舵机控制信号发生器
- 格式:ppt
- 大小:2.03 MB
- 文档页数:13
pwm控制舵机程序章节一:引言在机器人工程和自动化领域中,舵机是常用的控制组件之一。
它具有小型化、高功率密度、高稳定性和高精度控制等优点,被广泛应用于机械手臂、无人机、汽车模型等领域。
PWM(脉宽调制)技术是一种常用的舵机控制方法,通过调整PWM信号的占空比来控制舵机的位置和角度。
本论文将介绍PWM控制舵机的原理和实现方法,以及相关的电路设计和程序编写。
本文的目的是帮助读者理解PWM控制舵机的基本原理和实现过程,并为舵机控制系统的设计和开发提供参考。
章节二:PWM控制舵机原理2.1 脉宽调制技术脉宽调制技术是一种将模拟信号转换为数字信号的方法。
它通过改变数字信号中的脉冲宽度来模拟模拟信号的幅度变化。
在PWM控制舵机中,通常使用的是固定频率的PWM信号。
通常,脉宽调制技术通过改变脉冲的占空比(High电平的时间与周期的比值)来实现不同的输出。
2.2 舵机工作原理舵机是一种基于PWM信号控制的电机。
它通过接收PWM信号来控制转轴的角度。
舵机通常由电机、伺服控制电路和位置反馈元件组成。
伺服控制电路将接收到的PWM信号与位置反馈进行比较,并控制电机的转动来实现所需的舵机位置和角度。
章节三:PWM控制舵机的电路设计3.1 舵机电路原理图本文设计的舵机电路采用基于微控制器的PWM信号发生器和舵机驱动器。
PWM信号发生器负责产生固定频率的PWM信号,而舵机驱动器负责将PWM信号转换为电机驱动信号以控制舵机的转动。
电路的主要部分是使用可编程微控制器作为信号发生器和驱动器的核心组件。
3.2 电路参数设计本文设计的电路需要满足舵机的工作电压、驱动电流和PWM信号的频率要求。
根据所选用的舵机型号和规格,确定电路中的关键参数,包括驱动电压、最大输出电流、PWM信号频率等。
章节四:PWM控制舵机程序编写4.1 硬件初始化在编写PWM控制舵机程序之前,首先需要进行硬件初始化,包括设置PWM信号发生器和驱动器的引脚和参数,以及舵机电路的供电。
舵机速度控制原理一、简介舵机是一种常见的电机装置,用于控制机器人或其他设备的角度或位置。
舵机速度控制是指调节舵机旋转的速度,使其能够按照预定的速度进行移动。
本文将深入探讨舵机速度控制的原理及相关知识。
二、舵机基本原理舵机的基本原理是通过提供电流来驱动电机转动,同时通过电子电路控制电机的角度。
舵机通常由一个电机、一个位置传感器和一个电子电路组成。
当电流通过电机时,电机开始旋转。
位置传感器会监测电机的角度,并将这一信息传输给电子电路。
电子电路会根据接收到的角度信号,控制电机的转动,使其停留在特定的位置。
三、舵机速度控制原理舵机速度控制是在舵机基本原理的基础上,通过控制电机旋转的速度来实现的。
下面将介绍舵机速度控制的原理和实现方法。
1. PWM信号控制舵机速度的控制是通过改变PWM信号来实现的。
PWM即脉宽调制信号,它的工作原理是通过改变信号的脉冲宽度来控制电机的转速。
舵机所接收的PWM信号通常是一个周期为20ms的方波信号,脉冲宽度在0.5ms到2.5ms之间,其中1.5ms为中间位置。
脉冲宽度越大,舵机转动的角度也越大,速度也就越快。
2. 舵机控制电路为了实现舵机的速度控制,需要添加一个舵机控制电路。
舵机控制电路通常由微控制器、驱动电路和PWM信号发生器组成。
微控制器负责接收输入的速度指令,并将其转换成相应的PWM信号。
驱动电路负责放大电流并驱动电机转动。
PWM信号发生器则用于生成PWM信号,并将其发送给舵机。
3. 控制算法舵机速度控制的实现还需要控制算法的支持。
常见的控制算法有以下几种:•开环控制:根据速度指令直接控制PWM信号的脉冲宽度。
这种方法简单但不够准确,容易受到外界干扰而导致误差增大。
•闭环控制:根据速度指令和实际转速的差异,通过调整PWM信号来控制舵机的速度。
闭环控制能够更精确地控制舵机的速度,但需要额外的位置传感器来监测实际转速。
•PID控制:PID控制是一种常用的闭环控制算法,通过比较实际转速和目标转速的差异,计算出一个修正量,再通过调整PWM信号的脉冲宽度来控制舵机的速度。
