什么是结构化网格和非结构化网格
- 格式:doc
- 大小:33.50 KB
- 文档页数:4

Gambit网格划分,交界面的处理简单说分块划分网格,如果不定义边界,gambit会默认为interior。
interior是公共面(两个"体"共用)interface是接触面(两个面,分别属于不同的"体"):interface是处理滑移网格,静止部分与滑动部分的交接,也用于流体与固体耦合的时候用;还可以用来连接粗细不同的网格体。
若用split剖分体时,要选择“connected”选项,否则FLUENT会将交界面默认为壁面(wall)。
两个体的交界面重合的部分需要有流体流通,即不能用wall处理。
这种情况有两种解决办法。
1:交界面重合部位有两个面,一个属于A,一个属于B,然后分别定义为interface(如名称为interface1和interface2),这两个面的网格不需要一致,然后到fluent里define/grid interface里将两个交界面create成一个。
2:(交界面必须一样大小)在gambit中选择geometry/face/connect faces 命令,激活virtual(Tolerance),激活T—Junctions,选择两个体的交界面,点击Apply。
两个体的重合面线条颜色为粉红色,OK。
然后可以进行体的网格划分。
这样两个体的交界面重合部分网格一致,默认为interior,允许流体通过。
下面是CFD-Online上的一些说法,仅供参考。
the interface condition is needed for connecting different grid in a model, non matching interface, sliding mesh interface, and so on.Sliding mesh interface : use in the sliding mesh model, one part of the mesh will move regarding to the other.Different grid interface : for connecting different kind of grid without transition. for exemple, hexa with tetra without pyramidal element. Fluent interpolate the result a mesh interface from one grid to the other.Non matching interface : grid with diferent shape and/or with different position of their nodes. If you have the fluent tutorials take a look at the film cooling exemple.the interior condition is usefull if you have surfaces in you model which are part of the fluid. If you don't use interior condition gambit can considerer them as wall.the internal condition is quite the same as interior but it will be merge in the adjacent interiors in the final mesh if you use tgrid. I think that this condition is useless if you use gambit.粉红色表明:有一个剖面,是体的分界面。
关于计算机图形学的期末论文计算机图形属于一门计算机技术,计算机图形学是一种使用数学算法把二维或三维图形转化为计算机显示器的栅格形式的科学。
下面是店铺为大家整理的关于计算机图形学的论文,希望能对大家有所帮助计算机图形学的论文篇一:《关于计算机图形学的发展及应用探究》【摘要】计算机图形学经过三十多年的发展,在计算机艺术、计算机动画、自然景物仿真、图形实时绘制的方面都有很大程度的成就。
图形学发展速度很快,并且已经成为一门独立的学科,应用前景非常广阔,本文就计算机图形学的发展及应用研究探讨,希望能帮助有所需要的人。
【关键词】计算机图形学;发展状况;应用什么是计算机图形学?简单地说,计算机图形学的主要研究内容就是研究如何在计算机中表示图形、以及利用计算机进行图形的计算、处理和显示的相关原理与算法。
