avr舵机控制程序
- 格式:docx
- 大小:37.50 KB
- 文档页数:3
![arduino编程措辞[精华]](https://uimg.taocdn.com/099e565226284b73f242336c1eb91a37f11132b7.webp)
arduino 编程措辞[精华]Arduino语言注解Arduino语言是建立在C/C++基础上的,其实也就是基础的C语言,Arduino语言只不过把AVR单片机(微控制器)相关的一些参数设置都函数化,不用我们去了解他的底层,让我们不了解AVR单片机(微控制器)的朋友也能轻松上手。
关键字: ifif...elseforswitch casewhiledo... whilebreakcontinuereturngoto语法符号:;{}//数据类型:字节范围boolean 布尔类型 1 False or turechar 字符类型 1 -128-127byte 字节类型 1 0-255int 整数类型 2 -32768-32768unsigned int 无符号整数类型 2 0-65535long 长整数类型 4unsigned long 无符号长整数类型 4float 浮点类型 4double 双精度浮点类型 4string 字符数组型array 数组类型void 无类型数据类型转换:char()byte()int()long()float()常量:HIGH | LOW 表示数字IO口的电平,HIGH 表示高电平(1),LOW 表示低电平(0)。
INPUT | OUTPUT 表示数字IO口的方向,INPUT 表示输入(高阻态),OUTPUT 表示输出(AVR能提供5V电压 40mA电流)。
true | false true 表示真(1),false表示假(0)。
程序结构声明变量及接口名称(例如:int val;int ledPin=13;)。
void setup() 函数在程序开始时使用,初始化变量,管脚模式,调用库函数等(例如:pinMode(ledPin,OUTUPT);)。
oid loop() 在setup()函数之后,即初始化之后,loop() 让你的程序循环地被执行。
使用v它来运转Arduino。
Arduino认知这学期我们接触了一个新的课程——Arduino。
看着很难懂的一个名称,其实内容很有趣,过程很精彩,并且与上学期学的C语言有一定的相通之处,这给我们的学习过程减轻了很多难处。
这个学科我们一共做了11个实验,分别是光敏电阻、PWN脉宽调制、火焰传感器、4*4数码矩阵、温度传感器、4位数码管显示、人体传感器、RGB三色基LED、舵机控制、LCD1602、超声波测距。
每一个实验都都有不同的实验结果,会给我们带来不一样的体验,给我们增加了很多新奇的体验。
比如说,光敏电阻会因为光感的强弱来改变电阻的闪动频率;温度传感器可以检测到温度,改变呈现给我们数值;4位数码管显示器也很有意思,在程序上输入你想在数码管上显示的字母、数字,待程序完成并执行后就可以在数码管的液晶屏上看到你想呈现的东西;舵机控制的实验,可以看到舵机的螺旋桨转动;RGB三色基LED会出现红绿蓝三色接替闪烁,等等。
每完成一个实验,看到相应的实验结果就满满的成就感。
这里面的实验每一个都需要对应的程序来实现,所以我们每做一个实验的第一步就是敲程序,程序或多或少会有些枯燥,但一想到可以看不同的实验现象就会活力满满。
接下来就具体介绍以下Arduino的来源、作用及实用工具等。
Arduino是源于意大利的一套开源硬件开发平台,他的的作用是能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。
板子上的微控制器可以通过Arduino的编程语言来编写程序,编译成二进制文件,烧录进微控制器。
