机床结构静刚度
- 格式:doc
- 大小:1006.50 KB
- 文档页数:11
绪论随着市场上产品更新换代的加快和对零件精度提出更高的要求,传统机床已不能满足要求。
数控机床由于众多的优点已成为现代机床发展的主流方向。
它的发展代表了一个国家设计、制造的水平,在国内外都受到高度重视。
现代数控机床是信息集成和系统自动化的基础设备,它集高效率、高精度、高柔性于一身,具有加工精度高、生产效率高、自动化程度高、对加工对象的适应强等优点。
实现加工机床及生产过程的数控化,已经成为当今制造业的发展方向。
可以说,机械制造竞争的实质就是数控技术的竞争。
本课题的目的和意义在于通过设计中运用所学的基础课、技术基础课和专业课的理论知识,生产实习和实验等实践知识,达到巩固、加深和扩大所学知识的目的。
通过设计分析比较机床的某些典型机构,进行选择和改进,学习构造设计,进行设计、计算和编写技术文件,达到学习设计步骤和方法的目的。
通过设计学习查阅有关设计手册、设计标准和资料,达到积累设计知识和提高设计能力的目的。
通过设计获得设计工作的基本技能的训练,提高分析和解决工程技术问题的能力,并为进行一般机械的设计创造一定的条件。
一、设计题目及参数1.1 题目本设计的题目是数控车床的主轴组件的设计。
它主要由主轴箱,主轴,电动机,主轴脉冲发生器等组成。
我主要设计的是主轴部分。
主轴是加工中心的关键部位,其结构优劣对加工中心的性能有很大的影响,因此,在设计的过程中要多加注意。
主轴前后的受力不同,故要选用不同的轴承。
1.2参数床身回转空间400mm尾架顶尖与主轴端面距离1000mm主轴卡盘外径Φ200mm最大加工直径Φ600mm棒料作业能力50~63mm主轴前轴承内和110~130mm最大扭矩480N·m二、主轴的要求及结构2.1主轴的要求2.1.1旋转精度主轴的旋转精度是指装配后,在无载荷,低转速的条件下,主轴前端工件或刀具部位的径向跳动和轴向跳动。
主轴组件的旋转精度主要取决于各主要件,如主轴、轴承、箱体孔的的制造,装配和调整精度。

高精密机床基础——混凝土(大理石)机床床身结构的制造方法简介机床床身是影响机床的静、动态特性的重要零件,目前存在的大多数机床床身是由铸铁材料制造而成,尽管铸铁材料的阻尼系数比碳钢大,且较容易成型,但其动刚度或抗振性不够理想。
另外,铸铁资源日渐匮乏,其制造过程消耗许多能源并且产生许多对环境的污染物,从长远来看不符合绿色制造和发展低碳经济的要求。
因此,人们开始采用硅酸盐水泥钢纤维混凝土来制造机床床身,虽然它的弹性模量和抗拉强度只有铸铁的 1/4 ~ 1/5,但它的抗振能力却是铸铁的 6 ~ 8 倍,热稳定性也较好,且资源丰富,价格便宜,但是因为其材料表面不耐切削液的腐蚀而没办法得到应用。
采用低价格的硅酸盐水泥钢纤维混凝土作为内核材料,采用高性能的环氧树脂混凝土作为表层材料,大大降低了机床床身的成本,提高了性价比。
以2009 年下半年市场材料价格为参考计算出的三种机床床身的价格比较表。
从中发现,如果在所要求刚度相同的条件下,比较三种材料机床床身的成本,机床床身会最低,灰铸铁HT300 机床床身次之,环氧树脂混凝土机床床身结构最高。
采用低价格的硅酸盐水泥钢纤维混凝土作为内核材料,采用高性能的环氧树脂混凝土作为表层材料,大大降低了机床床身的成本,提高了性价比。
混凝土机床床身结构硅酸盐水泥钢纤维混凝土内核2 和环氧树脂混凝土表层1,硅酸盐水泥钢纤维混凝土内核 2 和环氧树脂混凝土表层 1 之间的粘结面为梯形齿状表面。
环氧树脂混凝土表层 1 的厚度为 6-8mm。