计算机图形学又称CG,计算机图形学研究的是如何在计算机环境下生成图形、处理图形、显示生成图形的一门学科,其基本构成是逐步实现对图形的处理和设计工作。
计算机图形学研究的内容极其繁多,如曲线曲面建模、图像制作指标、人机交换系统、计算机的硬件系统、风景渲染、电子动画、图形交换技术、真实感图形显示算法、虚拟现实、图形硬件等。
随着该项技术的不断发展,它在计算机科学中最为活跃的分支之一,并得到广泛的应用。
现在介绍计算机图形学的研究内容、发展历史、应用和图形学前沿的方向。
一、计算机图形学的发展史20世纪50年代,第一台拥有图形显示技术的计算机在美国麻省理工学院诞生,该显示器只能显示一些简单的图形。
在50年代,只有电子管计算机,用机器语言编程,主要应用于科学计算,为这些计算机配置的图形设备仅具有输出功能。
1962年,MIT林肯实验室的I-van.E.Sutherland发表一篇博士论文,他在论文中首次使用了计算机图形学“ComputerGraphics”这个术语,确定了计算机交互图形学作为一个崭新的科学分支的独立地位。
到20世纪70年代,光栅图形学迅速发展,区域填充、裁剪、消隐等基本图形的概念及其相应算法纷纷诞生,使得图形学得到了广泛的应用。
gambit网格划分基本类型:(一)Mesh Face :面划分Element :Quad:四边形网格Tri:三角形网格Quad/Tri:四边形和三角形网格混合Type :1、map:建立规则的四边形结构性网格2、submap:将不规则的区域划分为几个规则的区域3、pave:非结构性网格4、Tri Primitive:将一个三角形区域划分为三个四边形区域,并同时划分为四边形网格5、Wedge Primitive:将一个楔形的尖端划分为三角形网格,沿着楔形向外辐射,划分为四边形网格(二)Mesh Volume:体划分Element :Hex:六面体网格Hex/Wedge:以六面体为主,在适当的位置包括楔形网格Tet/Hybrid:以四面体为主,在适当的位置上包括六面体、锥形和楔形网格Type :1、map:建立规则的结构化六面体网格2、submap:将不可结构化划分的体积进行分割,再建立map网格3、tet primitive:将四面体分成多个六面体,再对各区域建立map网格4、cooper:通过源面对整个体进行网格样式的扫描,适用于逻辑圆柱体5、stairstep:建立规则六面体网格和相应的微小体积来近似原来的几何体形状,椭圆体。
6、tgrid:将网格指定为四面体元素,但是在适当处可能包括六面体、金字塔形和楔形网格划分方法:(一)MESH FACE FORM1、Map Scheme:4*End+N*Side(1)Periodic(周期性) map Scheme: N*Side,针对圆柱面(2)Face(面)Mapple操作方法:(1)打开“Face Vertex form”对话框,选择用圆圈标注的点,将其修改为“S”类型;然后,打开“Mesh Face Form”对话框,划分网格。
或者(2)在“Mesh Face Form”对话框中,直接将schemme(框架)修改为“Map”。
4*End+L*Side+M*End+Corner+N*2*End+Reverse2、Submap:()()修改方法同2:“E ”改成“S ”。
FLUENT知识点解析
1.网格生成:
在使用FLUENT进行模拟之前,首先需要生成一个合适的网格。
网格
的划分对于模拟结果的准确性和计算效率都有很大的影响。
FLUENT提供
了多种网格生成方法,包括结构化网格和非结构化网格。
结构化网格适用
于简单几何形状,而非结构化网格适用于复杂几何形状。
2.边界条件:
在模拟中,需要设置合适的边界条件来模拟真实物理系统中的边界行为。
常见的边界条件包括:壁面条件、入口条件、出口条件和对称条件。
根据具体情况,可以根据需要自定义边界条件。
3.流动模型:
4.输运方程:
FLUENT使用质量守恒、动量守恒和能量守恒方程来描述流体流动和
传热过程。
质量守恒方程包括连续性方程,动量守恒方程包括Navier-Stokes方程,能量守恒方程包括热传导和对流传热方程。
根据具体问题,可以选择合适的输运方程进行模拟。
5.数值解算方法:
6.辅助模型:
7.后处理:
FLUENT提供了丰富的后处理功能,用于分析和可视化模拟结果。
通
过后处理,可以绘制流速矢量图、压力分布图、温度分布图等,以及计算
流量、阻力系数、换热系数等物理量。
此外,在后处理过程中,还可以进行轨迹计算、剪切应力计算等。
8.并行计算:
9.耦合求解:
以上是FLUENT的一些重要知识点解析。