2011年6月1日第34卷第11期现代电子技术M odern Electro nics T echniqueJun.2011Vo l.34No.11多路舵机控制PWM 发生器的设计与Proteus 仿真冯晓伟,王雷阳,李正生(第二炮兵工程学院101教研室,陕西西安 710025)摘 要:P WM 脉宽信号调制是现代电子行业中使用较为广泛的一种脉冲信号,其典型应用就是舵机控制。
以P ro teus 和Keil 软件为基础,介绍了在P ro teus 环境下利用51单片机产生多路P WM 脉冲的实现方法。
最后以一个典型的应用实例验证了设计的可行性与可靠性。
实验证明,本系统可在单片机定时器资源有限的情况下同时对多个舵机的输出转角进行控制。
关键词:P WM ;舵机控制;P ro teus;K eil;单片机中图分类号:T N76 34;T M 02 34 文献标识码:A 文章编号:1004 373X (2011)11 0167 03Design and Simulation of Multipass Servo Control PWM Generator Based on ProteusF ENG X iao w ei,WA N G L ei yang ,L I Zheng sheng(T he Seco nd Artillery Engineering U niversity ,Xi an 710025,Chi na)Abstract :Pulse width modulation (P WM )is a w idely used met ho d of signal modulatio n in electro nics industry.Its ty pical application is servo co nt rol.A met ho d of realizing the gain multipath PWM pulse pr oduced by 51M CU under the condition of Pr oteus and keil is intr oduced.T he feasibility and reliability o f the design are v erified based on a typical application.T he ex periment pr oves that this system can be applied t o multi ser vo co ntr ol under the condit ion of limit ed M CU timer resource.Keywords :PW M ;serv o contr ol;P roteus;K eil;M CU收稿日期:2010 12 150 引 言单片机是现代仪器仪表、家用电器、工业仪器等领域应用十分广泛的可编程器件之一,有着价格低廉、编程灵活、体积小、可扩展性强等优点。
舵机的控制信号章节一:引言舵机是一种常用于控制机械运动的设备,广泛应用于机器人、航空模型、车辆模型等领域。
控制信号是舵机工作的重要组成部分,它可以精确地控制舵机的位置和速度。
本文将介绍舵机的工作原理以及不同类型的舵机控制信号,并探讨其应用前景和发展趋势。
章节二:舵机的工作原理舵机是一种运用直流电机驱动的装置,通过电流的正反方向控制舵机运动的角度。
当舵机接收到控制信号后,内部的电路系统会处理并驱动电机,使其达到指定的角度。
舵机通常由电机、减速器和位置传感器等组成。
电机驱动在舵机内部发生的转动,通过减速器传递给输出轴,再由位置传感器检测轴的位置,并反馈给电路系统。
章节三:舵机控制信号的类型舵机的控制信号是通过脉冲宽度调制(PWM)来实现的。
PWM是一种通过改变脉冲的高电平时间来控制信号的方式。
具体而言,控制信号的周期通常为20毫秒,而高电平时间则由0.5毫秒到2.5毫秒不等,其中0.5毫秒对应舵机的最大逆时针角度,2.5毫秒对应舵机的最大顺时针角度,1.5毫秒则对应舵机的中立位置。