制造方法,包括以下步骤:A、按照机床床身任务书设计制造床身内核模具和床身表层模具;B、先将钢纤维与水泥及骨料干式搅拌,然后根据混凝土配制手册加入水和减水剂,配制硅酸盐水泥钢纤维混凝土;C、把配制好的混凝土浇注到内核模具中;D、在环境温度 20 ~30℃和湿度 70%~ 95%的条件下固化 12 小时,脱模后将内核 2 放置于环境温度 20 ~30℃、湿度 70%~ 95%和不受强光照射的条件下 21 ~ 28 日进行时效养生;E、在表层模具中固定预埋件;F、根据混凝土配制手册配制环氧树脂混凝土;G、将内核 2 放入表层模具中,浇注环氧树脂混凝土;H、在环境温度 20 ~30℃和湿度 70%~ 95%的条件下固化 3 ~5 小时,脱模后将床身结构放置于环境温度 20 ~30℃、湿度 70%~95%和不受强光照射的条件下 48 ~ 72 小时进行时效养生。
前言为了方便对轴系的了解,下面先来了解一下轴系具体的结构组成。
1.按照轴线形状分类:轴可分为直轴、曲轴和软轴(1)直轴:直轴按外形不同可分为光轴、阶梯轴及一些特殊用途的轴,如凸轮轴、花键轴齿轮轴及蜗杆轴等。
(2)曲轴:曲轴是内燃机、曲柄压力机等机器上的专用零件,用以将往复运动转变为旋转运动,或作相反转变。
(3)软轴:软轴主要用于两传动轴线不在同一直线或工作时彼此有相对运动的空间传动,也可用于受连续振动的场合,以缓和冲击。
2.按照所受载荷性质分类:轴可分为心轴、转轴和传动轴。
(1)心轴:通常指只承受弯矩而不承受转矩的轴。
如自行车前、后轮轴,汽车轮轴。
(2)转轴:既受弯矩又受转矩的轴。
转轴在各种机器中最为常见。
(3)传动轴:只受转矩不受弯矩或受很小弯矩的轴。
车床上的光轴、连接汽车发动机输出轴和后桥的轴,均是传动轴。
3.轴结构的组成轴主要由轴颈、轴头、轴身三部分组成,见下图。
轴上被支承部分叫做轴颈;安装轮毂部分叫做轴头;连接轴颈和轴头的部分叫轴身。
一、提高轴系刚度的主要措施(一) 合理选择轴截面的形状1、采用空心轴提高强度或刚度W为空心轴截面系数。
W为实心轴截面积相同时,空心轴的强度和刚度比实心轴高。
表中I为空心轴截面的惯性矩I为实心轴截面的惯性矩。
截面系数。
D D 0.5时,采用空心轴的效果比较明显。
由图可以看出,当012、空心轴直径对强度及刚度的影响3、手转矩的轴截面必须封闭准则:受转矩的轴,截面不封闭则其承载能力显著降低。
4、轴向及周向对固定时轴截面的选择1)轴向固定时轴的截面形状的选择1、使用套筒类固定的阶梯轴:结构简单、定位可靠,轴上不需开槽、钻孔和切制螺纹,因而不影响轴的疲劳强度,一般用于零件间距离较小的场合,以免增加结构质量,轴的转速很高时不宜采用。
2、使用挡圈固定的轴:结构简单,但不能承受大的轴向力。
常用于光轴上零件的固定。
3、圆锥面轴:能消除轴与轮毂间的径向间隙,装拆较为方便,可兼做周向固定,能承受冲击载荷。
提高机器人结构刚度及关节精度的方法目前,各种机器人在人们生产生活中的应用越来越广泛,而在许多场合下机器人需具有移动的能力才能完成任务。
机器人作为最典型的机电一体化数字化装备,技术附加值高、应用范围广。
作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起着越来越重要的作用。
随着企业自动化水平的不断提高,机器人自动化生产线的市场会越来越大,将逐渐成为自动化生产线的主要形式。
标签:机器人;结构刚度;关节精度引言工业机器人是集自动控制技术、传感技术、计算机技术等多种现代先进技术于一体的智能化装备。
工业机器人从上岗一直持续不断工作,直至更换,大大提高了生产效率;在某些危险工作环境下,采用工业机器人代替工人,有效改善了劳动环境,保障了工人人身安全;由于程序控制,工业机器人定位更加精确,加工精度更高,也提高了产品的质量。
1工业机器人优势改革开放以来,我国依托丰富的劳动力资源参与国际分工,在对外贸易和经济发展方面取得了举世瞩目的成绩。
然而,随着经济的持续发展和人口红利的逐渐消失,外贸出口尤其是制造业出口面临严峻挑战,制造业急需找到新的途径以替代日益稀缺的劳动力资源。