特色:可开放源代码的电路图设计,程序开发接口免费下载,也可依个人需求自己修改。
是使用低价格的微处理控制器(AVR系列控制器),可以采用USB接口供电,不需外接电源,也可以使用外部9VDC输入。
Arduino支持ISP在线烧,可以将新的“bootloader”固件烧入AVR芯片。
有了bootloader之后,可以通过串口或者USB to RS232线更新固件。

UP30飞控功能简介(固定翼版)简介:UP30型无人机飞控系统包含:机载飞控、地面站软件、通讯设备。
它是一个集成化的系统,包含了所有传感器、GPS、通讯电台,可以控制各种布局的无人驾驶飞机,使用简单方便,控制精度高,GPS导航自动飞行功能强,并且有各种任务接口,方便用户使用各种任务设备。
起飞后即可立即关闭遥控器进入自动导航方式,在地面站上可以随意设置飞行路线和航点,支持飞行中实时修改飞行航点和更改飞行目标点。
具备全自动起降(伞降)的功能。
具备地面站指点飞行模式。
遥控器:•兼容FutabaPCM1024,Futaba2.4G或者JR系列PCM遥控器•地面站可在飞离起飞点后关闭遥控接收功能,防止同频遥控器的干扰,并可在飞回起飞点时自动打开接收机•6通道控制对象可设置(可选控制遥测信号发射、降落伞、襟翼、任务1任务2舵机)•1通道控制副翼或者方向舵可设置舵机:•10个舵机通道•反舵功能每个通道可以单独设置,统一在地面站上操作,使得在安装舵机时可以随意方向安装•捕获舵机中立位置每架飞机的中立舵位可以在飞行中实时设置•舵机50Hz更新率•舵机电源可以单独供给•遥控器直接控制模式RC模式,直接比例控制舵机•13位舵机分辨率•副翼转弯坡度控制•升降舵控制空速或者高度可选•风门控制高度或者空速可选可设置自控最大和最小风门位置,可以设置继电器停车位置,使得关闭发动机风门的同时启动电路停车。
•方向舵转弯速率控制•襟翼•降落伞控制•2个多功能任务舵机可以使用预设值控制,也可以由地面站直接控制;可以控制正射或者自稳平台;可键盘或者游戏杆控制•交联功能1.襟副翼2.升降舵方向舵交联,此模式可以控制V尾3.副翼升降舵交联,此模式可以控制飞翼或者无尾飞机飞控功能:•卡尔曼滤波姿态估算估算滚转角、俯仰角,航向角(需选配3轴电子罗盘)•可设置飞控安装时的偏置角•可设置高度计和空速计的参数•高度与空速保持RPV模式下使用遥控器按命令方式控制:风门摇杆设定飞行速度,升降摇杆设定高度CPV模式下:地面站设定飞行高度、速度UAV模式下:由设定航点的速度和高度控制CRPV模式下:地面站设定飞行高度、速度•高度斜坡控制可以在有高度差的两航点间实现斜坡高度控制•多达10个PID控制回路•内环飞行稳定控制采用30Hz PID回路控制速率•所有PID回路均可在飞行中实时单独的调整•油门PID控制速率1~5Hz•前馈转弯补偿提高转弯过程中的高度控制能力•全自动起降(伞降,滑降需要选配超声波传感器模块)•自驾仪在飞机中可以选择24个安装方向之一•5种控制模式RC模式:遥控器直接控制模式RPV模式:遥控器控制命令值,飞控自动稳定控制(半自主遥控模式)CPV模式:地面站设定飞行速度、高度、航向,飞控自动稳定控制UAV模式:预设导航点全自动导航飞行CRPV模式:游戏杆通过地面站控制飞机滚转坡度,地面站设定飞行速度、高度,飞控自动稳定控制•停车控制内置继电器可以直接控制汽油发动机立即停车,地面站在控制停车时会同时关闭风门•内置软件可升级•多重安全保护:GPS定位保护:如果飞机在自控UAV模式或者CPV飞行过程中GPS不能2D定位(丢星),则飞机可以根据设置的情况进行直飞、原地盘旋或者人工控制立即伞降。

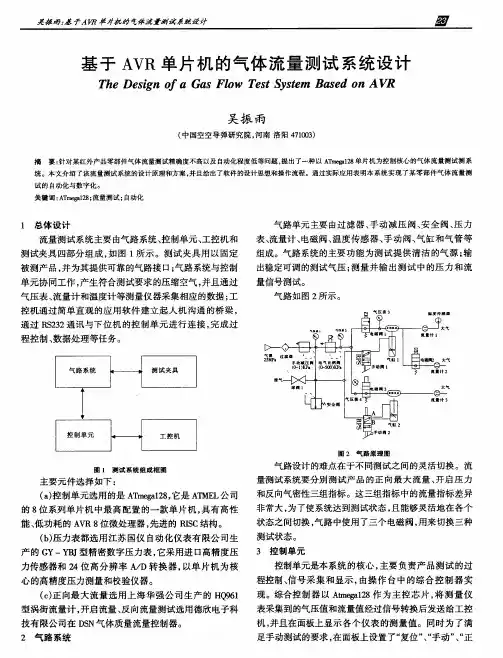
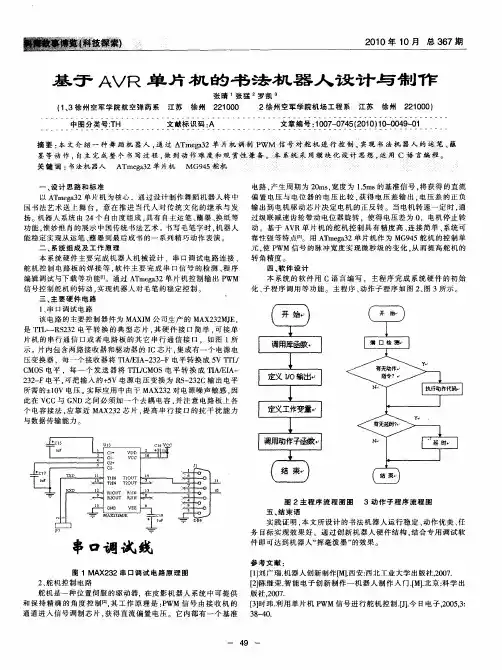