通过改变高电平时间,可以控制舵机的角度位置,从而实现对舵机的控制。
章节四:舵机控制信号的应用和发展趋势舵机控制信号在机器人、航空模型和车辆模型等领域有着广泛的应用。
通过舵机控制信号,可以实现机器人的自动化控制、航空模型的稳定飞行以及车辆模型的准确转向。
随着科技的不断进步,舵机控制信号的应用将会更加广泛。
未来,舵机控制信号有望在人工智能、智能家居以及医疗机器人等领域发挥更重要的作用。
同时,人们也在研究改进舵机控制信号的精度和稳定性,以满足不同领域对于舵机的更高要求。
综上所述,舵机的控制信号是控制舵机运动的关键因素,对于实现机器人和模型的运动控制具有重要意义。
了解舵机的工作原理和不同类型的控制信号,对于应用舵机的领域具有重要的指导作用。
未来,舵机控制信号有望在更多领域得到应用,并通过技术的不断进步来提升其精度和稳定性。
章节五:舵机控制信号的调试和优化为了确保舵机的稳定和精确性,舵机控制信号需要进行调试和优化。
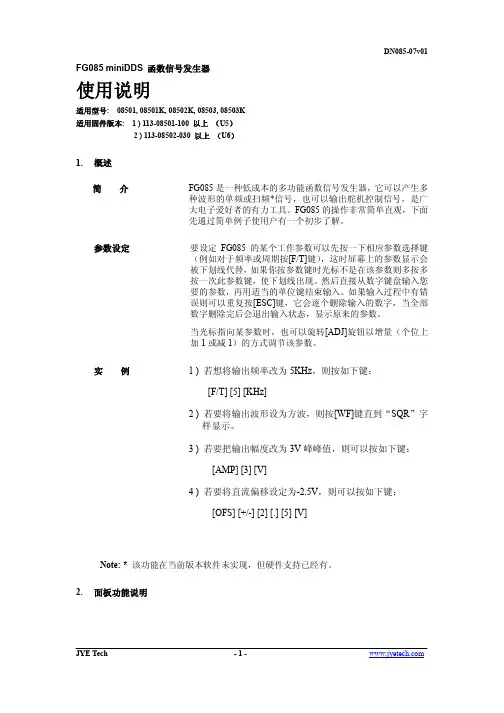
DN085-07v01 FG085 miniDDS 函数信号发生器使用说明适用型号: 08501, 08501K, 08502K, 08503, 08503K适用固件版本: 1 ) 113-08501-100 以上(U5)2 ) 113-08502-030 以上(U6)1.概述简介FG085是一种低成本的多功能函数信号发生器,它可以产生多种波形的单频或扫频*信号,也可以输出舵机控制信号,是广大电子爱好者的有力工具。
FG085的操作非常简单直观,下面先通过简单例子使用户有一个初步了解。
参数设定要设定FG085的某个工作参数可以先按一下相应参数选择键(例如对于频率或周期按[F/T]键),这时屏幕上的参数显示会被下划线代替,如果你按参数键时光标不是在该参数则多按多按一次此参数键,使下划线出现。
然后直接从数字键盘输入您要的参数,再用适当的单位键结束输入。
如果输入过程中有错误则可以重复按[ESC]键,它会逐个删除输入的数字,当全部数字删除完后会退出输入状态,显示原来的参数。
当光标指向某参数时,也可以旋转[ADJ]旋钮以增量(个位上加1或减1)的方式调节该参数。
实例 1 ) 若想将输出频率改为5KHz,则按如下键:[F/T] [5] [KHz]2 ) 若要将输出波形设为方波,则按[WF]键直到“SQR”字样显示。
3 ) 若要把输出幅度改为3V峰峰值,则可以按如下键:[AMP] [3] [V]4 ) 若要将直流偏移设定为-2.5V,则可以按如下键:[OFS] [+/-] [2] [.] [5] [V]Note: *该功能在当前版本软件未实现,但硬件支持已经有。
2.面板功能说明JYE Tech - 1 - 08501/08502前视08503前视1 ) 电源开关 FG085 的启动和关闭。
2 ) 参数选择键选择要设定的参数,如果光标不是处于所选参数会先将光标移到该参数。
3 ) 数字输入键通过数字键盘直接输入要设定的参数,然后用单位键完成参数输入。
舵机控制电路章节一:引言 (200字左右)在现代机械领域,舵机作为一种重要的控制装置,广泛应用于机器人、飞行器、汽车等多个领域。
舵机是一种可以提供精确角度控制的电机,通过接收电子信号,将其转换为机械角度运动。
本论文将探讨舵机的原理、工作方式以及相应的控制电路设计。
章节二:舵机原理及工作方式 (300字左右)舵机的核心组件是电机、编码器和控制电路。
其中,电机负责提供力矩和转动,编码器负责测量角度,控制电路则将信号转换为对电机的控制。
舵机工作时,通过不同的脉冲宽度来控制转动角度。
通常,脉冲宽度在0.5ms到2.5ms之间,其中1.5ms为中立位置。
舵机根据收到的脉冲宽度调整转动角度,从而实现机械装置的控制。
章节三:舵机控制电路设计 (300字左右)舵机控制电路设计一般包括信号发生器、电源和驱动电路。
信号发生器负责产生控制信号,其输出脉冲宽度可以通过微控制器或其他电子设备的输出端口来控制。
电源为舵机提供驱动电压,在正常工作条件下,一般为4.8V至6V。
