FMCS飞行管理计算机系统
- 格式:ppt
- 大小:3.89 MB
- 文档页数:319
飞行管理系统介绍一、飞行管理系统(FMC)组成和基本功用(一)、飞行管理系统(FLIGHT MANAGEMENT SYS)由五个分系统组成:1、飞行控制系统(DFCS)包括自动驾驶(A/P)和飞行指引(F/D),其核心为两台飞行控制计算机,该系统用于自动飞行控制(FCC)和飞行指引。
2、自动油门系统(A/T)其核心是一台自动油门计算机和两台发动机油门操纵的伺服机构,A/T 提供从起飞到着陆全飞行过程的油门控制。
3、飞行管理计算机系统(FMCS)其核心是一台飞行管理计算机FMC和两台控制显示组件CDU,它用于从起飞到进近的几乎全部飞行过程的横向(LATERAL)剖面和纵向(VERTICAL)剖面的飞行管理。
我部的34N型飞机装有两部FMCS,这使飞行管理系统的可靠性更高。
4、惯性基准系统(IRUS)其核心为两台惯导基准组件IRU,其主要功用为提供飞机的姿态基准和定位参数,也可用于飞机自备、远距导航。
5、电子飞行仪表系统(EFIS)33A和34N型飞机装备的是电子飞行仪表系统,3T0型飞机装备的还是旧式的机械式仪表。
由于飞行仪表的电子化,逐渐淘汰老式的机械式仪表,而电子飞行仪表必须有相应的字符,符号等图形信号发生器,以提供阴极射线管CRT或液晶LCD显示。
EFIS就是起这个作用的电子式飞行仪表显示系统,它主要包括两台符号发生器(EFIS SG)和两套姿态指引仪(EADI)、两套水平状态指示器(EHSI)。
(二)、飞行管理系统的基本作用:这套系统技术先进,设备量大,承担的任务多,其中最根本的功用是:1、实现飞行的自动化,大大减轻了飞行员的工作负担,减少人为操作所不可避免的差错和失误。
2、实现飞行全程的优化:(1)起飞阶段(TO)—根据飞机的全重和环境温度提供最佳目标推力。
(2)爬升降段(CLB)—提供最佳爬升剖面:包括爬升点,阶段爬升的设置,目标推力和目标空速的设定。
(3)巡航(CRZ)—提供最佳高度和巡航速度,以及大圆航线和导航系统的选择和自动调谐。
第一章1.什么是飞行管理系统?FMS的组成?并简述各组成部分之间的关系?飞行管理系统是由许多计算机,传感器,无线电导航系统,控制板,电子显示仪表,电子警告组件以及执行机构联系起来的大设备系统。
主要四大部分FMCS、IRS、AFCS、A/TFMCS-包括FMC和CDU,是系统中枢。
IRS是FMC基本传感器,向FMC提供2/3台IRU输出的导航数据,FMC进行加权平均,主要参数有PPOS、GS、TRK、WIND等AFCS是FMCS的执行部分,FMC对A/P、F/D、STB/TRIM、SPD/TRIM、A/T提供综合控制。
AFCS-MCP给FMC提供L NA V、V NA V制导衔接,选择目标空速、目标马赫数,FMC 向FCC提供经济目标空速、目标马赫数。
A/T是FMCS的执行部分,FMC通过FCC向A/T提供目标推力,从而控制飞行速度。
A/T 包括油门伺服机构(放大器、电机)和油门杆。
2.简述FMS在各飞行阶段中的性能功能。
起飞——飞行员通过FMCS的CDU输入飞机全重和外界温度,FMC进行计算,为飞机提供最佳起飞目标推力。
这个起飞目标推力使飞机在规定时间内达到起飞速度,不会损伤飞机发动机。
爬高——根据飞行员的选择和FMC确定的目标推力和目标速度,FMS提供最佳爬高剖面,(在规定的爬高速度和规定的发动机推力下,以最佳爬高角度到达规定的高度)。
FMC还根据情况向飞行员提供分段(阶梯)爬高和爬高顶点高度的建议,供飞行员选用。
这些建议一旦实施可使飞行进一步节省燃油。
巡航——FMS根据航线长短、航路情况等选定最佳巡航高度和最佳巡航速度。
在飞行的两机场之间采用大圆弧路径,结合无线电甚高频导航获得最优巡航飞行。
采用大圆弧路径使两点之间的飞行距离最短。
下降——FMS根据飞行员输入或储存的导航数据确定飞机开始下降的顶点。
飞机在下降阶段时,由FMS确定下降速度,最大限度地利用飞机的位能,节省燃油消耗。
进近——FMS在下降结束点,在既定高度、确定航距上,以优化速度引导飞机到跑道上的着陆点。

第16章飞行管理系统16、1飞行管理系统概述随着飞机性能得不断提高,要求飞行控制系统实现得功能越来越多,系统变得越来越复杂,从而迫使系统系统设计师们在可用得技术条件、任务与用户要求,飞机可用空间与动力,飞机得气动力特性及规范要求等诸因素得限制下,把许多分系统综合起来,实施有效得统一控制与管理。
于就是便出现了新一代数字化、智能化、综合化得电子系统-飞行管理系统(FMSFlight Management System)。
在1981年12月,飞行管理系统首次安装在B767型飞机上。
此后生产得大中型飞机广泛采用飞行管理系统。
16、2飞行管理系统得组成与功能16、2、1飞行管理系统得组成飞行管理系统由几个独立得系统组成。
典型得飞行管理系统一般由四个分系统组成,如图161,包括:(1)处理分系统-飞行管理计算机系统(FMCS),就是整个系统得核心;(2)执行分系统-自动飞行指引系统与自动油门,见自动飞行控制系统;(3)显示分系统-电子飞行仪表系统(EFIS),见仪表系统;(4)传感器分系统-惯性基准系统(IRS)、数字大气数据计算机(DADC)与无线电导航设备。
驾驶舱主要控制组件就是自动飞行指引系统得方式控制面板(AFDS MCP)、两部控制显示组件(CDU)、两部电子飞行仪表系统(EFIS)控制面板。
主要显示装置就是CDU、电子姿态指引仪(EADI)、电子水平状态指示器(EHSI)与推力方式显示。
各部分都就是一个独立得系统,既可以单独使用,又可以有多种组合形式。
飞行管理系统一词得概念就是将这些独立得部分组成一个综合系统,它可提供连续得自动导航、指引与性能管理。
图161飞行管理系统16、2、2飞行管理系统得功能FMS得主要功能包括导航/制导、自动飞行控制、性能管理与咨询/报警功能。
FMS实现了全自动导航,大大减轻了驾驶员得工作负担。
另外,飞机可以在FMS 得控制下,以最佳得飞行路径、最佳得飞行剖面与最省油得飞行方式完成从起飞直到进近着陆得整个飞行过程。