数字技术与应用?应用研究?基于PWM信号遥控机器人的设计与制作张晴袁晓梅罗凯(徐州空军学院航空弹药系江苏徐州 221000)摘要:本文介绍一款遥控机器人,以ATmega16单片机为核心控制器,用航模遥控器驱动MG945舵机工作,控制机器人的运动。
该机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
本系统采用模块化设计思想,软件用C语言编写。
关键词:ATmega16单片机航模遥控器 MG945舵机中图分类号:TP242文献标识码:A文章编号:1007-9416(2010)10-0080-011 设计任务和要求以ATmega16单片机为核心,制作一款遥控机器人,机器人具有可无线遥控、垂直升降、自主语音讲解等功能。
无线遥控时,由航模遥控器控制舵机转动从而驱动小轮胎,推进机器人运动;垂直升降时,遥控器控制电机工作,带动旋翼旋转以完成垂直方向的工作任务;自主语音讲解时机器人通过无线遥控接通语音模块电源并按预先设计好的语音文件做讲解。
个放电晶体管和一个由3只电阻组成的分压器,3只电阻R1、R2、R3均为5KΩ。
遥控发射电路。
555集成块与R1、R2、RP1、VD1、VD2及C1组成一个无稳态、大范围、可变占空比振荡器。
通过RP1阻值的调节,占空比的变化范围可达到1%—99%,输出50Hz方波信号。
VT1及外围元件构成晶体稳频电容三点式振荡器,石英晶体的谐振频率选用27.145Hz,VT1震荡产生的高频载波经555电路方波信号调制,由天线发射出去。
本电路采用石英晶体稳频,故工作可靠。
接收驱动电路。
由VT2及其外围元件构成超再生检波器,检出原方波调制信号。
由C12、R7加至IC2的引脚进行放大,放大后的信号经VD3、VD4倍压整流,由VT3输出平滑的直流电压。
该电压的大小与发送的不同占空比信号波形有关,占空比大,电压高,经R11为VT4提供的偏执电流大,电机的转速高;占空比小,电压低,经R11为VT4提供的偏执电流小,电机转速慢。
一、机器操作手册船上机器的任何重要信息来源是操作和保养手册,它提供了如何安全高效地操作机器的须知。
这些说明应严格遵守。
所有手册应对所有人员随时可用且用船上工作语言编写。
该指南提供了机舱机器操作的通用指南,设备特定手册中的信息永远需要优先考虑。
二、主机和辅机大多数大型货船由大型二冲程低速柴油机推动。
这一节提供了这些机械的操纵指南。
不过,该指南也可能适用于中高速四冲程机器。
1、正常操作机器安全可靠地运转需要良好的值班程序。
比如,有必要定期对空气瓶放残。
如果没有做,起动空气管线会有发生灾难性爆炸的风险。
空冷却器应定期检查、放残,特别是在可产生大量冷凝水的湿热环境中。
值班班组应进行频繁的巡回检查以检查机器运行参数。
应关注任何的偏差或异常,并做出调整,包括燃油、滑油、缸套冷却水以及扫气的温度和压力。
柴油机故障的最常见指标就是排烟温度,高于或低于平均温度,伴有排烟颜色异常。
应调查任何排烟温度偏差过大的原因。
可通过使用示功图或电子设备检查爆压和压缩压力。
机器应该在制造商规定的参数范围内运转。
船舶持续低速航行应遵循低负荷运转的特别指南。
2、应急操作轮机团队的所有成员应经过培训,并且熟悉机旁及应急程序下主机的启动和操纵。
定期演习有助于保持这种熟悉程度。
简明的操作指南应张贴在手动/紧急启动和操纵地点附近。
3、机器保护所有船用柴油机都有针对可能造成严重损坏和事故运行环境的保护机制,利用:Ÿ 警报:达到各种参数预设的偏差时,机器控制系统将触发声光警报。
这些可能是单独的或伴有相应的纠正行为;Ÿ 降速:如果出现的问题比警报更严重,接下来可能自动降低机器速度(比如,滑油高温、缸套水高温);Ÿ 停机:如果出现的问题严重到机器继续运转可能造成严重和或无法挽回的损坏时,控制系统将自动停机(比如,滑油低压、检测到曲拐箱油雾);以及Ÿ 连锁:如果设置的特定参数不满足要求,防止机器启动(比如,盘车机未脱开、起动空气阀关闭)。