驱动电路将信号发生器的输出与舵机的控制输入连接,以实现对舵机的精确控制。
值得注意的是,舵机控制电路设计需要考虑到电流的稳定性和电压的降噪处理,以确保舵机能够稳定运行。
章节四:舵机控制电路的应用和发展趋势 (200字左右)舵机控制电路在机械领域有着广泛的应用。
例如,在机器人领域,舵机能够实现机械臂的精确运动控制,使机器人能够完成各种复杂的任务。
在航空领域,舵机也被应用于飞行器的飞行控制系统中,提供稳定的姿态调整。
此外,舵机控制电路的发展趋势主要体现在小型化、高效化和智能化方面。
随着技术的进步,舵机将会变得更加节能高效,且具备更强的自适应控制能力。
综上所述,舵机控制电路在机械领域具有重要的应用意义。
通过对舵机原理及工作方式的探究和舵机控制电路设计的详细介绍,我们可以更好地理解舵机的工作原理,并在实际应用中进行精确控制。
未来,随着舵机控制电路的不断发展,我们相信舵机将在更多领域发挥重要的作用。
舵机的工作原理和PWM信号控制分析(二)引言概述:在上一篇文章中,我们已经初步了解了舵机的工作原理以及PWM信号的基本概念。
本文将继续深入探讨舵机的工作原理,并详细分析PWM信号在舵机控制中的运用。
正文:一、舵机的工作原理1. 电机运转原理- 舵机内部装有电动机,通过电能转换为机械能。
- 电机通常采用直流无刷电机,具有高效率和长寿命的特点。
2. 位置反馈系统- 舵机内部配备位置反馈系统,用于检测舵盘位置并实时反馈给控制器。
- 位置反馈系统通常采用编码器或霍尔传感器等装置。
3. 控制器- 舵机的控制器根据接收到的控制信号和位置反馈信号,计算出应去的位置,并驱动电机转动到该位置。
- 控制器的设计和算法决定了舵机的精度和响应速度。
二、PWM信号的概念1. PWM信号的产生- PWM信号是一种脉冲宽度调制信号,由一个高电平和一个低电平组成。
- 通过改变高电平和低电平的持续时间比例,可以调整PWM信号的占空比。
2. PWM信号在舵机中的作用- PWM信号被用于控制舵机的位置。
- 控制器根据接收到的PWM信号的占空比,确定舵盘应该转到的位置。
三、PWM信号与舵机的工作原理的关系1. PWM信号与位置控制- 不同的PWM信号占空比对应不同的位置输入。
- PWM信号的占空比与舵盘位置的关系可以通过试验得到,从而建立校准模型。
2. PWM信号与速度控制- 通过改变PWM信号的占空比可以改变舵盘旋转的速度。
- PWM信号的频率也会影响到舵机的响应速度。
四、PWM信号控制舵机的注意事项1. PWM信号的频率选取- 通常舵机的工作频率在50Hz到300Hz之间,选择合适的频率可以保证舵机的正常工作。
- 过低的频率可能导致舵机颤动或者无法工作。
2. PWM信号的占空比设置- 根据舵机的校准模型,设置PWM信号的占空比可以精确控制舵盘的位置。
- 过大或过小的占空比可能导致舵盘不能准确到达期望位置。
五、总结本文深入探讨了舵机的工作原理以及PWM信号在舵机控制中的应用。
舵机控制信号设计章节一:引言(Introduction)舵机是一种常用的控制执行器,广泛应用于模型飞机、机器人、船舶等领域。
舵机的工作原理是通过控制信号的输入,驱动舵机转动到指定的角度。
因此,设计一个合适的舵机控制信号是非常重要的。
章节二:舵机控制信号的基本原理(Principles of Servo Control Signal)舵机控制信号主要由脉冲宽度调制(PWM)信号组成。
通常情况下,舵机控制信号的周期为20毫秒(ms),脉冲宽度在1-2毫秒(ms)之间,其中1.5毫秒(ms)为中心位置。
在舵机控制信号中,脉冲宽度的变化决定了舵机转动的角度。
根据舵机的规格表,可得到脉冲宽度与转向角度之间的关系。
通过调整脉冲宽度,可以实现舵机转动到不同的位置。
章节三:舵机控制信号的设计方法(Design Methods of Servo Control Signal)舵机控制信号的设计目标是实现精准的转向角度控制。
一种常用的舵机控制信号设计方法是使用微控制器(MCU)生成PWM信号。
在MCU内部,可以使用定时器模块来生成精确的PWM脉冲信号。
