棒料切割机的设计
棒料切割机的设计
目录
摘要 (1)
关键词 (1)
Abstract: (1)
Key words: (2)
引言 (2)
1概述 (2)
1.1 选题背景 (2)
1.2 研究意义 (2)
2 切割部分设计 (3)
2.1 切割部分设计要求 (3)
2.2 切割部分设计方案 (4)
2.3 切割部分工作原理 (4)
2.4 切割部分结构设计 (5)
2.4.3 带传动设计 (5)
2.4.4 升降液压缸的设计 (9)
2.4.5 滚动轴承的选取及校核 (14)
3 夹紧部分设计 (17)
3.1 夹紧机构设计要求 (17)
3.2 夹紧部分方案设计 (17)
4 纵横行走部分的设计 (18)
4.1 纵横行走装置设计要求 (18)
4.2 纵横行走部分方案设计 (18)
4.3 直线导轨的选择计算 (18)
4.3.1 选定条件 (18)
4.3.2 选择方式 (18)
5 液压传动系统设计 (20)
5.1液压传动机构 (20)
5.2 液压传动原理图 (21)
6 电气控制的设计 (21)
6.1 电气控制设计要求 (21)
6.2 电气控制设计方案 (21)
6.3 可编程控制器PLC控制流程 (22)
7 结论 (23)
附录A—PLC I/O端口分配图 (25)
附录B—棒料切割机装配图 (25)
致谢 (27)
棒料切割机的设计
机械电子专业学生韦忠爽
指导教师闫冰洁
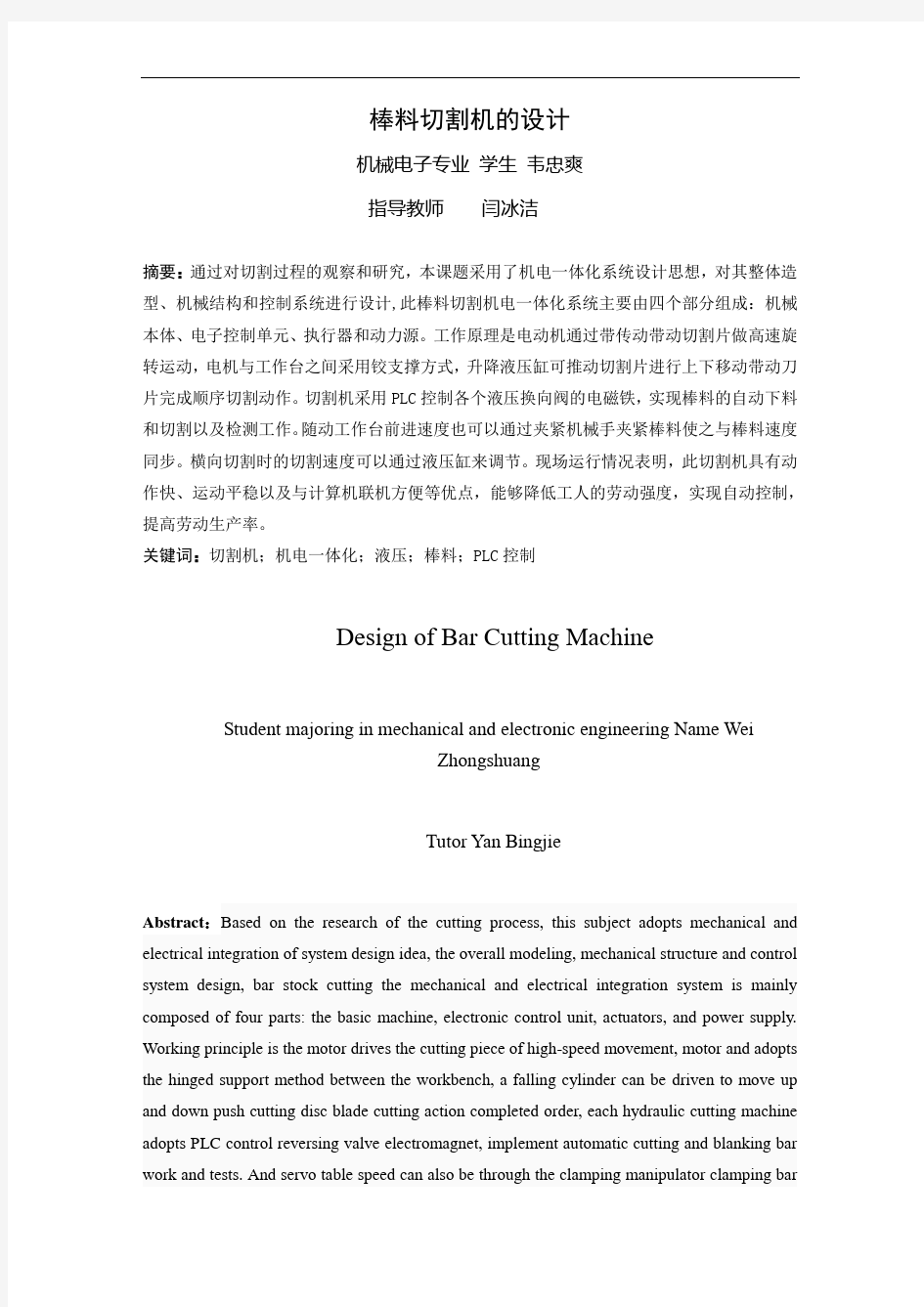
摘要:通过对切割过程的观察和研究,本课题采用了机电一体化系统设计思想,对其整体造型、机械结构和控制系统进行设计,此棒料切割机电一体化系统主要由四个部分组成:机械本体、电子控制单元、执行器和动力源。工作原理是电动机通过带传动带动切割片做高速旋转运动,电机与工作台之间采用铰支撑方式,升降液压缸可推动切割片进行上下移动带动刀片完成顺序切割动作。切割机采用PLC控制各个液压换向阀的电磁铁,实现棒料的自动下料和切割以及检测工作。随动工作台前进速度也可以通过夹紧机械手夹紧棒料使之与棒料速度同步。横向切割时的切割速度可以通过液压缸来调节。现场运行情况表明,此切割机具有动作快、运动平稳以及与计算机联机方便等优点,能够降低工人的劳动强度,实现自动控制,提高劳动生产率。
关键词:切割机;机电一体化;液压;棒料;PLC控制
Design of Bar Cutting Machine
Student majoring in mechanical and electronic engineering Name Wei
Zhongshuang
Tutor Yan Bingjie
Abstract:Based on the research of the cutting process, this subject adopts mechanical and electrical integration of system design idea, the overall modeling, mechanical structure and control system design, bar stock cutting the mechanical and electrical integration system is mainly composed of four parts: the basic machine, electronic control unit, actuators, and power supply. Working principle is the motor drives the cutting piece of high-speed movement, motor and adopts the hinged support method between the workbench, a falling cylinder can be driven to move up and down push cutting disc blade cutting action completed order, each hydraulic cutting machine adopts PLC control reversing valve electromagnet, implement automatic cutting and blanking bar work and tests. And servo table speed can also be through the clamping manipulator clamping bar
to that of the bar speed synchronization. Transverse cutting when the cutting speed can be adjust by hydraulic cylinder. Field operation shows that, the design of the cutting machine is fast, smooth movement, and convenient with computer on line, it can improve the labor intensity of workers, to achieve automatic control, improve labor productivity.