FLUENT作为一款强大的CFD 软件,具有广泛的应用前景。
在使用FLUENT进行模拟时,需要了解和掌握以上知识点,以确保模拟结果的准确性和可靠性。
Ansys Icepak网格划分原则(-)网格类型网格划分是仿真的第二步,是所有仿真求解的基础,网格质量的好坏直接决定了求解计算的精度和收敛性。
优质的网格可以保证CFD计算的精度,其主要表现在以下几个方面:(1)网格必须贴体,即划分的网格必须将模型本身的几何形状描述出来,以保证模型的几何形状不失真;(2)可以对固体壁面附近的网格进行局部加密,这是因为任何物理变量在固体壁面附近的梯度都比较大,壁面附近网格由密到疏,才能够将不同物理量的梯度进行合理的捕捉;(3)网格的各种质量指标需满足Icepak的要求。
为了得到更优质的网格,Icepak提供了包括Mesher-HD(六面体占优)、Hexa Unstructured(非结构化网格)、Hexa Cartesian(结构化网格)在内的多种网格划分形式。
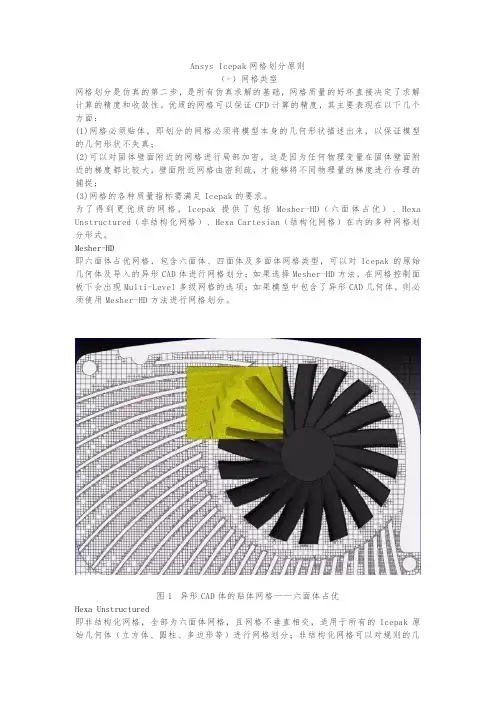
Mesher-HD即六面体占优网格,包含六面体、四面体及多面体网格类型,可以对Icepak的原始几何体及导入的异形CAD体进行网格划分;如果选择Mesher-HD方法,在网格控制面板下会出现Multi-Level多级网格的选项;如果模型中包含了异形CAD几何体,则必须使用Mesher-HD方法进行网格划分。
图1异形CAD体的贴体网格——六面体占优Hexa Unstructured即非结构化网格,全部为六面体网格,且网格不垂直相交,适用于所有的Icepak原始几何体(立方体、圆柱、多边形等)进行网格划分;非结构化网格可以对规则的几何体进行贴体划分;非结构化网格可以使用O-grid网格对具有圆弧特征的几何体进行贴体的网格划分,因此非结构化网格在Icepak电子热模拟中应用的非常广泛。
Hexa Cartesian即结构化网格,所有的网格均为垂直正交,三维的实体网格可以在坐标系方向进行编号标注。
由于这种网格在模型的弧线边界会出现stair-stepped阶梯状网格,因此只适用于对类似于方体的几何模型记性贴体网格划分,而对具有弧线和斜面等特征的几何体则无法得到贴体网格。

tecplot 数据文件格式引言概述:Tecplot数据文件格式是一种常用的科学数据可视化文件格式。
它被广泛应用于各个领域的科学研究,包括流体力学、天气预报、地质学等。
本文将详细介绍Tecplot数据文件格式的特点、结构以及常见的数据类型。
一、Tecplot数据文件格式的特点1.1 可读性强:Tecplot数据文件采用文本格式存储数据,易于人们阅读和理解。
这种特点使得数据文件的交流和共享变得更加方便。
1.2 灵便性高:Tecplot数据文件支持多种数据类型的存储,包括网格数据、场数据、曲线数据等。
用户可以根据需求选择合适的数据类型进行存储和处理。
1.3 大数据处理能力:Tecplot数据文件格式适合于大规模数据的处理和可视化。
它可以高效地处理包含数百万个数据点的大型数据集,满足科学研究中对大数据处理的需求。
二、Tecplot数据文件格式的结构2.1 文件头部份:Tecplot数据文件的头部包含了文件的基本信息,如文件版本、标题、变量名等。
这些信息对于数据的解释和使用具有重要意义。
2.2 数据描述部份:数据描述部份定义了数据的结构和布局,包括网格的拓扑结构、坐标信息、变量类型等。
这些信息对于数据的可视化和分析起着关键作用。
2.3 数据值部份:数据值部份存储了实际的数据数值。
根据数据类型的不同,数据可以以二维数组、三维数组或者一维数组的形式进行存储。
三、常见的数据类型3.1 网格数据:Tecplot数据文件可以存储各种类型的网格数据,包括结构化网格和非结构化网格。
结构化网格由规则的网格单元组成,而非结构化网格则由不规则的网格单元组成。
3.2 场数据:场数据是指在网格上定义的物理量,如速度、温度等。
Tecplot数据文件可以方便地存储和处理各种类型的场数据。
3.3 曲线数据:曲线数据是指在二维坐标系中表示的曲线。
Tecplot数据文件可以存储多个曲线,并支持曲线的可视化和分析。
四、Tecplot数据文件的应用领域4.1 流体力学:Tecplot数据文件在流体力学领域中得到了广泛的应用。
hypre矩阵存储格式介绍在计算科学和工程领域,矩阵是一个重要的数学概念,广泛应用于线性代数、优化算法、图论等领域。
在高性能计算中,矩阵的存储格式对于提高计算效率和减少内存占用非常关键。
其中,hypre是一种常用的并行线性求解器库,提供了丰富的矩阵存储格式和求解算法。