通过调整定时器的参数,可以得到合适的舵机控制信号。
在设计舵机控制信号时,需要注意以下几个方面:1. 确定舵机的工作电压范围,以保证舵机能够正常工作;2. 根据舵机规格表,确定脉冲宽度与转向角度的关系;3. 使用合适的驱动电路,以确保舵机能够获得足够的电流供应;4. 考虑舵机的响应时间,确保控制信号的更新频率足够快。
章节四:舵机控制信号的应用案例(Application Cases of Servo Control Signal)舵机控制信号在模型飞机、机器人、船舶等领域有广泛的应用。
例如,在模型飞机中,舵机控制信号可以用于控制飞行姿态的调整,实现飞机的稳定飞行。
在机器人中,舵机控制信号可以用于控制机器人的关节,实现机器人的灵活运动。
在船舶中,舵机控制信号可以用于控制船舶的舵角,实现船舶的转向。
舵机控制电路图舵机控制电路图第一章:引言1.1 研究背景舵机是一种常用的控制装置,被广泛应用于机器人、自动驾驶汽车、航空航天和其他自动控制系统中。
舵机通过转动输出轴来控制物体的角度和位置,具有高精度、高稳定性和高响应速度的优点。
1.2 目的与意义本文旨在研究舵机控制电路图的设计原理和实现方法,以进一步提高舵机控制系统的性能和稳定性。
第二章:舵机控制电路图的设计2.1 信号发生器设计为了控制舵机的角度和位置,我们需要一个信号发生器来生成适当的脉冲信号。
通过设定信号发生器的周期和占空比,可以控制脉冲的宽度和频率。
2.2 驱动电路设计舵机通常需要大电流才能正常工作,因此需要一个合适的驱动电路来提供所需的电流。
驱动电路通常由功率放大器和电流放大器组成,以驱动舵机工作。
2.3 反馈电路设计为了使舵机能够准确地控制角度和位置,反馈电路是必不可少的。
反馈电路通常通过编码器或传感器来监测舵机的角度和位置,并将这些信息反馈给控制系统,以实现闭环控制。
2.4 控制系统设计控制系统是舵机控制电路的核心部分,它根据输入信号和反馈信号来计算控制信号,以控制舵机的运动。
常见的控制算法有比例积分微分(PID)控制算法和模糊控制算法。
第三章:实验结果与讨论在实际应用中,我们使用舵机控制电路进行了一系列实验,以评估其性能和稳定性。
实验结果表明,舵机控制电路能够实现准确的控制和稳定的运动,并且具有良好的性能。
第四章:结论与展望本文研究了舵机控制电路图的设计原理和实现方法,实验结果表明该电路具有良好的控制性能和稳定性。
在未来的研究中,我们将进一步优化舵机控制电路,以提高其精度和响应速度,并探索更多的控制算法,以适应不同场景下的控制需求。
总结:本文研究了舵机控制电路图的设计原理和实现方法,包括信号发生器设计、驱动电路设计、反馈电路设计和控制系统设计。
实验结果表明该电路具有良好的控制性能和稳定性。
未来的研究方向包括优化舵机控制电路,提高其精度和响应速度,并探索更多的控制算法。
舵机速度控制原理舵机是一种常见的电机,主要用于控制机器人、模型船、飞机等设备的运动。
舵机速度控制是控制舵机转动速度的一种技术,可以实现精确的运动控制。
本文将详细介绍舵机速度控制原理。
一、舵机基础知识1. 舵机结构舵机由电机、减速器、位置反馈装置、控制电路和输出轴组成。
其中,电机通过减速器将高速旋转转换为低速高扭矩输出,位置反馈装置可以测量输出轴位置,并将其反馈给控制电路,从而实现精确的位置控制。
2. 舵机工作原理当输入PWM信号时,舵机会根据信号占空比来确定输出轴的位置。
PWM信号周期一般为20ms,占空比范围为0-100%。
当占空比为0%时,输出轴处于最左侧;当占空比为50%时,输出轴处于中心位置;当占空比为100%时,输出轴处于最右侧。
二、舵机速度控制原理1. PWM信号频率与周期PWM信号频率指每秒钟PWM信号重复出现的次数。
PWM信号周期指PWM信号一次完整的周期所需要的时间。
一般来说,PWM信号频率越高,控制精度越高,但同时也会增加计算负担和电路复杂度。
PWM信号周期越短,输出轴转动速度就越快。
2. 舵机速度控制方法舵机速度控制可以通过改变PWM信号占空比来实现。