三、燃油燃油从加装开始直至通过喷油器喷入柴油机都应谨慎管理。

arduino 编程语言Arduino语言注解Arduino语言是建立在C/C++基础上的,其实也就是基础的C语言,Arduino语言只不过把AVR单片机(微控制器)相关的一些参数设置都函数化,不用我们去了解他的底层,让我们不了解AVR单片机(微控制器)的朋友也能轻松上手。
关键字: if if...elsefor switch case whiledo... while break continue return goto语法符号: ; {} //数据类型: boolean 布尔类型 char 字符类型 byte 字节类型int 整数类型 unsigned int 无符号整数类型 long 长整数类型 unsigned long 无符号长整数类型 float 浮点类型double 双精度浮点类型 string 字符数组型 array 数组类型 void 无类型数据类型转换:char() byte() int() long() float()字节 1 1 1 2 2 4 4 4 4范围False or ture -128-127 0-255 -32768-32768 0-65535常量:HIGH | LOW 表示数字IO口的电平,HIGH 表示高电平(1),LOW 表示低电平(0)。
INPUT | OUTPUT 表示数字IO口的方向,INPUT 表示输入(高阻态),OUTPUT 表示输出(AVR能提供5V电压 40mA电流)。
true | false true 表示真(1),false表示假(0)。
程序结构声明变量及接口名称(例如:int val;int ledPin=13;)。
void setup() 函数在程序开始时使用,初始化变量,管脚模式,调用库函数等(例如:pinMode(ledPin,OUTUPT);)。
void loop() 在setup()函数之后,即初始化之后,loop() 让你的程序循环地被执行。
基于ATmega168的六自由度机械手控制系统的设计【摘要】本文介绍了基于avr系列单片机-atmega168的控制器的设计,以及机械手整体结构的组成设计。
机械系统的设计采用模块化的设计方案,即将功能分解,降低模块之间的耦合性。
控制系统分为硬件控制系统和软件控制系统。
硬件控制系统主要是由6路伺服电机、金属支架组件以及控制器构成。
软件控制系统采用vb 编写的上位机软件进行实时控制。
【关键词】atmega168;伺服电机;自由度;模块化一、机械系统的设计系统的设计采用模块化的方法,模块式机械手是将一些通用部件,根据作业的要求,选择必要的功能完成预定机能的单元部件,以基座为基础进行组合,配上与其相适应的控制部分,即成为能完成特殊要求的机械手。
(1)机器人手部设计。
机器人的手爪又称为末端执行器,是直接用于抓取和握紧专用工具(如喷枪、扳手、焊具等)并进行操作的部件,大致可分为夹钳式、吸附式。
考虑到机器人主要抓取工件,因此采用夹钳式手爪。
手爪的电机采用micro std伺服电机,电机尺寸:28x14x29.8mm,重量:18g,速度:0.13sec/60°,输出力矩:1.8kg·cm。
(2)机器人手臂设计。
手臂的由4个伺服电机组成,通过对伺服电机的控制,实现手臂在各个方向上不同位置的变化。
手臂电机采用金属齿轮伺服电机,电机尺寸为:40.4×19.8×36mm,重量:48g,速度:0.22sec/60°,输出力矩:13kg·cm。
(3)机器人手腕设计。
为了方便对工件的夹持,手腕部的回转设计能够更好的完成对工件的夹持。