Key words:Cutting machine; Mechanical and electrical integration; Hydraulic pressure; bar; PLC control
引言
当今时代正是中国发展的黄金时代,中国又是一个发展中国家,要想谋求更大的发展,行业的转型是一定的,所以轻工业的转型,重工业与机械制造的行业的重视是必然的。就这一点来看,让我们清晰看到机械行业的发展前景有着如此大的潜力。它与其他行业有着千丝万缕的联系,随着经济的发展和科技的进步,越来越多的产品智能化、自动化、网络化,单纯的机械已经不能适应行业发展的需要,渐渐地就出现了机电一体化。现代机械的机电一体化的目标是综合利用机、电、信息、控制等各方面的相关技术的优势[1],扬长避短以达到系统优化的效果,取得显著地社会效益和技术经济效益。
1概述
1.1 选题背景
机电一体化产品广泛应用各种加工业,切割技术也有了飞速的发展,手工切割已经适应不了现代工业发展的要求。如今已进入以通用机械时代。几十年来,切割技术的研究和发展一直比较活跃,设计在不断的修改,品种也在不断的增加,应用领域也在不断的扩大。而目前市面上有很多型号的棒料切割机结构复杂,调节,维修不方便,生产效率低,智能化低等不足。
1.2 研究意义
本棒料切割机的切割机构属于机械技术领域,它解决了现有的自动切割机所存在的精度不高,操作复杂,智能化低等问题。本课题针对目前市场上的切割机设计的不足,对棒料切割机进行改造创新,增加智能化程度,设计出具有控制方便,性能稳定,结构简单,调节、维修方便,安全可靠,低能耗,在切割过程中能使棒料位置稳定、切割长度准确,生产率高,运行平稳,提高产品质量,提高生产效率等优点的具有广泛应用前景的方案。
与一般现在市面上的切割机相比,本次设计的这种切割机有以下优点:
1)实现了机械工程和自动控制的有效结合,机械部分采用机械优化设计,整个设计过程中都进行了综合技术比较与经济评价,实现了预定的功能。
2)整个运动过程都采用了液压传动控制,与气压传动相比,液压传动有可
在大范围内实现无级调速;液压传递运动均匀、平稳;易于实现过载保护等优点。
3)在设计过程中,纵横行走装置采用了直线导轨,既提高了运动系统的运动精度,又很大程度的减小了摩擦力,达到了节能的效果。
4)整个切割过程都由PCL 控制,以其结构简单合理、设备性能良好、生产率高、安全系数高等因素,满足了自动化大批量的生产要求。
所设计的棒料切割机,融合了液压自动控制、机器人技术和PLC 控制技术。PLC 控制各个液压换向阀的电磁铁,由液压缸驱动机械手完成顺序切割过程,实现了机械设计、电器控制和液压传动控制的有效结合。此棒料切割机是一种既能有效的提高生产率,又在价格和使用方面能被广大用户所接受的一种新型的自动控制切割机。
2 切割部分设计
2.1 切割部分设计要求
为了保证棒料的剪断,剪应力应超过材料的许应剪应力][τ,即切断棒料的条件为: []Q A
ττ=≤ (2-1)
查资料可知棒料的许用剪应力为:[]MPa 285~128=τ,取最大值
MPa 285。由于本切断机切断的最大棒料粗度为:mm d 35max =。
则本机器的最小切断力Q 由(2-1)得:
[]274063N 4
3514.32854
22m ax >??=?>Q d Q πτ 取切割机的N Q 280000=
项目设计采用机电一体化设计思想,要求棒料切割机采用PLC 对棒料的切割过程及检测进行自动控制,并能根据PLC 定长信号分别切割两条连续的棒料,完成了系统的硬件和软件设计后可以实现对棒料的准确定长切割,切割后自动返回初始位置。原始棒料尺寸范围在角钢:10100100?? 圆钢:50φ≤ 槽钢:120x53 钢管:6135?φ,切割成m l ~0.1之间的棒料,其切口深度为35mm ~ 5,再用压断机进行压断处理。
2.2 切割部分设计方案
切割部分主要有砂轮切片、电动机和传动机构组成。现在设计的在切割部分有两种方案可行:第一,电动机通过带传动带动切割片转动。第二,电动机通过圆锥齿轮传动方式带动切割片转动。但考虑到切割过程中电动机带动切割片进行高速旋转运动,所以优先选取第一种方案,原因是圆锥齿轮传动不宜应用在转速太高的场合,并且在运用齿轮进行传动时,还应考虑怎样消除震动和用什么方法润滑齿轮,这样就会使设计成本增加,而带传动则具有结构简单,传动平稳、价格低廉和缓冲吸振等优点。切割部分结构如图2-1所示。
图2-1 切割部分结构图
1-电动机;2-升降液压缸;3-砂轮片;4-支撑板;5-传送带
2.3 切割部分工作原理
切割部分的原理如图2-2所示,电动机带动割切片高速旋转运动,电机与工作台之间采用铰链支撑方式,升降液压缸可推动切割片进行上下移动,完成切割运动。横向行走液压缸可推动工作台横向移动,控制切割的长度。纵向行走液压缸可使工作台纵向移动,使切割片能切割两根棒料。其中电动机和液压缸电磁阀都需要通过由PLC机控制,实现其按照顺序完成动作。
1 图2-
2 切割部分原理简图
1-带轮;2-传送带;3-电机;4-砂轮;5-升降液压缸;6-进料道;7-横向行走板;8-夹具;
9-待加工棒料;10-横向行走液压缸;11-纵向行走板;12-纵向行走液压缸
2.4 切割部分结构设计
2.4.1 切割片的选取 设计任务所需电机的最小功率为KW P 2.2min =,主轴转速:2800r.p.m 条件下,轮片的最大线速度为s m /40。最终选取砂轮片的型号为A 型,其规格为32
3.2400??,磨料为棕刚玉,粒度为20#,硬度为R [2]。
2.4.2 电机的选取 根据切割系统的要求,应考虑电动机的种类、型式、额定电压、额定转速和额定功率、工作方式,在决定电动机功率时考虑到电动机的发热,允许过载能力启动能力等问题,现选用比较适合的Y 系列三相异步电动机,这是由于Y 系列三相异步电动机的功率等级和安装尺寸与国外同类型的先进产品相当,因而具有与国外同类型产品之间良好的互换性,供配套出口及引进设备替换。选取功率为
3.0KW ,额定电压:380V ,频 率:50HZ ,额定转速为2880r.p.m ,额定转矩m N ?3.2,型号为Y100-2,电动机选用三角型启动方法启动[3]。
2.4.3 带传动设计 根据带截面形状的不同,带传动可分为:平带传动、多楔带传动、圆带传动、V 带传动等。在一般的机械中由于V 带的楔形增压原理,结构紧凑,允许的传动比大,且多标准化并大批量生产,所以被广泛应用。
本设计中选用V 带传动。由于V 带传动中的带及带轮槽型均已标准化,所以设计的主要内容包括带的型号、确定基准长度、根数、中心距、带轮的材料、基准直径以及结构尺寸、初拉力和压轴力、张紧装置等参数。
(1)确定计算功率
由《机械设计》查得工作情况系数2.1=A K [4](电机带动砂轮切割铁棒,载荷性质为载荷变动较大),则计算功率为ca P
KW P K P A ca 6.332.1=?=?= (2-2)
公式中:
A K —工作系数[3];
P —所需传递的额定功率,KW 。
(2)初选带的型号
根据ca P 和1n ,由《机械设计》查的初选普通V 带[4]。
(3)确定带轮的基准直径1d d 和2d d ,并验算带速v
1)《机械设计》查得V 带的最小基准直径mm d d 75m in =[4],考虑到带轮太小,其弯曲应力过大,所以要使min 1d d d ≥,取mm d d 1601=
2)验算带的速度v s m n d v d /1.24100060288016010006011=???=??=
ππ
(2-3)
带速不宜过高或过低,一般应使5~25/v m s =,因为 m m 251.245≤≤带速符合要求。
3)计算大带轮的基准直径2d d ,并根据《机械设计》加以取整
1212d d d n n d ?=
(2-4)
由于电机转速与砂轮转速基本同步,选速比 21n n =1,则基准直径2d d
mm d d d d 16012==
(4)确定中心距a 并选择V 带的基准长度d L 1)根据带传动总尺寸的限制条件或要求的中心距初定中心距0a
由综合式 )(2)(7.021021d d d d d d a d d +≤≤+,
(2-5)
考虑到结构要求,初选mm a 9000=
带的初始长度0d L : 0
21212004)()(22a d d d d a L d d d d d -+++=π
(2-6)
9004)160160()160160(290022
+-+++?=π
mm 2302=
由《机械设计》V 带的基准长度系列及长度系数表中取带的87.0=l K [4],带基准长度mm L d 2000=
2)最后确定中心距a mm L L a a d d 7492
23022000900200=-+=-+
= (2-7) 则 mm L a a d 7352000015.0765015.0min =?-=-= (2-8)
mm L a a d 8252000030.076503.0max =?-=+= (2-9)
最后取 mm a 825~735=
(5)验算带轮包角1α
a a d d d d 0
1213.57180?--?≈α (2-10)
7503.577651501501800
?--?= ?>?=120180 (合适)
(6)确定带的根数z
a L A r ca K K P P P K P P z )(00?+==
(2-11)
其中: r P —额定功率,KW ;
由《机械设计》查得: KW P 3.00=?[4];
由《机械设计》查得包角系数1=a K [4];
