人体力学的三类杠杆
- 格式:doc
- 大小:23.00 KB
- 文档页数:1
人体骨杠杆的分类及其在康复过程的原理应用
人体骨杠杆可分为三类:
①平衡杠杆:关节中心位于肌肉的动力点与运动环节的阻力点之间。
②省力杠杆:运动环节的阻力点在关节中心与肌肉的动力点之间。
③速度杠杆:肌肉的动力点在关节中心与运动环节的阻力点之间。
杠杆原理应用:
①利用杠杆原理省力:增大动力臂和缩短阻力臂。
例如,通过某些骨性结构增大肌肉力臂;提起重物时,让重物越靠近身体,缩短阻力臂,就越省力。
一②利用杠杆原理获得速度:缩短力臂和增大阻力臂。
例如,身体上肌肉起、止点一般靠近关节中心,即力臂较短。
③利用杠杆原理发展肌肉力量:增加阻力和延长阻力臂。
例如,增加阻力负荷;仰卧举腿时,直腿延长阻力臂来发展肌肉力量。
人体力学与护理操作一、人体力学是运用力学原理研究维持和掌握身体的平衡,以及身体从一种姿势变成另一种姿势时身体如何有效协调的一门科学。
二、常用力学原理杠杆作用摩擦力平衡与稳定(一)杠杆原理杠杆作用:是指在外力作用下使杠杆绕一固定点(支点)转动。
人体活动主要是由骨骼、关节和肌肉,在神经和其它系统的配合下共同完成的。
骨骼起着杠杆的作用,关节是运动的枢纽,肌肉是运动的动力。
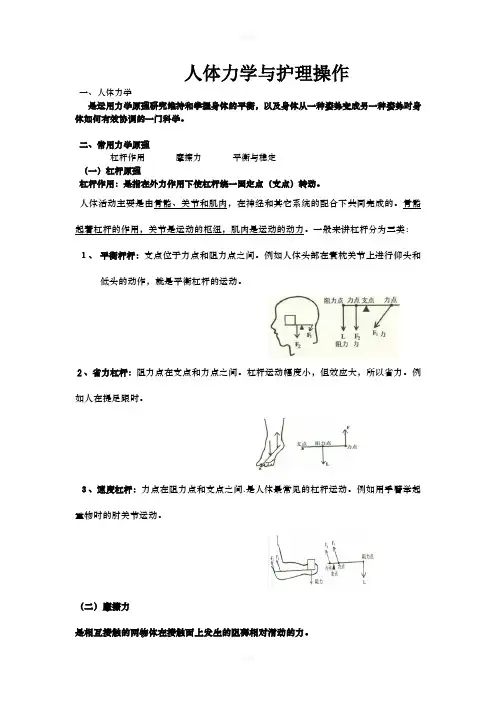
一般来讲杠杆分为三类:1、平衡杆杆:支点位于力点和阻力点之间。
例如人体头部在寰枕关节上进行仰头和低头的动作,就是平衡杠杆的运动。
2、省力杠杆:阻力点在支点和力点之间。
杠杆运动幅度小,但效应大,所以省力。
例如人在提足跟时。
3、速度杠杆:力点在阻力点和支点之间.是人体最常见的杠杆运动。
例如用手臂举起重物时的肘关节运动。
(二)摩擦力是相互接触的两物体在接触面上发生的阻碍相对滑动的力。
摩擦力的方向与运动力的方向相反摩擦力的大小与该力相同,并随力的增大而增加(三)平衡的原理平衡的原理中,有几个重要的概念:重心、重力线和支撑面(1)重心:是重量的中心。
人体重心的位置随着四肢和躯干的姿势而改变,当人直立时,重心在骨盆的骶骨上部靠前方。
(2)重力线:是一条假象的通过重心的垂直线。
(是自重心垂直于地面的线)(3)支撑面:指人或物体与地面的接触面积。
(支持重力的面积)*平衡的基本原理是:重心低,支撑面大,重力线在支撑面以内时物体的稳定度大。
*平衡与稳定1、物体的重量与稳定度成正比2、支撑面的大小与稳定度成正比3、物体重心高度与稳定度成反比4、重力线必须通过支撑面,才能保持人或物的稳定。
**物体重心的高度与稳定成反比人体重心的位置随着躯干和四肢姿势的改变而改变当人垂直双臂直立时,重心位于骨盆的第二骶椎前约7cm处如把手臂举过头顶,重心随之升高当身体下蹲时,重心则下降甚至吸气时膈肌下降,重心也会下降**支撑面的大小与稳定度成正比▪支撑面是人或物体与地面接触时的各支点的表面构成的,并且包括各支点之间的表面积,可以为站立、提重或移动时提供稳定性。
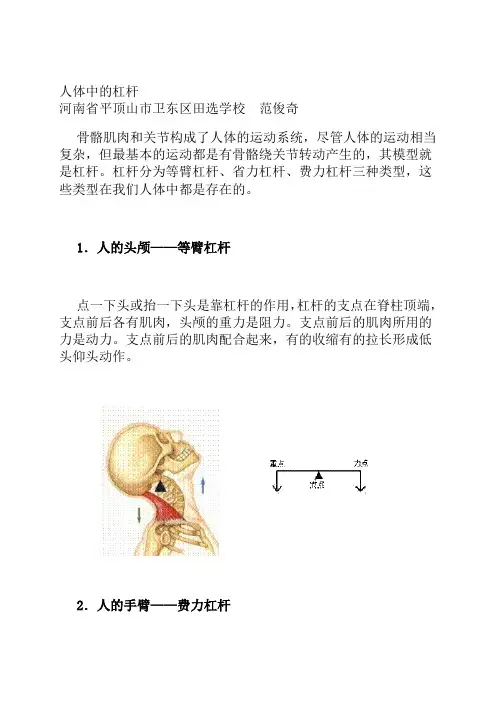