飞行管理计算机系统YE201目录标题章-节-标题页飞行管理计算机系统—介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . 34—61—00 . . . 1 概况介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 驾驶舱部件位置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 电子设备舱位置. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 FMC和CDU的电源接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 转换继电器电源接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 数字式输入接口—1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18 数字式输入接口—2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 数字式输出接口—1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 数字式输出接口—2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 CDU接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 FMC数据装载机接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 CDU数据装载机接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 模拟离散(值). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 状态信号器接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 程序销钉接口. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44 飞行管理计算机. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 飞行管理计算机—功能介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50 控制显示组件. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 控制显示组件—功能介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 控制显示组件—控制和显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60 机载数据装载机. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66 转换继电器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 FMC功能介绍—说明. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 FMC功能介绍—导航子功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 FMC功能介绍—性能子功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78 FMC功能介绍—制导子功能. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 FMC功能介绍—制导子功能—LNAV和VNAV方式逻辑. . . . . . . . . . . . . . . . . . . . . . . . 86 显示器—CDU —地面通电— 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90 显示器—CDU —地面通电— 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92第1页飞行管理计算机系统YE201目录标题章-节-标题页显示器—CDU —飞行前介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94 显示器—CDU —识别页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98 显示器—CDU —起始/基准索引页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102 显示器—CDU —位置页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104 显示器—CDU —航路页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108 显示器—CDU —离港/到达索引页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112 显示器—CDU —航段页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116 显示器—CDU —性能起始页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118 显示器—CDU —N1限制页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122 显示器—CDU —爬升页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 126 显示器—CDU —巡航页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128 显示器—CDU —下降页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130 显示器—CDU —进程/导航状态页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134 显示器—CDU —横向偏移页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140 显示器—CDU —导航基准页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142 显示器—CDU —等待页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146 显示器—CDU —导航台页. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150 显示器—CDU —信息. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152 显示器—CDS —飞行方式通告. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164 显示器—CDS —推力方式. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166 显示器—CDS —空速指示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 168 显示器—CDS —地图显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172 显示器—CDS —计划显示. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 174 培训知识点—FMC数据装载. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 176 培训知识点—CDU数据装载. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180 培训知识点—数据库装载. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184 培训知识点—FMCS BITE页—介绍. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 186 培训知识点—FMCS BITE页—BITE进入. . . . . . . . . . . . . . . . . . . . . . . . . . . . 190 培训知识点—FMCS BITE页—飞行中故障. . . . . . . . . . . . . . . . . . . . . . . . . . . . 194 培训知识点—FMCS BITE页—CDU测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . 198第2页飞行管理计算机系统YE201目录标题章-节-标题页培训知识点—FMCS BITE页—传感器. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200 培训知识点—FMCS BITE页—离散值. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204 培训知识点—FMCS BITE页—FMCS —固定的输出. . . . . . . . . . . . . . . . . . . . . . . . 208 培训知识点—FMCS BITE页—IRS监控. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 210 培训知识点—FMCS BITE页—性能系数. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212 培训知识点—FMCS BITE页—软件可选项. . . . . . . . . . . . . . . . . . . . . . . . . . . . 214 培训知识点—FMCS BITE页—飞机型号和发动机构型. . . . . . . . . . . . . . . . . . . . . . . . 216 培训知识点—FMCS BITE页—LCD CDU . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 218 培训知识点—FMCS BITE页—故障. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 220 培训知识点—FMCS BITE页—键测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224 培训知识点—FMCS BITE页—色彩测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226 培训知识点—FMCS BITE页—显示测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 228 培训知识点—FMCS BITE页—构型. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230 培训知识点—FMCS BITE页—软件可选项. . . . . . . . . . . . . . . . . . . . . . . . . . . . 232 培训知识点—FMCS BITE页—电源. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234 培训知识点—FMCS BITE页—温度传感器. . . . . . . . . . . . . . . . . . . . . . . . . . . . 236 培训知识点—FMCS BITE页—光线传感器. . . . . . . . . . . . . . . . . . . . . . . . . . . . 238 培训知识点—FMCS BITE页—灯测试. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240 培训知识点—FMCS BITE页—校准. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242 系统小结. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244第3页飞行管理计算机系统 — 介绍本页空白34—61—00—001 R e v 10 01/26/2000飞行管理计算机系统 — 介绍概述飞行机组使用飞行管理计算机系统(FMCS )输入一次飞行的航路和垂直性能飞行计划数据。
