步进电机选型手册
- 格式:docx
- 大小:12.13 KB
- 文档页数:2
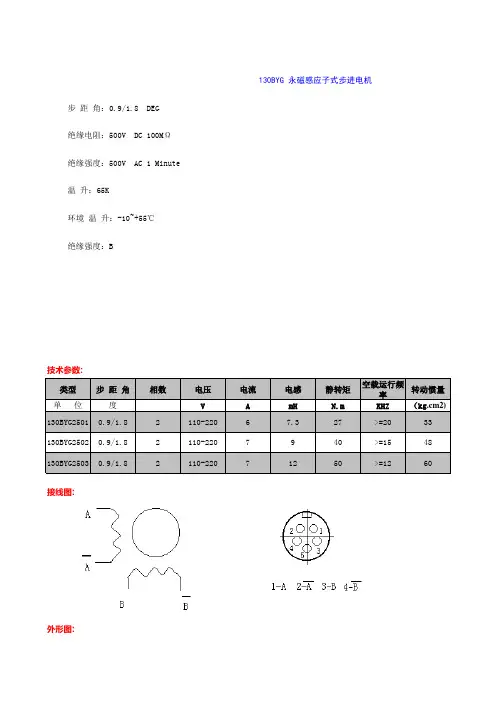
类型步 距 角相数电压电流电感静转矩空载运行频率转动惯量单 位度V A mH N.m KHZ (kg .cm2)130BYG25010.9/1.82110-22067.327>=2033130BYG25020.9/1.82110-2207940>=1548130BYG25030.9/1.82110-22071250>=1260技术参数:接线图:外形图:130BYG 永磁感应子式步进电机步 距 角:0.9/1.8 DEG绝缘电阻:500V DC 100M Ω绝缘强度:500V AC 1 Minute绝缘强度:B温 升:65K环境 温 升:-10~+55℃矩频特性:130BYG2501输出功率可达900W130BYG2502输出功率可达1500W 噪频特性:环境噪音:50dB温频特性:测试条件:SH20822M、 220AC 、7A、 2细分测试距离:1米测试条件:SH20822M、220VAC、7A、2细分,电感:8.7mH环境 温 升:28摄氏度130BYG 三相永磁感应子式步进电机型 号步距角相数电压电流静转矩空载运行频率转动惯量出轴单 位度V A N.m KHZ(kg.cm2)130BYG35010.63110-220625>=1818图1 130BYG35020.63110-220635>=1830图1 130BYG35030.63110-220650>=1848图2技术参数;接线图;外形图:矩频特性:130BYG3501输出功率可达600W 130BYG3502输出功率可达900W出轴>机身长(mm)图1177图1230图2270步 距 角:0.6/1.2 DEG绝缘电阻:500V DC 100MΩ绝缘强度:500V AC 1 Minute温 升:65K环境温度:-10~+55℃绝缘等级:B机身长(mm) 177 230 282达600W 达900W。


◆步进电机详细信息Array
◆步进电机性能参数
注:1. 以上仅为代表性产品,如需其它非代表性产品可以根据客户需求定制。
2。
根据客户不同需求可以定制4线,6线,8线步进电机
3。
两相步进电机基本步距角是1。
8°,三相步进电机步距角是1。
2°。
◆步进电机安装尺寸(单位:mm)
42 FH系列步进电机标准出轴为光轴,直径5mm,伸出轴长度21mm。
可按用户要求铣单扁、做双出轴、变更出轴长度;也可按用户要求定制电气参数,例如电流大小;或根据用户使用环境做参数调整,例如供电电压12V要求低速平稳;还可按用户提供样品仿制步进电机。
◆步进电机曲线图说明
◆步进电机接线图说明
注意:
◆电机特性数据和技术数据都是在匹配我公司驱动器驱动YBM86的情况下测得,测试电压为DC28V。
◆步进电机力矩测试数据与驱动器型号、参数设置、驱动器供电电压密切相关;同规格步进电机因定转子间隙不同,饶线方式不同,其矩频特性也不同。
◆电机安装前务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度,不同心会导致断轴。
◆电机与负载连接时,严禁敲击,电机轴与轴承受敲击后可能影响电机性能,甚至损坏。
◆电机与驱动器连接时,请勿接错相,错相或缺相时电机不能正常运转,可能损伤步进电机驱动器。
◆无电机接线图时,用万用表测量,电机线两两相通,分别接A+A—、B+B-。
无万用表时,挑两根电机线短接,若电机轴旋转阻力增大,则这两根线是一组线圈。
电机旋转初始方向与所需方向相反时,把A+A-两线换位即可。
步进电机选型册----a0432062-7160-11ec-86c2-7cb59b590d7d上海康森爱特csat步进电机、步进电机驱动器说明书1.1.8°20mm系列高转矩混合式步进电机-------------------22.1.8°28mm系列高转矩混合式步进电机-------------------33.1.8°35mm系列高转矩混合式步进电机-------------------44.1.8°39mm系列高转矩混合式步进电机-------------------55.1.8°42mm系列高转矩混合式步进电机步进电机-------------------66.1.8°57mm系列高转矩混合式步进电机-------------------77.1.8°57mm系列混合式步进电机-------------------88.1.8°60mm系列高转矩混合式步进电机-------------