矩阵存储格式的重要性矩阵是一个二维数组,通常由大量的元素组成。
在计算过程中,需要频繁地访问这些元素。
而不同矩阵存储格式的选择会直接影响到访问元素的效率和内存占用。
因此,选择合适的矩阵存储格式对于提高算法的性能和可扩展性非常重要。
常用的矩阵存储格式1. Dense(稠密矩阵)稠密矩阵是最简单的矩阵存储格式之一,它将每个元素都存储在一个数组中。
这种格式适用于矩阵稠密,即大部分元素非零的情况。
2. Compressed Sparse Row (CSR,压缩稀疏行)CSR格式是一种常见的稀疏矩阵存储格式。
它将矩阵分为三个数组:data、indices和indptr。
其中,data存储非零元素的值,indices存储非零元素的列索引,indptr存储每行第一个非零元素的索引。
3. Compressed Sparse Column (CSC,压缩稀疏列)CSC格式与CSR格式类似,只是将行索引和列索引的位置互换。
同样,它也由data、indices和indptr三个数组组成。
4. Ellpack-Itpack (ELLPACK,基于点对块的稀疏矩阵)ELLPACK格式将矩阵分块存储,其中每个块由点对的形式表示。
ELLPACK格式适用于稀疏矩阵,并且可以在计算过程中提高数据访问的局部性。
5. Block Sparse Row (BSR,块稀疏行)BSR格式将矩阵划分为块,并且每个块内部也是按照稀疏矩阵的方式存储。
这种格式适用于稀疏模式规则且块结构明显的矩阵。
6. Hybrid (混合格式)混合格式是不同矩阵存储格式的混合使用。
它充分利用了各种格式的优点。
FLUENT入门Fluent必知的一些基本概念!1、连续性方程不收敛是怎么回事?在计算过程中其它指数都收敛了,就continuity不收敛是怎么回事?答:这和Fluent程序的求解方法SIMPLE有关。
SIMPLE根据连续方程推导出压力修正方法求解压力。
由于连续方程中流场耦合项被过渡简化,使得压力修正方程不能准确反映流场的变化,从而导致该方程收敛缓慢。
你可以试验SIMPLEC方法,应该会收敛快些。
2、湍流与黏性有什么关系?答:湍流和粘性都是客观存在的流动性质。
湍流的形成需要一定的条件,粘性是一切流动都具有的。
流体流动方程本身就是具非线性的。
NS方程中的粘性项就是非线性项,当然无粘的欧拉方程也是非线性的。
粘性是分子无规则运动引起的,湍流相对于层流的特性是由涡体混掺运动引起的。
粘性是耗散的根源,实际流体总是有耗散的。
而粘性是制约湍流的。
湍流粘性系数和层流的是不一样的,层流的粘性系数基本可认为是常数,可湍流中层流底层中粘性系数很小,远小于层流时的粘性系数;而在过渡区,与之相当,在一个数量级;在充分发展的湍流区,又远大于层流时的粘性系数.这是鲍辛内斯克1987年提出的。
3、FLUENT的初始化面板中有一项是设置从哪个地方开始计算(compute from),选择从不同的边界开始计算有很大的区别吗?该怎样根据具体问题选择从哪里计算呢?比如有两个速度入口A 和B,还有压力出口等等,是选速度入口还是压力出口?如果选速度入口,有两个,该选哪个呀?有没有什么原则标准之类的东西?答:一般是选取ALL ZONE,即所有区域的平均处理,通常也可选择有代表性的进口(如多个进口时)进行初始化。
对于一般流动问题,初始值的设定并不重要,因为计算容易收敛。
但当几何条件复杂,而且流动速度高变化快(如音速流动),初始条件要仔细选择。
如果不收敛,还应试验不同的初始条件,甚至逐次改变边界条件最后达到所要求的条件。
4、要判断自己模拟的结果是否是正确的,似乎解的收敛性要比那些初始条件和边界条件更重要,可以这样理解吗?也就是说,对于一个具体的问题,初始条件和边界条件的设定并不是唯一的,为了使解收敛,需要不断调整初始条件和边界条件直到解收敛为止,是吗?如果解收敛了,是不是就可以基本确定模拟的结果是正确的呢?答:对于一个具体的问题,边界条件的设定当然是唯一的,只不过初始化时可以选择不同的初始条件(指定常流),为了使解的收敛比较好,我一般是逐渐的调节边界条件到额定值("额定值"是指你题目中要求的入口或出口条件,例如计算一个管内流动,要求入口压力和温度为10MPa和3000K,那么我开始叠代时选择入口压力和温度为1MPa和500K(假设,这看你自己问题了),等流场计算的初具规模、收敛的较好了,再逐渐调高压力和温度,经过好几次调节后最终到达额定值10MPa和3000K,这样比一开始就设为10MPa和3000K收敛的要好些)这样每次叠代可以比较容易收敛,每次调节后不用再初始化即自动调用上次的解为这次的初始解,然后继续叠代。
FLUENT全参数设置FLUENT是一款流体力学仿真软件,用于通过求解流动和传热问题来模拟和分析各种工程现象。