FMCS即飞行管理计算机系统第一章1.什么是飞行管理系统?FMS的组成?并简述各组成部分之间的关系?飞行管理系统是由许多计算机,传感器,无线电导航系统,控制板,电子显示仪表,电子警告组件以及执行机构联系起来的大设备系统。
主要四大部分FMCS、IRS、AFCS、A/TFMCS-包括FMC和CDU,是系统中枢。
IRS是FMC基本传感器,向FMC提供2/3台IRU输出的导航数据,FMC进行加权平均,主要参数有PPOS、GS、TRK、WIND等AFCS是FMCS的执行部分,FMC对A/P、F/D、STB/TRIM、SPD/TRIM、A/T提供综合控制。
AFCS-MCP给FMC提供L NA V、V NA V制导衔接,选择目标空速、目标马赫数,FMC 向FCC提供经济目标空速、目标马赫数。
A/T是FMCS的执行部分,FMC通过FCC向A/T提供目标推力,从而控制飞行速度。
A/T 包括油门伺服机构(放大器、电机)和油门杆。
2.简述FMS在各飞行阶段中的性能功能。
起飞——飞行员通过FMCS的CDU输入飞机全重和外界温度,FMC进行计算,为飞机提供最佳起飞目标推力。
这个起飞目标推力使飞机在规定时间内达到起飞速度,不会损伤飞机发动机。
爬高——根据飞行员的选择和FMC确定的目标推力和目标速度,FMS提供最佳爬高剖面,(在规定的爬高速度和规定的发动机推力下,以最佳爬高角度到达规定的高度)。
FMC还根据情况向飞行员提供分段(阶梯)爬高和爬高顶点高度的建议,供飞行员选用。
这些建议一旦实施可使飞行进一步节省燃油。
巡航——FMS根据航线长短、航路情况等选定最佳巡航高度和最佳巡航速度。
在飞行的两机场之间采用大圆弧路径,结合无线电甚高频导航获得最优巡航飞行。
采用大圆弧路径使两点之间的飞行距离最短。
下降——FMS根据飞行员输入或储存的导航数据确定飞机开始下降的顶点。
飞机在下降阶段时,由FMS确定下降速度,最大限度地利用飞机的位能,节省燃油消耗。
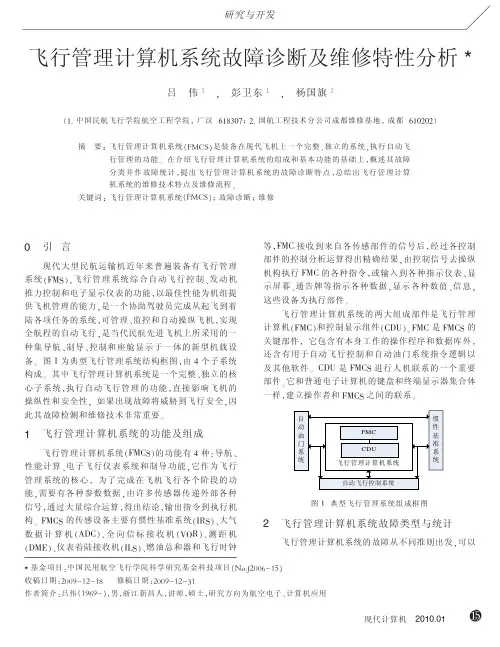
现代计算机2010.01飞行管理计算机系统故障诊断及维修特性分析*吕伟1,彭卫东1,杨国旗2(1.中国民航飞行学院航空工程学院,广汉618307;2.国航工程技术分公司成都维修基地,成都610202)摘要:关键词:飞行管理计算机系统(FMCS );故障诊断;维修*基金项目:中国民用航空飞行学院科学研究基金科技项目(No.J2006-15)收稿日期:2009-12-18修稿日期:2009-12-31作者简介:吕伟(1969-),男,浙江新昌人,讲师,硕士,研究方向为航空电子、计算机应用飞行管理计算机系统(FMCS )是装备在现代飞机上一个完整、独立的系统,执行自动飞行管理的功能。
在介绍飞行管理计算机系统的组成和基本功能的基础上,概述其故障分类并作故障统计,提出飞行管理计算机系统的故障诊断特点,总结出飞行管理计算机系统的维修技术特点及维修流程。
引言现代大型民航运输机近年来普遍装备有飞行管理系统(FMS ),飞行管理系统综合自动飞行控制、发动机推力控制和电子显示仪表的功能,以最佳性能为机组提供飞机管理的能力,是一个协助驾驶员完成从起飞到着陆各项任务的系统,可管理、监控和自动操纵飞机,实现全航程的自动飞行,是当代民航先进飞机上所采用的一种集导航、制导、控制和座舱显示于一体的新型机载设备。
图1为典型飞行管理系统结构框图,由4个子系统构成。
其中飞行管理计算机系统是一个完整、独立的核心子系统,执行自动飞行管理的功能,直接影响飞机的操纵性和安全性,如果出现故障将威胁到飞行安全,因此其故障检测和维修技术非常重要。
1飞行管理计算机系统的功能及组成飞行管理计算机系统(FMCS )的功能有4种:导航、性能计算、电子飞行仪表系统和制导功能,它作为飞行管理系统的核心,为了完成在飞机飞行各个阶段的功能,需要有各种参数数据,由许多传感器传递外部各种信号,通过大量综合运算,得出结论,输出指令到执行机构。
FMCS 的传感设备主要有惯性基准系统(IRS )、大气数据计算机(ADC )、全向信标接收机(VOR )、测距机(DME )、仪表着陆接收机(ILS )、燃油总和器和飞行时钟等,FMC 接收到来自各传感部件的信号后,经过各控制部件的控制分析运算得出精确结果,由控制信号去操纵机构执行FMC 的各种指令,或输入到各种指示仪表、显示屏幕、通告牌等指示各种数据,显示各种数值、信息,这些设备为执行部件。
飞行管理计算机系统FMCS分类:学习笔记2006.2.20 02:32 作者:metar | 评论:3 | 阅读:6905飞行管理计算机系统FMCS飞行管理计算机系统18.1 飞行管理系统(FMS)18.2 飞行管理计算机系统18.3 飞行管理计算机数据库18.4 控制显示组件(CDU)18.1 飞行管理系统(FMS)18.1.1 FMS概述飞行管理系统综合了以前一些飞机电子设备的功能并加以发展扩大,使设备的自动化程度更高.飞行员通过FMCS操纵飞机显得非常简单,方便.这样,可以让飞行员腾出更多的时间更安全地管理飞机的飞行.飞行员只要向飞行管理计算机输入飞机的起飞机场,目的地机场并规定飞行航路,亦即要在起飞和目的地机场之间起码规定一个航路点,FMCS就能根据IRS和无线电导航设备的信号准确地计算出飞机在飞行中的图时位置,根据计算发出指令到AFCS的自动驾驶仪或飞行指引系统,引导飞机从起飞机场到目的地机场.同样,飞行员只要通过FMCS的控制显示组件(CDU)输入飞机的起飞全重以及性能要求,FMCS就能计算从起飞机场到目的地机场飞行的最经济速度和巡航高度,也能连续计算推力限期值.送出指令到自动驾驶和自动油门系统.FMCS是用当时飞机所在的位置,飞机性能参数,目的地机场的经纬度和可用跑道,各航路点,无线1电导航台以及等待航线,进近程序等信号或数据进行综合分析运算,以确定飞机的航向,速度以及爬高,下降角度和升降速度,阶梯爬高和下降等指令,来计划飞机飞行的水平相垂直剖面.区域导航使用大圆弧航路使之在远距离航行中获得比惯常航路更短的直接航路.由于飞行员起飞前在FMCS的CDU上选择了最适应飞行要求的性能数据,FMC根据要求的性能数据和其他参数进行运算,就可获得最佳经济效果和航路计划.当然,在一些情况下.如在预定航路上有恶劣气象条件,飞行员也可通过CDU来修改原定航路.使用未安装FMCS的飞机飞行时,飞行员必须参考地图,飞机性能手册,航图,各种图表和计算器,以此获得导航和性能的信息数据.现在这些数据都存储在FMC内.FMC内存储的与杰普逊航图一样的数据,称为导航数据库.