------99.1.8°86mm系列圆形高转矩混合式步进电机-----------------1010.1.8°86mm系列圆形标准混合式步进电机-------------------1111.1.8°86mm系列高转矩混合式步进电机-------------------1212.1.8°110mm系列高转矩混合式步进电机-------------------1313.57mm系列三相混合式步进电机-------------------1414.86mm系列三相混合式步进电机-------------------1515.110mm系列三相混合式步进电机-------------------1619。
Fl57sthjb系列带变速箱混合式步进电机------------------------------------------1720 Fl86sthjb系列带变速箱混合式步进电机-----------------18�电机常规参数Mm系列高转矩混合式步进电机参数:2022mm�尺寸:接线图:电机的一般参数mm系列大力矩混合式步进电机参数�2828mm尺寸:接线图:�电机常规参数Mm系列高转矩混合式步进电机参数:±35mm�尺寸:接线图:电机的一般参数�39mm系列大力矩混合式步进电机参数尺寸:接线图:�电机常规参数Mm系列高转矩混合式步进电机参数:±42mm电机的一般参数�57mm系列大力矩混合式步进电机参数尺寸:接线图:�电机常规参数57mm系列混合式步进电机的参数�尺寸:接线图:电机的一般参数60mm系列混合式步进电机参数60mm尺寸:接线图:�电机常规参数Mm系列圆形高转矩混合式步进电机参数:86mm �电机常规参数Mm系列圆形标准混合式步进电机参数:±86mm �尺寸:接线图:电机的一般参数�86mm系列大力矩混合式步进电机参数86mm电机的一般参数mm系列大力矩混合式步进电机参数�110110mm 尺寸:接线图:�电机常规参数Mm系列三相混合式步进电机参数:±57mm �尺寸:接线图:电机的一般参数mm系列三相混合式步进电机参数�8686mm�电机常规参数110mm系列三相混合式步进电机参数�尺寸:接线图:电机的一般参数�齿轮箱参数表减速比减速段长度(L)mm峰值扭矩kg Cm空载平均回程和间隙 12.5232五百零四万四千二百五十�电机常规参数减速比减速段长度(L)mm峰值扭矩kg Cm空载平均回程和间隙 12.5245。
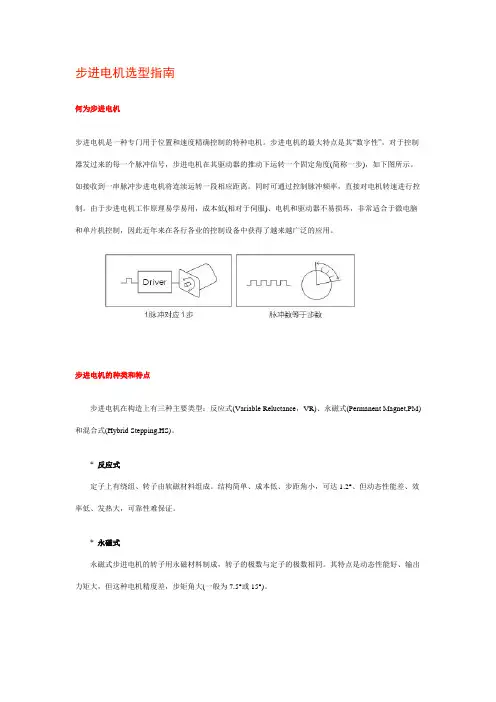
步进电机选型指南何为步进电机步进电机是一种专门用于位置和速度精确控制的特种电机。
步进电机的最大特点是其“数字性”,对于控制器发过来的每一个脉冲信号,步进电机在其驱动器的推动下运转一个固定角度(简称一步),如下图所示。
如接收到一串脉冲步进电机将连续运转一段相应距离。
同时可通过控制脉冲频率,直接对电机转速进行控制。
由于步进电机工作原理易学易用,成本低(相对于伺服)、电机和驱动器不易损坏,非常适合于微电脑和单片机控制,因此近年来在各行各业的控制设备中获得了越来越广泛的应用。
步进电机的种类和特点步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
* 反应式定子上有绕组、转子由软磁材料组成。
结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。
* 永磁式永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。
其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。
* 混合式混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。
其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。
按定子上绕组来分,共有二相、三相和五相等系列。
最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。
该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。
由于摩擦力和制造精度等原因,实际控制精度略低。
同一步进电机可配不同细分的驱动器以改变精度和效果。
雷赛步进电机系列雷赛两相、三相混合式步进电机,采用优质冷轧钢片和耐高温永磁体制造,产品规格涵盖35-130范围。
