样、长管道、线焊缝等一维元的检测。
2.二维(平面)定图2.4 二维(平面)定位法Fig.2.4 AE 2-D localization二维定位至少需要三个传感器和两组时差,但为得到单一解一般需要四个传感器三组时差。
传感器阵列可任意选择,但为运算简便,常釆用简单阵列形式,如三角形、方形、菱形等。
近年来,任意三角形阵列及连续多阵列方式也得到应用。
就原理而言,波源的位置均为两组或三组双曲线的交点所确定。
由四个传感器构成的菱形阵列平面定位原理见图2.4。
若由传感器31S S 和间的时差X t ∆所得双曲线为1,由传感器42S S 和间的时Y t ∆所得双曲线为2,波源Q 离传感器31S S 和,42S S 和的距离分别为Y X L L 和,波速为ν,两组传感器间距分别为a 和b ,那么,波源就位于两条双曲线的交点()Y X Q ,上,其坐标可由下面方程求出: ⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛=⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛-⎪⎭⎫ ⎝⎛122b 2122a 22222222222Y Y X X L X L Y L Y L X (2.10)平面定位除了上述菱形定位方式外,常见的还有三角形定位、四边形定位、传感器任意布局定位等。
石灰岩声发射分析及源定位研究关键词:声发射石灰岩互相关声发射源定位材料或结构在受力或其他作用下产生变形或断裂,产生瞬间弹性波的现象称为声发射(acoustic emission, ae)[1]。
声发射可以对岩石类材料内部裂纹的产生和扩展进行连续监控,是目前应用于岩石类材料破坏研究领域的重要手段[2]。
现阶段声发射源定位是通过在岩石样品表面安装多个传感器来获取声发射信号的时间差来实现损伤定位[3]。
国内外很多学者围绕声发射的产生机理进行了深入而广泛的研究,取得了重要成果。
对岩石类材料声发射源进行定位研究,可以实现对其内部损伤的分析[4],做好安全预警,为岩石破裂失稳预报奠定了一定的工作基础。
一、小波分析小波变换(wavelet transform)是1984年法国地球物理学家j.morlet在分析处理地球物理勘探资料时提出来的,其后理论物理学家a.grossman采用平移和伸缩不变性建立了小波变换的理论体系。
小波分析是一种新兴技术,基本思想可以简单概括为:自然界各种信号中频率高低不同的分量具有不同的时变特性,一般是低频成分的频谱特征随时间的变化比较缓慢,需要在时间域具有较高的精度,而高频成分的频谱特征则变化较快,需要频率域具有较高的精度。
能够在“高中心频率”时自动变窄,而在“低中心频率”时自动变宽。
1.小波去噪二维定位情况下考虑一组传感器(3个),通过小波分析对接收到的声发射信号进行去噪处理,滤除信号中的部分噪声,使得声发射信号更精确地反映岩石内部损伤的过程。
从信的角度来说,小波去噪是对信号进行滤波,在去噪后还能成功地保留原始信号的特征号学,所以在这一点上优于传统的低通滤波器。
因此,小波去噪实际上是提取特征参数和低通滤波功能的综合。
2.互相关分析两个随机的时间历程和互相关函数的定义是在时,在时乘积的平均值,即:如果对,均以的时间间隔进行采样,而单位延迟时间,那么,。
n为延迟时间序列,r为时间序列,则可写成:由于互相关函数和都有物理单位,互相关函数值的大小不能说明这两个函数的相关程度如何,而且需要严格的尺度和物理量换算过程,因此在实际处理中,常用互相关系数来表达,即:以上分析可以看出,找出互相关系数最大值对应的时刻,即可确定两个传感器之间接收到信号的时差。
