【CN209544303U】晶舟夹取手臂位移驱动机构【专利】
- 格式:pdf
- 大小:322.33 KB
- 文档页数:7

专利名称:晶舟夹取装置和机械手专利类型:实用新型专利
发明人:左国军,申斌,成旭,谈丽文申请号:CN202122443656.9
申请日:20211011
公开号:CN216189096U
公开日:
20220405
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种晶舟夹取装置和机械手,涉及半导体制造技术领域。
晶舟夹取装置,具体包括安装于丝杆步进电机丝杆上的丝杆螺母,丝杆螺母上设有升降板,升降板上连接有连接板,升降联动轴连接于连接板并与丝杆的侧壁相垂直,两根摆动轴与升降联动轴平行设置且均布于升降联动轴的两侧,两个传动板均套接于升降联动轴上,两个传动板远离升降联动轴的一端分别连接于不同的摆动轴;至少一对夹持组件分别连接于两根摆动轴上,夹持组件包括连接于摆动轴的夹持固定板和与夹持固定板可拆卸连接的环状夹持部。
旨在解决现有转轴晶舟夹取机构定位过程复杂,容易出现部分脱钩,导致晶舟固定不稳的技术问题。
申请人:创微微电子(常州)有限公司,常州捷佳创精密机械有限公司
地址:213000 江苏省常州市新北区机电工业园宝塔山路9号
国籍:CN
代理机构:深圳市康弘知识产权代理有限公司
代理人:胡朝阳
更多信息请下载全文后查看。
![一种晶舟操控装置[实用新型专利]](https://img.taocdn.com/s1/m/511056e902020740bf1e9b1f.png)
专利名称:一种晶舟操控装置
专利类型:实用新型专利
发明人:吴永强,陆一峰,顾佳玉,陈造卫申请号:CN200720066562.1
申请日:20070123
公开号:CN201017867Y
公开日:
20080206
专利内容由知识产权出版社提供
摘要:本实用新型公开的一种晶舟操控装置,通过夹紧晶舟顶盖来搬运晶舟,其包括操控盒及分别设置在该操控盒两侧的两机械手,所述两机械手均呈“ㄑ”状,包括上部的主动杆、及与该主动杆固定连接的夹持杆,所述操控装置具有一预备状态和一夹紧状态;所述夹持杆的末端向该操控盒的方向伸出一支撑爪。
支撑爪在夹紧状态时几乎呈水平方向设置,紧紧扣住晶舟顶盖,晶舟顶盖被卡在夹持杆与支撑爪的交接处,从而增加了晶舟操控装置的稳定性,即使有晃动,晶舟也不会轻易脱落。
申请人:中芯国际集成电路制造(上海)有限公司
地址:201203 上海市张江路18号
国籍:CN
代理机构:上海智信专利代理有限公司
代理人:王洁
更多信息请下载全文后查看。
![一种高精度夹持机械手[实用新型专利]](https://img.taocdn.com/s1/m/d77c9748284ac850ac0242a1.png)
专利名称:一种高精度夹持机械手专利类型:实用新型专利
发明人:朱冰,沈强,郑仙清
申请号:CN201820675387.4
申请日:20180508
公开号:CN208557568U
公开日:
20190301
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种高精度夹持机械手,包括若干夹杆、外壳及夹杆驱动装置,夹杆一端连接用于夹持物品的夹爪,夹杆另一端通过转轮连接圆锥台,夹杆还设有夹杆延伸段,夹杆延伸段相互铰接,夹杆延伸段的铰接部还设有扭簧,夹杆通过夹杆延伸段铰接于外壳,圆锥台外表面沿圆锥台母线方向设有导向槽,转轮连接导向槽,圆锥台端部连接用于驱动圆锥台沿轴向移动的圆锥台驱动装置,圆锥台驱动装置包括螺杆及连接于螺杆的螺纹套管,螺杆一端连接圆锥台,螺纹套管用于驱动螺纹套管转动的动力装置。
本实用新型通过机械机构,实现对夹爪精度的控制,相对于现有的传感器配合电子控制,纯机械结构具有较高的稳定性、使用寿命及较低的价格。
申请人:苏州凯莱特自动化设备有限公司
地址:215000 江苏省苏州市养育巷99号6幢107B室
国籍:CN
代理机构:南京纵横知识产权代理有限公司
代理人:董建林
更多信息请下载全文后查看。
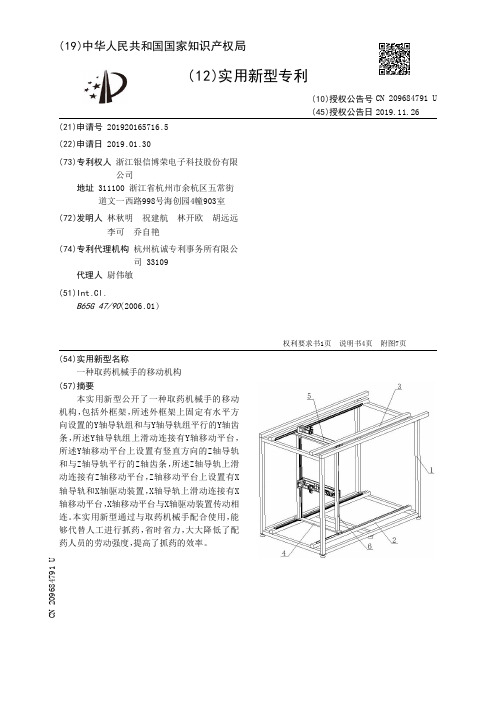