手腕的电机采用micro std 伺服电机,电机尺寸:28x14x29.8mm,重量:18g,速度:0.13sec/60°,输出力矩:1.8kg·cm。
(4)机器人底座设计。
底座采用合金压铸,为整个手臂配重,从而保证其运行的必需的稳定性,底座下圆直径为220mm,上圆直径为170mm。
avr舵机控制程序
章节一:引言
在现代科技发展的背景下,舵机在自动控制领域中扮演着重要的角色。
舵机通过接收控制信号,能够实现精确的运动控制,广泛应用于机械臂、无人机、机器人等设备中。
AVR是一种微控制器,它具有低功耗、高效率和多功能等特点,适合用于舵机的控制。
本论文将介绍一种基于AVR的舵机控制程序,以实现舵机的准确控制。
章节二:程序设计
在程序设计方面,我们选择使用C语言来编写AVR舵机控制程序。
首先,我们需要引入相关的库文件,如avr/io.h、
avr/interrupt.h等。
然后,我们通过定义引脚和寄存器的方式,将舵机的控制信号连接到AVR微控制器上。
接下来,我们需要设置AVR微控制器的时钟频率。
舵机通常需要一个准确的时钟信号来进行运动控制,因此我们可以使用定时器来生成一个固定频率的时钟信号。
然后,我们需要编写代码来定义舵机的运动范围和速度。
根据舵机的规格书,我们可以确定舵机的位置范围和速度范围,然后将这些参数以变量的形式保存在程序中。
最后,我们需要编写代码来实现舵机的运动控制。
通过调整舵机的PWM信号,我们可以控制舵机的位置和速度。
在控制过
程中,我们可以使用PID控制算法来实现更加精确的控制。
章节三:实验结果
为了验证舵机控制程序的有效性,我们进行了一系列的实验。
首先,我们通过改变PWM占空比来控制舵机的位置,然后通过改变PWM频率来控制舵机的速度。
实验结果显示,舵机能够按照我们预设的位置和速度进行准确的运动。
通过对比实际测量值和预设值,我们可以确定舵机控制程序的稳定性和准确性。
章节四:结论
本论文介绍了一种基于AVR的舵机控制程序,并通过实验验证了其有效性。
通过控制舵机的位置和速度,我们可以实现对舵机的精确控制。
在未来的研究中,我们可以进一步优化舵机控制程序,提高运动的精确性和稳定性。
此外,我们还可以将AVR舵机控制程序应用到更多的自动控制系统中,以满足不同领域和应用的需求。
扩展篇
章节五:改进方向
基于AVR的舵机控制程序已经得到了初步验证,但还有一些改进的方向可以进一步提高其性能和应用范围。
首先,我们可以优化控制算法,例如使用更高级的PID控制算法来实现更加精确和稳定的舵机运动控制。
其次,我们可以引入传感器反馈机制,例如通过角度传感器来实时监测舵机的位置,然后将
该信息反馈给控制系统进行闭环控制,以进一步提高舵机的控制准确性。
此外,我们还可以考虑将舵机控制程序与其他智能系统相结合,例如计算机视觉、机器学习等,以实现更加智能化的舵机控制。
章节六:拓展应用
AVR舵机控制程序不仅可以应用于机械臂、无人机、机器人
等传统领域,还可以拓展到更多领域。
例如,在舞台灯光控制中,可以使用AVR舵机控制程序来控制舞台灯光的旋转和倾斜,实现更加精确的照明效果。
在航空航天领域,AVR舵机
控制程序可以应用于航空器的机翼和襟翼控制,实现更加灵活和稳定的飞行。
此外,在医疗器械领域,AVR舵机控制程序
可以应用于手术机器人的运动控制,实现精细的手术操作。
章节七:总结
通过研究AVR舵机控制程序,本论文提出了一种基于AVR
的舵机控制方案,并通过实验验证了其有效性。
该方案通过使用AVR微控制器和C语言编写程序,实现对舵机的精确控制。
在实验中,舵机能够按照预设的位置和速度进行准确的运动,验证了控制程序的稳定性和准确性。
未来,我们可以进一步优化舵机控制程序,例如改进控制算法、引入传感器反馈等,以提高舵机的性能。
另外,我们还可以将AVR舵机控制程序应用到更多的领域中,通过与其他智能系
统结合,实现更加智能化和多样化的舵机控制需求。