在使用FLUENT进行仿真之前,我们需要进行全参数设置,以确保所得到的结果准确可靠。
本文将介绍FLUENT的全参数设置,并提供一些适用于新手的建议。
1.计算网格设置:计算网格是FLUENT仿真中最重要的因素之一、合适的网格划分能够很好地表达流场和传热场的特征。
在设置计算网格时,可以考虑以下几个因素:-网格类型:可以选择结构化网格或非结构化网格。
结构化网格具有规则排列的单元,易于生成和细化。
非结构化网格则适用于复杂的几何形状。
-网格密度:根据仿真需求和计算资源的限制,选择合适的网格密度。
一般来说,流动和传热现象较为复杂时,需要更密集的网格划分。
-边界层网格:在靠近流体边界处增加边界层网格可以更准确地捕捉边界层流动的细节。
-剪切层网格:对于具有高速剪切层的流动,应添加剪切层网格以更好地刻画流场。
2.物理模型设置:- 湍流模型:选择合适的湍流模型,如k-epsilon模型、Reynolds Stress Model(RSM)等。
根据流动领域的特点,选用合适的湍流模型能够更准确地预测湍流现象。
- 辐射模型:对于辐射传热问题,可以选择合适的辐射模型进行建模。
FLUENT提供了多种辐射模型,如P1模型、Discrete Ordinates模型等。
-传热模型:根据具体问题,选择适当的传热模型,如导热模型、对流传热模型等。
在选择传热模型时,需要考虑流体性质和边界条件等因素。
3.数值方法设置:数值方法的选择和设置对仿真结果的准确性和稳定性有很大影响。
以下是一些建议:-离散格式:选择合适的离散格式进行数值计算。
一般来说,二阶精度的格式足够满足大多数仿真需求。
-模拟时间步长:选择合适的模拟时间步长以保证数值稳定性。
一般来说,时间步长应根据流场的特性和稳定性来确定。
-松弛因子设置:对于迭代求解的过程,设置合适的松弛因子能够提高求解的收敛速度。
ICEM与HyperMesh对比1ICEM强大的功能优势及卖点1.1ICEM强大的几何模型修复功能➢自动诊断并以颜色显示几何拓扑关系,自动清除重合对象,提供大量几何简化和修复工具处理曲线、孔、曲面、装配面、缝隙等局部细小特征和“污点”,确保修复后的模型生成高质量的网格➢拓扑重建、填充孔、清除孔、闭合缝隙、缝合装配边界、延伸面、劈分折叠面、面法向调整……1.2高级网格划分和网格处理功能➢丰富的网格划分方式➢非结构化智能网格:快速形成四面体网格➢三棱柱附面层网格:在四面体网格基础上快速生成三棱柱边界层网格(四面体网格收缩,三棱柱网格“长出”)➢结构化网格雕塑:在复杂结构中构造子块拓扑空间(Block),可将任意复杂的形体划分成映射六面体网格。
映射技术对几何模型的质量要求极低:自动修补几何表面的裂缝或洞、虚拟拓扑可将零散小面自动组合成一个整体面、自动忽略细微结构……,从而生成光滑的贴体网格➢结构化/非结构化混合网格:在连接处自动生成金字塔单元➢O-形网格技术:自动生成六面体边界层单元1.3独具特色的网格处理工具➢网格预报:网格密度控制、尺寸显示、预报节点、单元个数➢拖拉网格工具:法向、路径、矢量及旋转拖拉网格➢忽略细节特征设置:跨越补丁、包络面技术➢一劳永逸的Replay技术:对几何尺寸改变后的几何模型自动重划分网格➢网格“光滑”功能,对已有的网格进行均匀化处理,大大提高网格质量1.4网格编辑和检查功能➢网格检查和质量诊断工具➢修补处理:重划分(坏)单元、定位孔、填充孔、缝合边缝、光滑和装配界面网格协调➢网格变换:平移、旋转、镜面与缩放➢网格劈分:节点劈分、单元劈分、边界劈分和边界转换➢合并节点:合并交点或临近点➢移动节点:交点、增量、投影…➢密度调整:网格加密和网格粗化➢删除/增加节点、单元和中节点➢颠倒/重新指定体、面单元方向➢类型转换2Hypermesh功能简介HyperMesh是一个高效的有限元前后处理器,能够建立各种复杂模型的有限元和有限差分模型,与多种cad和cae软件有良好的接口并具有高效的网格划分功能。
2.2.3 划分面的网格Gambit对于二维面的网格的划分提供了三种网格类型:四边形、三角形和四边形/三角形混合,同时还提供了五种网格划分的方法。
表1、2分别列举了五种网格划分的方法以及它们的适用类型。
表2上面列举的每一个Elements选项都与一组特定的Type选项相关(见下面)。
指定格式类型如上所述,每个Elements选Type项与一组特定的一个或者多个Type选项相关。
下表中显示了每个体积网格划分Elements和选项之间的对应关系。
(注意:以"X"标记的阴影单元代表选项的允许组合。
)上表中显示的每个允许组合都构成了对于任意给定体积的一种独特的网格节点形式。