由《机械设计》查得长度系数03.1=L K [4];
采用非化纤结构的普通带,取材质系数75.0=K [4]。
由《机械设计》查得V 带处于临界打滑状态所能传递的最大功率KW P 2.20
=[4] KW P r 70.175.0)03.11.2.2(=???=
12.270.16.3==≥
r ca P P z
取3=z 根。
(7)确定单根带的初拉力0F 20))5.2((
500qv zv K P K F a ca a +-?= (2-12)查得1.0=q [4],对于新安装的带,初拉力为min 0)(5.1F ;对于运转后带初拉力min 0)(3.1F N F 4.951.241.0)1.2430.16.3)15.2((
50020=?+???-?= (2-13) (8)计算带对轴的压力Q N z F Q 6.5722
180sin 34.9522sin
210=????==α (2-14)
(9)张紧装置的选择
各种材质的V 带都不是完全的弹性体,在预紧力的作用下,经过一定时间的运转后,就会由于塑性变形而松弛,使初拉力降低。为了保证带传动的能力,应定期检查初拉力的数值。如发现不足时,必须重新张紧,才能正常工作。常见的张紧装置有以下几种:定期张紧装置、自动张紧装置和采用张紧轮的装置。因为在本方案中中心距不能调节,可采用张紧轮将带张紧。张紧轮放在松边内侧,使带只受单向弯曲,同时张紧轮还应尽量靠近大轮,以免过分影响小带轮的包角。
(10)带轮的设计
带轮的设计要求及设计内容
设计带轮时应满足的要求有:质量小,结构工艺性好,无过大的铸造应力,质量分布均匀,转速高时经过动平衡,轮槽工作面加工精细,以减小带的磨损,各槽的尺寸和角度保持一定的精度,以使载荷分布均匀。设计内容为根据带轮的基准直径和带轮的转速等已知条件,确定带轮的材料,结构形式、轮槽、轮辐和轮毂的几何尺寸、公差和表面粗糙度以及相关技术要求。
1)带轮的材料
带轮的材料主要采用铸铁,常用材料的牌号为HT150或HT200,转速较高时宜采用铸钢,或用钢板冲压后焊接而成[7]。在本次设计中,采用了比较常见的HT150。
2)带轮的结构尺寸
由于带轮的基准直径mm d d 160=,轴的直径mm d 30=,根据带轮的选择原则:即当 mm d d d 3005.2≤≤ 时采用腹板式结构,铸造带轮的结构如图2-3所示。
图2-3 带轮的结构
2.4.4 升降液压缸的设计
(1)液压缸设计要求
根据主机系统设计的要求,应考虑液压系统的执行件的数量、运动形式、工作循环、行程范围、各执行件的运作顺序、液压元件承受的负载、运动速度、变化范围。对液压系统的性能要求有调速性能,运动平稳性能、转换精度、可靠性程度、使用与维修的方便性等
(2)选择安装方式
根据结构设计的要求,要实现砂轮片的上下移动完成切割,要求液压缸在上下伸缩的同时,还要绕点转动,所以选用铰链连接安装方式。
图2-4 手动切割机受力示意图
1-砂轮片;2-手柄
(3)负载大小
根据手动切割机的工作原理(如图2-4所示),
图中F=300N 估算得砂轮片的支反力为600
N。
=
再由所设计切割机的切割受力示意图(如图2-5所示)
由于砂轮所受的支反力相同,算得液压缸所承受的力即理论推力为'=
F1200
N
(4)工作压力
当前所用的液压缸的负载小于Kg
5的工作压力一般在MPa
8.0左右,所以选取其正常工作压力为MPa
1[5]。因为在设计时一般要求安全系数比较高,所以在选取液压缸的时候一般要求有较大余量,所以在缸径选择时,其工作压力一般按1计算。
MPa
(5)缸径选择
图2-5 棒料切割机受力示意图
1-砂轮片;2-液压缸
理论推力为N
40。考虑到安全系数,初选缸径为1200时,需选择其缸径为mm
60。(6)行程大小
mm
根据机构简图(如图2-6所示),其中实线为机构初始位置,在初始位置时,砂轮片的直径在最大状态,当砂轮切割到终位(图2-6中虚线部分)时,连杆所转过的角度为?
10,此时砂轮直径为最小直径。
图2-6 气缸行程计算简图
1-砂轮;2-液压缸;3-工件
在初始位置时测得液压缸的总长度为mm
=,在终了位置时测得液压
L540
1
缸的总长为mm
=,所以在此过程中气缸的行程
L440
2
mm L L L 10021=-= (2-15)即升降液压缸的行程为mm L 100=
(7)液压缸稳定性校核
1) 液压缸直径校核
液压工作压力Pa P 6101?=工作,则液压缸直径
工作理论力P F D ?=π4 = mm 1.3910
1120046=???π (2-16) 取mm 40=D 。考虑到安全系数,选缸径为mm 60合理。
2)液压缸活塞杆选择及校核 4
2理论液压缸P D F ??=π (2-17) =
()N F N 12001.5.1962410105.062=>=???理论π
故设计符合要求。 由3.0~2.0/=D d ,可计算出活塞杆直径d
()m m 18~123.0~2.0==D d (2-18) 可取活塞杆直径mm 12=d 。
通过公式 []σπ≤2d 4工作
F
(2-19)
对d 进行校核,
其中 []MPa 120=σ;
N F 1200=理论;
则 12mm mm 6.3120
12004<=??≥πd 选活塞杆直径为mm 12=d 的液压缸符合要求。
在所需要的行程杆长s l 2≥的前提下15L/d ≥,须进行稳定校核,应使活塞杆承 受的力F 不能超过使它保持稳定工作所允许的临界压力cr F ,但考虑到安全性,安全因数工作F F n /cr =应大于规定的许用安全因数st n ,以免发生纵向弯曲,破坏液压缸的正常工作。(PA F =工作为液压缸杆工作负载;
st n =4[6])关于稳定安全因数可在设计手册中查到。
两端铰支链接的、细长压杆的临界力的欧拉公式[6] 22)(ul EI F cr π=
(2-20)
其中:
截面的惯性矩: 464d I π
=;
杆件的两端都是铰链连接:1=μ;
N N F n F st cr 45216)1060(1014236=?????==-π工作 (2-21) mm m d Pa F EI l cr 215215.045216164)10210(4922==????==
ππμπ (2-22)
则所选取的杆长不超过mm 215,且大于行程mm 1002?,所以选取液压缸活塞杆的长度mm 200,
3) 缸筒壁厚的计算
缸筒壁厚可按薄壁筒公式计算:
[]σδ2p DP = (2-23) 式中: δ——缸筒壁厚()mm ;
D ——液压缸内径()mm 60;
p P ——实验压力,取Pa P P p 51022?==工作
; 材料为:ZQ 的许用应力[]MPa 4.2=σ[6]
可计算出壁厚δ m m 5.210
4.221026065
=????=δ (2-24)
因此,液压缸外径'D
mm 655.2260=?+='D (2-25)
(8)确定液压缸型号
综上所述,根据《液压与气压传动》,选用型的标准液压缸ZQ-60/12×200-F2[7]合适,缸径为mm 60,活塞杆直径为mm 12,液压缸行程为mm 200,带防尘罩F
数量为2。
2.4.5 滚动轴承的选取及校核 在结构设计中,采用了既有转速高的优点,又能够承受少量轴向力的角接触球轴承,(其中轴向力的主要来源是安装或拆卸带轮时所承受的载荷估算载荷大小为100N )。据分析,在安装和拆卸带轮时的力相同的情况下,拆卸带轮时,轴承所受的力更大,所以选取轴向力A F 的方向向右,如图2-6所示。
图中M 为电极的输出转矩,F 为砂轮的切割阻力,在切割过程中,电极的输出转矩与砂轮所受的切割阻力矩大小相同,方向相反,在切割时相互抵消,所以在计算过程中不再考虑电极输出转矩和切割阻力对轴承的影响。
由于轴承受一定的轴向力,所以选取接触角?=25α的角接触球轴承。其代号为7207ACJ [7],基本额定动载荷KN C r 5.22=,基本额定静载荷 KN C or 5.16=[8]。
轴承的校核计算
(1)计算轴承所受的径向力1R 、2R ,其受力如图2-6所示
由力矩平衡条件02=∑M 得径向力1R 180
20200211?-?=
F F R (2-26) 18020550200800?-?= N 836=
由01=∑M 得径向力2R 180********?-?=
F F R (2-27) 180
20800200550?-?=
N 522=
图2-6 轴承计算简图
(2)计算派生轴向力1S 、2S
所选的轴承型号为7207ACJ ,其派生轴向力R S 63.0=
则 N R S 52786363.063.011=?== (2-28)
N R S 32952263.063.022=?== (2-29)
(3)求轴承所受的轴向力1A 、2A
21627100527S N F S A >=+=+
故轴承2被压紧,轴承1被放松,所以有
N S F A A 62710052712=+=+=
N S A 52711==
(4)计算当量动载荷1P 、2P
63.086352711==R A (2-30)
2.1522
62722==R A
(2-31)
由《简明机械零件手册》查得7207ACJ 型轴承的轴向载荷影响的判断系数
68.0=e [9]
因为 e R A <=63.0/11,所以 0,111==Y X ;
e R A >=20.1/22,所以 87.0,41.022==Y X
由《机械设计》查得,当轴承受中等冲击或中等惯性力时,取载荷系数5.1=d f [4],由于轴承1、2均不受力矩载荷的作用,所以取0.11=m f ,0.12=m f 。