当占空比较小时,输出轴转动速度较慢;当占空比较大时,输出轴转动速度较快。
因此,可以通过改变PWM信号占空比的大小来控制舵机的转动速度。
3. 舵机加减速控制方法为了实现更加精确的运动控制,可以采用舵机加减速控制方法。
该方法主要分为两个阶段:加速阶段和匀速阶段。
在加速阶段中,PWM信号占空比逐渐增大,输出轴转动速度逐渐增快;在匀速阶段中,PWM信号占空比保持不变,输出轴转动速度保持恒定。
当需要停止时,则采用减速阶段,在该阶段中PWM信号占空比逐渐减小,输出轴转动速度逐渐减慢,直到停止。
三、舵机速度控制电路设计1. 舵机速度控制电路原理图舵机速度控制电路主要由PWM信号发生器、加减速电路、H桥驱动电路和舵机组成。
其中,PWM信号发生器用于产生PWM信号;加减速电路用于实现舵机加减速控制;H桥驱动电路用于控制输出轴的转向;舵机则是被控制的对象。
舵机的控制方式和工作原理介绍在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。
舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。
舵机是一种俗称,其实是一种伺服马达。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。
就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。
舵机的控制:舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。
以180度角度伺服为例,那么对应的控制关系是这样的:0.5ms--------------0度;1.0ms------------45度;1.5ms------------90度;2.0ms-----------135度;2.5ms-----------180度;这只是一种参考数值,具体的参数,请参见舵机的技术参数。
小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。
如果需要更快速的反应,就需要更高的转速了。
要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us 约2us。
舵机测试实验报告-反恐精英 2014.9.23 一、实验目的为了更好地熟悉信号发生器、稳压电源等多种仪器的使用,以及为以后更好地设计“排爆”机器的舵机系统,我们需要对舵机转盘旋转角度与其控制信号周期、占空比之间的关系进行及较为精确的定性定量分析。
二、实验原理舵机的控制信号是PWM信号,利用其占空比的变化可改变舵机的位置。
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围内的角度控制脉冲部分,总间隔为2ms。
此外,PWM信号周期对舵机转盘转动角度的可控范围也有一定程度的影响。
三、实验思路1、根据查询的相关资料里的数据,进行验证型实验。
即连接好测量电路后,将控制信号的参数设置为资料中提供数据,测量相对应舵机转盘转动的角度,测量约4~5组实验数据并记录。
2、电路连接保持不变,固定控制信号频率值,调节其占空比,间隔为2.5%,测量相对应舵机转盘转动的角度,记录实验数据。
3、电路连接保持不变,依次固定控制占空比为2.5%、5%、7.5%,调节控制信号频率(即信号周期),间隔为10Hz,测量相对应舵机转盘转动的角度,记录实验数据。
4、拆除电路,将信号发生器输出直接与示波器相连,估计信号发生器实际输出信号的相关参数与其设定标准值之间的误差。
5、将记录好的实验数据进行分析总结,得出结论。
四、舵机转盘旋转角度的测量方法根据实验的硬件条件,我们做出了以下三种测量方案:1、认为圆形孔状转盘上各孔间距相等,根据某一孔的位置变化,粗测出转盘转过的角度。
这种方法比较粗略,可以大致得出转动角度随占空比线性变化的结论。
2、在纸上画出圆形表盘,将舵机的三根电线与12点钟方向对齐,记录舵机扇叶的初始位置,每转过一定角度,用笔垂直于扇叶向下在纸上标注。
