(骨生物力学课件)人体运动的杠杆原理
- 格式:pptx
- 大小:1.57 MB
- 文档页数:22
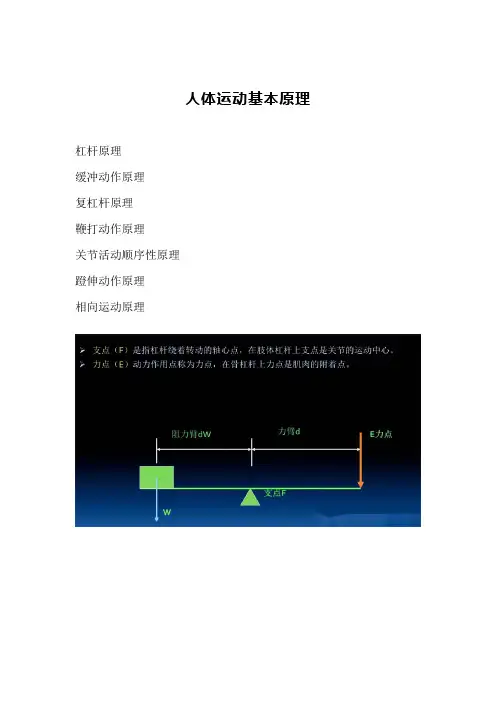
人体运动基本原理杠杆原理缓冲动作原理复杠杆原理鞭打动作原理关节活动顺序性原理蹬伸动作原理相向运动原理2、人体基本运动原理(2)复杠杆原理:当两环节夹角很大时,可分解夹角计算力:书本p129页:当膝关节伸直时θ→0,tanθ→+∞,P为伸力,F为举起上肢的举力(3)关节活动顺序性①由近端至远端,肌肉由强变弱,生理横断面逐个减少②大关节首先产生活动原理。
纵跳时,先动髋关节,再膝关节和踝关节③充分发挥大关节的潜力,有利于动作技术的完成。
跳远的提踵过早,没有充分利用髋关节,跳不远。
双杠倒立时肩带要比腕关节先发力。
④小关节活动是人体支撑点,影响动作时间,可以精确控制方向。
投掷项目要注意小关节发力质量。
(4)具体动作①鞭打动作原理:举例,投球、投掷标枪跑步时,髋关节、肩关节围绕躯干纵轴扭转,消除两环节产生角动量的影响⑥相向运动原理:身体两部分相互靠近或远离举例:跳远时,起跳双上肢上扬,下肢后伸;腾空时,双脚前伸,臂下压。
跨栏时,脚跨步幅度大向前,手向后做大幅度摆臂动作。
3、力量素质训练(1)肌肉力量:力量是速度、耐力、柔韧和灵敏的基础(3)影响肌力的因素:(与骨骼肌生物力学相关)①肌肉体积急性肌肉肥大细胞水肿慢性肌肉肥大肌纤维数目增多,横截面积增大肌肉萎缩伴肌肉固定萎缩②肌肉长度与有效横桥数目、ATP酶释放激素、肌肉初始长度有关③收缩速度向心收缩速度呈线性增加,力量呈非线性下降离心收缩速度呈线性增加,力量呈相应增加④纤维类型快肌纤维:Ⅰα型、Ⅰβ型主要影响收缩速度慢肌纤维:Ⅱ型主要决定抗疲劳能力⑤神经控制脊髓α运动神经元→肌纤维→东西过重→反馈肌梭→脊髓后角感觉神经元→中枢⑥激素a、生长激素影响蛋白合成b、睾酮影响肌纤维生长(4)肌肉力量对运动的影响①增加动作力和速度下蹲→纵跳,是“拉长—缩短”过程②增加动作经济性a、助跑→缓冲→蹬地,弹性势能再利用,减少能量消耗。
b、反向动作做前导,例如:向上跳前下蹲,向前投掷前后摆③对振动负荷和冲击负荷的缓冲(5)肌肉训练。
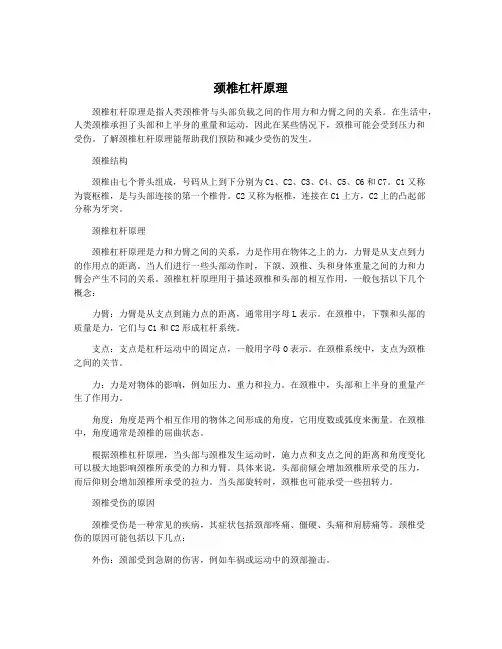
颈椎杠杆原理颈椎杠杆原理是指人类颈椎骨与头部负载之间的作用力和力臂之间的关系。
在生活中,人类颈椎承担了头部和上半身的重量和运动,因此在某些情况下,颈椎可能会受到压力和受伤。
了解颈椎杠杆原理能帮助我们预防和减少受伤的发生。
颈椎结构颈椎由七个骨头组成,号码从上到下分别为C1、C2、C3、C4、C5、C6和C7。
C1又称为寰枢椎,是与头部连接的第一个椎骨。
C2又称为枢椎,连接在C1上方,C2上的凸起部分称为牙突。
颈椎杠杆原理颈椎杠杆原理是力和力臂之间的关系,力是作用在物体之上的力,力臂是从支点到力的作用点的距离。
当人们进行一些头部动作时,下颌、颈椎、头和身体重量之间的力和力臂会产生不同的关系。