受益于新一代信息技术的发展,工业机器人的技术和工艺日臻成熟,生产成本和使用成本快速下降,在重复性、精细化、智能化和信息化方面较人工有着显著的优势。
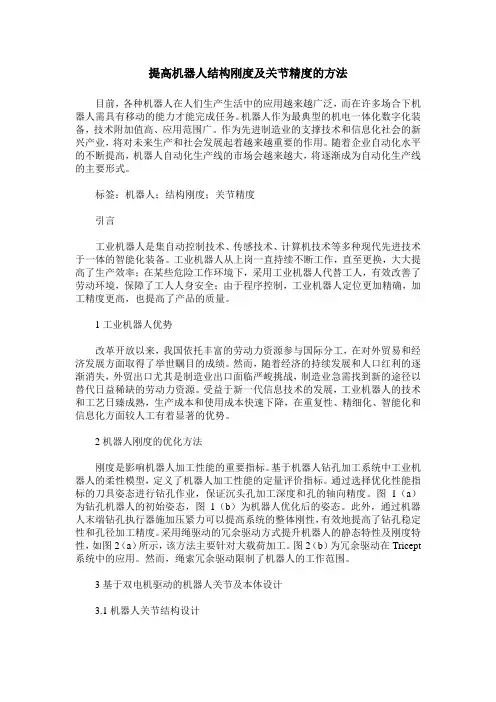
2机器人刚度的优化方法刚度是影响机器人加工性能的重要指标。
基于机器人钻孔加工系统中工业机器人的柔性模型,定义了机器人加工性能的定量评价指标。
通过选择优化性能指标的刀具姿态进行钻孔作业,保证沉头孔加工深度和孔的轴向精度。
图1(a)为钻孔机器人的初始姿态,图1(b)为机器人优化后的姿态。
此外,通过机器人末端钻孔执行器施加压紧力可以提高系统的整体刚性,有效地提高了钻孔稳定性和孔径加工精度。
采用绳驱动的冗余驱动方式提升机器人的静态特性及刚度特性,如图2(a)所示,该方法主要针对大载荷加工。
图2(b)为冗余驱动在Tricept 系统中的应用。
结构初始刚度
结构初始刚度:
静载荷下抵抗变形的能力称为静刚度。
动载荷下抵抗变形的能力称为动刚度,即引起单位振幅所需的动态力。
如果干扰力变化很慢(即干扰力的频率远小于结构的固有频率),动刚度与静刚度基本相同。
干扰力变化极快(即干扰力的频率远大于结构的固有频率时),结构变形比较小,即动刚度比较大。
当干扰力的频率与结构的固有频率相近时,有共振现象,此时动刚度最小,即最易变形,其动变形可达静载变形的几倍乃至十几倍。
构件变形常影响构件的工作,例如齿轮轴的过度变形会影响齿轮啮合状况,机床变形过大会降低加工精度等。
影响刚度的因素是材料的弹性模量和结构形式,改变结构形式对刚度有显著影响。
刚度计算是振动理论和结构稳定性分析的基础。
在质量不变的情况下,刚度大则固有频率高。
静不定结构的应力分布与各部分的刚度比例有关。
在断裂力学分析中,含裂纹构件的应力强度因子可根据柔度求得。
刚度是指材料或结构在受力时抵抗弹性变形的能力。
是材料或结构弹性变形难易程度的表征。
材料的刚度通常用弹性模量E来衡量。
在宏观弹性范围内,刚度是零件荷载与位移成正比的比例系数,即引起单位位移所需的力。
它的倒数称为柔度,即单位力引起的位移。
刚度可分为静刚度和动刚度。
第2章数控机床的典型结构与部件2.1 数控机床的结构特点及要求2.1.1数控机床的结构特点由于数控机床的控制方式和使用特点,使数控机床与普通机床在机械传动和结构上有显著的不同,其特点有:(1)采用高性能的无级变速主轴及伺服传动系统,机械传动结构大为简化,传动链缩短。
(2)采用刚度和抗振性较好的机床新结构,如动静压轴承的主轴部件、钢板焊接结构的支承件等。
(3)采用在效率、刚度、精度等各方面较优良的传动元件,如滚珠丝杠螺母副、静压蜗杆副以及塑料滑动导轨、滚动导轨、静压导轨等。
(4)采用多主轴、多刀架结构以及刀具与工件的自动夹紧装置、自动换刀装置和自动排屑、自动润滑冷却装置等,以改善劳动条件、提高生产率。
(5)采取减小机床热变形的措施,保证机床的精度稳定,获得可靠的加工质量。
2.1.2数控机床的结构要求及措施1.提高机床的静、动刚度在数控机床加工过程中,加工精度除了取决于数控系统,还取决于数控机床本身的精度。
而由机床床身、导轨工作台、刀架和主轴箱的几何精度和变形所产生的误差取决于它们的结构刚度,并且这些误差在加工过程不能进行人为的调整和补偿。
因此,必须把移动件的重量和切削力引起的弹性变形控制在最小限度之内,以保证加工精度和表面质量。
为了提高机床的静刚度,在机床结构上常采用以下措施。
1)为提高机床主轴的刚度,常采用三支承结构,并且选用刚性好的双列短圆柱滚子轴承和角接触向心推力轴承,以减小主轴的径向和轴向变形。
2)为提高机床整体的刚度,常采用筋板结构。
表2-1给出了方形截面立柱在加筋前后的静刚度比值。
从表中可以看出,加筋板后相对弯曲刚度和扭转刚度均提高。
表2-1 方形截面立柱加筋前后的静刚度比值加筋形式相对质量相对弯曲刚度相对扭曲刚度1 1 11.24 1.17 1.381.34 1.21 8.861.63 1.32 17.73)在大型数控机床中,移动载荷对机床边形有较大的影响。