则
)(111111A Y R X f f P m d +?=
(2-32)
)52708360.1(0.15.1?+???=
N 1254=
)(222222A Y R X f f P m d +?=
(2-33)
)62787.052241.0(0.15.1?+???=
N 1140=
(5)计算所需轴承的动载荷
由《机械设计》查得,当轴承的工作温度小于C ?120时,其温度系数0.1=t f [4] 比较两当量动载荷知,21P P >,所以应该按1P 计算 (球轴承应取3=ε)则所需
轴承的额定动载荷为'c ε6'10'1060h t L n f P c ?= (2-34) 3610123652840600.11254???=
34830284060100
1254??= N 11286=
(6)确定轴承型号
由《简明机械零件手册》查得轴径mm d 35=时,应选轴承的代号为7207ACJ [8],其额定载荷为KN c KN C r 286.115.22'=>=。
故选用代号为7207ACJ 的轴承合适。
3 夹紧部分设计
3.1 夹紧机构设计要求
夹紧机构不但要求在切割之前机械手能够根据事先收到的信号准确地运动到每个工位,而且在切割过程中要夹紧运动着的棒料,使砂轮与棒料同步。
3.2 夹紧部分方案设计
夹紧部分是由液压缸推动机械手实现夹紧和放松的。这部分的两种可行性方案是:一是用一个机械手同时负责夹紧两根铸棒,根据需要对被切割的那条进行夹紧。二是用两个机械手,每个机械手负责夹紧一根铸棒。第一种方案中,机械手可通过一个二位液压缸和一个三位液压缸实现对棒料的夹紧。第二种方案中,每个机械手都需要两个二位液压缸来实现对棒料的夹紧。考虑到第一种方案设计工作量小,安装方便,而且控制简单,所以优先使用第一种方案。
1 2
图3-1 夹紧部分原理图
1-夹紧机械手;2-夹紧气压缸;3-横向行走气压缸;4-纵向行走板;5-纵向行走液压缸;6-横向行走板
夹紧部分原理如图3-1所示,夹紧气缸能使夹紧机械手夹紧或放松工件,当活塞向右移动时,机械手夹紧工件,当活塞向左移动时,机械手放松工件。横向行走气缸推动工作台左右移动,能控制机械手使之夹紧左边或右边的工件,从而对夹紧的工件进行切割。纵向行走液压缸的作用是当完成一次切割过程完成时,推动工作台使之恢复到初始位置。整个工作过程都由PLC控制实现。其中ST4-ST9为控制液压缸的行程开关。
4 纵横行走部分的设计
4.1 纵横行走装置设计要求
纵横行走装置主要是为了配合切割装置和夹紧装置,使砂轮片和夹紧机械手能够在走刀过程中横向移动,迅速准确地达到工作位,在切割过程中能够随着棒料纵向移动,切完后在返回初始位置。
4.2 纵横行走部分方案设计
纵横行走装置主要是为了实现切割机砂轮片的纵向和横向移动,使之完成切割动作。为了设计和制造方便,在方案设计中纵、横向行走装置的原理大致相同,即采用结构简单而又便于控制的液压传动方式,液压缸带动纵向行走板或横向行走板在导轨上滑动。
在设计过程中,考虑到能量的损耗程度,纵横行走装置采用了直线导轨,既提高了运动系统的运动精度,又很大程度的减小了摩擦力,达到了节能的效果。
4.3 直线导轨的选择计算
4.3.1选定条件
(1)载荷 根据粗略计算,导轨上横向行走部分的总质量为kg 200
所以重量N g m W 200010200=?=?=
(2)行程 根据设计结构的要求,选定行程m L s 5.2=
(3)往复次数 21=n (次/分)
(4)寿命要求 假设机器寿命为5年,则导轨寿命为L
35000243655=??=L 小时
假设安装4个滑块,要计算一个滑块的负载0P ,可用下式
N W P 50004
200040=== 同时由于两个滑块装在一个导轨上,因此接触系数81.0=c f 。
4.3.2选择方式
(1)根据静态安全系数选型号 s w c f f P f C ≥??00
(4-1)
其中 s f —静态安全系数
w f —载荷系数 (在无外部冲击或振动、低速时取1.5)
0C —基本额定静载荷
现设静态安全系数5=s f
则有 c
s f P f C 00?≥
(4-2)
81.05005?= kgf 3086=
在正常运行时一般选取安全系数为5,根据上述情况,选取SBG35FL 的导轨比较
理想。(2)根据寿命要求选型号
根据标准寿命L 计算公式 km L 94501750054.0=?=
若使用17500小时,则总的移动距离为L 50)(
30????=P C f f f f L w c H T (4-3)
其中 T f ——温度系数 (由手册查得当导轨的工作温度小于100C ?时,
其温度系数取1.0[8])
H f ——硬度系数 (为了使直线运动系统达到最佳承载能力,需要保持导轨的硬度在HRC58-62,由手册查得H f 为1.0[8])
C ——基本动载荷
所以 50)(30????=P C f f f f L w c H T 50)2505.181.011(94503????=C
解得 kgf C 3000=
因此,选取SGB45FL (kgf C 3800=)
(3)复查
理论上选取SGB35FL 或上一级似乎比较恰当,但考虑到标准寿命,选择SGB45FL [8]更理想。纵横行走部分的结构图如图4-1所示:
引言 机电一体化产品广泛应用各种加工业,切割技术也有了飞速的发展,手工切割已经适应不了现代工业发展的要求。同时,切割机的夹紧机构也有了迅速的发展,一些简单的机械手已经得到广泛的应用。简单的机械手经过几十年的发展,如今已进入以通用机械手为标志的时代。几十年来,这项技术的研究和发展一直比较活跃,设计在不断的修改,品种也在不断的增加,应用领域也在不断的扩大。简单的机械手是一种仿人操作、自动控制、的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。 我们设计的铸棒线切割机结构简单,性能安全可靠,操作方便可行,很好的实现了其预定功能。铸棒线切割机主要由三个大的部分组成,即切割部分、夹紧部分和纵横行走部分。 切割部分是由电极带动砂轮旋转,由气缸控制砂轮上下移动完成切割。夹紧部分主要采用了一个气动夹紧机械手,电磁阀控制气缸活塞的伸缩来实现夹紧和放松。纵横行走部分是由气缸控制纵向、横向行走板,使之沿直线导轨前进或返回。 整个机器由PLC控制各个气动换向阀的电磁铁,由气缸驱动完成顺序切割动作过程。而随动工作台的随动前进速度也可以通过夹紧机械手夹紧铸棒使之与铸棒速度同步。横向切割时的切割速度可以通过气缸来调节。 与一般的切割机相比,这种切割机有以下优点: 一、实现了机械工程和自动控制的有效结合,机械部分采用机械优化设计,
整个设计过程中都进行了综合技术比较与经济评价,实现了预定的功能。 二、整个运动过程都采用了气压传动控制,与液压传动相比,气压传动有无介质费用、处理方便、无泄露污染、无介质变质等优点。 三、在设计过程中,纵横行走装置采用了直线导轨,既提高了运动系统的运动精度,又很大程度的减小了摩擦力,达到了节能的效果。 四、整个切割过程都由PCL控制,以其结构简单合理、设备性能良好、使用寿命长、安全系数高等因素,满足了自动化大批量的生产要求。 这种切割机具有控制方便,性能稳定,结构简单,调节、修改方便、生产率高等优点,具有广阔的应用前景。
400×600数控激光切割机结构设计毕业设计论文 1 绪论 1.1课题背景 激光被誉为二十世纪最重大的科学发现之一,它刚一问世就引起了材料科学 家的高度重视。 1971年 11月,美国通用汽车公司率先使用一台 250W CO2激 光器进行利用激光辐射提高材料耐磨性能的试验研究,并于 1974年成功地完成 了汽车转向器壳内表面(可锻铸铁材质)激光淬火工艺研究,淬硬部位的耐磨性 能比未处理之前提高了 10倍。这是激光表面改性技术的首次工业应用。多年以 来,世界各国投入了大量资金和人力进行激光器、激光加工设备和激光加工对材 料学的研究,促使激光加工得到了飞速发展,并获得了巨大的经济效益和社会效 益。如今在中国,激光技术已在工业、农业、医学、军工以及人们的现代生活中 得到广泛的应用,并且正逐步实现激光技术产业化,国家也将其列为 “九五”攻关 重点项目之一。 “十五”的主要工作是促进激光加工产业的发展,保持激光器年产 值 20%的平均增长率,实现年产值 200亿元以上;在工业生产应用中普及和推 广加工技术,重点完成电子、汽车、钢铁、石油、造船、航空等传统工业应用激 光技术进行改造的示范工程;为信息、材料、生物、能源、空间、海洋等六大高 科技领域提供崭新的激光设备和仪器。 数控化和综合化把激光器与计算机数控技术、先进的光学系统以及高精度和
自动化的工件定位相结合,形成研制和生产加工中心,已成为激光加工发展的一个重要趋势。 1.2现实意义 激光切割机是光、机、电一体化高度集成设备,科技含量高,与传统机加工 相比,激光切割机的加工精度更高、柔性化好,有利于提高材料的利用率,降低产品成本,减轻工人负担,对制造业来说,可以说是一场技术革命。 激光切割的适用对象主要是难切割材料,如高强度、高韧性、高硬度、高脆性、磁性材料,以及精密细小和形状复杂的零件。激光切割技术、激光切割机床正在各行各业中得到广泛的应用。因此研究和设计数控激光切割有很强的现实意义。微机控制技术正在发挥出巨大的优越性。 1.3设计任务 本次设计任务是设计一台单片机( 89C51主控芯片)控制激光切割机床,主