颈椎杠杆原理用于描述颈椎和头部的相互作用,一般包括以下几个概念:力臂:力臂是从支点到施力点的距离,通常用字母L表示。
在颈椎中,下颚和头部的质量是力,它们与C1和C2形成杠杆系统。
支点:支点是杠杆运动中的固定点,一般用字母O表示。
在颈椎系统中,支点为颈椎之间的关节。
力:力是对物体的影响,例如压力、重力和拉力。
在颈椎中,头部和上半身的重量产生了作用力。
角度:角度是两个相互作用的物体之间形成的角度,它用度数或弧度来衡量。
在颈椎中,角度通常是颈椎的屈曲状态。
根据颈椎杠杆原理,当头部与颈椎发生运动时,施力点和支点之间的距离和角度变化可以极大地影响颈椎所承受的力和力臂。
具体来说,头部前倾会增加颈椎所承受的压力,而后仰则会增加颈椎所承受的拉力。
当头部旋转时,颈椎也可能承受一些扭转力。
颈椎受伤的原因颈椎受伤是一种常见的疾病,其症状包括颈部疼痛、僵硬、头痛和肩膀痛等。
颈椎受伤的原因可能包括以下几点:外伤:颈部受到急剧的伤害,例如车祸或运动中的颈部撞击。
长期不良姿势:保持同一姿势太久、电子产品使用过度等可导致肌肉疲劳和颈椎损伤。
缺乏锻炼:长期缺乏锻炼或运动不规律,肌肉发达度差,易受损伤。
颈椎杠杆原理的应用颈椎杠杆原理可以帮助我们优化颈部姿势,减少颈椎疼痛和损伤。
肌肉骨骼系统中的力学原理肌肉骨骼系统是人体中起到支撑、运动和保护内脏器官的重要组织系统。
它由骨骼、肌肉、关节和韧带等组成,通过各种复杂的力学原理来实现人体的运动功能。
本文将从力的作用、杠杆原理和运动稳定性等方面来探讨肌肉骨骼系统中的力学原理。
一、力的作用在肌肉骨骼系统中,力是实现人体运动的基本原理。
肌肉通过肌纤维的收缩产生力,将力传递给骨骼。
由于骨骼具有刚性和稳定性,所以它能够承受这些力,并通过骨骼的运动来实现人体的动作。
而关节则充当了力的传递和转移的媒介,它使得骨骼可以在自由度范围内做出各种运动。
二、杠杆原理杠杆原理是肌肉骨骼系统中常见的力学原理之一。
在人体运动中,关节起到了杠杆的作用,它根据运动部位和所需力的大小,形成不同类型的杠杆。
人体关节通常可以分为一级杠杆、二级杠杆和三级杠杆。
一级杠杆指的是力臂和力的方向相同,可以实现力的平衡;二级杠杆指的是力臂比力臂长,可以提供比力的增益;三级杠杆则是力臂比力臂短,提供更大的力矩。
三、运动稳定性肌肉骨骼系统在运动中需要保持稳定性,以便实现精确的动作和避免受伤。
在关节层面,运动稳定性由韧带、肌肉和关节面的结构提供支持。
韧带通过连接骨骼,限制了关节的运动范围,同时提供了关节稳定性。
肌肉通过收缩和伸展来维持关节的稳定性,并在运动过程中提供力量和控制关节的位置。
此外,关节面的形状也会影响运动的稳定性,例如凹面关节可以提供更好的稳定性。
总结:肌肉骨骼系统中的力学原理是实现人体运动的基础,通过力的作用、杠杆原理和运动稳定性等方式来实现各种精确的动作。
在实际运动中,这些力学原理相互作用,共同协调,使得人体能够做出各种复杂的动作和运动。
通过对肌肉骨骼系统中力学原理的研究,可以更好地理解人体运动机制,为运动训练和康复治疗提供科学依据。