常采用液压平衡和重快平衡来减少构件的变形,如图2-1所示,利用重块有效地减小主轴箱左右移动对横梁变形的影响。
闭式导轨:借助导轨副本身的封闭式结构,在变化的空间位置和受力状况下,使运动导轨和支承导轨的工作面都可能可靠接触,从而保证运动导轨的规定运动。
闭式导轨一般受温度的变化的影响较小。
支承件静刚度:静刚度等于支承件产生的静变形与承受的静载荷之比、开式导轨:借助于运动件的自重和外载荷,在一定的空间位置和受力状况下,使运动导轨和支承导轨的工作面可靠接触,从而保证运动导轨的规定运动。
开式导轨一般受温度变化的影响较小。
直线运动导轨副:支承导轨约束了运动导轨的五个自由度,仅保留沿给定轴线的移动自由度。
旋转运动导轨副:支承导轨约束了运动导轨的五个自由度,仅保留沿给定轴线的旋转运动自由度。
轴系的热特性:轴系的热特性主要参数是热源强度、温升及工作部位的热位移。
其他动压支承:是利用空气作用润滑剂的一种轴承,通过空气的弹性起支承作用,可避免固体面之间的直接接触,在轴颈和轴瓦之间形成气锲滚动导轨:滚动导轨的配对导轨面间由滚动体隔开,导轨不直接接触,运动时与滚动体产生滚动摩擦。
1>机电一体化:其含义是机械与电子的集成技术。
定义为“在设计产品或制造系统时所考虑的精密机械工程、电子控制以及系统的最佳协同组合。
“2、系统:从广义上讲,系统可以定义为两个或者两个以上的事物组成的相互作用、相互依存,共同完成某种特定功能或形成某种事物现象的一个统一整体的总称。
3、机电一体化系统:是按照系统和机电一体化的定义,所有机电一体化产品以及这些产品的集成体。
如:数控机床、传真打印机等4、系统的数学模型:描述决定系统输入与输出之间关系的数学方程式静态系统:实时输出只与当时的输入有关。
动态系统:实时输出不仅与当时的输入有关,而且与过去的输入和输出有关。
微分方程组线性系统:输入和输出满足线性叠加原理的系统。
非线性系统:输入和输出不满足线性叠加原理的系统。
定常系统:数学模型中的所有系数都是与时间无关的常量的系统。
时变系统:数学模型中含有与时间有关的系数的系统。
数控机床的精度与应用范围1.数控机床的精度数控机床的精度主要是指加工精度、定位精度和重复定位精度。
精度是数控机未的重要技术指标之一。
由于数控机床是以数字的形式给出相应的脉冲指令进行加工,数控机床的脉冲当量(即每输出一个脉冲,数控机床各运动部件的位移量或角位移量)就自然地与精度保持了某种联系。
按不同精度等级的数控机床的要求,脉冲当量通常为0.010.000 5nm/脉冲。
由于数控机床的进给传动链的反向间隙和丝杠螺距误差均可以进行自动补偿,因此数控机床一般都具有较高的加工精度。
长期的实践表明,一般中、小型数控机床(非精密型)的加工精度值约为脉冲当量的10倍,因此数控机床的加工精度通常为0.10.005mm。
在一般情况下定位精度通常是加工精度的1/2一1/3,因此数控机床的定位精度通常为0.05 -- 0.002 5mm。
而重复定位精度通常是定位精度的1/2一1/3,因此数控机床的重复定位精度通常为0.025一0.001 mm。
对于较大尺寸的零件加工的数控机床一般很注重定位精度,而对中、小型零件在考核加工尺寸的一致性时一般更注重重复定位精度。
从总体上说,由于数控机床的传动系统和机床结构具有很高的静、动刚度和热稳定性,机床本身的零部件具有很高的加工精度,特别是数控机床的自动加工方式避免了操作者人为的误差,因此同一批加工零件的尺寸一致性非常好,加工质量稳定、产品合格率高。
例如在采用点位控制的数控钻床上钻孔时,由于不再使用钻模板和钻套,钻模板的坐标误差造成的影响不复存在,又因为加工的敞开性改善了钻孔的排屑条件,可以进行有效的冷却,被加工孔的孔距精度,孔径尺寸精度和内孔表面质量均有所提高。