毕业设计(论文) 设计(论文)题目: 棒料切割机 系别:机械工程系 专业:机械制造/计算机 班级: 学号: 姓名: 引言 机电一体化产品广泛应用各种加工业,切割技术也有了飞速的发展,手工切割已经适应不了现代工业发展的要求。同时,切割机的夹紧机构也有了迅速的发展,一些简单的机械手已经得到广泛的应用。简单的机械手经过几十年的发展,如今已进入以通用机械手为标志的时代。几十年来,这项技术的研究和发展一直 1
比较活跃,设计在不断的修改,品种也在不断的增加,应用领域也在不断的扩大。简单的机械手是一种仿人操作、自动控制、的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。 我们设计的铸棒线切割机结构简单,性能安全可靠,操作方便可行,很好的实现了其预定功能。铸棒线切割机主要由三个大的部分组成,即切割部分、夹紧部分和纵横行走部分。 切割部分是由电极带动砂轮旋转,由气缸控制砂轮上下移动完成切割。夹紧部分主要采用了一个气动夹紧机械手,电磁阀控制气缸活塞的伸缩来实现夹紧和放松。纵横行走部分是由气缸控制纵向、横向行走板,使之沿直线导轨前进或返回。 整个机器由PLC控制各个气动换向阀的电磁铁,由气缸驱动完成顺序切割动作过程。而随动工作台的随动前进速度也可以通过夹紧机械手夹紧铸棒使之与铸棒速度同步。横向切割时的切割速度可以通过气缸来调节。 与一般的切割机相比,这种切割机有以下优点: 一、实现了机械工程和自动控制的有效结合,机械部分采用机械优化设计,整个设计过程中都进行了综合技术比较与经济评价,实现了预定的功能。 二、整个运动过程都采用了气压传动控制,与液压传动相比,气压传动有无介质费用、处理方便、无泄露污染、无介质变质等优点。 三、在设计过程中,纵横行走装置采用了直线导轨,既提高了运动系统的运动精度,又很大程度的减小了摩擦力,达到了节能的效果。 四、整个切割过程都由PCL控制,以其结构简单合理、设备性能良好、使用寿命长、安全系数高等因素,满足了自动化大批量的生产要求。 这种切割机具有控制方便,性能稳定,结构简单,调节、修改方便、生产率 2
本科毕业设计(论文) 题目:棒料切割机的设计 英文题目:Design of Bar Cutting Machine 学院:机电工程学院 专业:机械设计制造及其自动化 姓名:鹿文晓 学号: 20120460116 指导教师:孙玉芹 2016年5月10日
毕业设计(论文)独创性声明 该毕业设计(论文)是我个人在导师指导下进行的研究工作及取得的研究成果。文中除了特别加以标注和致谢的地方外,不包含其他人或其他机构已经发表或撰写过的研究成果。其他同志对本研究的启发和所做的贡献均已在论文中作了明确的声明并表示了谢意。 作者签名: 日期:年月日 毕业设计(论文)使用授权声明 本人完全了解青岛滨海学院有关保留、使用毕业设计(论文)的规定,即:学校有权保留送交毕业设计(论文)的复印件,允许被查阅和借阅;学校可以公布全部或部分内容,可以采用影印、缩印或其他复制手段保存该毕业设计(论文)。保密的毕业设计(论文)在解密后遵守此规定。 作者签名:导师签名:日期:年月日
摘要:机械工业是一个国家的重要产业,机械工业的发展无时不刻都在影响着国家经济的发展,人类的进步离不开机械工业的发展。在全球经济发展的大环境下,中国各个行业被其他国家的先进技术影响的同时,越来越多的外国企业和品牌传播到中国已经成为现实。在新的市场需求的推动下,对棒料切割机进行改良和优化是当务之急。生产棒料切割机的企业,必须充分考虑到在棒料切割机运行中可能出现的问题,尽量使棒料切割机的自动化程度越高越好,从而减少人工搬运工具的时间,国内棒料切割机的研发及制造要与全球号召的高效经济、安全稳定主题保持一致。棒料切割机的发展与人类社会的进步和科学技术的水平密切相关。 设计的题目是棒料切割机的设计,目前,国内棒料切割机的研发也在向朝着运行高速化、功能复合化、控制智能化的方向发展,廉价、简单、方便成了工作台发展的主题。 关键词:机械产品棒料切割机智能化
电子科技大学 毕业设计(论文) 论文题目:数控激光切割机设计 教学中心:电子科技大学网络教育重庆学习中心指导老师:职称: 专业:电子信息工程
毕业设计(论文)任务书 题目:数控激光切割机设计 任务与要求:本文设计了一台单片机控制的数控激光切割机床,主要完成了:机床整体结构设计,Z轴、XY轴的结构设计计算、滚珠丝杠、直线滚动导轨的选择及其强度分析;以步进电机为进给驱动的驱动系统及其传动机构的分析设计计算;以89C51为主控芯片的数控系统硬件电路设计、系统初始化设计及系统软件方案设计和步进电机的控制程序设计。 时间:2010 年3月10 日至2010年 5 月13 日共周 办学单位:电子科技大学网络教育重庆学习中心 专业:机械设计与制造及其自动化 指导单位或教研室:重庆科创职业学院 指导教师:职称:
摘要 激光切割的适用对象主要是难切割材料,如高强度、高韧性材料以及精密细小和形状复杂的零件,因而数控激光切割在我国制造业中正发挥出巨大的优越性。 本文设计了一台单片机控制的数控激光切割机床,主要完成了:机床整体结构设计,Z轴、XY轴的结构设计计算、滚珠丝杠、直线滚动导轨的选择及其强度分析;以步进电机为进给驱动的驱动系统及其传动机构的分析设计计算;以89C51为主控芯片的数控系统硬件电路设计、系统初始化设计及系统软件方案设计和步进电机的控制程序设计。 关键词CNC,激光切割机床,结构,设计
ABSTRACT Laser cutting machine tool was usually used for the hard-cutting material, such as high-strength material, high precision ductile materials, and smart and complicated components. So, CNC laser cutting has been playing an important role in China's manufacturing industry. This paper describes the design of a SCM-controlled CNC laser cutting machine tools. More attention was paid on the overall machine design, Z axis, XY axis in the design, ball-screw and the choice of linear motion guide and intensity analysis; the drive system into which stepper motor was put and the analysis of the drive system design; 89C51 chip was mainly used for the design of hardware circuit, the design of system initialization and the design of stepper motor’s controlling program. Key words CNC, laser cutting machine tools, architecture, design
目录 1 绪论 (1) 1.1 电火花加工的产生和加工原理 (1) 1.1.1电火花加工的来源 (1) 1.1.2电火花加工的物理本质和工作原理 (1) 1.2 电火花加工的现状及发展 (4) 1.2.1电火花线切割加工的现状 (4) 1.2.2电火花线切割机的发展策略 (5) 1.2.3设计过程 (6) 2 工作台设计方案及其分析 (7) 2.1数控电火花线切割机床的机构组成及其作用 (7) 2.2坐标工作台的组成 (8) 2.3 主要参数 (9) 2.4 方案确定 (9) 2.4.1 床身结构 (9) 2.4.2 X-Y工作台 (9) 2.5坐标工作台的的传动精度对工艺指标的影响 (11) 3 结构设计 (12) 3.1 工作台外形尺寸及重量计算 (12) 3.2 滚珠丝杠副的设计计算 (13) 3.3 导轨的确定 (15) 3.4 步进电机的选用 (17) 3.5 轴承的设计计算 (18) 3.6 X向齿轮副的选用 (19) 3.7 Y向齿轮副的选用 (25)
结论 (30) 致谢 (31) 参考文献 (32)
第一章.绪论 1.1电火花加工的产生和加工原理 电火花加工是一种新的加工技术,自五十年代以来,我国开始研究和试用。经过不断发展,已得到日益广泛的应用,成为加工各种模具和零件的有效方法。1.1.1电火花加工的产生 电火花加工是利用两极见脉冲放电时产生的电腐蚀现象,对材料进行加工的方法。 早在十九世纪,人们就发现了电器开光的触点开闭时,以为放电,使接触部位烧蚀,造成接触面的损坏。这种放电引起的电极烧蚀现象叫做电腐蚀。起初,电腐蚀被认为是有害的,为减少和避免这种有害的电腐蚀,人们一直在研究电副食产生的原因和防止的办法。当人们掌握了它的规律之后,便创造条件,转害为益,把电腐蚀用于生产中。 研究结果表明,当两极产生放电的过程中,放电通道瞬时产生大量的热,足以使电极材料表面局部熔化或汽化,并在一定条件下,熔化或汽化的部分能抛离电极表面,形成放电腐蚀的坑穴。 二十世纪四十年代初,人们进一步认识到,在液体介质中进行重复性脉冲放电时,能够对导电材料进行尺寸加工,因此,创立了“电火花加工法”。 电火花加工是与机械加工性质完全不同的一种新工艺、新技术。机械加工是通过机床部件的相对运动,用比工件材料硬的刀具去切除工件上多余的部分,来得到成品零件的。但随着工业生产的发展和科学技术的进步,具有高熔点、高硬度、高强度、高脆性、高粘性、高韧性、高纯度等性能的新材料不断出现,具有各种复杂结构与特殊工艺要求的工件越来越多,仍然采用机械加工法,有时是难于加工或无法加工的。因此,人们除了进一步发展和完善机械加工法之外,还努力寻求新的加工法。电火花加工法能够适应生产发展的需要,并在应用中显出很多优异性能,因此得到了迅速发展和日益广泛的应用。 1.1. 2.电火花加工的物理本质和工作原理 电火花线切割加工是基于在液体介质中小间隙脉冲放电时材料的电腐蚀的切割加工,它是相当复杂的瞬变的微观物理过程,大致可分为介质击穿和通道形