飞行员使用CDU与FMC通信,可以很容易地调用计算机内所储存的各种信息数据,用于飞行的各种性能数据在CDU上显示出来,还能在水平状态指示器(HSI)上显示.飞机上装了FMCS后,实现了全自动导航,不但大大减轻了飞行员的工作负担,提高了飞机操作的自动化程度,更主要的是FMC能提供从起飞到进近着陆的最优侧向飞行轨迹和垂直飞行剖面.FMS的作用飞机性能数据计算/管理,飞机导航数据计算/管理,对飞机进行最佳纵向/横向剖面的导航和制导,起到节油/节时,降低运营成本的功能.飞机可以在FMS的控制下,以最佳的飞行路径从起飞机场飞到目的地机场,以最佳的飞行剖面,最省燃油的方式飞行.这种优化功能体现于FMS的导航,制导和显示功能之中.FMCS在各飞行阶段中优化性能的功能可用图18—1来说明.图18—1 FMCS在个飞行阶段的性能功能FMCS在各飞行阶段中优化性能的功能1,起飞飞行员通过FMCS的CDU转入飞机全重(或无燃油重量)和外界温度,FMC进行计算,为飞机提供最佳起飞目标推力.这个起飞目标推力使飞机在规定时间内达到起飞速度,不会损伤飞机发动机,保证起飞安全.2,爬高2根据飞行员的选择和FMC确定的目标推力和目标速度,FMCS提供最佳爬高剖面,也就是在规定的爬高速度和规定的发动机推力下,以最佳爬高角度到达规定的高度.FMC还根据情况向飞行员提供分段(阶梯)爬高和爬高顶点高度的建议,供飞行员选用.这些建议—一旦实施可使飞行进一步节省燃油.3,巡航FMCS根据航线长短,航路情况等选定最佳巡航高度和巡航速度.在飞行的两机场之间采用大圆弧路径,结合无线电甚高频导航获得最优巡航飞行.采用大圆弧路径使两点之间的飞行距离最短.4,下降FMCS根据飞行员输入或储存的导航数据确定飞机开始下降的顶点.飞机在下降阶段时,由FMCS确定下降速度,最大限度地利用飞机的位能,节省燃油消耗.5,进近FMCS在下降结束点,在既定高度,确定航距上,以优化速度引导飞机到跑道上的着陆点.FMCS以最佳飞行路径操纵飞机,不但安全,可靠,而且使飞机节省了燃油,缩短了飞行时间,大大降低了飞行成本.FMCS起飞/爬升/巡航/下降/进近时,各提供什么信息起飞——CDU引入飞机全重,设定温度,FMC计算出最佳目标能力,目标速度爬高——FMC提供最佳爬高剖面,即最佳爬升角和速度,阶梯爬升到爬升顶点巡航——根据航路距离,航路情况,FMC确定最佳巡航高度和速度下降——FMC确定下降顶点,计算出最佳下降高度,控制油门在慢车位,利用飞机性能,以最佳剖面和速度下降进近——FMC确定下降末端(下降结束点),即在规定的高度和距离开始进近到跑道上的着陆点18.1.2 各分系统的功用及组成现代飞机上FMS是一个由许多计算机,传感器,无线电导航系统,控制板,电子显示仪表,电子警告组件以及执行机构联系起来的大设备系统,见图18—2所示.图18—2 FMC部件图18—3 FMS的基本组成典型的FMS主要是由四个分系统组成的.FMCS,3IRS,AFCS,A/T.FMCS在其中扮演着重要角色,是系统的中枢.FMCSFMCS由FMC和CDU组成.FMC一般安装在飞机的电气电子设备舱的设备架上.根据需要,有的飞机上安装一台,而在有的飞机上却装有两台,一台主用,一台备用.CDU为便于操作使用,都安装在驾驶舱靠近正,副驾驶员的中央操纵台的前方.CDU在飞机上一殷安装两台.分别供正,副驾驶员操纵使用;也可根据用户的要求只安装一台或三台.IRSIRS好像是FMS的一个大传感器,它向系统提供飞机的位置,姿态等数据信息.IRS是一个独立的惯性导航系统,这个系统由两台或三台惯性基准组件(IRU),方式选择板(MSU)和惯性系统显示组件(ISDU)等组成.IRU内装有激光陀螺和加速度计,安装在电气电子设备舱里.MSU和ISDU连在一起装在驾驶舱头顶设备板上.飞行员可以通过MSU选择IRS的工作方式.选择的几种方式是:导航,姿态,校准和关闭.其上也有校准和故障信息的信号显示.ISDU上装有显示选择电门.左,右显示窗和字母数字键盘等.飞行员可在上面选择显示飞机的位置经纬度,航向,风向,风速等数据,也可通过键盘对惯性基隧系统进行起始校准.AFCSAFCS是FMS的执行系统,它对自动驾驶,飞行指引系统,安定面配平,自动油门等提供综合控制.AFCS的核心由两台或三台飞行控制计算机(FCC),一个方式控制板(MCP)以及一些其他部件组成.FCC接收来自飞机各传感器的信号,根据要求的飞行方式对这些信号进行处理,并产生输出指令去操纵副翼,水平安定面,升降舵等控制舵面.它们装在飞机电气电子设备舱的设备架上.MCP安装在正,副驾驶员正前方的驾驶舱遮光板上,它提供飞行员与AFCS之间的联系.飞行员通过MCP进行自动驾驶衔接控制,工作方式迭择控制以及与自动驾驶,飞行指引和FMCS有关的控4制数据的选择等.要说明的是,自动油门的控制也在其上进行.A/T自动油门系统(A/T)也是FMS的执行部件.有一台装在电气电子设备舱的自动油门计算机,它接收来自各传感器和MCP上来的工作方式相性能选择数据,把它们进行运算处理,输出操纵指令到油门机构去.油门机构主要由伺服电动机和油门杆组成,它执行操纵指令,把油门杆置于恰当的位置.上述四个主要组成分系统又都是可以独立工作的,分别执行各自独立的功能.这样就保证在系统中任一分系统的故障不会引起FMS的全部失效.18.1.3 各分系统之间的信号交连关系一,总述二,数字输入三,离散信号输入四,离散信号输出一,总述FMC接收来自多个传感器和飞行管理系统里的其它系统的数字和离散信号.FMC完成飞机飞行和性能系统所要求的算术逻辑和输入/输出处理.FMC的输出是ARINC429数字格式.FMC的最基本六个传感器-IRS,ADC,VOR/DME,ILS,FAU,CLK二,数字输入CDU提供机组与FMC的接口连接.CDU还用于选用的侧向制导惯性基维系统(IRS),它是飞机上进行姿态测量和位置测定的主要部件.每个惯性基准组件(IRU)都通过ARINC29总线结FMC提供现在位置,航向,姿态,速度,地速和升降速度信息.两个数字式大气数据计算机(DADC)都与FMC接口.每个DADC都通过ARINC429总线给FMC提供:高度,空速,马赫数(M)和温度信息.时钟给FMC提供GMT(格林威治平均时).数字飞行控制系统(DFCS)的MCP (方式控制板)给FMC提供:LNAV(侧向导航)和VNAV(纵向导航)衔接方式逻辑,所选高度数据等信息.5二,数字输入燃油加法组件通过DAA提供燃油量信息.测距机(DME)询问机通过DAA给FMC提供距离信息.VHF导航接收机通过DAA给FMC提供距离和方位信息.