在数拄机床对复杂零件的轮廓表面进行加工时,由于编程中已考虑到对进给速度进行控制,保证刀具沿轮廓的切向进给的线速度基本不变,因而可以获得较高的精度和表面质量。
2.数控机床的应用范围半个世纪以来数控机床的应用范围正在不断扩大,数控技术已经渗透到许多领域。
基于2RPU/UPR并联机构的五轴混联机床设计与分析课题组基于2RPU/UPR并联机构提出了一种(2RPU/UPR+R)+P五自由度混联机构,本论文基于该混联机构设计了一种五轴混联机床结构,对其进行了运动学、静刚度及工作空间的分析。
该机床兼具并联机构刚度大、承载能力强、无累积误差以及串联机构工作空间大且运动灵活等优点,能够达到加工较高精度复杂曲面的目的。
本文主要内容如下:首先,根据加工需求,定性地对比分析了包括课题组提出的(2RPU/UPR+R)+P机构在内的几种典型五自由度机构,并最终选用课题组提出的混联机构作为五轴混联机床的机构构型。
采用螺旋理论对该新型五自由度混联机构的转轴进行分析,分析得到其具有两条连续转轴。
其次,采用闭环矢量法和D-H法分别对该混联机构的并联和串联部分进行位置正反解分析,并求得了并联部分的多组正解。
在此基础上利用齐次变换矩阵推导得到整体混联机构的正反解模型,并验证了推导结果的正确性。
再次,在假设机构仅各分支杆为柔性杆的前提下,结合螺旋理论和材料力学的知识,基于小变形叠加原理推导了各分支杆的刚度矩阵,并利用分支与机构之间的位姿变换关系,得到整体混联机构的静刚度表达式。
利用有限元软件对机构的简化模型进行受力分析,将机构末端变形值与理论值对比,两者之间偏差较小,验证了静刚度模型的正确性。
然后,在考虑移动副行程,转角的限制和分支杆干涉的条件下,利用极限边界搜索法求得混联机构的整体工作空间,并分析其工作空间特点,验证以其为构型而设计为可加工大型复杂结构件的混联机床的可行性。
最后,根据加工要求完成机床的主轴选型,进而对机床中各关键部件以及整体结构进行设计,并利用有限元软件得到机床完整模型在初始位姿和其他典型位姿下的静刚度值,并与理论值作对比,验证前文理论推导得到的静刚度模型的有效性,随后分析了机床模态,得到其固有频率和振动特性。
一、填空题1、数控机床通常是由、伺服系统、检测反馈装置、机床本体等5部分组成。
答案:程序载体、CNC装置、2、数控机床一般由控制介质、CNC、伺服系统、测量装置和机械本体五个部分组成。
3、数控机床正朝着高速、、的方向发展。
答案:高精度、高效率、高可靠性4、数控机床按伺服控制方式来划分,可以分为、半闭环控制系统种类型。
答案:开环、闭环、5、数控机床工作台等移动部件在确定的终点所达到的实际位置的精度称。
答案:定位精度6、数控机床是用数字化代码来控制的相对运动,从而完成零件的加工。
答案:刀具与工件7、_________是指用代码对机床运动及其加工过程进行自动控制的一种方法。
答案:数控技术8、常用的数控机床检测装置旋转变光栅、编码器、压器、磁栅等。
9、根据内部结构和检测方式,编码器可以分为光电式、接触式、电磁式等三种类型。
10、光栅的分辨率一般优于光电编码器,其次是旋转变压器。
11、检测环节包括检测和反馈。
12、感应同步器是一种电磁式的检测传感器,按其结构可分为直线和圆型两种。
13、伺服系统是数控机床的执行机构,它包括驱动装置和电机两大部分。
14、光栅装置的结构由标尺光栅、光栅读数头两部分组成。
15、根据数控机床滚珠丝杠的螺距来选用不同型号的编码器。
16、开环控制系统的控制精度取决步进电机和传动装置精度、。
17、旋转变压器是一种常用转角(或角位移的检测元件,从其结构来看,它由定子和转子两个部分组成。
18、旋转变压器是一种常用的转角(或角位移)检测元件。
19、如果直线式感应同步器的定尺绕组的节距为2mm,那么滑尺绕组的节距应该为2 mm才能保证检测精度。
20、莫尔条纹作用放大、平均误差。
21、数控机床中常见刀库、格子盒式。