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920268164.0(22)申请日 2019.03.04(73)专利权人 成都旭升机械有限公司地址 610100 四川省成都市成都经济技术开发区(龙泉驿区)东航路528号1栋1层1号(72)发明人 刘艳敏 (74)专利代理机构 上海宏京知识产权代理事务所(普通合伙) 31297代理人 李敏(51)Int.Cl.B25J 9/10(2006.01)B25J 15/08(2006.01)(54)实用新型名称一种机械手臂(57)摘要本实用新型公开了一种机械手臂,涉及机械自动化领域,包括套筒和直角外壳,还包括改向装置、机械爪和联动臂;直角外壳固定安装在套筒的上端,套筒和直角外壳的内部左侧活动安装有推进条,套筒和直角外壳的内部右侧活动安装有联动臂,推进条和联动臂均与改向装置的左端固定连接,机械爪活动安装在改向装置的右端;本实用新型通过设置推进条,推进条带动改向装置和机械爪左右移动,改向装置能够横向或竖向调整机械爪的角度,机械爪内固定安装有电机和电动滑轨,电机既能够通过连接带动移动块移动从而控制机械爪的张开或闭合,又能够控制机械爪整体在改向装置上的横向转动,从而使本实用新型在各个方向或角度抓取物品。
权利要求书1页 说明书4页 附图4页CN 209887592 U 2020.01.03C N 209887592U权 利 要 求 书1/1页CN 209887592 U1.一种机械手臂,包括套筒(1)和直角外壳(2),其特征在于:还包括改向装置(3)、机械爪(4)和联动臂(5);所述的直角外壳(2)固定安装在套筒(1)的上端,所述的套筒(1)和直角外壳(2)的内部左侧活动安装有推进条(6),所述的套筒(1)和直角外壳(2)的内部右侧活动安装有联动臂(5),所述的推进条(6)和联动臂(5)均与改向装置(3)的左端固定连接,所述的机械爪(4)活动安装在改向装置(3)的右端。
![晶舟夹取机构的位移驱动装置[实用新型专利]](https://img.taocdn.com/s1/m/6c32014ab0717fd5370cdcb2.png)
专利名称:晶舟夹取机构的位移驱动装置专利类型:实用新型专利
发明人:王静强,黄锡钦,徐福兴
申请号:CN201920590662.7
申请日:20190426
公开号:CN209922397U
公开日:
20200110
专利内容由知识产权出版社提供
摘要:为了解决动晶舟夹取机构位移精度低的技术问题,本实用新型提供了一种包括平移驱动机构、升降驱动机构、连接杆和一对拨杆开关的晶舟夹取机构的位移驱动装置,平移驱动机构由伺服电机一、齿条、齿轮和两条直线滑轨一构成;升降驱动机构由基座、伺服电机二、滚珠丝杆副和两条直线滑轨二构成;一对拨杆开关安装在晶舟夹取机构的一对夹持臂上,拨杆开关的拨杆向下延伸至所述夹持臂的下方。
伺服电机、齿轮齿条、滚珠丝杆副的组合驱动晶舟夹取机构升降和平移,配合直线导轨导向,提高晶舟夹取机构的位移精度;同时,两个拨杆开关探测晶舟的位置,PLC根据两个拨杆开关的打开情况及时修正晶舟夹取机构的位置。
申请人:昆山基侑电子科技有限公司
地址:215000 江苏省苏州市昆山市周市镇黄浦江北路333号A-1厂房
国籍:CN
更多信息请下载全文后查看。
专利名称:一种自旋转式机械臂拾取机构
专利类型:实用新型专利
发明人:施琴,党丽峰,史银花,左文艳,张星亮,郦益多申请号:CN201822266015.9
申请日:20181231
公开号:CN209615523U
公开日:
20191112
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种自旋转式机械臂拾取机构,包括拾取机械臂架、承载联接架、伸缩机械臂架、拾取驱动电机、自旋转驱动电机、翻转联接座、伸缩气泵杆件,所述拾取机械臂架的一端、所述伸缩机械臂架的一端分别与所述伸缩机械臂架相配合联接,所述承载联接架与所述翻转联接座转动联接,所述拾取驱动电机的输出端与所述拾取机械臂架配合联接,所述自旋转驱动电机的输出端与所述翻转联接座配合联接,所述伸缩气泵杆件的两端分别配合联接所述伸缩机械臂架、所述承载联接架。