另外,每个组合与一组控制可以应用的体积类型的限制相关联。
以下部分强详细介绍上面列举的可能的选项组合的形式和相关的限制。
注意(1):在上面列举的Type选项中,仅仅选项与多个Elements选项相关。
因此,在以下部分中,体积网格划分格式类型仅仅在它们相应的Type名称上相互有差别——例如,Tet Primitive。
注意(2):当用户在Mesh Volumes窗口中指定一个体积时,GAMBIT将自动评估该体积关于形状、拓扑结构特点以及顶点类型并设置Scheme选项按钮来反应一种要求的体积网格划分格式。
如果用户为一个网格划分操作指定了多个体积,则Scheme选项按钮提供的格式将反应最近选定的体积要求的格式。
如果用户通过Mesh Volumes窗口中的Scheme选项按钮强制一种网格划分格式,GAMBIT将指定的格式应用于所有当前选定的体积。
注意(3):上面列举的一些网格划分格式生成的网格节点类型不能被主菜单条中的GAMBIT Solvers菜单包含的一些解算器使用。
下表中显示了Solvers菜单条中的可用解算器与上面列举的网格划分格式类型之间的对应关系。
(注意:FLUENT 4解算器要求一种结构化网格,NEKTON解算器要求六面体网格单元。
1、显示操作 G A M B I T 图形窗L I 显示操作既用了鼠标「个键,也用了键盘上的C t r l 键键盘■/鼠标按锻鼠标运动 捲述左键点击拖曳着描针往任-方向走I 旋转模型中键点击拖曳着描针往任-方向走移动模型 右键点击往乖豆力向地曳指针 缩啟模型 右键点击 往水平方向移动指针使模型绕着图形窗口中心旋转d 澀 拆针时角移动 放大校空,保留挾魁比例。
你放开鼠标按钮后,GAMBIT 放人了显乎a两枫中键点噩住幷新视角丽自接显/模梨 2、选中实体GAMBIT 实体选中操作有两种不同的类熨,都用到SliiEt 通过这指南向导,你将看到像“ShifH 曲-click”的表达武,这说明你左击鼠标按钮时必烦按住Sliill 两种选中密体的操作如目标,只要有_部分就町囚了“任务执行半你在圏形閤口屮ShilM 皿“hGk 操作时,GXMBIT 接受刘-个实体的选样并把它聚焦 •在农格的列表叽假如旳册的列•农时农格屮堆丽•个,Shift-right-cJbk 执行的按作与当前打 开的农格相联系,这种怙况,Shift-right-cUck 作与点击Apply 按钮的燥作功能是…样的。
3D Element类型缺省设置为方体b)在Qualitylype选项菜单屮选择kquiAnnlcSkewc)左直方图中点击--绿色的竖条”观察该品两范围内的单元每-个单元都有汁位于0到1之间的失真值"0优表理想单元•直冇图分为1D条,每一条代表失宾值的0.1Wo对一个好的网榕系统,直方图左边的条图大,而右边的条图小。
3、Gambit网格划分,交界面的处理:简单说分块划分网格,如果不定义边界,gambit会默认为interior。
interior是公共面(两个"体"共用)。
interface是接触面(两个面,分别属于不同的"体"):interface是处理滑移网格,静止部分与滑动部分的交接,也用于流体与固体耦合的时候用;还可以用来连接粗细不同的网格体。
非结构化网格可视化中一种新的点定位方法作者:杜小甫来源:《中国新通信》 2017年第13期一、概述科学计算可视化是当前各种有限元分析系统后处理过程中的重要手段,绝大多数可视化技术都是基于网格的,而网格一般可分为三类:规则网格,结构化网格,非结构化网格[1]。
规则网格又称为笛卡尔网格,它是利用二维或三维笛卡尔坐标系中具有统一外形的网格单元彼此按规律连接,铺满待分析的二维或三维物理场,构造出的网格。
在规则网格中,网格单元的编号和网格单元的位置具有直接的映射关系。
基于规则网格的各种可视化技术实现起来非常简单,但是规则网格的适应性差,不能很好的描述真实的物理实体。
结构化网格又叫非规则结构化网格,可以看作规则网格变形得到的网格。
结构化网格中所有内部节点都具有完全相同的毗邻拓扑结构,这也是结构化网格和非结构化网格最大的区别。
例如,在结构化四边形网格中,每个非边界节点必定是四个四边形网格单元的公共顶点,而在非结构化网格中,某个非边界节点可能是四个、五个、六个、七个四边形网格单元的公共顶点。
结构化网格可以通过坐标变换转化为规则网格,而结构化网格的适应性比规则网格强很多,可以更好的描述客观实体。
但是结构化网格还是有很多缺点,导致他逐渐被历史淘汰。
首先结构化网格的适应性比非结构化网格要差,对于具有复杂外形的物理实体的描述能力弱。
另外在某些情况下结构化网格的质量很差,例如圆形物理场的结构化网格可以采用极坐标方式转化规则网格得到,这种网格在圆心附近的网格单元尺寸非常小,而在圆周附近的网格单元尺寸又非常大。