答案:盘式、链式22、数控机床的机械部分由于采用了高性能的无级变速主轴及伺服传动系统,数控机床的机械传动结构大为简化,传动链也大大。
答案:缩短23、为减小摩擦、消除传动间隙和获得更高的加工精度,更多地采用了高效传动部件,如、答案:滚珠丝杠副、滚动导轨24、机床本体主要包括:主传动系统、滚珠丝杠螺母副和导轨、、数控回转工作台和分度工作台以及气液压系统等。
摘要为了适应机械行业的发展趋势,简化一般工厂中工人的劳动量,在本设计中应用简单的数控系统设计。
就实际情况分析,一般的机械加工精度和效率足以完成工作需求,不需要高精密的数控系统,但考虑一般机械系统实现自动化生产相对比较困难,而且实现起来相当复杂,设备比较庞大。
然而这些问题可以在一个非常简单的数控系统中很容易的得到很好的解决。
随着微型计算机系统的发展,性能的不断提高,大范围应用的普及,应用一个简单的数控系统来完成一般的工作,在一般的小型工厂中足可以实现。
本次设计的铣床,除了能进行铣削加工,主轴上安装不同的刀具时,还可以进行钻孔或攻丝加工。
所以我们采用了如下的设计方案:进给系统采用大惯量宽调速直流伺服电动机,滚珠丝杠,双螺母垫片调整预紧间隙,导轨副采用直线滚动导轨副,主传动系统采用无级调速电机。
在设计过程中,我得到了老师的精心指导,帮我收集了很多我无法找到的资料。
袁老师在完成繁重的教学任务之余,经常拖着疲惫的身体,对我们的工作进行仔细地审查,针对我们的情况,进行了耐心的讲解,从设计的原理到结构功能,做出了大量的指导性工作,使我们对所要设计的课题有了更深的了解,在这里也要感谢同组同学的热心帮助,同学们总是微笑着面对我的提问,耐心讲解,使我对有些问题有更加清楚的认识。
关键词:总体结构布局铣床传动方式主传动系统进给系统AbstractIn order to adapt to the machinery industry development trends, simplified general factory workers in the labor, in the design of a simple numerical control system design. On the actual situation analysis, the general machining accuracy and efficiency needs to complete its work, do not need high-precision numerical control system, but considering the general mechanical system to automate production is relatively difficult and very complex to achieve, equipment relatively large. However, these problems can be in a very simple numerical control system in very easy to get a good solution. With the development of micro-computer system, the continuous improvement of performance, large-scale application of the universal application of a simple numerical control system to complete the work in general, the small factories in general can be achieved in full.The processing center, in addition to