数据装载机插头提供外部手提数据装载机与FMC的接口.数据装载机用来更新FMC的导航数据库,它通过接口与输入/输出数据总线相接.三,离散信号输入FMC接收来自机翼防冰,发动机防冰和发动机引气系统来的离散输入信号.这些系统工作时,会引起发动机推力下降.FMC利用这些离散信号对计算的性能值作出相应的调整.四,离散信号输出当FMC警告信息出现在FMC,CDU上时或当FMC失效时,FMC在自动飞行状态指示器上的一个琥珀色警告灯亮.五,数字输出FMC数据发送器把数据输回到CDU(或ANCDU).FMC通过DAA将N1限制信息输给主发动机显示器上的N1指示器.FMC还对VHF NAV系统调谐.调谐信息通过相应的DAA送给两个VHF NAV系统.FMC给IRS提供飞机现在位置的经/纬度输出.现在位置用于起始IRS,经纬度在FMC的CDU(或ANCDU)上输入.FMC还为IRS姿态方式提供设置航向.五,数字输出数字式失速警告计算机接收来自FMC的总重量信号.FMC给主发动机显示器上的TMA(推力方式通告)提供实际的N1限制信息.FMC的输出与DFCS的飞行控制计算机(FCC)接口,FMC的这些输出给FCC提供目标空速和马赫数,目标高度,目标升降速度和倾斜指令.如DFCS在VHAV方式,则目标空速指标指示FMC的目标空速.FMC给用于EHSI和EADI(电子水平状态指示器和电子姿态指引仪)显示的字符发生器提供导航,制导和导航背景致据.18.2 飞行管理计算机系统618.2.1 FMCS的功用及系统组成18.2.2 FMC的输入信号及其特性,信号接口关系18.2.3 FMC 的导航计算的基本原理18.2.1 FMCS的功用及系统组成飞行管理计算机硬件是多微机系统,FMC的基本组成部分:导航处理机,性能处理机,I/O处理机,电源.如波音747—400型飞机FMC,其CPU采用的是LS-54IIIB和T19989型,这三个处理机共有l9块电路板,其中A1-A8为输入/输出处理机,A9-A15为导航处理机,A16-A19为性能处理机,所有的电路板都采用插入式连接.18.2.1 FMCS的功用及系统组成计算机数据运算可用定点制和浮点制.若用定点制,用整数补码运算,若用浮点制,有25位尾数,7位阶来表示.数据流为16位并行.结构字长为16位和32位.程序存储器是半导体型可用紫外线擦除的可编程序只读存储器EPROM.导航处理机的程序存储器容量为192K字,字长16位;性能处理机的为48K字;输入/出处理机为32K字.最大存取时间为700纳秒.便笺存储器和数据库存储器都是CMOS器件.早期生产的FMC使用硬盘存储器,而新型FMC使用磁泡(MAGNET1C BUBBLE)存储器.磁泡存储器体积小,存储容量大,因此,装有磁泡存储器的FMC有时被称为AFMC(ADVANCED FMC).18.2.1 FMCS的功用及系统组成计算机内电源系统有过流和短路保护,当内部温度超过规定值时,由热敏电路进行热敏关断保护.数字数据传始采用ARINC一429格式,输入有28个通道,输出为12个通道.开路/接地离散信号有52个输入通道,3个输出通道.另外还有27个晶体管-晶体管集成电路离散信号转入通道.计算机内部的导航处理机,性能处理机和输入/输出处理机在工作中是互相独立的,它们各自执行自己的功能,每一个运算装置使用相同的并行地址数据总线.由于三个处理机之间在结构上互相没有联系,所以一个部件丧失功能并不会影内到其他部件的工作.各计算部件之间的通信是通过7公共存储器和内部处理器中断进行的.下面我们分别把计算机内这三台微处理机的工作做一简要说明.一,导航处理机部分导航处理机部分由导航微处理器和它的存储器组成.导航处理器执行与导航计算,侧向和纵向操作指令计算和CDU管理等有关功能;控制和协调所有导航部分元件的工作;传输导航信息.导航处理器执行一套微程序指令.整个微程序指令共有1K字,每个字为56位,固化在半导体只读存储器(PROM)中.导航处理器由A14,A15两块电路板组成.其中含有一个16位的运算器和逻辑部件,一个24位的复合组件,包括输出接口,数据损入输出接口,一个串行始入输出接口,16级优先中断以及有关的定时和控制电路.一,导航处理机部分导航处理机部分共有4种存储器.电路板A13是导航程序存储器,这个程序既有指令也有操纵计算机所必需的固定数据.存储器包含有l92K字的16位电可编程序只读存储器(EPROM),地址输入缓冲器,数据输出缓冲器以及控制电路.该EPROM可由紫外线擦除,再由电信号重新编程.一,导航处理机部分电路板A12是易失性读写存储器,用来作为导航处理机的"便笺".该组件板内有字长16位的容量为16K字的高速随机存取存储器(HS RAM),地址输入缓冲器,数据输入输出缓冲器和控制电路.电路板A10和A11内含有导航数据库.每一块组件由字长16位,容量为48K字的写入保护非易失性随机存储器(NV RAM),地址输入缓冲器,数据输出缓冲器和控制电路等组成.电路板A9含有保护便笺存储器,该存储器为字长16位,容量为48K字的非易失性随机存储器(NV RAM).此外,电路板上还有地址输入缓冲器,数据输入输出缓冲器和控制电路等.二,性能处理机部分性能处理机部分也由性能处理器和存储器构成.它的基本构造与导航处理机部分相同,只是它的存储器的容量较小.电路板A17上除有程序存储器外,还有便笺存储器,高速RAM.性能处理器:根据传感器输入,CDU输入及性能数据库的数据进行计算,实现最佳纵向飞剖面的管理,包括飞行高度,速度,爬升/下降速率等,并提供显示.8三,输入输出处理机部分输入输出处理机部分除有处理器,各种存储器外,还有混合输入输出装置,ARINC控制器,ARINC接口,离散信号接口等组件.18.2.2 FMC的输入信号及其特性,信号接口关系FMC从不同的数据源接收数字格式的数据,并将它们从新格式化为ARINC429格式.其接口关系如图18—4.图18—4 信号接口关系18.2.3 FMC 的导航计算的基本原理导航就是有目的地,安全有效地引导飞机从一地到另一地的飞行横向控制过程.导航要从起飞机场开始,根据要飞抵的目的地选择航线;确定离目的地或某个要飞越的航路点的距离,预定到达时间,确定速度等.导航系统需要解决的三个主要问题是:如何确定飞机当时的位置;如何确定飞机从一个位置向另一个位置前进的方向;如何确定离地面某一点的距离或速度,时问.从根本上说,导航就是给飞行员提供飞机飞行中的位置,航向,距离和地速等导航参量.在这一节中我们仅涉及到这些基本问题.18.2.3 FMC 的导航计算的基本原理但是在现代航空中,由于飞机飞行速度的提高,航空交通的日益拥挤,客观上要求飞机的导航系统除确定上述几个基本参量以及其他一些参量以外,还要有连续的,适时的操纵指令输出.