四川文理学院 机械工程及自动化专业毕业论文选题指南 课题的选择: 1、毕业设计(论文)课题的选择应与机械专业方向及专业岗位群需求紧密结合,学生可结合企业生产、管理、服务实际情况及自己的兴趣爱好,在指导教师的指导下完成毕业设计(论文)选题及毕业设计(论文)。 2、在掌握文献资料的基础上,做好实际调查研究。 3、学生根据已掌握的资料,针对已选择课题进行分析、论证,提出独立见解,在指导教师指导下完成毕业设计(论文)。 毕业设计(论文)部分参考选题方向: (一)机械设计类毕业设计选题目录: 英寸钢管热浸镀锌自动生产线设计 矿用挖掘机斗杆结构有限元分析 吨悬挂悬挂提升机及传感器 米安全钻机 桥式起重机控制线路设计 数控激光切割机XY工作台部件及单片机控制设计 普通货车制动器设计 08.“包装机对切部件”设计 机架现场扩孔机设计 型泥浆泵曲轴箱与液力端特性分析、设计 地下自卸汽车工作、转向液压系统 型仿型切割机 Ⅱ型固定式带式输送机的设计 Ⅱ型皮带机设计 外圆滚压装置设计 型工程钻机 型双动拉伸压力机的设计 门式起重机总体 型凝汽式汽轮机调节系统的设计 插秧机及其侧离合器手柄的探讨和改善设计 控制电梯 切割机 型直切机的设计 锤片粉碎机设计 推料装置 中三维建模部分CAI制作 的三维CAD设计和CAM自动编程 应用模块课件的设计与制作
板料折弯机 型滚动轴承压装机设计 小型泥浆泵的结构设计 双出风口笼形转子选粉机 压装机整机液压系统设计 型轮式装载机 35.板材送进夹钳装置 36.棒料切割机 37.笔记本电脑主板装配线(输送带) 及其主要夹具的设计 38.拨叉加工自动线设计 39.播种机设计 40.插秧机系统设计 41.茶树重修剪机的开发研究 42.柴油机数字化快速设计系统中实例库的建立 43.柴油机专用换向阀工艺结构设计 44.铲平机的设计 45.常规量检测与控制工程专业综合实验设计 46.车载装置升降系统的开发 47.城镇污水处理厂设计 48.冲击回转钻进技术 49.抽油机机械系统设计(常规型) 50.出租车计价器系统设计 51.大型水压机的驱动系统和控制系统 52.大型制药厂热电冷三联供 53.大直径桩基础工程成孔钻具 54.带式输送机传动滚筒的防滑处理 55.带式输送机传动装置设计 56.带式输送机自动张紧装置设计 57.单轨抓斗起重机设计 58.弹簧CAD软件的开发 59.地下升降式自动化立体车库 60.电动自行车调速系统的设计 61.电脑主板回焊炉及控制系统设计 62.复合化肥混合比例装置及PLC控制系统设计 63.电液比例阀设计 64.钉磨机床设计 65.多功能自动跑步机(机械部分设计) 66.二级电液比例节流阀 67.钢筋调直机 68.钢筋弯曲机 69.钢筋弯曲机设计及其运动过程虚拟 70.隔水管横焊缝自动对中装置 71.隔振系统实验台总体方案设计 72.工程钻机的设计
目录 摘要 (Ⅰ) ABSTRACT (Ⅱ) 1 绪论 (1) 1.1课题背景 (1) 1.2现实意义 (1) 1.3设计任务 (1) 1.4总体设计方案分析 (2) 2 机械部分XY工作台及Z轴的基本结构设计 (4) 2.1 XY工作台的设计 (4) 2.1.1主要设计参数及依据 (4) 2.1.2 XY工作台部件进给系统受力分析 (4) 2.1.3初步确定XY工作台尺寸及估算重量 (4) 2.2 Z轴随动系统设计 (5) 3 滚珠丝杠传动系统的设计计算 (6) 3.1 强度计算 (6) 3.2 滚珠丝杠副的传动效率 (6) 4 直线滚动导轨的选型 (8) 5 步进电机及其传动机构的确定 (9) 5.1 步进电机的选用 (9) 5.1.1 脉冲当量和步距角 (9) 5.1.2步进电机上起动力矩的近似计算 (9) 5.1.3确定步进电机最高工作频率 (10) 5.2齿轮传动机构的确定 (10) 5.2.1传动比的确定 (10) 5.2.2齿轮结构主要参数的确定 (10) 5.3步进电机惯性负载的计算 (11) 6 传动系统刚度的讨论 (13) 6.1 根据工作台不出现爬行的条件来确定传动系统的刚度 (13) 6.2根据微量进给的灵敏度来确定传动系统刚度 (13) 7 消隙方法与预紧 (15)
7.1消隙方法 (15) 7.1.1偏心轴套调整法 (15) 7.1.2锥度齿轮调整法 (16) 7.1.3双片齿轮错齿调整法 (16) 7.2预紧 (17) 8 数控系统设计 (18) 8.1 确定机床控制系统方案 (18) 8.2 主要芯片配置 (18) 8.2.1主要芯片选择 (18) 8.2.2 主要管脚功能 (18) 8.2.3 EPROM的选用 (19) 8.2.4 RAM的选用 (20) 8.2.5 89C51存储器及I/O的扩展 (20) 8.2.6 8155工作方式查询 (21) 8.2.7状态查询 (22) 8.2.8 8155定时功能 (22) 8.2.9 芯片地址分配 (23) 8.3 键盘设计 (24) 8.3.1键盘定义及功能 (24) 8.3.2 键盘程序设计 (24) 8.4 显示器设计 (28) 8.4.1显示器显示方式的选用 (28) 8.4.2显示器接口 (29) 8.4.3 8155扩展I/O端口的初始化 (29) 8.5 插补原理 (30) 8.6光电隔离电路 (31) 8.7越界报警电路 (31) 8.8总体程序控制 (31) 8.8.1流程图 (30) 8.8.2总程序 (30) 9 步进电机接口电路及驱动 (34) 结论 (38) 参考文献 (39) 致谢 (40)
**大学 毕业设计说明书 (雨)3260 棒料切割机结构设计.doc(全套图纸) 专业: 学号: 1334095854 : 指导教师:雨辰 完成日期: 摘要
通过对切割过程的观察和研究,本课题采用了机电一体化系统设计思想,对其整体造型、机械结构和控制系统进行设计,此棒料切割机电一体化系统主要由四个部分组成:机械本体、电子控制单元、执行器和动力源。工作原理是电动机通过带传动带动切割片做高速旋转运动,电机与工作台之间采用铰支撑方式,升降气压缸可推动切割片进行上下移动带动刀片完成顺序切割动作。切割机采用PLC控制各个气压换向阀的电磁铁,实现棒料的自动下料和切割以及检测工作。随动工作台前进速度也可以通过夹紧机械手夹紧棒料使之与棒料速度同步。横向切割时的切割速度可以通过气压缸来调节。现场运行情况表明,此切割机具有动作快、运动平稳以及与计算机联机方便等优点,能够降低工人的劳动强度,实现自动控制,提高劳动生产率。 铸棒线割机在连续的铸造中工作,它是一种既能有效的提高生产率,又在价格和使用方面能被广大用户所接受的一种新型的自动控制切割机。由PLC控制的气动铸棒切割机,其中融合了气压自动控制、机器人技术和PLC控制技术。PLC控制各个气动换向阀的电磁铁,由气缸驱动机械手完成顺序切割过程,实现了机械设计、电器控制和气动控制的有效结合。这种切割机具有控制方便,性能稳定,结构简单,调节、维修方便,生产率高等优点,具有广泛的应用前景。 关键词:切割机机电一体化气压棒料 PLC控制
Abstract Based on the research of the cutting process, this subject adopts mechanical and electrical integration of system design idea, the overall modeling, mechanical structure and control system design, bar stock cutting the mechanical and electrical integration system is mainly composed of four parts: the basic machine, electronic control unit, actuators, and power supply. Working principle is the motor drives the cutting piece of high-speed movement, motor and adopts the hinged support method between the workbench, a falling cylinder can be driven to move up and down push cutting disc blade cutting action completed order, each hydraulic cutting machine adopts PLC control reversing valve electromagnet, implement automatic cutting and blanking bar work and tests. And servo table speed can also