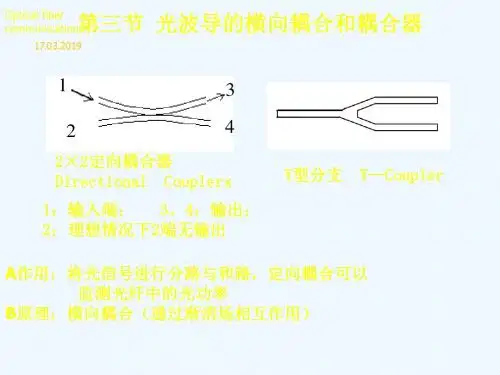
(集成光电子学导论)第三章光波导耦合器
- 格式:ppt
- 大小:3.18 MB
- 文档页数:44

(150007)),赵灿//制造技术与机床.―2007,(2).―7175介绍了目前基于三维光栅扫描测量标定技术的国内外发展状况,提出自由置位固定编码多目标跟踪提取连续图像轮廓的全自动标定技术,给出了此技术的具体算法实现。
利用提出的全自动标定技术,得出了相应的实验结果,并将该实验结果与利用通用的M AR R 算法得到的结果对标定精度进行了比较、分析。
结果表明,所提出的全自动标定技术使操作更加便捷,能很好地保证标定图像轮廓边缘的定位精度,使整个系统的标定精度保持在0.005~0.02mm 范围内。
图6表2参11(于晓光)TP3912007043503点阵式测头成像视觉三坐标测量系统建模=M odeling vi sion 3D coordinate measur ing system with a special probe[刊,中]/张雪飞(天津大学精密测试技术与仪器国家重点实验室.天津(300072)),彭凯//制造技术与机床.―2007,(3).―103105在透视投影和坐标变换的基础上,建立测头成像视觉三坐标测量系统的数学模型。
求解了共线、共面和空间三种点阵式测头构成的系统模型,以最简单的共线3点型点阵测头为例建立实测视觉坐标测量系统,实验结果证明了系统模型的正确性。
图4参3(于晓光)TP391TB922007043504基于机器视觉的二维小尺寸精密测量系统=Two dimensional pr ecision measurement systems based on machine vi sion[刊,中]/罗钧(重庆大学光电技术及系统国家教育部重点实验室.重庆(400030)),黄俊//计算机测量与控制.―2007,15(1).―1113设计了一种对万能工具显微镜进行改造而成的二维精密测量系统。
该系统引入了机器视觉技术进行自动测量对准,采用光栅传感器提供坐标系以检测尺寸,测量系统测量范围为25mm !25mm,测量精度可达5m 。

简明光波导模式理论光波导模式理论是光学领域中的重要理论之一,它主要研究光在波导结构中的传播模式和特性。
在本文中,我们将简要介绍光波导模式理论的基本概念、原理、种类和特点,以及在光电子学、光通信等领域的应用,并分析其优缺点及改进方向。
1、光波导模式理论的基本概念和原理光波导模式理论主要研究光在波导结构中的传播模式和特性。
波导结构是指能够约束和引导光波传播的介质层或光纤。
根据麦克斯韦方程组和波动光学理论,光波导模式理论可描述为在波导结构中传播的光波的电磁场分布和传播常数之间的关系。
在光波导中,光波的电磁场分布在横向和纵向两个方向上,因此光波导模式理论包括横向模态和纵向模态。
横向模态是指光波在波导结构横截面上的场分布,它包括多种模式,如基模、高阶模、辐射模等。
纵向模态是指光波在波导结构长度方向上的场分布,它描述了光波的传播行为,包括相速度、群速度、衰减等参数。
2、光波导模式的种类和特点根据光波在波导结构中的传播特性和横向模态,光波导模式可分为多种类型。
其中,常见的类型包括:(1)基模(Fundamental Mode):基模是波导结构中最基本的横向模态,它的场分布具有对称性,并且在横向方向上具有最小的光强分布。
基模的传播常数较小,具有最小的衰减系数。
(2)高阶模(Higher-order Mode):高阶模是波导结构中除基模以外的其他模态,它的场分布具有非对称性,并且在横向方向上具有较大的光强分布。
高阶模的传播常数较大,具有较大的衰减系数。
(3)辐射模(Radiation Mode):辐射模是波导结构中不限制光波传播的模态,它的场分布不受波导结构的限制,并且可以向外部辐射能量。
辐射模的传播常数最小,衰减系数也最小。
3、光波导模式在光电子学、光通信等领域的应用光波导模式理论在光电子学、光通信等领域具有广泛的应用价值。
例如,在光电子器件方面,光波导模式理论可用于分析器件的性能和使用条件。
在光纤通信方面,光波导模式理论可用于研究光的传输和信号处理。
光波导原理与器件 pdf1 光波导原理与器件概述光波导器件是指使用光波导技术制作的光学器件,其中的光波导是指利用材料中的反射率差,将光线引导至其它位置的一种光学引导结构。
通过这种方式,可以对光的传输进行有效的控制,因此光波导器件在光通信、光计算、光储存等领域有广泛应用。
2 光波导原理2.1 光波导的基本特点光波导是利用介质的光学性质来引导光线传输的结构。
光波导具有以下基本特点:- 包含一定的光波导结构,可以固定或调整光的位置和方向。
- 光波导结构必须能够比周围介质具备较高的折射率。
- 光的传输速度决定了光波导的尺寸,因此其相对于微观器件较大。
2.2 光波导的工作原理光波导的工作原理基于光的反射和折射原理。
当光线遇到介质表面的变化时,存在反射、折射和透射三种情况。
其中反射光在界面内传播,而折射光从界面上进入另一种介质中传播。
在光波导器件中,折射率高的材料被用作光波导,通常是通过将光束引导至介质的边界或者将光波导区域中的介质密度改变,使得光光束被抑制在其中,并且可以沿着这些通路传播。
3 光波导器件3.1 基于硅的光波导器件基于硅的光波导器件是最常用的光波导器件之一,主要应用于光电子集成电路和光纤通信中。
此类器件通高度制备工艺的要求,但其表现出的稳定性、实用性和成本优势得到了充分的认可。
该光波导器件的工作原理是将光束通过集成光波导引导到芯片上,同时光波导上的金属导线和其他器件可以与其相互作用,使得光子在电信号控制下具备更高的能量,可以实际应用。
这种器件被广泛用于光速转换、光遗传学、激光雷达、安全监控等领域。
3.2 其他光波导器件除了基于硅的光波导器件外,还有许多其他类型的光波导器件,例如光导纤芯、有机光波导器件等。
光导纤芯是另外一种基于光波导原理制作的光学器件,其结构类似于光纤,但其光导芯中注入高折射率材料,使得光波可以在其中定向和转移。
这种器件由于可以弯曲和弯曲裂缝,因此被广泛应用于光学传感、光纤通信和微模工艺制造等方面。