飞机上由于装载了许多由计算机所组成的控制装置,可以便操纵指令传输到自动飞行控制系统和自动油门系统.速度指令输送到自动油门系统,产生飞机纵向加速度以达到事先确定的飞行速度.输送到自动飞行控制系统的指令有的是产生侧向加速度以改变飞机的航迹,有的产生垂直加速度以使飞机爬高或下降.在整个飞行过程中,自动操纵飞机由起飞机场按预定航线,以经济的方式飞向目的地.18.2.3 FMC 的导航计算的基本原理飞行管理系统的导航功能已把早期的惯性导航,无线电导航和仪表着陆系统功能结合在一起,由9它提供一个综合导航功能.飞机在起飞以前只要把飞机当时所处的经纬度通过CDU或直接通过IRS控制显示装置输入到IRS的计算机去,整个系统就开始工作.飞机起飞以后,无线电导航系统开始工作,并和IRS的信号相结合,一直到飞机降落到跑道上.在整个飞行阶段,都由FMS进行计算,操纵,并在有关的显示设备上给飞行员指明飞机当时所处准确位置,飞行速度和飞机飞行高度等飞行动态数据.18.2.3 FMC 的导航计算的基本原理飞机从北京飞济南为例.假设北京的位置为P,济南的位置为Z.北京到济南段的理论航线是PZ.飞机的应飞航向ψP.假定飞机在飞行过程中偏离PZ线而飞到了A点.怎样引导飞机准确地飞达济南一种方法是操纵飞机回到PZ线,另一种方法是连接AZ线,重新确定飞机的应飞航向ψA,使飞机沿着AZ线飞达济南.如果我们采用后一种导航方法,就要求飞机在整个飞行过程中不断地计算出飞机的当时坐标位置(经纬度)以及飞机的应飞航向ψA,并要不断测定飞机的实际航向ψr.图18—5 导航原理说明18.2.3 FMC 的导航计算的基本原理对于这样的导航方法,FMC需要完成下列计算;1,根据IRS和无线电导航设备的信号,计算飞机在任何瞬时的准确坐标位置度λA和纬度φ.2,飞机在任何瞬时的应飞航向ψA以及航向误差Δψ.3,飞机在任何瞬时经下面一系列航路点以及到终点的待飞距离D.4,按现有速度计算预计到达时间(ETA).18.2.3 FMC 的导航计算的基本原理在有风飞行时,IRS算出地速Vg,偏流角β以及飞机的实际航向ψr,从大气数据计算机得到真空速V.地速Vg,空速V和风速W组成一个速度三角形,见图18—6.由图示几何关系,可以求得风速W和风向δ:10图18—6 速度向量图18.2.3 FMC 的导航计算的基本原理飞机在飞行中任何瞬时的坐标经纬度由IRS计算,也由FMC(根据无线电信号和IRS信号进行)计算,飞机应飞航向ψr和待飞距离D也有许多种计算方法,这里列出一种简单的计算法(适用于Δλ<2°=.见图l8-8所示.18.2.3 FMC 的导航计算的基本原理FMC计算得到的许多参数除在CDU和电子飞行仪表上显示供飞行员检查观察外,更主要的是与自动飞行控制系统耦合,根据飞机的航向误差Δψ,再通过FCC处理计算,把它变为舵面(副翼,方向舵)偏转指令,通过舵面的操纵改变飞机的横向飞行姿态.当飞机姿态改变以后,FMCS的各传感器的输入量Vg,V,ψr,φA,λA等也随之变化,计算机对新的输入量重复上述计算,取得新的计算结果,引导飞机飞向下一航路点.它是一个闭环自动控制系统.18.2.3 FMC 的导航计算的基本原理导航功能的数据管理和计算是由计算机内的软件来操作的,它主要包含下列几方面的功能.1,导航数据库管理导航数据库由用户通过数据库装载机装入计算机的存储器内.数据库管理程序包含接受计算机内各电路运行要求,调用寻址,调用数据等.18.2.3 FMC 的导航计算的基本原理2,位置计算把飞机无线电导航接收机所接收到的地面无线电信号和IRS产生的信号进行综合计算,以获得最高的准确性.无线电位置数据选择的优先顺序为:(1)DME/DME:两个不同位置的DME台;(2)DME/VOR:当只能收到一个有效DME台的信号时,使用共址的VOR台;(3)ILS:正在进行仪表进近着陆时,使用ILS的偏离信号;(4)仅用IRS导航:在空中,不能接收到有效的无线电导航信号时或飞机在地面不能使用无线电导航信号时使用.1118.2.3 FMC 的导航计算的基本原理3,速度计算FMC速度计算主要使用由IRS来的南北,东西速度分量进行地速和风速计算.这是由惯性基准系统内的三个轴向加速度计对三个轴向进行积分而获得的.FMC计算合成速度,再与由ADC来的空速结合起来进行风速计算.4,高度计算对IRS立轴加速度计的飞机垂直加速度进行两次积分就作为基本的飞机高度数据.这个数据再由从大气数据计算机输来的气压信号进行修正.未经气压修正的高度为原始高度,经修正后的高度称为气压修正高度.高度计算时,若IRS无法提供高度数据,那么,计算机的自动补缺方式是选择相应的ADC数据.18.2.3 FMC 的导航计算的基本原理5,导航设备的选择和调谐导航数据库内储存着各导航台数据.在EFIS所提供的飞机当时位置附近的20个导航台清单中,选择2个最佳导航台,并对这2个选定的导航台进行自动调谐,以获得这2个导航台的无线电导航位置数据.若无法获得2个合适的DME导航台,则选择离开飞机当时位置最近的DME/VOR导航台的距离和方位数据.把飞机上的无线电导航接收机的接收频率调到选定的地面导航台的使用频率上.18.3 飞行管理计算机数据库FMC的存储器内除存储有各种操作程序以外,还包含有许多数据.这些数据也是FMC正常发挥它的功能所不能缺少的.当操作者通过CDU选择飞行控制的各种工作方式,选择各种航路结构时,就需要使用这些数据;FMC在进行各种数据计算时,也需要这些数据.按数据的种类分类,与飞机性能有关的各种参数集中存储起来,称为性能数据库.这些数据是固定不变的,不能进行更改,但不同机型其性能数据库不同.飞机导航方面的数据称为导航数据库.导航数据库需要每隔28天更换一次.这些数据都储存在计算机的磁盘存储器或半导体存储器或磁泡存储器内.18.3 飞行管理计算机数据库18 .3 .1 导航数据库的内容1218 .3 .2 导航数据库的更新18 .3 .3 性能数据库18.3.1 导航数据库的内容数据库内的数据是飞机飞行区域的机场,航路点,导航台的地理位置,频率以及航路组成结构等.这些数据可以分成两大类,一类是对各航空公司都适用的标推数据,它们由世界范围的机场,导航台等有关数据组成.另一类导航数据是一种特定数据,仅是与航空公司飞行航线的航路结构有关的数据.这两类数据由导航数据库制造中心汇集后,首先按ARINC一424格式进行编码,然后送入特别的计算机进行处理,再制成DC一300式盒式磁带或其它形式的媒质,包装后分发到航空公司,每隔28天用数据装载机把数据库装到飞机的FMC内,进行数据更新.导航数据库产生和装载过程见图18—9所示.图18—9 导航数据库产生和装载过程导航数据库导航数据库所存具体内容由以下6个方面的资料组成:一,导航设备二,机场三,航路四,公司航路五,终端区域程序六,ILS进近导航数据库一,导航设备(1)导航设备类别:导航台可分为测距机(DME)台,全向信标(VOR)和测距机(DME)装在一起的VOR/DME台,其VOR的频率也可用特高频(UHF)的塔康(TA—CAN)台.(2)位置:所有导航台在地球上的位置,都用经纬度来表示.(3)频率:各导航台的使用频率.(4)标高:各导航台所在位置的海拔高度.(5)识标:各导航台以3个英文字母作为各自的识别标志.13。