3、各向异性和应力强度的方向性:各向异性是指骨在不同方向上的力学性质不同,(多孔结构所致)。
应力强度的方向性表现在骨密质与骨松质刚性的差别和各向异性使骨对应力的反应在不同方向上各不相同。
4、耐冲击力和耐持续力差:骨对冲击力的抵抗和持续受力能力较其它材料差。
抗疲劳性能也差。
5、应力对骨结构的影响:外加机械力改变骨结构中的应力。
而应力通常与骨组织之间存在着一(就象多次弯曲竹杆)、周期性载荷引起的骨折,开始于应力集中点,形成蚌壳式裂纹。
、重复载荷的骨疲劳,引起的骨折往往是低载荷的情况。
(四)影响骨疲劳的因素和疲劳曲线:骨骼上的应力,起到保护骨骼的作用。
(二)体育锻炼可促进骨的形态结构发生变化,提高骨抵抗载荷的能力。
第三节关节软骨、韧带、肌腱的生物力学特性和人体关节力学(课下自学)作业:自学P37--51第三节关节软骨、韧带、肌腱的生物力学特性和人体关节力学并回答问题。
1、简述关节软骨的力学性质,并分析关节软骨在关节活动中的作用。
:指肌肉工作时并联弹性成分的张力。
:被动张力与主动张力之和。
Ft = Fc + Fp(四)肌肉的平衡长度:无任何负荷时肌肉的长度— 。
在人体内的肌肉长度总是稍许大于平衡长度,所以放松的肌肉也保(也称最适长度):指肌肉收缩成分产生最大收时,收缩成分的张力最大。
时,肌肉能恢复原长。
i=2.5 时,肌肉收缩力三、肌肉长度与肌肉收缩力量的关系—指肌肉收缩前的初长度对肌肉收缩(三)肌肉长度—总张力的关系(Ft— i曲线,P55图2-32)Ft = Fc + Fp分析:1、 i≤ 时,若肌肉收缩,Ft = Fc(此时Fp = 0)2、 i= o时,Fc = Fc max,则Ft =Fc max + Fp3、 i> o时,Fc减小,Ft一般减小。
Δ = 时为缓冲和超越器械(二)肌肉离心收缩力—速度的关系:(P60图2-37)随着肌肉被拉长速度的增加,肌力也增加,F∝V“切断”粗细肌丝连合所需的力要比保持等长收缩的力更大。
骨杠杆原理的应用方法1. 什么是骨杠杆原理骨杠杆原理是物理学中的一个基本原理,用来描述在杠杆系统中力的平衡和力的传递。
在生物学中,骨骼和肌肉系统也遵循着骨杠杆原理,这被广泛应用于人类运动和工程设计中。
2. 骨杠杆原理的应用方法2.1. 人体运动中的应用•步行和跑步:通过与地面接触的脚作为杠杆的支点,肌肉通过骨骼产生力,使身体向前推进。
•腿部训练:通过骨骼和肌肉的杠杆作用,可以进行蹲起、坐下等运动,增强腿部力量和稳定性。
•手臂力量训练:通过举重、俯卧撑等动作,利用杠杆原理增强手臂的力量和稳定性。
•重量训练:通过杠铃、哑铃等重物来进行重量训练,通过骨杠杆原理来分配力量和负荷。
2.2. 工程设计中的应用•起重机:起重机通过杠杆原理来提升重物,利用杠杆的平衡原理可以达到较大的起重量。
•制动系统:车辆的刹车系统中,通过骨杠杆原理来放大踩踏式制动器的力,从而实现较快的制动效果。
•门窗设计:门窗的开关设计中,通过杠杆的原理可以减小开关的力度,方便人们的使用。