本实用新型从整体上解决了现有的机器人抓取机构多专注于直接抓取,容易对待抓取物造成划痕的技术缺陷,实现了空间自旋转功能的伸缩锁紧拾取目的。
申请人:镇江高等职业技术学校
地址:212003江苏省镇江市京口区学府路132号
国籍:CN
代理机构:南京纵横知识产权代理有限公司
代理人:董建林
更多信息请下载全文后查看。
专利名称:一种可以夹拖重物的夹臂机构
专利类型:发明专利
发明人:何芹,崔英杰,张乐朋,朱家旺,刘明,王文荣,高英豪,闵令高,辛博文
申请号:CN201710297605.5
申请日:20170428
公开号:CN106926255A
公开日:
20170707
专利内容由知识产权出版社提供
摘要:一种可以夹拖重物的夹臂机构,属于机械工程领域,是由夹臂套筒、夹臂、转轴、大蜗轮、小蜗轮、电动推杆、蜗杆、夹持电机、底板所组成的,其特征在于:夹持电机的转动,使小蜗轮带动三个同轴加工的蜗杆转动,蜗杆又带动了大蜗轮的转动,大蜗轮转动可以带动转轴的运动,转轴又可以带动夹臂旋转,使得原本在同一直线上的两个夹臂逐渐旋转运动,夹臂间的重物会随着夹臂逐渐转动而慢慢被托起。
在转轴下方有一电动推杆固定在底板上,当夹臂托起重物停止时,电动推杆收到命令,推出,插入夹臂的孔中。
该发明可以有效的使重物托起,结构简单,成本低廉,易于实现,安全性好,并且能够减少夹臂外筒与轮胎间的磨损。
申请人:山东建筑大学
地址:250101 山东省济南市临港开发区凤鸣路1000号山东建筑大学
国籍:CN
更多信息请下载全文后查看。
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201820070174.9(22)申请日 2018.01.16(73)专利权人 苏恒地址 236800 安徽省亳州市谯城区帝景华庭9号楼2单元203户(72)发明人 不公告发明人 (51)Int.Cl.B25J 15/08(2006.01)B65G 47/74(2006.01)(54)实用新型名称一种机械臂夹取装置(57)摘要本实用新型公开了一种机械臂夹取装置,包括机械臂、机械爪和机械支架,所述机械臂的一端连接机械支架,所述机械支架活动连接机械爪的一端,所述机械支架的下方设有一放置箱,所述机械爪包括上方机械爪和下方机械爪,所述上方机械爪设有第一卡扣,所述第一卡扣位于上方机械爪的端部,所述下方机械爪的底部开设凹槽,槽腔内设有滑块,所述滑块间连接有弹簧,所述滑块上设有第二卡扣,所述下方机械爪的外侧设有连杆。
本实用新型结构简单,当机械爪夹取药材少于机械爪范围时,使用滑块结构遮挡整个机械爪范围,当超出机械爪范围时,调节机械爪外的横杆距机械爪的距离,从而扩大布袋的遮挡范围,同时机械爪上方可固定雨布,有防雨作用。
权利要求书1页 说明书3页 附图2页CN 208005708 U 2018.10.26C N 208005708U1.一种机械臂夹取装置,包括机械臂(1)、机械爪(2)和机械支架(3),所述机械臂(1)的一端连接机械支架(3),所述机械支架(3)活动连接机械爪(2)的一端,所述机械支架(3)的下方设有一放置箱(4),其特征在于:所述机械爪(2)包括上方机械爪(21)和下方机械爪(22),所述上方机械爪(21)设有第一卡扣(5),所述第一卡扣(5)位于上方机械爪(21)的端部,所述下方机械爪(22)的底部开设凹槽(6),槽腔内设有滑块(7),所述滑块(7)间连接有弹簧(8),所述滑块(7)上设有第二卡扣(9),所述下方机械爪(22)的外侧设有连杆(10),所述连杆(10)通过固定装置(11)活动连接下方机械爪(22),所述固定装置(11)上设有滑动组件(12),所述连杆(10)底部开设滑槽,槽腔内设有滑件(13),所述滑件(13)通过转轴活动连接横杆(14),所述横杆(14)上设有第三卡扣(15)。
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920590237.8
(22)申请日 2019.04.26
(73)专利权人 昆山基侑电子科技有限公司
地址 215000 江苏省苏州市昆山市周市镇
黄浦江北路333号A-1厂房
(72)发明人 王静强 徐福兴 黄锡钦
(51)Int.Cl.
