机械原理 第十三章工业机器人机构及其设计
- 格式:ppt
- 大小:1.67 MB
- 文档页数:11

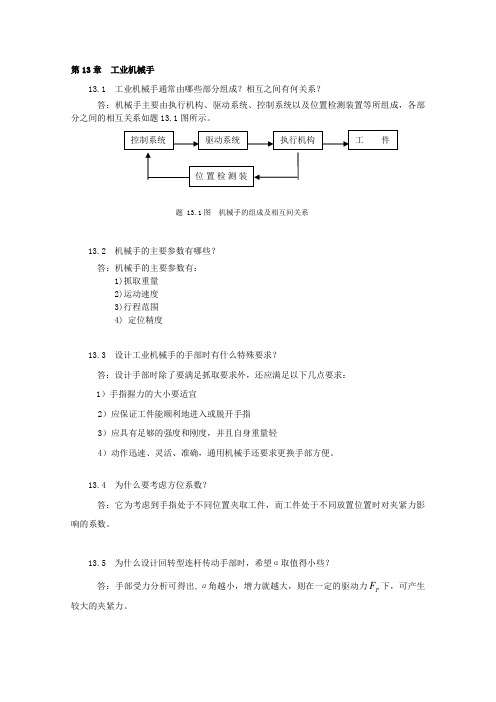
第13章 工业机械手13.1 工业机械手通常由哪些部分组成?相互之间有何关系?答:机械手主要由执行机构、驱动系统、控制系统以及位置检测装置等所组成,各部分之间的相互关系如题13.1图所示。
题 13.1图 机械手的组成及相互间关系13.2 机械手的主要参数有哪些?答:机械手的主要参数有:1)抓取重量2)运动速度3)行程范围4) 定位精度13.3 设计工业机械手的手部时有什么特殊要求?答:设计手部时除了要满足抓取要求外,还应满足以下几点要求:1)手指握力的大小要适宜2)应保证工件能顺利地进入或脱开手指3)应具有足够的强度和刚度,并且自身重量轻4)动作迅速、灵活、准确,通用机械手还要求更换手部方便。
13.4 为什么要考虑方位系数?答:它为考虑到手指处于不同位置夹取工件,而工件处于不同放置位置时对夹紧力影响的系数。
13.5 为什么设计回转型连杆传动手部时,希望α取值得小些?答:手部受力分析可得出,α角越小,增力就越大,则在一定的驱动力P F 下,可产生较大的夹紧力。
13.6 驱动手腕回转时的驱动力矩必须克服哪些阻力矩?答:驱动手腕回转时的驱动力矩必须克服驱动手腕机构时的阻力矩,即为手腕起动时所产生的惯性力矩、摩擦阻力矩以及由于转动件的重心与转动轴线不重合所产生的偏置力矩等。
13.7 手臂可实现的运动及设计要求各有哪些?答:手臂一般能够完成伸缩运动、左右回转、升降或上下摆动(即俯仰)运动,其运动形式有直线运动、回转运动以及二者的复合运动。
设计要求有:1.手臂应承载能力大、刚性好、重量轻。
2.手臂的运动速度要适当,惯性要小。
3.具有导向装置。
4.手臂悬伸的偏重力矩要小。
以上这几点有时往往是相互矛盾的,必须综合考虑,全面权衡。
13.8 实现手臂直线运动常用哪些机构?实现手臂回转运动常用哪些机构?答:常用的实现手臂直线运动的机构有活塞油(气)缸、活塞缸和齿轮齿条机构、丝杠螺母机构以及活塞缸和连杆机构等。
常用的实现回转运动的机构有叶片式回转缸、连杆机构、齿轮传动和链轮传动机构等。
模具设计指南 10/20/18 page 1of 15 第十三章 机构设计 13.1常用行位机构类型 对有侧向分型、抽芯的机构统称行位机构。行位机构类型较多,分类方法多种多样。根据各类行位结构的使用特点,常用行位机构可以概括为以下几类:
(1)前模行位机构 (2)后模行位机构 (3)内行位机构 (4)哈呋模机构 (5)斜顶、摆杆机构 (6)液压(气压)行位机构 13.2行位设计要求
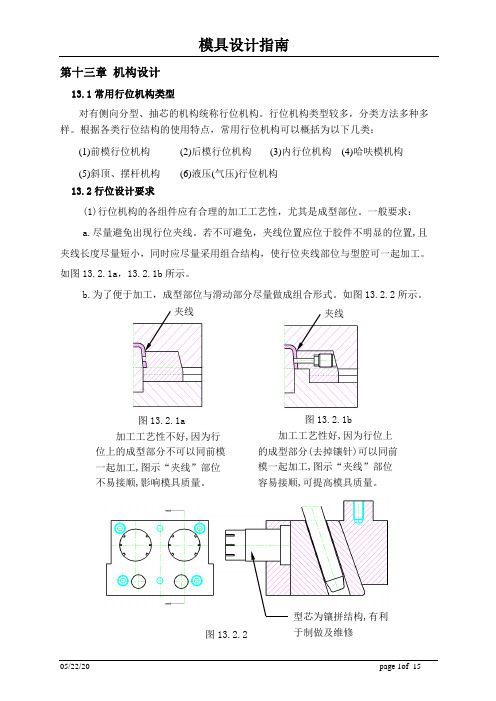
(1)行位机构的各组件应有合理的加工工艺性,尤其是成型部位。一般要求: a.尽量避免出现行位夹线。若不可避免,夹线位置应位于胶件不明显的位置,且夹线长度尽量短小,同时应尽量采用组合结构,使行位夹线部位与型腔可一起加工。 如图13.2.1a,13.2.1b所示。 b.为了便于加工,成型部位与滑动部分尽量做成组合形式。如图13.2.2所示。 夹线 夹线
图13.2.1a 加工工艺性不好,因为行 位上的成型部分不可以同前模一起加工,图示“夹线”部位不易接顺,影响模具质量。
图13.2.1b 加工工艺性好,因为行位上 的成型部分(去掉镶针)可以同前模一起加工,图示“夹线”部位容易接顺,可提高模具质量。
图13.2.2 型芯为镶拼结构,有利于制做及维修
模具设计指南 10/20/18 page 2of 15 (2)行位机构的组件及其装配部位应保证足够的强度、刚度。 行位机构一般依据经验设计,也可进行简化计算(计算参阅模芯强度计算方法 CVA/CVB),为保证足够的强度、刚度,一般情况采用: A.结构尺寸最大。在空间位置可满足的情况下,行位组件采用最大结构尺寸 B .优化设计结构。例如以下几种情况 1)对较长行位针末端定位,避免行位针弯曲,如图13.2.3