因为以上原因,在现有的各类有限元分析系统中,绝大多数都采用了非结构化网格。
我们讨论的非结构化网格要符合如下特征:1、每个网格单元的外形拓扑结构都是一致的,例如在四节点四边形网格中,每个网格单元都是一个具有四个顶点的四边形。
2、每个网格节点的位置坐标没有精确的规律。
这一点造成的后果是每个网格单元会发生一定程度随机的形变。
Flow Simulation的网格技术Flow Simulation是以SolidWorks作为平台的CFD分析软件,它与其他主流的CFD分析软件一样,采用有限体积法。
即将计算区域划分为一系列不重复的控制体积,并使每个网格点周围有一个控制体积;将待解的建立在流体动力学现象的微分方程对每一个控制体积积分,便得出一组离散方程。
这个控制体积可以简单的理解为网格。
划分网格是CDF分析中比较关键的一步,它关系到分析结果的精度。
这就值得我们去讨论Flow Simulation的网格技术了。
一 网格的要求和选择我们在做任何CFD分析,都要对计算区域进行离散,即划分网格。
网格是CFD 模型的几何表达形式,也是模拟与分析的载体。
网格质量对CFD计算精度和计算效率有很大的影响。
因此,我们对网格的划分要有足够的关注。
1 网格排列网格分为结构网格和非结构网格两大类。
结构网格即网格中节点排列有序、邻点间的关系明确,如图1所示。
图1 结构网格与结构网格不同,在非结构网格中,节点的位置无法用一个固定的法则予以有序地命名。
图2是非结构网格示例。
这种网格虽然生成过程比较复杂,但却有着极好的适应性,尤其对具有复杂边界的流场计算问题特别有效。
非结构网格一般通过专门的程序或软件来生成。
另外,在某一区域内结构化网格与其它结构化网格以某种方式结合的网格,这种网格成为部分非结构化网格。
图2 非结构网格2 网格单元的分类单元是构成网格的基本元素。
在结构网格中,常用的2D网格单元是四边形单元,3D网格单元是六面体单元。
而在非结构网格中,常用的2D网格单元还有三角形单元,3D网格单元还有四面体单元和五面体单元,其中五面体单元还可分为棱锥形(或楔形)和金字塔形单元等。
图3和图4分别示出了常用的2D和3D网格单元。
图3 常用的2D网格单元图4常用的3D网格单元另外,立方体形式的六面体网格,其网格面与笛卡儿坐标系中的X、Y、Z 轴相平行。
而这种网格经过某种扭曲后,可以很好的跟物体表面贴合。
1. 什么是结构化网格和非结构化网格
1.1结构化网格
从严格意义上讲,结构化网格是指网格区域内所有的内部点都具有相同的毗邻单元。
它可以很容易地实现区域的边界拟合,适于流体和表面应力集中等方面的计算。
它的主要优点是:
网格生成的速度快。
网格生成的质量好。
数据结构简单。
对曲面或空间的拟合大多数采用参数化或样条插值的方法得到,区域光滑,与实际的模型更容易接近。
它的最典型的缺点是适用的范围比较窄,只适用于形状规则的图形。尤其随着近几年的计算机和数值方法
的快速发展,人们对求解区域的几何形状的复杂性的要求越来越高,在这种情况下,结构化网格生成技术
就显得力不从心了。
1.2非结构化网格
同结构化网格的定义相对应,非结构化网格是指网格区域内的内部点不具有相同的毗邻单元。即与网格剖
分区域内的不同内点相连的网格数目不同。从定义上可以看出,结构化网格和非结构化网格有相互重叠的
部分,即非结构化网格中可能会包含结构化网格的部分。
2.如果一个几何造型中既有结构化网格,也有非结构化网格,分块完成的,分别生成网格后,也可以直接
就调入fluent中计算。
3.在fluent中,对同一个几何造型,如果既可以生成结构化网格,也可生成非结构化网格,当然前者要比
后者的生成复杂的多,那么应该选择哪种网格,两者计算结果是否相同,哪个的计算结果更好些呢?
一般来说,结构网格的计算结果比非结构网格更容易收敛,也更准确。但后者容易做。
影响精度主要是网格质量,和你是用那种网格形式关系并不是很大,如果结构话网格的质量很差,结果同
样不可靠,相对而言,结构化网格更有利于计算机存储数据和加快计算速度。
结构化网格据说计算速度快一些,但是网格划分需要技巧和耐心。非结构化网格容易生成,但相对来说速
度要差一些。
4.在gambit中,只有map和submap生成的是结构化网格,其余均为非结构化网格。
采用分块网格划分的时候,在两个相邻块之间设置了connected,但是这两个块
我要用不同尺寸的网格来划分。比如说我用结构化的六面体网格来划分,一遍的
尺寸为2,另一边的尺寸为3,这时候公共边界面该怎么处理?如果采用cooper
的格式来划分这个网格,尺寸就是前面所说的,该怎么来做呢?