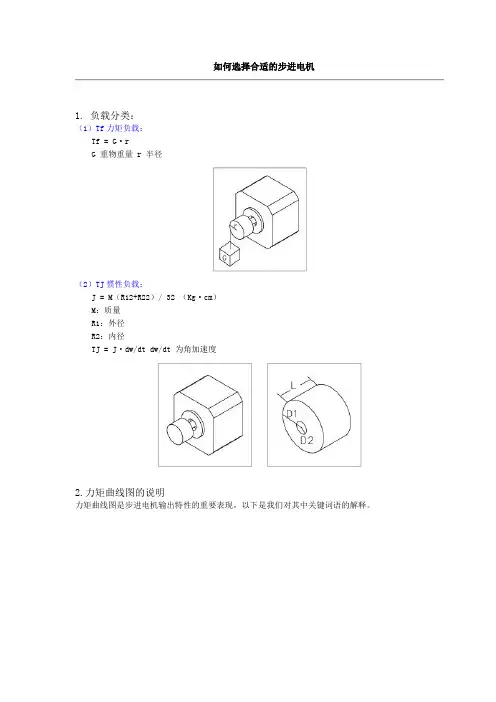
如何选择合适的步进电机1. 负载分类:(1)Tf力矩负载:Tf = G·rG 重物重量 r 半径(2)TJ惯性负载:J = M(R12+R22)/ 32 (Kg·cm)M:质量R1:外径R2:内径TJ = J·dw/dt dw/dt 为角加速度2.力矩曲线图的说明力矩曲线图是步进电机输出特性的重要表现,以下是我们对其中关键词语的解释。
说明:1. 工作频率点:表示步进电机在该点的转速值。
单位:Hzn=Θ*Hz / (360*D)n 转/秒Hz 该点的频率值D 电路的细分值,Θ步进电机的步距角例:1.8步进电机,在1/2细分驱动的情况下(即每步0.9)500Hz 时,其速度是 1.25转/秒2. 起动区域:步进电机可以直接起动或停止的区域。
3. 运行区域:在这个区域里,电机不能直接运行,必须先要在起动区域内起动,然后通过加速的方式,才能到达该工作区域内。
同样,在该区域内,电机也不能直接制动,否则就会造成失步,必须通过减速的方式到起动区域内,在进行制动。
4. 最大起动频率点:步进电机在空载情况下,最大的直接起动速度点。
5. 最大运行频率点:步进电机在空载情况下,可以达到的最大的运行速度点。
6. 起动力矩:步进电机在特定的工作频率点下,直接起动可带动的最大力矩负载值。
7. 运行力矩:步进电机在特定的工作频率点下,运行中可带动的最大力矩负载值。
由于运动惯性的原因,所以,运行力矩要比起动力矩大。
3 加速和减速运动的控制当一个系统的工作频率点在力矩曲线图的运行区域内时,如何在最短的时间内加速,减速就成了关键。
如下图示,步进电机的动态力矩特性一般在低速时为水平直线状,在高速时,由于电感的影响,很快下滑。
(1)直线加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ,一般TJ =70% Tm。
B.tr = 1.8*10-5*J*Θ*(F1-F0)/ (TJ-TL)C.F(t)=(F1-F0)*t/tr+F0, 0 < t < tr(2)指数加速运动已知电机负载为TL,要从F0 在最短时间tr内加速到F1,求tr 和加速脉频率F(t)A.确定TJ0,TJ1一般TJ0 =70% Tm0,TJ1 =70% Tm1,TL=60%Tm1B.tr = F4*ln[(TJ0-TL)/(TJ1-TL)]C.F(t)=F2*[1-e^(-t/F4)]+F0, 0 < t < tr其中,F2=(TL-TJ0)*(F1-F0)/(TJ1-TJ0)F4=1.8*10-5*J*Θ*F2 /( TJ0-TL)J 为电机转子和负载的转动惯量,Θ为每一步的度数,整步运行时为电机步距角。

常用两相四线(1.8°)电机快速选型表:电机命名规则UI24XX—L—XX04(06)A(B)���○4○5○6○71.UIROBOT优爱宝步进马达2.两相四线马达3.马达的端面尺寸型号如:20/28/35/42/57/86/1104.马达长度如:39/47/565.相电流XX代表相电流为X.X A/相6.04代表引线数为4,06代表引线数为67.输出轴型式A:单出轴B:双出轴技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameter技术规格Technique Specificatio机械尺寸Dimensions绕线图Wiring Diagram技术参数Technique parameterSpecificatio技术规格Technique机械尺寸Dimensions。
一体化步进电机选型手册INTEGRATED STEPPER MOTOR SELECTION MANUAL54321IM :开环(IS :闭环、IV :伺服)C :CAN open (通讯⽅式,省缺:脉冲/⽅向) :扭矩( : . N.m , : . N.m , : . N.m )1ZL I M242 3 C 40556- Zl :中菱科技:机座号(电机安装尺⼨代码,例如 代表 机座)⼀体化开/闭环步进电机命名规则Integrated Step-Servo Motor Part NumberZL:Shenzhen ZhongLing Technology Co., ltd.IM:Integrated Step-Servo Motor without Encoder, IS: IntegratedStep-Servo Motor with Encoder, IV: Integrated Servo Motor: Motor Size, mm(Nema ); : Motor Size, mm(Nema )C : CANOpen Control Method; Default : Pulse Control Method : Holding Torque ( : . N.m , : . N.m , : . N.m )⼀体化开/闭环步进电机系列Integrated Step-servo Motor Series⽰例Example01W . ° - - . - k - k - k - k/ . / ~ % RH - ~ ~ Hz/ . mm . ° . / . / ~ % RH - ~ ~ Hz/ . mm . ° - . . / ~ % RH - ~ ~ Hz/ . mm . °-./~% RH- ~~ Hz/ . mmZLIM -ZLIM -ZLIM -ZLIM -Integrated Step-Servo Motor Selection⼀体化开环步进电机选型实拍图photo-realistic型号Model步距⻆⼯作 (VDC)输出电流峰值(A)信号频率(Hz)控制信号输⼊电流(mA)过电压保护(VDC)输⼊信号电压(VDC)轴径(mm)轴⻓(mm)保持⼒矩(N.m) 编码器绝缘电阻(MΩ)使⽤环境温度(℃)环境湿度贮藏温度(℃)震动频率重量(g)Step Angle Input Voltage(VDC)Output Peak Current (A)Step Signal Frequency(Hz)Control Signal Input Current(mA)Over-Voltage Protection(VDC)Input Signal Voltage(VDC)Shaft Diameter(mm)shaft Length(mm)Holding Torque(N.m)EncoderInsulation Resistance(MΩ)Operating T emperature(℃)Ambient Humidity Storage Temperature(℃)Vibration Weight(g) - - - - 02. ° . - k - k - k - k/ . / ~ % RH - ~ ~ Hz/ . mm . ° . / . / ~ % RH - ~ ~ Hz/ . mm . ° - . . / ~ % RH - ~ ~ Hz/ . mm . °-./~% RH- ~~ Hz/ . mmZLIM C- ZLIM C- ZLIM C- ZLIM C-实拍图photo-realistic型号Model步距⻆输出电流峰值(A)信号频率(Hz)控制信号输⼊电流(mA)过电压保护(VDC)输⼊信号电压(VDC)轴径(mm)轴⻓(mm)保持⼒矩(N.m) 编码器绝缘电阻(MΩ)使⽤环境温度(℃)环境湿度贮藏温度(℃)震动频率重量(g)Step Angle Output Peak Current (A)Step Signal Frequency(Hz)Control Signal Input Current(mA)Over-Voltage Protection(VDC)Input Signal Voltage(VDC)Shaft Diameter(mm)shaft Length(mm)Holding Torque(N.m)EncoderInsulation Resistance(MΩ)Operating T emperature(℃)Ambient Humidity Storage Temperature(℃)Vibration Weight(g)⼯作 (VDC)Input Voltage(VDC) - - - -- - 03W ZLIS -ZLIS -ZLIS -ZLIS -. ° . - - - -/ . 线 -Lines线 -Lines线 -Lines线 -Lines~ % RH - ~ ~ Hz/ . mm . ° . / .~ % RH - ~ ~ Hz/ . mm . ° - .~ % RH - ~ ~ Hz/ . mm . °-.