be through the clamping manipulator clamping bar to that of the bar speed synchronization. Transverse cutting when the cutting speed can be adjust by hydraulic cylinder. Field operation shows that, the design of the cutting machine is fast, smooth movement, and convenient with computer on line, it can improve the labor intensity of workers, to achieve automatic control, improve labor productivity. Casting rod wire cutting machine in continuous casting, it is a can effectively improveproductivity, but also in terms of price and use can be accepted by the majority of usersof a new automatic control cutting machine. PLC controlled pneumatic casting rodcutting machine, which combines automatic pressure control, robotics and PLC control technology. PLC control various pneumatic solenoid valve, cylinder driven by a robot to complete the sequence of the cutting process, to achieve an effective combination of mechanical design, electrical controls and pneumatic controls. This cutting machine haseasy to control, stable performance, simple structure, regulation, easy maintenance,high productivity advantages, has broad application prospects. Keywords:Cutting machine Mechanical and electrical integration Air pressure Bar PLC control
引言 本次毕业设计从2005年2月28号开始到本年的六月中旬结束,长达四个月。毕业设计是一名在校大学生最后的一次也是最重要的一次设计,说其重要主要是因为它将检验你在大学生活中所学知识的扎实程度,期间你必须复习所学过的一些课程,学习一些要用到的新的知识,它还将练习你的动手能力,思考能力,创新能力,是你在大学学习生活的一次升华,是一个提升阶段,更是走向工作岗位的一次练兵,因此我们都对此极为重视,更是投入了极大的热情与努力来更好的完成它。 本次设计在颜竞成教授的悉心指导下分四个阶段按部就班的有条不紊的进行。第一阶段是搜集整理阶段。在本阶段主要是搜集足够的资料信息并对设计题目进行分析和实地调查,做到心中清楚。本设计其实从2004年元旦就开始了,截止到2004年3月份第一张外观图绘制成功为止。第二阶段是机械部分设计阶段,本阶段主要应用大学里面所学到的饿专业知识来进行运丝机构设计和坐标工作台的横向和纵向进给机构设计。另外还要进行储丝筒的三维零件设计。本阶段主要是从三月份到五月份。五月份到六月份则是第三阶段:控制系统设计阶段。主要进行电器电路设计,包括步进电机驱动设计和脉冲功率放大电路设计。本阶段也是一个学习的阶段,对自己不太熟悉的领域的一次学习。六月份开始就是最后一个阶段:整理复习阶段,主要从事前几个阶段的整理温习,写说明书。以及毕业答辩前的各项具体细节的准备。 所以说每个阶段都是十分紧张而有难度的,有些问题是由于设计的难度,有些还是因为自己知识上的欠缺和基础不扎实造成的。可以说这次毕业设计是个查缺补漏的机会。尤其是在同学的协助下,特别是在颜教授的指导下,遇到困难不逃避,主动请教,主动学习,独立思考提出新方案,困难一个个的解决,才有了本次设计的成功。这次毕业设计锻炼了我团体协作精神和独立作业的能力。专业设计基础,对自己将来都是一次具有深远影响的事情。
棒料切割机的设计设计专业论文
目录 摘要 (1) 关键词 (1) Abstract: (1) Key words: (1) 引言 (2) 1概述 (2) 1.1 选题背景 (2) 1.2 研究意义 (2) 2 切割部分设计 (3) 2.1 切割部分设计要求 (3) 2.2 切割部分设计方案 (3) 2.3 切割部分工作原理 (4) 2.4 切割部分结构设计 (5) 2.4.3 带传动设计 (5) 2.4.4 升降液压缸的设计 (8) 2.4.5 滚动轴承的选取及校核 (12) 3 夹紧部分设计 (14) 3.1 夹紧机构设计要求 (14) 3.2 夹紧部分方案设计 (14) 4 纵横行走部分的设计 (15) 4.1 纵横行走装置设计要求 (15) 4.2 纵横行走部分方案设计 (15) 4.3 直线导轨的选择计算 (15) 4.3.1 选定条件 (15) 4.3.2 选择方式 (15) 5 液压传动系统设计 (17) 5.1液压传动机构 (17) 5.2 液压传动原理图 (17) 6 电气控制的设计 (18) 6.1 电气控制设计要求 (18) 6.2 电气控制设计方案 (18) 6.3 可编程控制器PLC控制流程 (19) 7 结论 (19) 附录A—PLC I/O端口分配图 (21) 附录B—棒料切割机装配图 (22) 致谢 (23)
棒料切割机的设计 机械电子专业学生韦忠爽 指导教师闫冰洁 摘要:通过对切割过程的观察和研究,本课题采用了机电一体化系统设计思想,对其整体造型、机械结构和控制系统进行设计,此棒料切割机电一体化系统主要由四个部分组成:机械本体、电子控制单元、执行 器和动力源。工作原理是电动机通过带传动带动切割片做高速旋转运动,电机与工作台之间采用铰支撑方式,升降液压缸可推动切割片进行上下移动带动刀片完成顺序切割动作。切割机采用PLC控制各个液压换向阀的电磁铁,实现棒料的自动下料和切割以及检测工作。随动工作台前进速度也可以通过夹紧机械手夹紧棒料使之与棒料速度同步。横向切割时的切割速度可以通过液压缸来调节。现场运行情况表明,此切割机具有动作快、运动平稳以及与计算机联机方便等优点,能够降低工人的劳动强度,实现自动控制,提高劳动生产率。 关键词:切割机;机电一体化;液压;棒料;PLC控制 Design of Bar Cutting Machine Student majoring in mechanical and electronic engineering Name Wei Zhongshuang Tutor Yan Bingjie Abstract:Based on the research of the cutting process, this subject adopts mechanical and electrical integration of system design idea, the overall modeling, mechanical structure and control system design, bar stock cutting the mechanical and
图书分类号: 密级: 毕业设计(论文) 数控激光切割机XY工作台 部件及单片机控制设计 CNC LASER CUTTING MACHINE XY WORK-BENCH COMPONENTS AND SCM CONTROL DESIGN 学生姓名 学院名称 专业名称 指导教师 20**年5月27日
摘要 本课题针对数控激光切割机进行了设计。主要完成了XY工作台的机械结构设计和单片机的控制系统的设计。设计过程中,对于XY工作台的机械结构进行了具体的设计分析,选用了精度相对高的滚珠丝杠副传动系统方案,具体对传动系统中的滚珠丝杠、直线滚动导轨、齿轮进行了计算和选型;为验证系统的可行性,对系统的刚度进行了分析;根据系统的要求和载荷,对步进电机进行了分析和选型。对以89C51为主控芯片的数控系统进行了硬件说明和控制程序设计。 关键词 CNC;数控激光切割机;XY工作台;单片机