a milling, spindle installed on a different tool, can also carry out drilling or tapping processing. Therefore, we have adopted the design of the programmes are as follows: feeding system using the inertia of wide speed range DC servo motor, ball screw, double-nut pads adjust preload gap, the rails of a rail line rolling deputy, the main drive system adopts the - Speed Motor.In the design process, I was given the careful guidance of teachers Hsu, To help me collect a lot I can not find the information. Yuan teachers completed the arduous task of teaching, while towing tired of the daily physical, to our work carefully review the situation against us, on a patient, from design to the principles of structure and function, to A lot of guidance, so that we have to design the machine gained a deeper understanding of the same group here also like to thank the enthusiastic help students, the students have always smiling faceof my question, patiently explained to me for some The problem is more clear understanding.Keywords:The overall structure layout Transmission Feed system Main drive system目录1绪论 (2)1.1数控机床的产生及发展 (2)1.2数控机床的组成及分类 (3)1.3数控机床的特点 (3)2设计的主要参数及基本思想 (4)2.1 课题要求 (4)2.2 总结构设计 (4)2.3 铣床总布局的确定 (5)3数铣床的设计和计算 (6)3.1 主传动系统的设计 (6)3.2 进给系统的设计 (9)3.3 进给系统的计算 (10)4 数控系统的介绍及选择 (10)4.1数控及计算机数控 (10)4.2 计算机数控系统的内部工作过程 (10)4.3数控系统的特点 (11)5 夹具的选择及介绍 (11)5.1 数控铣床夹具介绍 (11)5.2 技术要求 (12)5.3 对夹具零部件的要求 (13)结论 (15)致谢 (16)参考文献 (17)1绪论机械制造业是国民经济的支柱产业。
机械压力机强度刚度测试分析摘要:某企业一台压力机,因使用年限较长,金属结构表面有轻微的腐蚀状况,存在安全隐患,为了掌握该压力机金属结构的技术状况,本文通过对整机进行动静态强度刚度测试和无损检测,获取压力机的强度刚度分布和变化信息,根据测试结果分析完成整机的安全评估并提出合理的管理建议。
关键词:压力机;静态强度刚度测试;动态强度刚度测试;安全评估引言某企业一台压力机已服役多年,日常使用频率高、工作级别高,因在现场工作易受腐蚀,存在安全隐患。