人体中的杠杆河南省平顶山市卫东区田选学校范俊奇骨骼肌肉和关节构成了人体的运动系统,尽管人体的运动相当复杂,但最基本的运动都是有骨骼绕关节转动产生的,其模型就是杠杆。
杠杆分为等臂杠杆、省力杠杆、费力杠杆三种类型,这些类型在我们人体中都是存在的。
1.人的头颅——等臂杠杆点一下头或抬一下头是靠杠杆的作用,杠杆的支点在脊柱顶端,支点前后各有肌肉,头颅的重力是阻力。
支点前后的肌肉所用的力是动力。
支点前后的肌肉配合起来,有的收缩有的拉长形成低头仰头动作。
2.人的手臂——费力杠杆人的手臂绕肘关节转动,可以看成是由肌肉和手臂骨骼组成的杠杆在转动。
肘关节是支点,肱二头肌肉所用的力是动力,手拿的重物的重力是阻力,显然我们的前臂是一种费力杠杆,举起一个重物,肌肉要化费约6倍以上的力气。
虽然费力,但是可以省距离(少移动距离),提高工作效率。
3.走路时的脚——省力杠杆我们走路抬起脚时,脚就是一个杠杆。
脚掌根是支点,人体的重力就是阻力,腿肚肌肉产生的拉力就是动力。
杠杆模型如图所示。
这种杠杆可以克服较大的体重。
除上述三个部位之外,在身体中还有多处杠杆。
如:小腿绕膝盖的转动可看成小腿肌肉和胫骨组成的杠杆;弯腰时,腰部肌肉和脊骨之间形成杠杆;奔跑时,向前跨步,右腿的髂腰肌收缩、臀大肌松弛,使右大腿抬起;股四头肌松弛,股二头肌收缩,使右膝弯曲。
仰卧起坐时,上身受到腹肌和上身重力的作用。
这些杠杆模型怎样?是哪种类型的杠杆?请同学们相互讨论,并请教老师。
人体中的杠杆作者:潘艳艳文章来源:收集整理点击数:5381 更新时间:2009-5-11人身上有206块骨,其中有许多起着杠杆作用,当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉,肌肉靠坚韧的肌健附着在骨上。
例如肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(如图),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上。
人前臂的动作最容易看清是个杠杆了,它的支点在肘关节。

物理人体中的杠杆原理
物理学中的杠杆原理是指在平衡力的作用下,杠杆可以通过改变力的作用点、方向或大小的方式改变物体的平衡状态。
在人体中,杠杆原理可以应用于骨骼系统中的关节和肌肉。
关节可以看作是杠杆的支点,肌肉则是杠杆的力臂。
当肌肉收缩时,产生的力可以通过关节传递到骨骼上,实现身体的运动。
例如,当人体需要举起一个重物时,肌肉产生的力可以通过杠杆原理转化为提升重物的力。
在这个过程中,肌肉作为力的源头,在关节处产生力,通过杠杆的原理将力传递给骨骼,从而使身体能够举起重物。