•桥梁设计:桥梁的设计中,通过骨杠杆原理来分散载荷,使得桥梁能够承受较大的重量。
2.3. 医疗领域中的应用•外科手术:在骨折修复和关节置换手术中,医生利用杠杆原理将骨折或疾病患者的骨骼恢复到正常位置。
•助动器具设计:轮椅、拐杖等辅助工具的设计中,通过骨杠杆原理来减轻行动不便者的负担。
•假肢设计:假肢的设计中,通过骨杠杆原理来帮助残疾人恢复正常的运动能力。
3. 骨杠杆原理的优势•使用简单:骨杠杆原理是一种基本的物理原理,应用广泛,所需设备和材料相对简单。
•力量放大:通过杠杆的作用,可以将较小的力转化为较大的力,提高工作效率。
•节约能源:骨杠杆原理可以将能量转换为力的放大,从而减小人力和能源的消耗。
•稳定性增强:杠杆的设计可以使得力的传递更加稳定,减小应力集中,提高物体的稳定性。
4. 骨杠杆原理的实际应用案例•汽车摇臂:通过骨杠杆原理,减小了发动机的震动和噪音,并提高了发动机的运行效率。
人体生物力学老筋非常感谢garden608版主的鼓励,再接再励转载一篇相关文章在人体中,骨在肌拉力作用下围绕关节轴转动,它的作用和杠杆相同,称为骨杠杆。
人体的骨杠杆运动有三种形式:1.平衡杠杆:支点在力点和重点之间。
如颅进行的仰头和俯首运动。
2.省力杠杆:重点在支点和力点之间。
如行走时提起足跟的动作,这种杠杆可以克服较大的体重。
3.速度杠杆:力点在重点和支点之间。
如肘关节的活动,这种活动必须以较大的力量才能克服较小的重量,但运动速度和范围很大。
人体主要的骨骼肌(1)头肌头肌可分为面肌和咀嚼肌二部分。
面肌分布于头面部皮下。
位于眼裂、口裂周围,有环形的轮匝肌和放射形安排的肌肉,可使眼裂、口裂张开或关闭,能示喜、怒、哀、乐各种表情。
咀嚼肌是作用下颌关节的肌肉,如颞肌和咬肌。
能有力的上提下颔骨。
(2)四肢肌①上肢肌上肢肌可分为肩肌、臂肌,前臂肌和手肌四部。
肩部肌肉可使肩关节运动,如三角肌,它从前、后、外三方包绕肩关节;构成圆隆的肩部,作用主要是使臂外展。
臂肌分前、后两群。
在上臂前方跨过肩关节和肘关节的屈肌,如肱二头肌,是强有力的屈肘肌肉。
在肱骨后方的肱三头肌为伸肘肌肉。
前臂肌也分前、后两群。
前臂肌数目多且大多是长肌,这些肌肉分别跨越肘、腕、掌、指各部。
肌肉位于前臂,于腕部形成腱。
前肌群位于尺、桡骨前面,主要有屈腕、屈指和使前臂旋前的肌肉。
后肌群位于尺、桡骨后面,主要有伸腕、伸指和使前臂旋后的肌肉。
手肌除有从前臂来的长肌腱外,还有很多短小的手肌均集中在手的掌侧,可分外侧、中间和内侧三肌群。
外侧肌群在拇指根部形成一隆起称鱼际肌,能使拇指作屈、收、展和对掌等动作。
中间肌群位于前臂来的屈指肌腱的深面,主要有骨间肌,收缩时能使各指向中指靠拢或分开。
外侧肌群称小鱼际,能使小指作屈、外展和对掌等作用。
②下肢肌下肢肌可分为髋肌、大腿肌、小腿肌和足肌。
髋肌主要起始于骨盆的内面和外面,跨越髋关节,止于股骨上部。
位于盆内的腰大肌是屈大腿肌、位于骨盆后外面的臂大肌是后伸大腿肌。