上述不利条件对压力机金属结构的安全性和可靠性产生不同程度的影响,设备安全运行的风险也随之增加。
本文通过对整机进行静态和动态强度刚度测试以及无损检测,对压力机金属结构进行一次全面的检测,进一步确定金属结构是否满足继续服役的安全要求,并依据测试结果提出改进方案。
1压力机简介压力机主要由大车行走机构、起升机构、小车运行机构组成,主要技术参数有额定压力量、起升速度、起升高度、大小车运行速度以及工作跨度。
本文所研究设备的技术参数如表1所示。
为了研究开式单点压力机强度和刚度状况,对其进行静、动态应力、变形测试。
机床动态载荷工况下的动态特性、测试仪器设备及其测量范围精度如表1所示。
表1 设备和检测范围精度2测试方法理论2.1静态应力测试对于静态测试主要采用YE2539高速静态应变仪采集贴在机床上的 Br120-2AA电阻应变片电阻的变化,并将电阻应变片组成测量电桥,当桥臂电阻变化时,电桥就输出一个和其变化大小成线性关系的电压。
通过对该电压进行放大,并对电阻应变片的灵敏系数K进行归一化,就能使输出的电压大小和实际应变大小相对应,进而测试机床在静态加载时各测点的应变值。
应变仪的放大器对电桥的输出信号进行放大以便记录器记录变化的数据。
其中应变片采用单向应变片,电桥采用1/4桥路(公共补偿片)的桥路形式。
所述灵敏系数 K 为电阻应变片的电阻变化率与试件的最大主应变之比。
2.2动态应力测试在动态应力测试中,机身的变形带动电阻应变片形状的变化,进而引起电阻变化,用灵敏的惠斯顿电桥测出电阻值的变化,由足够高增益的 KD6005 应变放大器对电阻变化值放大,并由AZ308数据采集系统采集其放大的信号,最后由CRAS V7.0 振动及动态信号采集分析系统显示在 PC 机并进行处理分析,根据读取结果和动应力标定值计算出动应力值。
数控车床的组成及工作原理1.数控车床的组成虽然数控车床种类较多,但一般均由车床主体、数控装置和伺服系统三大部分组成。
图12-3是数控车床的基本组成方框图。
图12-3 数控车床的基本组成方框图(1)车床主体除了基本保持普通车床传统布局形式的部分经济型数控车床外,目前大部分数控车床均已通过专门设计并定型生产。
1)主轴与主轴箱a)主轴数控车床主轴的回转精度,直接影响到零件的加工精度;其功率大小、回转速度影响到加工的效率;其同步运行、自动变速及定向准停等要求,影响到车床的自动化程度。
b)主轴箱具有有级自动调速功能的数控车床,其主轴箱内的传动机构已经大大简化;具有无级自动调速(包括定向准停)的数控车床,起机械传动变速和变向作用的机构已经不复存在了,其主轴箱也成了"轴承座"及"润滑箱"的代名词;对于改造式(具有手动操作和自动控制加工双重功能)数控车床,则基本上保留其原有的主轴箱。
2)导轨数控车床的导轨是保证进给运动准确性的重要部件。
它在很大程度上影响车床的刚度、精度及低速进给时的平稳性,是影响零件加工质量的重要因素之一。
除部分数控车床仍沿用传统的滑动导轨(金属型)外,定型生产的数控车床已较多地采用贴塑导轨。
这种新型滑动导轨的摩擦系数小,其耐磨性、耐腐蚀性及吸震性好,润滑条件也比较优越。
3)机械传动机构除了部分主轴箱内的齿轮传动等机构外,数控车床已在原普通车床传动链的基础上,作了大幅度的简化。
如取消了挂轮箱、进给箱、溜板箱及其绝大部分传动机构,而仅保留了纵、横进给的螺旋传动机构,并在驱动电动机至丝杠间增设了(少数车床未增设)可消除其侧隙的齿轮副。
a)螺旋传动机构数控车床中的螺旋副,是将驱动电动机所输出的旋转运动转换成刀架在纵、横方向上直线运动的运动副。
构成螺旋传动机构的部件,一般为滚珠丝杠副,如图12-4所示。
如图12-4 滚珠丝杠副1一螺母 2一丝杠 3一滚珠 4一滚珠循环装置滚珠丝杠副的摩擦阻力小,可消除轴向间隙及预紧,故传动效率及精度高,运动稳定,动作灵敏。