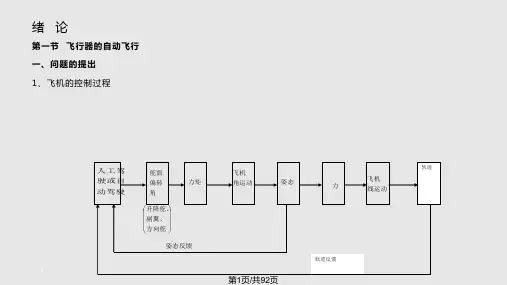
驾驶杆的随动,
了解自动驾驶仪
的工作
驱动
装置
驾驶员
u
飞机
y
自动驾驶仪
yC
c)电传操纵方式
控制器在前向通道,驾驶员通过控制器操纵飞机,
驾驶杆与操纵面之间不再有机械式的联系,而是电
信号传递,所以称为”电传操纵”.
此时,
yC
驾驶杆为
驾驶员
控制器预置
指令信号
例如: 过载nyC ,
控制器
u 驱 动
装置
飞机
y
角速度ZC ,
• 自动驾驶仪是在阻尼器基础上发展而来的.
控制器设计的目标和方法(俯仰为例):
1)抑制长周期模态; 2)构成高度控制器,实现纵向航迹的控制 方式:在阻尼器的基础上,添加外回路反馈俯仰角. 设计的目标,具有小的稳态误差,又有良好的瞬态特性. 为了实现该目标需要增益和动态补偿器.
系统综合的方法:先设计内回路,再设计外回路.
不带自动器---全动平尾
全动平尾
战斗机常用,平尾实现操纵,配平电机和弹簧(千斤顶,screw jack) 承担稳态操纵面载荷,并改变零杆力点,使驾驶员围绕零点操纵.
不带自动器---带助力器
人感系统
驾驶杆力用液压助力器来减小,或完全替代, 操纵面的感觉消失,用人感系统来为驾驶员 提供力的感觉.(人感系统经历了机械,被动,主动)
自动驾驶仪的基本功能
• 稳定模式:飞机自动保持原来的姿态角, 例如:自动驾驶仪输入指令信号分别为
C (t0 ), 能增加长周期阻尼,抑制长周期模态; C 0, C (t0 ), 保持机翼水平,稳定螺旋模态;
•给定变化的航向(或俯仰角),使飞机自动改变航向, 并稳定于该航向.