㊀2021年㊀第5期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2021㊀No.5㊀基金项目:国家重点研发计划项目(2018YFF0214703)收稿日期:2020-06-04声发射检测信号分析及源定位方法研究童国炜,周循道,黄林轶,陈超英,徐华伟,杨㊀林(工业和信息化部电子第五研究所,智能产品质量评价与可靠性保障技术工业和信息化部重点实验室,广东广州㊀510610)㊀㊀摘要:文中设计了一种可弱化噪声干扰和频散效应的定位算法,采用变分模态分解方法将声发射信号分解为若干个不同频带宽度的模态函数,并通过合并含有主要能量成分的模态函数获得声发射源信号的主要成分,最后采用互相关分析方法确定声源位置㊂实验结果表明,文中所提算法对声发射源定位是有效的㊁精确的,在一维和二维AE源定位实验中,文中所提方法综合定位误差在5%以内㊂关键词:无损探伤;声发射;定位;变分模态分解;互相关分析中图分类号:TP277㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2021)05-0096-05AcousticEmissionSignalAnalysisandSourceLocalizationMethodResearchTONGGuo⁃wei,ZHOUXun⁃dao,HUANGLin⁃yi,CHENChao⁃ying,XUHua⁃wei,YANGLin(The5thElectronicResearchInstituteofMinistryofIndustryandInformationTechnology,KeyLaboratoryofMIITforIntelligentProductsTestingandReliability,Guangzhou510610,China)Abstract:Thispaperdesignedalocalizationalgorithmthatcanweakennoiseinterferenceanddispersionphenomenon.Thevariationalmodaldecompositionmethodwasusedtodecomposetheacousticemissionsignalintoseveralmodalfunctionswithdif⁃ferentfrequencybandwidths.Themaincomponentsofthesignalwereobtainedbycombiningthemodalfunctionswhichcontainthemainenergycomponents,andfinallythecross⁃correlationanalysiswasusedtodeterminethesourcelocation.Experimentalresultsshowthatthealgorithmproposedinthispaperiseffectiveandaccurateforthesourcelocation,thecomprehensivelocationerroroftheproposedmethodislessthan5%intheoneandtwodimensionalacousticemissionsourcelocalizationexperiments.Keywords:nondestructivetesting;acousticemission;location;variationalmodaldecomposition;crosscorrelation0㊀引言声发射(acousticemission,AE)是一种由于裂痕扩展㊁摩擦㊁微动㊁冲击而产生的物理现象,通过定位AE源可实时监测㊁评估裂痕和损伤的状态,能够达到预防和控制潜在危险及确保监控对象安全运行的功能㊂由于其具有快速㊁无损㊁低能耗等特点,现已广泛应用于地震㊁爆炸㊁航空㊁军事㊁桥梁㊁隧道㊁矿山和能源等领域[1-2]㊂1912年,Geiger最先提出了一种基于地震波到达时间确定震源的方法[3]㊂受其启发,学术界涌现出了众多定位方法,并广泛地应用于工程领域中㊂针对现有AE源定位算法不能始终获得多层圆柱介质精确结果的问题,作者提出了一种考虑折射的AE源定位方法㊂实验结果表明,新方法可以在双层圆柱表面介质中获得准确的声发射源位置[4]㊂作者针对固定的弹性波速度和结构几何不规则性等问题,提出了一种没有预先测速的A∗定位方法㊂实验结果表明对于不规则的二维复杂结构,其定位精度得到了显著