杠杆原理还可以解释人体的平衡。
当人体需要保持平衡时,杠杆原理可以帮助调节力的平衡点和大小,从而保持身体的稳定。
例如,站立时,身体的重量通过杠杆原理分散到双脚的接触面上,以保持身体的平衡。
总的来说,杠杆原理在人体中的应用通过骨骼和肌肉系统的协调作用,使人体能够实现运动和保持平衡。
长沙人体骨杠杆分类模型
在人体解剖学中,骨骼系统是支撑和保护身体的基础结构。
骨骼系统由骨骼、关节和韧带组成,通过肌肉和骨骼之间的协调运动,使人体得以运动和保持姿势。
而在骨骼系统中,骨杠杆是起到支撑和传递力量的重要结构之一。
长沙人体骨杠杆分类模型便是对人体骨杠杆的分类和研究。
人体骨杠杆主要分为三类:一类是长杠杆,一类是短杠杆,还有一类是不规则杠杆。
长杠杆指的是骨头两端的距离明显长于作用力与支点之间的距离,比如人体的上臂骨就是一个典型的长杠杆。
而短杠杆则是指作用力与支点之间的距离明显短于骨头两端的距离,例如人体的腿部骨骼。
不规则杠杆则是指既不符合长杠杆条件也不符合短杠杆条件,例如人体的脊椎骨。
长沙人体骨杠杆分类模型的研究对于了解人体骨骼结构和功能具有重要意义。
通过对不同类型骨杠杆的分类和研究,可以更好地理解人体运动的原理和机制。
比如在解剖学和生理学课程中,学生可以通过学习骨杠杆分类模型,更好地理解人体骨骼系统的结构和功能,为日后的临床实践打下坚实基础。
除此之外,长沙人体骨杠杆分类模型还对于运动医学和康复医学领域有着重要的应用。
通过对不同类型骨杠杆的分类和研究,可以帮助医生和康复治疗师更好地设计运动方案和康复方案,从而提高治
疗效果和减少运动损伤的发生。
总的来说,长沙人体骨杠杆分类模型是一个重要的研究领域,对于促进人体解剖学、生理学、运动医学和康复医学的发展具有积极的意义。
通过对不同类型骨杠杆的分类和研究,可以更好地了解人体骨骼系统的结构和功能,为人类健康和运动提供更科学的指导。
希望未来能够有更多的研究和应用将长沙人体骨杠杆分类模型发展得更加完善和深入。

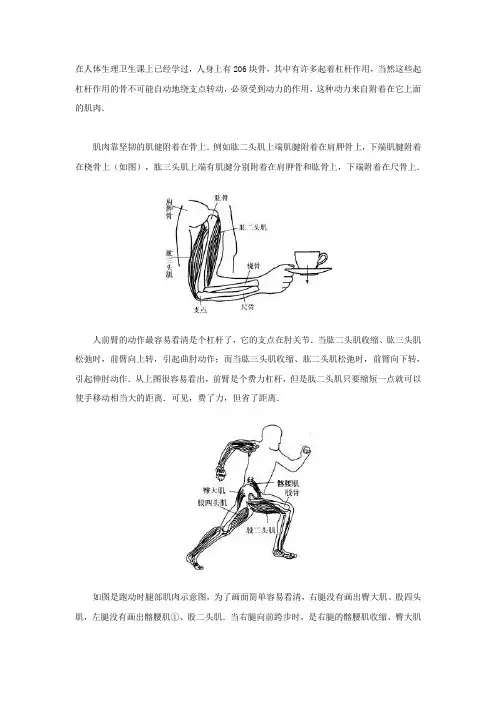
在人体生理卫生课上已经学过,人身上有206块骨,其中有许多起着杠杆作用,当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉.
肌肉靠坚韧的肌健附着在骨上.例如肱二头肌上端肌腱附着在肩胛骨上,下端肌腱附着在桡骨上(如图),肱三头肌上端有肌腱分别附着在肩胛骨和肱骨上,下端附着在尺骨上.
人前臂的动作最容易看清是个杠杆了,它的支点在肘关节.当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作.从上图很容易看出,前臂是个费力杠杆,但是肽二头肌只要缩短一点就可以使手移动相当大的距离.可见,费了力,但省了距离.