用量角器测出纸上各点对应的圆心角。
这种方法误差在于舵机转盘的中心与纸上表盘的中心不一致,导致所测角度与实际值存在较大偏差。
3、将舵机正面朝向纸面,用铁丝从纸的反面对准舵机转盘中心戳一个小孔作为角度测量的圆心,将每次转动后扇叶在纸上的位置记录下来。
舵机控制器原理舵机控制器原理第一章:引言舵机是一种常用于控制机械运动的装置,广泛应用于机器人、模型飞机、工业自动化等领域。
舵机控制器作为舵机控制的核心部件,承担着信号处理和驱动输出功能。
本章将介绍舵机的基本概念、工作原理以及舵机控制器在舵机控制中的作用。
第二章:舵机工作原理舵机是一种将电信号转化为运动的执行器。
通常由直流电机、功率驱动电路和位置反馈装置组成。
2.1 直流电机舵机中常用的直流电机是一种由电磁铁产生的转矩来驱动转动的电机。
通过电磁铁的磁场和永磁体之间的作用力,实现电能到机械能的转换。
2.2 位置反馈装置舵机的位置反馈装置主要用来检测舵机的角度,并将检测到的信息反馈给控制器。
目前常用的位置反馈装置主要有光电编码器、磁编码器等。
2.3 功率驱动电路舵机的功率驱动电路主要负责将信号处理后的控制信号转换为电流、电压等能够驱动电机的形式。
常用的功率驱动电路包括H桥驱动电路、驱动芯片等。
第三章:舵机控制器的工作原理舵机控制器是舵机控制的核心,其主要功能是接收外部控制信号并进行信号处理,然后输出对应的驱动信号给舵机。
舵机控制器的工作原理一般可以分为以下几个步骤:3.1 接收控制信号舵机控制器通过与系统中的控制设备(如遥控器、微控制器等)建立通信,接收外部的控制信号。
3.2 信号处理接收到的控制信号包括脉宽调制(PWM)信号等,舵机控制器需要对这些信号进行处理,提取出有效信息,并转换为合适的控制量。
3.3 控制算法舵机控制器根据处理后的信号通过控制算法来确定舵机的运动方式和目标位置,包括位置控制和速度控制等。
3.4 输出驱动信号控制器根据控制算法得到的控制量,通过功率驱动电路将驱动信号转换为电流或电压等形式,驱动舵机的运动。
第四章:舵机控制器的应用舵机控制器广泛应用于机器人、模型飞机、船舶、工业自动化等领域。
在机器人领域,舵机控制器能够实现机器人关节的运动控制;在模型飞机中,舵机控制器能够控制舵面的位置,实现飞机的姿态调整。
舵机控制信号章节一:导言 (Introduction)在现代自动控制系统中,舵机(servo)被广泛应用于各种机电设备中,如机器人、遥控模型以及工业自动化等。
舵机可以精确控制输出轴的位置和速度,从而实现对设备运动的精确控制。
其基本原理是通过接收输入信号,将电子信号转换为机械运动。
本论文旨在探讨舵机控制信号及其作用机制。
章节二:舵机控制信号及传输(Servo Control Signal and Transmission)舵机控制信号是指用于控制舵机运动的电子信号,常见的舵机控制信号有脉宽调制(PWM)信号和模拟控制信号。
其中,PWM信号是最常用的一种,通过改变信号的脉宽和周期,控制舵机的位置和速度。
舵机控制信号的传输方式主要有有线和无线两种。
在有线传输中,一般使用电缆或导线将信号传输到舵机。
而在无线传输中,通过无线电波或红外线将信号传输到舵机。
无论是有线还是无线传输,确保信号的稳定性和可靠性对于舵机的运动控制至关重要。
章节三:舵机控制信号的作用机制(Mechanism of Servo Control Signal)舵机控制信号的作用机制主要有两个方面:位置反馈和反射作用。
首先是位置反馈。
舵机内部装有一个位置传感器,用于测量输出轴的位置。
当接收到控制信号后,舵机会读取信号脉宽,并将其转换为对应的输出轴位置。
再通过位置传感器不断监测输出轴的位置,舵机可以根据需要对其进行修正,实现精确的位置控制。
其次是反射作用。
当舵机运动时,其输出轴会产生惯性力和阻力。
这些力会通过输出轴反馈给舵机,舵机会感知到这些反馈信息,并对信号进行调整以保持预期的运动轨迹和速度。
通过反射作用,舵机可以实现平稳准确的运动控制。
章节四:舵机控制信号的应用领域(Applications of Servo Control Signal)舵机控制信号在众多领域中被广泛应用。