提高[5]㊂上述方法推动了AE定位技术的发展,但是这些方法在设计时未考虑到在工程实际应用过程中存在的环境测量噪声,同时也未考虑在非理想㊁非均匀㊁非完全弹性介质中传播的波会发生的频散现象,上述问题均会降低定位算法的准确性㊁可靠性,或者导致定位到现实中不存在的源㊂研究表明,通过信号分解方法将原始AE源信号按频率特征进行分解,并选择性地选取用于计算定位信息信号的验算策略可有效地弱化噪声和频散现象的不利影响㊂变分模态分解(variationalmodaldecomposition,VMD)方法[6]可通过非迭代的方式实现按最小估计带宽对信号的分解,借助信号能量分析方法可选择出用于计算定位信息的分量信号㊂因此,本文提出了一种融合了VMD方法和互相关分析方法的AE源定位算法㊂VMD方法将AE信号分解为若干个具有最小估计带宽的分量信号,能量分析方法挑选出信号的主要成分,互相关分析获得2个AE传感器之间的时间差,进而计算得出声源距离AE传感器的距离信息,实现了对声源准确㊁可靠的定位㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究97㊀㊀1㊀声发射及定位原理1.1㊀声发射如图1所示,AE系统包括3个部分:AE传感器㊁信号放大器和信号分析系统㊂AE系统在工作过程中,声源产生的瞬时弹性波以工程材料作为介质传播到材料表面,然后与材料表面放置的AE传感器进行耦合,通过压电效应将声波转换为电信号,最后经放大㊁采集可得到数字化信号,并采用适当的分析方法得到AE源的信息㊂图1㊀AE系统架构图1.2㊀定位当测量材料产生连续或间断的AE信号时,通过采集多个AE传感器中的信号,可分析出声发射源的位置及其他信息㊂图2以一维测量模型为例演示了定位算法㊂图2㊀AE一维定位模型一维模型一般存在2个或2个以上AE传感器[7],图2仅示意存在2个传感器的情况㊂设声发射源所产生的信号分别经过t1和t2时间达到传感器1和2,声音在材料中传播速度为v,可得如下关系:d=D-vΔt2Δt=t2-t1ìîíïïï(1)式中:d为AE源到传感器1的距离,m;D为传感器1㊁传感器2的距离,m;Δt为AE源到达传感器1㊁传感器2的时间差,s㊂当已知声波的传播速度v和Δt时,即可得到d,从而确定AE源的位置信息㊂本文采用Nielsen⁃Hsu实验确定值为3446m/s㊂采用互相关分析估计时延Δt,该方法计算速度快㊁运行损耗小㊂假设两侧传感器采集的AE信号分别为x(t)和y(t),则对应的数学模型如下所示:x(t)=s(t)+n1(t)y(t)=as(t-Δt)+n2(t){(2)式中:s(t)为AE源的信号;a为衰减参数;n1(t),n2(t)为环境噪声㊂在某一时间段T内,互相关系数为R(xy(Δt)=1TʏT0as(t)s(t-Δt)dt(3)观察式(3)可知,2个声发射信号是延迟时间Δt的函数,因此互相关系数分布的峰值点表示2个信号最大相关的位置,同时也代表了信号传播时差㊂基于一维定位模型理论,二维定位模型通过布置于平面内3个或3个以上传感器所获取的信息对AE源进行定位[8]㊂当获得1对传感器信息后,可在平面内获得1条双曲线函数,如图3(a)所示㊂当获得2对传感器信息后,即可在平面内确定2个声源点,如图3(b)所示㊂图3㊀二维定位模型假设P点为声发射源,传播到传感器1和传感器2的时间差和距离有如下关系:PF1-PF2=vΔt(4)当采集3个AE传感器的信号后,声发射源的位置会处于2条双曲线上的交叉点上㊂因此,需采集3个及3个以上AE传感器的信号才可以确定二维平面内声发射源的位置,如图3(b)所示,P1和P2为2条双曲线的交点,声发射源的位置在其中之一,选取时根据实际情况进行选择㊂1.3㊀信号预处理由于环境噪声和频散效应对声波的影响,直接使㊀㊀㊀㊀㊀98㊀InstrumentTechniqueandSensorMay.2021㊀用采集到的原始AE信号计算互相关系数,并查找判断延迟时间,所获得的结果会存在一定偏差㊂因此,选择合适的方法对原始信号进行有效的筛选㊁分析㊁优化是提高定位精确性和可靠性的关键㊂在信号分析领域中,VMD是基于信号时频特征的