如图是跑动时腿部肌肉示意图,为了画面简单容易看清,右腿没有画出臀大肌、股四头肌,左腿没有画出髂腰肌①、股二头肌.当右腿向前跨步时,是右腿的髂腰肌收缩、臀大肌
松弛,使右大腿抬起;股四头肌松弛,股二头肌收缩,使右膝弯曲.这时候,左腿由于它的髂腰肌松弛,臀大肌收缩,股四头肌收缩,股二头肌松弛,而伸直.
在人体中,骨在肌拉力作用下围绕关节轴转动,它的作用和杠杆相同,称为骨杠杆。
人体的骨杠杆运动有三种形式:
1.平衡杠杆:支点在力的作用点和重力作用点之间。
如颅进行的仰头和俯首运动。
2.省力杠杆:重力作用点在支点和力的作用点之间。
如行走时提起足跟的动作,这种杠杆可以克服较大的体重。
3.速度杠杆:力的作用点在重力作用点和支点之间。
如肘关节的活动,这种活动必须以较大的力才能克服较小的重力,但运动速度和范围很大。

第五章人体力学在护理学中的应用第一节人体力学与护理在护理实践中,合理运用力学原理,保持正确的姿势,有助于提高工作效率,减轻身体疲劳,避免因不正确的姿势引起肌肉、肌腱劳损,常见的有腰肌扭伤等.一、常用力学原理(一)杠杆作用杠杆有以下三种基本形式:1.平衡杠杆:支点位于力点与阻力点之间的杠杆。
2.省力杠杆:阻力点在支点与力点之间。
3.速度杠杆:力点位于阻力点与支点之间。
速度杠杆是人体最常见的杠杆运动。
(二)平衡与稳定根据力学原理,物体的平衡和稳定与重力的大小、重心的位置及重力线与支撑面的关系有关。
重力:是地球作用于物体的万有引力。
重心:是重力的中心。
重力线:即重力的作用线,是一条假想的通过重心的垂线。
支撑面:是物体与地面间的接触面。
一般而言,物体的重量、支撑面的大小与稳定度成正比;物体重心的高低与稳定度成反比。
另外,重力线落在支撑面内有助于维持物体的平衡与稳定.。
(三)压力与摩擦力压力指受力面积上所承受的垂直作用力。
对于相同重量的物体而言,受力面积越大,则单位面积所承受的压力越小。
摩擦力是一个物体在另一个物体表面作相对运动或有相对运动趋势时产生的反作用力。
二、人体力学在护理实践中的应用在护理实践中正确运用力学原理,不仅可避免护士自身受损伤,提高工作效率,还有助于增进病人的舒适与安全。
(一)合理利用杠杆原理运用人体的自然杠杆作用,护士可以用较小的力量来完成相同的工作。
(二)采取正确的姿势,保持身体的平衡1.正确的站立姿势2.维持较大的支撑面人体的支撑面为两脚之间的距离,支撑面越大,稳定性越大。
所以,护士在进行护理操作时,应两脚前后或左右分开,以扩大支撑面,利于保持身体的平衡。
3.维持较低的重心重心越低,稳定性越大。
所以对于工作平面较低的技术操作,如护士铺床时,应两脚前后或左右分开,屈髋屈膝,降低重心,增加稳定性。
4.尽可能让重力线通过支撑面所以护士在做翻身、擦浴、注射等护理操作时,应尽量将病人的身体靠近护士,同时以下蹲代替弯腰工作,减少重力线偏移,有助于增加护士的稳定性,减少腰部肌肉作功。
精品资源
人体内的杠杆
运动系统是许多个杠杆结构组成的,人体的许多动作都是通过杠杆作用而表现出来的。
在运动过程中,骨为运动的杠杆,关节为运动的支点,骨骼肌施加动力。
当骨骼肌收缩时,牵动所附的骨围绕关节转动,就会产生各种动作。
人体内有三种类型杠杆,即等臂杠杆、省力杠杆和费力杠杆。
下图示仰头、跷足、屈肘分别代表的三种杠杆,你能判断出各属哪一种吗?