在机器人领域,舵机控制信号被用于控制机械手臂的运动、控制机器人的步态等。
舵机信号控制章节一:引言舵机是一种常用的电机控制设备,广泛应用于机器人、航空模型、无人机等领域。
舵机的主要功能是实现精确的角度控制,通过接收控制信号来定位到特定的角度位置。
本论文将重点研究舵机信号控制的原理和方法,探讨不同的控制算法在舵机控制中的应用。
章节二:舵机信号的基本原理舵机信号是通过脉宽调制(PWM)方式实现的,通常使用几个特定的脉冲宽度表示不同的角度位置。
标准的PWM信号周期为20ms,其中高电平的脉冲宽度在0.5ms到2.5ms之间,对应舵机的角度范围通常为-90°到+90°。
舵机通过解析控制信号的脉冲宽度,并将其转换为特定的角度位置。
章节三:舵机信号控制的算法与方法舵机信号控制的核心是解析控制信号,并将其转换为特定的角度位置。
常用的方法包括矩阵查表法、线性插值法和PID控制法。
矩阵查表法是一种简单有效的方法,通过预先建立一个脉冲宽度与角度的映射表,根据控制信号的脉冲宽度在映射表中查找对应的角度位置。
线性插值法是一种更精确的方法,通过使用线性插值公式根据控制信号的脉冲宽度计算得到对应的角度位置。
线性插值法相对于矩阵查表法更加灵活,可以实现更高的角度精度。
PID控制法是一种基于反馈的控制方法,通过根据当前位置和目标位置之间的偏差调整控制信号的输出。
PID控制法具有响应快、抗干扰能力强的特点,能够实现较为精确的舵机控制。
章节四:实验结果与讨论本章将通过实验验证不同的舵机控制算法在舵机信号控制中的性能差异。
通过比较矩阵查表法、线性插值法和PID控制法在舵机角度控制精度和响应速度方面的表现,得出不同算法的优劣势,并分析其适用场景和改进空间。
实验结果表明,不同的舵机控制算法在舵机信号控制中具有不同的性能特点。
矩阵查表法简单易实现,适用于对角度精度要求不高的应用场景;线性插值法在角度精度和响应速度方面表现较好,适用于对控制精度要求较高的应用场景;PID控制法响应速度快、抗干扰能力强,适用于需要快速、稳定控制的应用场景。
数字舵机的控制信号数字舵机的控制信号第一章:引言数字舵机是一种常用的装置,用于控制机械装置的精确位置和角度。
数字舵机的特点是能够通过数字信号进行控制,提供高精度和灵活性。
本文将介绍数字舵机的基本原理和控制信号的相关内容。
第二章:数字舵机的工作原理数字舵机由电机、位置传感器、控制电路和电源组成。
在工作过程中,电机通过接收来自控制电路的数字信号进行驱动。
位置传感器用于监测舵机的转动角度,并将其转化为数字信号。
然后这个数字信号会经过一系列的处理和运算,最终产生出控制信号,将所需的角度转动信息传递给舵机。
数字舵机的工作原理可以简单概括为:接收输入的位置指令信号,将其转换为电信号,通过控制电路驱动电机以实现舵机转动。
第三章:数字舵机的控制信号数字舵机的控制信号通常是脉冲宽度调制(PWM)信号。
PWM信号由一系列的脉冲组成,脉冲的宽度决定了舵机转动的角度。
通常情况下,脉冲宽度在一定的范围内变化,例如0.5ms-2.5ms,其中0.5ms代表最小角度,2.5ms代表最大角度。
舵机根据接收到的脉冲宽度信号而转动到对应的角度位置。
传统的PWM信号通常使用频率为50Hz,即每20ms发送一次。
但近年来,高频率的PWM信号,如250Hz或更高,也变得流行。
这些高频率信号能够提供更高的精度和响应速度。
第四章:调整和优化数字舵机的控制信号为了保证数字舵机的正常工作并获得更好的性能,调整和优化控制信号是非常重要的。
首先,要保证PWM信号的合理范围,确保脉冲宽度在舵机的工作范围内。
其次,要合理选择PWM信号的频率,以平衡控制精度和响应速度。
频率过低会导致控制精度不高,频率过高则可能造成处理器负荷过大。
另外,还可以通过增加分辨率的方式提高控制信号的精度。
通过增加PWM信号的周期,可以使舵机的角度调整更精确,但同时也会增加处理器的负荷。
在调整和优化数字舵机的控制信号时,需要综合考虑控制精度、响应速度和系统限制,以实现最佳的性能。