Abstract This topic designs for CNC laser cutting machine. It completed the design of XY workbench mechanical structure and the CNC system. The design process has the design and analysis of XY workbench mechanical structure. To choice ball screw vice transmission system solutions which has a relatively high precision. There are specific calculation and selection on ball screw, linear rolling guide and gear of the transmission system; In order to validate the feasibility of the system, the stiffness of system are analyzed. The analysis and selection for stepping motor are according to the system's requirements and load. There are hardware specifications and design of control program for CNC system with 89C51 as the main control chip. Keywords CNC laser cutting machine tools XY table Single chip microcomputer
棒料切割机的设计 目录 摘要 (1) 关键词 (1) Abstract: (1) Key words: (2) 引言 (2) 1概述 (2) 1.1 选题背景 (2) 1.2 研究意义 (2) 2 切割部分设计 (3) 2.1 切割部分设计要求 (3) 2.2 切割部分设计方案 (4) 2.3 切割部分工作原理 (4) 2.4 切割部分结构设计 (5) 2.4.3 带传动设计 (5) 2.4.4 升降液压缸的设计 (9) 2.4.5 滚动轴承的选取及校核 (14) 3 夹紧部分设计 (17) 3.1 夹紧机构设计要求 (17) 3.2 夹紧部分方案设计 (17) 4 纵横行走部分的设计 (18) 4.1 纵横行走装置设计要求 (18) 4.2 纵横行走部分方案设计 (18) 4.3 直线导轨的选择计算 (18) 4.3.1 选定条件 (18) 4.3.2 选择方式 (18) 5 液压传动系统设计 (20) 5.1液压传动机构 (20) 5.2 液压传动原理图 (21) 6 电气控制的设计 (21) 6.1 电气控制设计要求 (21) 6.2 电气控制设计方案 (21) 6.3 可编程控制器PLC控制流程 (22) 7 结论 (23) 附录A—PLC I/O端口分配图 (25) 附录B—棒料切割机装配图 (25) 致谢 (27)
棒料切割机的设计 机械电子专业学生韦忠爽 指导教师闫冰洁 摘要:通过对切割过程的观察和研究,本课题采用了机电一体化系统设计思想,对其整体造型、机械结构和控制系统进行设计,此棒料切割机电一体化系统主要由四个部分组成:机械本体、电子控制单元、执行器和动力源。工作原理是电动机通过带传动带动切割片做高速旋转运动,电机与工作台之间采用铰支撑方式,升降液压缸可推动切割片进行上下移动带动刀片完成顺序切割动作。切割机采用PLC控制各个液压换向阀的电磁铁,实现棒料的自动下料和切割以及检测工作。随动工作台前进速度也可以通过夹紧机械手夹紧棒料使之与棒料速度同步。横向切割时的切割速度可以通过液压缸来调节。现场运行情况表明,此切割机具有动作快、运动平稳以及与计算机联机方便等优点,能够降低工人的劳动强度,实现自动控制,提高劳动生产率。 关键词:切割机;机电一体化;液压;棒料;PLC控制 Design of Bar Cutting Machine Student majoring in mechanical and electronic engineering Name Wei Zhongshuang Tutor Yan Bingjie Abstract:Based on the research of the cutting process, this subject adopts mechanical and electrical integration of system design idea, the overall modeling, mechanical structure and control system design, bar stock cutting the mechanical and electrical integration system is mainly composed of four parts: the basic machine, electronic control unit, actuators, and power supply. Working principle is the motor drives the cutting piece of high-speed movement, motor and adopts the hinged support method between the workbench, a falling cylinder can be driven to move up and down push cutting disc blade cutting action completed order, each hydraulic cutting machine adopts PLC control reversing valve electromagnet, implement automatic cutting and blanking bar work and tests. And servo table speed can also be through the clamping manipulator clamping bar
Abstract This topic designs for CNC laser cutting machine. It completed the design of XY workbench mechanical structure and the CNC system. The design process has the design and analysis of XY workbench mechanical structure. To choice ball screw vice transmission system solutions which has a relatively high precision. There are specific calculation and selection on ball screw, linear rolling guide and gear of the transmission system; In order to validate the feasibility of the system, the stiffness of system are analyzed. The analysis and selection for stepping motor are according to the system's requirements and load. There are hardware specifications and design of control program for CNC system with 89C51 as the main control chip. Keywords CNC laser cutting machine tools XY table Single chip microcomputer
X X 大学 数控线切割机床运丝 装置的设计
目录 目录 .......................................................................................................................................... I 前言 (1) 1 数控电火花线切割加工的基本介绍 (3)
1.1数控电火花线切割加工 (3) 1.1.1电火花线切割起源 (3) 1.1.2 数控电火花线切割加工原理 (3) 1.1.3 数控电火花线切割正常加工必须具备的条件 (4) 1.1.4 数控电火花线切割加工的特点 (5) 1.1.5 数控电火花线切割的应用范围 (5) 1.2数控电火花线切割加工机床的特点 (6) 1.2.1数控电火花线切割加工机床的分类 (6) 1.2.2 数控电火花线切割加工机床的基本组成 (6) 2 机床主要参数的确定 (9) 2.1机床的主要技术参数 (9) 2.2确定储丝筒基本尺寸 (10) 2.3传动比的确定 (10) 2.4电动机的选择 (10) 2.5传动装置的运动参数设计 (12) 3齿轮副的设计计算 (15) 4 轴的设计计算及校核 (23) 4.1第Ⅰ轴的设计及校核 (23) 4.2第Ⅱ轴的设计及校核 (29) 4.3传动螺纹副的设计及校核 (35) 5 轴承寿命校核 (47) 5.1第Ⅰ轴上轴承的校荷 (47) 5.2第Ⅲ轴轴上轴承的校荷 (48) 6 键的强度校核 (50) 6.1联轴器处键的强度校荷 (50) 6.2储丝筒端盖与轴联接处键的校荷 (51) 6.3第Ⅰ轴与小齿轮联接处键的校核 (52) 6.4第Ⅲ根轴上键的校核 (53) 7 储丝筒的结构设计 (54) 结束语 (58) 致谢 (59) 参考文献 (61)