浅析飞行管理系统的导航功能随着现代航空科学技术飞速的发展,计算机己进入各航空领域。
飞行管理系统己经成功地应用在多种飞机的商业飞行中,表现出了优越的性能。
导航系统作为FMS的一个子系统,在其中发挥着十分重要的作用。
在当前的FMS中,常规的无线电区域导航同其它一些导航方式相结合取得了很好得效果,确保了飞行的安全、舒适、快捷。
1飞行管理系统的组成现代飞机上的FMS是一个由许多计算机、传感器、无线电导航系统、控制板、电子显示仪表、电子警告组件以及执行机构联系起来的设备系统。
典型的FMS主要由4个系统组成:飞行管理计算机系统,自动飞行控制系统,自动油门系统,传感器系统。
这四个系统可以独立工作,这样保证当系统中任一部分系统的故障不会引起FMS 的全部失效。
1.1飞行管理计算机系统(FMCS)FMCS由飞行管理计算机(FMC)和控制显示组件(CDU)组成,负责协调、处理并控制其它系统的工作。
现在一般的飞机为确保FMS的可靠性都装有两台,一台主用,一台备用。
CDU为便于操纵都安装在驾驶舱靠近正、副驾驶的中央操纵台前方。
1.2自动飞行控制系统(AFCS)AFCS是FMS的操作系统,它对自动驾驶、飞行指引系统、速度\马赫配平等提供综合控制。
它由两台或三台飞行控制计算机(FCC)、一个方式控制而板(MCP)以及一些其它部件组成。
FCC接受来自飞机各种传感器的信号,根据要求的飞行方式对信息进行处理,并产生输出指令去操纵副翼、安定面、升降舵等控制面。
1.3自动油门系统(A/T)自动油门系统包括自动油门计算机和自动油门伺服机构。
自动油门计算机接收来自各传感器和MCP上来的工作方式和性能选择数据, 计算处理后,输出操纵指令到油门机构去。
1.4传感器系统传感器包括惯性基准系统(IRS)、大气数据计算机(ADC)、测距仪(DME)、全向信标(VOR)、全球定位系统(GPS)、仪表着陆系统(ILS)以及燃油总和器和飞行时钟等。
这一系统将实测的飞行、导航的大气数据传输给FMS的计算机系统。
飞行管理计算机系统(二)引言概述:飞行管理计算机系统(FMCS)是一种集成的航空电子设备,用于飞机的飞行管理和控制。
它通过提供自动化的飞行指导、导航和性能计算等功能,提高了飞行的效率和安全性。
本文将介绍飞行管理计算机系统的五个主要方面,包括导航功能、性能计算、飞行计划管理、仪表显示和故障管理。
正文:一、导航功能:1. 提供精确的位置信息,包括经度、纬度和海拔高度。
2. 可以进行自动航路规划和路线优化。
3. 提供导航图显示和总体航行显示功能。
4. 支持雷达地图、电子地图和气象信息的显示。
5. 提供导航指引,如航向指示、航迹保持和垂直引导等。
二、性能计算:1. 将飞机的性能参数输入系统,如速度、高度和载荷等。
2. 根据这些参数计算最佳的爬升和下降速度。
3. 可以进行燃油消耗和剩余燃油计算。
4. 能够计算最佳的巡航高度和速度。
5. 提供性能优化建议,并进行实时更新。
三、飞行计划管理:1. 提供飞行计划的输入和修改功能。
2. 支持航路、航段和航路点的管理和编辑。
3. 可以进行飞行计划的性能分析和验证。
4. 提供飞行计划的实时监控和调整能力。
5. 提供备降机场和紧急情况下的替代航线计算和选择。
四、仪表显示:1. 显示飞机的关键参数,如空速、高度和航向。
2. 支持人工和自动驾驶仪的操作和显示。
3. 提供危险警告和警报的显示。
4. 可以显示附近的航空器和地形信息。
5. 支持航向和上升/下降角度的精确指示。
五、故障管理:1. 监控飞行系统的状态和性能。
2. 提供故障诊断和排除建议。
3. 支持系统故障的自动隔离和备份。
4. 可以进行故障历史记录和故障趋势分析。
5. 提供故障修复建议和计划。
总结:飞行管理计算机系统(FMCS)在飞机的飞行管理和控制中起到关键作用。
它具有导航功能、性能计算、飞行计划管理、仪表显示和故障管理等五个主要方面。
这些功能和特性提供了航空器的自动化和智能化,可以提高飞行的效率和安全性,减轻飞行员的工作负担,并提供及时准确的飞行信息和指引。
飞行管理计算机系统(一)引言概述:飞行管理计算机系统(Flight Management Computer System,简称FMC)是现代飞机中的重要组成部分,它集成了多种功能,如飞行导航、性能计算和飞行管理等,为飞行员提供了准确的飞行数据和操作指导。
本文将介绍飞行管理计算机系统的基本原理、飞行导航功能、性能计算功能、飞行管理功能以及未来发展趋势。
正文内容:一、飞行管理计算机系统的基本原理1. FMC的基本组成和工作原理2. 飞行管理计算机系统的功能和作用3. FMC与其他飞行电子设备的关系4. FMC的数据输入和输出方式5. 飞行管理计算机系统的安全性和可靠性二、飞行导航功能1. 导航数据库的管理和更新2. 姿态和位置信息的获取3. 航路规划和飞行计划优化4. 自动导航和航路控制5. 风险管理和障碍物避免功能三、性能计算功能1. 高度、速度和燃油优化计算2. 起飞性能和着陆性能计算3. 飞行耗油量和续航能力预测4. 大气条件和飞机参数的调整计算5. 大气现象的预测和影响分析四、飞行管理功能1. 航班管理和航班计划安排2. 航线修正和航班保障考虑3. 飞行时间和到达时间的预测4. 飞行员与地面交流的接口5. 飞行数据记录和汇总分析五、未来发展趋势1. 自动化和智能化技术的应用2. 数据网络和通信技术的改进3. 人机界面的优化和改善4. 飞行管理计算机系统与无人驾驶飞机的结合5. 环境保护和能源效率的考虑总结:本文详细介绍了飞行管理计算机系统的基本原理、飞行导航功能、性能计算功能、飞行管理功能以及未来发展趋势。
飞行管理计算机系统在现代飞机中起到了至关重要的作用,它不仅提供了飞行数据和操作指导,还大大提高了飞行的安全性和效率。
随着技术的不断进步和发展,飞行管理计算机系统将会越来越智能化和自动化,为航空产业带来更大的发展潜力。