H01L 21/687(2006.01)
H01L 21/677(2006.01)
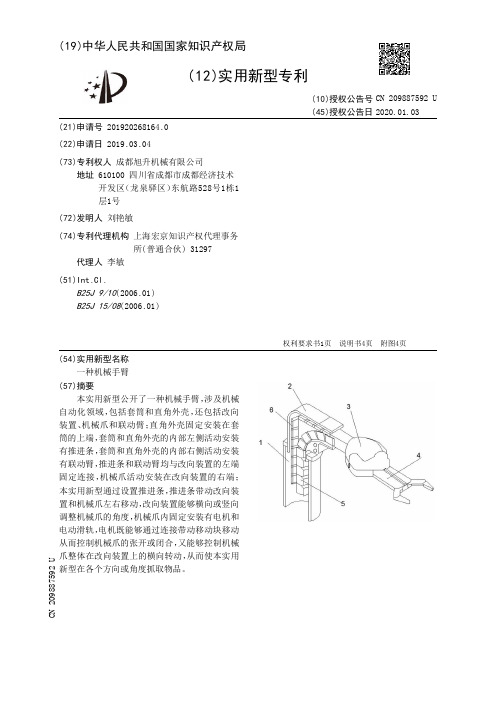
(54)实用新型名称
晶舟夹取手臂位移驱动机构
(57)摘要
为了解决动位移驱动机构造价高、晶舟夹取
手臂位移不稳、精度低的技术问题,本实用新型
提供了一种包括平移驱动机构、升降驱动机构、
旋转驱动机构和连接杆的晶舟夹取手臂位移驱
动机构。
采用伺服电机和齿轮齿条的组合驱动晶
舟夹取手臂平移,
采用伺服电机和滚珠丝杆副的组合驱动晶舟夹取手臂升降,采用伺服电机驱动
旋转,不仅制造成本低,而且平移和升降配合直
线导轨进行导向,提高了晶舟夹取手臂的位移精
度,
降低了运行噪音。
权利要求书1页 说明书3页 附图2页CN 209544303 U 2019.10.25
C N 209544303
U
权 利 要 求 书1/1页CN 209544303 U
1.晶舟夹取手臂位移驱动机构,其特征在于,包括平移驱动机构、升降驱动机构、旋转驱动机构和连接杆;
所述平移驱动机构由固定座、伺服电机一、齿条、齿轮和两条直线滑轨一构成,两条所述直线滑轨一和齿条平行固定于所述固定座上,所述齿条位于两条直线滑轨一之间,所述固定座固定在所述直线滑轨一的滑块上,所述伺服电机一固定于固定座中,所述齿轮与所述齿条啮合且固定于所述伺服电机一的输出轴上;
所述升降驱动机构由基座、伺服电机二、滚珠丝杆副和两条直线滑轨二构成,两条直线滑轨二平行且竖直地固定于所述固定座中,所述基座固定在所述滚珠丝杆副的轴套上,所述伺服电机二固定于固定座中,所述伺服电机二作为动力源带动基座升降运动;
所述旋转驱动机构由伺服电机三、转轴和两个轴承座构成,两个所述轴承座固定在所述基座上,所述转轴竖直安装在这两个轴承座之间,所述伺服电机三作为动力源带动所述转轴旋转;
所述连接杆的顶端通过联轴器安装在所述转轴的底部,底端设置有用于安装晶舟夹取手臂的安装板。
2.根据权利要求1所述的晶舟夹取手臂位移驱动机构,其特征在于,所述伺服电机二与所述滚珠丝杆副之间采用皮带组件连接。
3.根据权利要求2所述的晶舟夹取手臂位移驱动机构,其特征在于,所述伺服电机三与所述转轴之间采用皮带组件连接。
4.根据权利要求3所述的晶舟夹取手臂位移驱动机构,其特征在于,位于上方的轴承座的顶部设置有支架,所述伺服电机三固定在所述支架上;所述转轴的外部设置有一圈挂在所述支架上的凸环。
5.根据权利要求1所述的晶舟夹取手臂位移驱动机构,其特征在于,所述连接杆由空心管和实心管构成,所述空心管的顶端通过联轴器与所述转轴连接,所述实心管从所述空心管的底端插入并采用螺栓与所述空心管固连。
6.根据权利要求5所述的晶舟夹取手臂位移驱动机构,其特征在于,所述实心管的两侧设置有凹槽,所述空心管的底部焊接有插在所述凹槽中的卡块。
2。