分解方法,通过非迭代的方式将信号分解为若干个拥有不同带宽的模态函数(modefunction,MF)㊂该方法认为每个MF分量有且只有一种频率成分构成,分解过程是寻求若干个MF,同时要保障每个MF所包含的带宽最小[6]㊂对于序列x(t),VMD可分解出K个MFuk(t),k=1,2, ,K:x(t)=ðKk=1uk(t)(5)MFuk(t)定义为uk(t)=Ak(t)cos[ϕk(t)](6)式中:Ak(t)为uk(t)的幅值;ϕk(t)为uk(t)的相位㊂对uk(t)使用Hilbert变换,可得解析信号及其单边谱:[σ(t)+jπt]uk(t)(7)通过指数调谐,即乘以e-jwkt,将估计uk(t)的中心频率移到基频附近:{[σ(t)+jπt]uk(t)}e-jwkt(8)式中wk为中心频率,wk=ϕᶄk(t)㊂带宽B[uk(t)]可通过解调信号的H1高斯平滑度进行估计:B[uk(t)]=∂t[σ(t)+jπt)uk(t)]e-jwkt22(9)最终,得到一个变分优化问题:minuk,wk{ðKk=1∂t[(σ(t)+jπt)uk(t)]e-jwkt22}s.t.ðKk=1uk(t)=x(t)(10)原始文献采用交替迭代乘子法进行求解㊂观察可知,VMD方法采用优化策略一次性获得所有分量,而且各MF的中心频率和带宽可被自适应计算出的同时,实现了对序列的频域剖析和MF分离㊂2㊀实验研究本文设计了AE定位测试系统,由3个AE传感器㊁3个前置放大器㊁1个8通道的数据采集卡㊁1个PC机,1个镀锌钢板组成㊂镀锌钢板长㊁宽为500mm,厚度为2mm,通过敲击产生AE源㊂实验模型如图4所示㊂镀锌钢板固定于桌面,3个AE传感器通过磁吸附的方法固定于镀锌钢板表面,AE传感器通过前置放大器与数据采集卡相连㊂图4㊀实验模型根据文献报道,敲击震动信号的峰值频率较低,因此,本文选用窄带低频的AE传感器采集声信号,相关参数列于表1㊂表1㊀传感器参数表谐振频率/kHz带宽频率/kHz灵敏度/dB尺寸/mm4020 11080Φ17ˑ16㊀㊀设计了针对一维和二维定位模型的实验,每种实验情况的传感器摆放方式和敲击位置又设定了不同的组合,通过组合可得4种实验情况,图5展示了传感器和敲击位置的具体坐标,表2列举了4个测试案例㊂㊀图5㊀实验布置图表2㊀实验分类模型类型敲击位置案例1一维敲击位置1案例2一维敲击位置2案例3二维敲击位置1案例4二维敲击位置23㊀实验结果分析本小节分别对4个案例进行实验测量,并采用本文所提方法确定AE源位置,对其有效性㊁精确性㊁可靠性进行验证㊂3.1㊀信号分析以案例1为例,图6为AE传感器1㊁传感器2接收到的声信号,相应的VMD分解结果如图7所示㊂㊀㊀㊀㊀㊀第5期童国炜等:声发射检测信号分析及源定位方法研究99㊀㊀图6㊀案例1信号在案例1中,原始信号被分为4个模态函数,在时域波形中,MF的幅值会逐渐减小,同时频带会升高㊂因此,具有较低信号幅值和较高频率的MF分量可以被认为是噪声干扰而忽略不计㊂同时,每个MF的能量EIMFi和相应的能量比RIMF由下式进行量化:EIMFi=1NðNm=1xi(m)2(11)(a)传感器1信号的MF图㊀㊀㊀(b)传感器1信号MF的频域图(c)传感器2信号的MF图㊀㊀㊀(d)传感器2信号MF的频域图图7㊀分解结果RIMF=EIMFiðXi=1EIMFiˑ100%(12)式中xi(m)为第i个MF中第m个时间序列点的数值㊂图8显示了案例1中2个AE传感器接收到声信号MF的能量比㊂如图8所示,前3个MF几乎包含整个信号能量的98%,可以完全反映原始信号的主要信息㊂因此,MF1㊁MF2㊁MF3可用于重建AE信号的主要成分,而其他能量较低的成分可以忽略不计㊂3.2㊀一维定位模型合并2个AE传感器信号前3个MF,由式(3)计算2个信号的互相关系数,并从峰值处获得时间差,通过式(1)计算出声发射源的位置㊂案例1-2的相关系数曲线如图9所示,定位结果列于表3㊂表3㊀一维模型声发射源定位结果案例d1/mmD/mmΔt/ms式(1)结果/mm绝对误差/mm相对误差/%1803400.05182.512.513.132240340-0.088231