图中O表示关节构成的支点,三图分别表示寰枕关节、跖趾关节和肘关节。
A点为肌肉在骨上的附着点,即力点,B则表示重点,由此可知,仰头为等臂杠杆,跷足为省力杠杆,而屈肘则为费力杠杆。
在屈肘动作中,如果OB是OA的8倍,假如你要用手托起8千克的铁球,请你算算看,肱二头肌至少要施加多大的力?(答:627.2牛顿)
欢下载。
人体中的杠杆
一个成年人,他的骨骼一共有206块,占他本人体重的20%。
再具体地说,按部位可分为躯干骨51块,颅骨29块(包括听小骨6块,就是耳朵里面的小骨头),上肢骨64块,下肢骨62块。
每一块骨都是一个器官,由骨细胞、胶原纤维和骨基质构成,外被以骨膜和软骨,里面有骨髓。
骨骼的功能非常多,骨骼骨折以后可以修复愈合,有造血和储备钙与磷的作用。
除了支持人体直立行走外,还能起到保护内脏组织和杠杆的作用。
当然这些起杠杆作用的骨不可能自动地绕支点转动,必须受到动力的作用,这种动力来自附着在它上面的肌肉。
人前臂的动作最容易看清是个杠杆了,它的支点在肘关节。
当肱二头肌收缩、肱三头肌松弛时,前臂向上转,引起曲肘动作;而当肱三头肌收缩、肱二头肌松弛时,前臂向下转,引起伸肘动作。
前臂是个费力杠杆,但是肽二头肌只要缩短一点就可以使手移动相当大的距离。
可见,费了力,但省了距离。
如图:
在人体中,骨在肌拉力作用下围绕关节轴转动,它的作用和杠杆相同,称为骨杠杆。
人体的骨杠杆运动有三种形式:
1.平衡杠杆:支点在力的作用点和重力作用点之间。
如颅进行的仰头和俯首运动。
2.省力杠杆:重力作用点在支点和力的作用点之间。
如行走时提起足跟的动作,这种杠杆可以克服较大的体重。
3.速度杠杆:力的作用点在重力作用点和支点之间。
如肘关节的活动,这种活动必须以较大的力才能克服较小的重力,但运动速度和范围很大。
池州人体骨杠杆分类模型
池州人体骨杠杆分类模型
近年来,随着人们对健康意识的增强和医学科技的发展,对人体健康
的关注也越来越高。
池州作为一个历史悠久、文化灿烂的城市,其医
学科技也在不断发展。
其中,人体骨杠杆分类模型是一项非常重要的
研究内容。
通过研究人体骨杠杆分类模型,可以更好地了解人体骨骼系统的结构
和功能,为相关的医疗诊断和治疗提供依据。
下面是具体的分类模型:
一、按杠杆类型分类
1. 一级杠杆:是指杠杆的重心在一端,力臂在另一端的杠杆。
例如,
人体的头颈部就是一级杠杆,当头部向下俯垂时,颈椎会受到挤压。
2. 二级杠杆:是指杠杆的重心在中间,有两个力臂的杠杆,如人体的
腕关节和踝关节等。
例如,当人们弯曲手腕时,肘部和手部的力臂会
形成一个夹角,使手部产生力量。
3. 三级杠杆:是指杠杆的重心在一端,有两个力臂的杠杆。
例如,人
体的肌肉和骨骼之间就是三级杠杆作用。
当肌肉表现出强大的力量时,
可能会导致相应骨头部位产生弯曲或折断。
二、按应力分布分类
1. 均匀应力型:是指应力呈均匀分布的类型,如人体的肋骨和头骨等。
此类应力分布比较均匀,骨骼系统较为稳定。
2. 非均匀应力型:是指应力呈不均匀分布的类型,如人体的手腕和脊
椎等。
这种类型的应力分布比较复杂,容易受到外界因素的影响,因
此需要加倍注意。
以上就是池州人体骨杠杆分类模型的相关内容,请关注我们的医学科
技发展,探索更多的健康之道。
人体力学的三类杠杆
人体力学的三类杠杆包括:
1. 平衡杠杆:这种杠杆在关节中操作,当关节活动时,刺激并产生力量。
例如,当你站立时,双脚与地面接触的点是固定点,头部作为杠杆的枢轴,进行活动。
这种情况下,如果你向左右两侧倾斜,就运用了平衡杠杆。
2. 移动杠杆:这是通过骨骼(例如手臂或腿部)的一个或多个部分作为支点,来产生运动。
例如,当你握住一个哑铃并向前移动时,肩膀就是支点,而各部分骨骼之间的运动就形成了移动杠杆。
3. 转动杠杆:在肌肉收缩时,它也起到支点的作用。
肌肉收缩产生的力量作用于骨关节上,产生转动动作。
例如,当你旋转门把手时,门把手就是支点,手臂的肌肉收缩使骨头围绕这个支点转动。
以上内容仅供参考,建议到相关网站查询或咨询专业人士。