我用单独的两个块试过,就是在公共边界上采用interface的格式,但是由于与
这个公共边界相邻的另一个边界也不得不用interface格式,结果导入fluent
的时候就说can not creat a bound loop,也不清楚这是什么问题。
如果中间面两侧的面网格一致,可以直接在fluent中merge,如果不一致,可以设interface
网格的正交性是指三个方向上的网格边之间互相垂直的程度。一般而言,三维网格单元中,
三个方向上的网格边之间的夹角越接近90度则质量越好。这一点在规则区域(例如正方形方
腔)很容易实现,但对于流动区域比较复杂的问题则非常困难。但一般情况下,应当保证所
有的网格单元内的网格边夹角大于10度,否则网格本身就会引入较大的数值误差。
EquiSize Skew(尺寸扭曲率)和EquiAngle Skew(角度扭曲率)是评判网格质
量最主要标准,其值越小,网格质量越高
一般来说,Fluent要求扭曲率3D小于0.85,2D小于0.75。
关于复杂模型和gambit中的实体及虚体
模型比较复杂,是在pro/E中建的模,然后用igs导入gambit,不过这样就产
生了很多碎线和碎面并且在一些面交界的地方还存在尖角。我曾经做成功过把它
们统统merge成一个虚面,中间设置了一个可以容忍尖角的参数,也可以划分网
格,但把生成的msh文件导入fluent就会出错,这是virtual geometry的原因
还是因为尖角的原因?还有,virtual geometry和普通的真实的几何体到底有
什么区别?好像最大的区别是virtual geometry不能进行布尔操作,布尔操作
(boolean operation)又是什么?使用virtual geometry需要注意哪些问题?
virtual geometry是很头疼的问题。你把它们统统merge成一个虚面
按理说全是虚的也是可以算的。可能是因为尖角的原因,虚实最大差别:是
virtual geometry不能进行布尔操作,boolean operation即是并
对于复杂外形的网格生成,不可避免的会用到virtual geometry,virtual face ,
和virtual edge等,
1。作网格的时候,把所有的面全部合成一个虚面的做法不好,特别是对于复杂
外形的网格生成,你最好在模型变化剧烈的地方多分几个面,这样会更有效的控
制网格能够在模型表面曲率比较大的地方能够生成规则的结构或者非结构网格。
2对于你输入gambit的时候产生很多碎片的问题,你可以适当的把proe里面的
模型精度和它的公差降低,因为gambit的建模工具精度本事就不高。
3。布尔运算就是对于面与面,体与体的联合,相减等运算。这个在所有的cad
建模过程中是经常见到的问题。
4。对于虚体生成的计算网格,和实体生成的计算网格,在计算的时候没有区别,
关键是看你网格生成的质量如何,与实体虚体无关。
我在作复杂模型计算的时候,大部分都是用的虚体,特别是从其他的建模软件里
面导进来的复杂模型,基本上不能够生成实体。
至于计算的效果如何,那是你对于fluent的设置问题和网格的质量问题,与模
型无关。
可以用gambit里面的check功能检查一下你的网格质量,看看质量怎么样
实体、实面与虚体、虚面的区别
在建模中,经常会遇到实...与虚...,而且虚体的计算域好像也可以进行计算并
得到所需的结果,对二者的根本区别及在功能上的不同
对于求解是没有任何区别的,只要你能在虚体或者实体上划分你需要的网格
---------------------------------------------------------------------
-----------
gambit的实体和虚体在生成网格和计算的时候对于结果没有任何影响,实体和
虚体的主要区别有以下几点:
1。实体可以进行布尔运算但是虚体不能,虽然不能进行布尔运算,但是虚体存
在merge,split等功能。
2,实体运算在很多cad软件里面都有,但是虚体是gambit的一大特色,有了虚
体以后,gambit的建模和网格生成的灵活性增加了很多。
3。在网格生成的过程中,如果有几个相对比较评弹的面,你可以把它们通过
merge合成一个,这样,作网格的时候,可以节省步骤,对于曲率比较大的面,
可能生成的网格质量不好,这时候,你可以采取用split的方式把它划分成几个
小面以提高网格质量
fluent必知的几个关系及定义
fluent中几个压力之间的关系及定义
在fluent中会出现这么几个压力:
Static pressure(静压) Dynamic pressure(动压) Total pressure(总压)
这几个压力是空气动力学的概念,它们之间的关系为:
Total pressure(总压)= Static pressure(静压z) + Dynamic pressure(动压)
滞止压力等于总压(因为滞止压力就是速度为0时的压力,此时动压为0.)
Static pressure(静压)就是你测量的,比如你现在测量空气压力是一个大气压
而在fluent中,又定义了两个压力:
Absolute pressure(绝对压力)
Relative pressure(参考压力)
还有两个压力:
operating pressure(操作压力)
gauge pressure(表压)
它们之间的关系为:
--------------------------------------------------------------------------------
Absolute pressure(绝对压力)= operating pressure(操作压力) + gauge pressure(表
压