.418.593.58根据实验结果可知,本文设计的定位算法能够实现AE源的定位,且具有较高的定位精度,在案例1,2的实验中,相对误差可达到3.13%,3.58%,满足实际应用要求㊂3.3㊀二维定位模型基于一维定位模型的计算方法,采用2对AE传感器的数据,通过双曲线方法可实现二维平面内的AE源定位,结果如表4所示(坐标原点在图5的左下角)㊂通过2组二维平面AE源定位实验,可验证本文所提方法对二维平面AE源定位是有效的㊁精确的,实际计算结果的横纵坐标定位误差在5%以内㊂㊀㊀㊀㊀㊀100㊀InstrumentTechniqueandSensorMay.2021㊀(a)传感器1各MF能量比(b)传感器2各MF能量比图8㊀案例1MF能量比(a)案例1相关系数曲线(b)案例2相关系数曲线图9㊀互相关分析曲线表4㊀二维模型声发射源定位结果案例AE传感器位置坐标/mm1号2号3号实际AE源坐标/mm双曲线法计算结果/mm绝对误差/mm相对误差/%3(80,420)(240,460)(420,420)(160,140)(164.4,134.4)(5.4,5.6)(3.3,4.1)4(80,420)(240,460)(420,420)(420,320)(407.4,329.1)(12.6,9.1)(3.1,2.8)4㊀结论为了减小AE源定位过程中测量环境噪声和频散现象对定位结果的干扰,本文研究了VMD方法在AE源定位中的应用方法,通过对原始AE信号按最小带宽进行分解,提取主要能量分量的和,并采用互相关分析确定AE源位置㊂一维和二维AE源定位实验结果表明本文所提方法综合定位误差在5%以内,可实现精确的AE源定位计算,为AE源定位研究提供了一种可行的研究方法㊂参考文献:[1]㊀王清琳,程珩,靳宝全.管网泄漏极性相关法定位研究[J].仪表技术与传感器,2015(7):94-97.[2]㊀BATTIEAG.Acousticemissionprinciplesandinstrumentation[J].JournalofAcousticEmission,1983,2(12):95-128.[3]㊀GEIGERL.Probabilitymethodforthedeterminationofearth⁃quakeepicentersfromarrivaltimeonly[J].Bull.St.Louis.Univ.,1912,8(1):60-71.[4]㊀ZHOUZ,ZHOUJ,CAIX,etal.Acousticemissionsourcelo⁃cationconsideringrefractioninlayeredmediawithcylindricalsurface[J].TransactionsofNonferrousMetalsSo⁃cietyofChina,2020,30(3):789-799.[5]㊀HUQ,DONGL.Acousticemissionsourcelocationandexperi⁃mentalverificationfortwo⁃dimensionalirregularcomplexstruc⁃ture[J].IEEESensorsJournal,2020,20(5):2679-2691.[6]㊀DRAGOMIRETSKIYK,ZOSSOD.Variationalmodedecom⁃position[J].IEEETransactionSignalProcess,2014,62(3):531-544.[7]㊀王少峰,刘朋真,王建国,等.基于小波包熵与Gabor小波变换的管道连续型泄漏源定位[J].仪表技术与传感器,2017(9):98-102.[8]㊀王银玲,李华聪.声发射检测仪多路数据采集模块[J].仪表技术与传感器,2015(6):41-43.作者简介:童国炜(1988 ),工程师,博士,主要从事数值优化㊁逆问题求解㊁人工智能及相关领域问题的模型构建和求解㊂E⁃mail:tongguowei188@163.com通信作者:杨林(1965 ),高级工程师,主要从事检测认证技术研究与管理工作㊂E⁃mail:lynny@ceprei.biz。