2)加大斜顶的断面尺寸,减小斜顶的导滑斜度,避免斜顶杆弯曲,如图13.2.4 所示,在胶件结构空间“D”允许的情况下,加大斜顶的断面尺寸“a”“b”,尤其是尺寸“b”,同时,在满足侧抽芯的前提下,减小角度“A”,避免斜顶在侧向力的作用下杆部弯曲。 3)改变铲鸡的结构,增强装配部位模具的强度。如图13.2.5a ,13.2.5b ,13.2.6a 13.2.6b所示。

河南工程学院《机器人技术基础》考查课专业论文工业机器人结构设计学生姓名:肖慧慧学院:机械工程学院专业班级:机制1321专业课程:机器人技术基础任课教师:***2014年12月25 日工业机器人结构设计摘要机器人是一种由三个自由度组成的平面关节型机器人,它的主要作用是可以完成精密仪器和物体的搬运和移动。
由于体积小,传动原理简单,被广泛运用于电子电气业,家用电器业,精密机械业等领域。
整个系统由机器手,机器臂,关节,步进电机驱动系统等组成。
通过各自由度步进电机的驱动,完成机器手,机器臂的位置变化。
具体设计内容为:同步齿形带传动设计,丝杠螺母设计,各输出轴和壳体的设计,步进电机的选择等。
在校核满足其结构强度的基础上,我们对机器人的结构进行优化设计。
关键词:机器人,结构设计,机器臂Industrial Robot Structure DesignABSTRACTRobot is a robot of plane and joint composed of three degrees of freedom. Its mostly function is used to complete transition and motion of exact apparatuses and objects. Because of its small volume and simple drive principle, it is widely used in the field of electronic and electric industry, home-used electric-ware industry and exact mechanism. The whole system is composed of manipulator hand, manipulator arm, joints and stepper motor driving system. By stepper motor’s driving of each degree of freedom, it completes location change of manipulator hand and manipulator arm. The idiographic designing content is designing of in-phase tooth-shape strap, designing of silk-bar nut, designing of shell and axis and the choice of stepper motors. On the base of checking its structure intensity, while it satisfied, we optimize designing of the structure of Robots.Key Words: Robots, Structure Design, Manipulator Arm.一、绪论1.1 前言工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,逐渐成为一门新兴的学科——机械手工程。