~% RH- ~~ Hz/ . mmIntegrated Closed-Loop Step-Servo Motor Selection⼀体化闭环步进电机选型实拍图photo-realistic型号Model步距⻆输出电流峰值(A)信号频率(Hz)控制信号输⼊电流(mA)过电压保护(VDC)输⼊信号电压(VDC)轴径(mm)轴⻓(mm)保持⼒矩(N.m) 编码器绝缘电阻(MΩ)使⽤环境温度(℃)环境湿度贮藏温度(℃)震动频率重量(g)Step Angle Output Peak Current (A)Step Signal Frequency(Hz)Control Signal Input Current(mA)Over-Voltage Protection(VDC)Input Signal Voltage(VDC)Shaft Diameter(mm)shaft Length(mm)Holding Torque(N.m)EncoderInsulation Resistance(MΩ)Operating T emperature(℃)Ambient Humidity Storage Temperature(℃)Vibration Weight(g)⼯作 (VDC)Input Voltage(VDC) - - - k - k - k - k 04ZLIS C- ZLIS C- ZLIS C- ZLIS C-. ° - - - -/ . 线 -Lines线 -Lines线 -Lines线 -Lines~ % RH - ~ ~ Hz/ . mm . ° / .~ % RH - ~ ~ Hz/ . mm . ° - .~ % RH - ~ ~ Hz/ . mm . °-.~% RH- ~~ Hz/ . mm. . 实拍图photo-realistic型号Model步距⻆输出电流峰值(A)信号频率(Hz)控制信号输⼊电流(mA)过电压保护(VDC)输⼊信号电压(VDC)轴径(mm)轴⻓(mm)保持⼒矩(N.m) 编码器绝缘电阻(MΩ)使⽤环境温度(℃)环境湿度贮藏温度(℃)震动频率重量(g)Step Angle Output Peak Current (A)Step Signal Frequency(Hz)Control Signal Input Current(mA)Over-Voltage Protection(VDC)Input Signal Voltage(VDC)Shaft Diameter(mm)shaft Length(mm)Holding Torque(N.m)EncoderInsulation Resistance(MΩ)Operating T emperature(℃)Ambient Humidity Storage Temperature(℃)Vibration Weight(g)⼯作 (VDC)Input Voltage(VDC) - - - k - k - k - k05 。
步进电机选型手册1、步进电机怎么选型,如何选择步进电机。
大家知道吗,步进电机转矩的选择步进电机的保持转矩,近似于传统电机所称的“功率”。
当然,有着本质的区别。
步进电机怎么选型,步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。
如何选择步进电机。
通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的电机。
大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m 左右的,选择57电机较为合适。
扭力在几个N.m或更大的情况下,就要选择86、110、130等规格的步进电机。
2、如何选择步进电机,在选型过程中步过电机转速的选择对于电机的转速也要特别考虑。
因为,电机的输出转矩,与转速成反比。
就是说,步进电机在低速(每分钟几百转或更低转速,其输出转矩较大),在高速旋转状态的转矩(1000转/分--9000转)就很小了。
当然,有些工况环境需要高速电机,就要对步进电动机的线圈电阻、电感等指标进行衡量。
如何选择步进电机,选择电感稍小一些的电机,作为高速电机,能够获得较大输出转矩。
反之,要求低速大力矩的情况下,就要选择电感在十几或几十mH,电阻也要大一些为好。
3、步进电机怎么选型,步进电机空载起动频率的选择步进电机空载起动频率,通常称为“空起频率”。
这是选购电机比较重要的一项指标。
如果要求在瞬间频繁启动、停止,并且,转速在1000转/分钟左右(或更高),通常需要“加速启动”。
步进电机怎么选型,如果需要直接启动达到高速运转,最好选择反应式或永磁电机。
这些电机的“空起频率”都比较高。
4、步进电机怎么选型,步进电机的相数选择步进电机的相数选择,这项内容,很多客户几乎没有什么重视,大多是随便购买。
其实,不同相数的电机,工作效果是不同的。
步进电机怎么选型,相数越多,步距角就能够做的比较小,工作时的振动就相对小一些。
大多数场合,使用两相电机比较多。
相电流电阻电感保持转矩步距角空起频率运行频率转动惯量重量励磁方式型号A ΩmH N.m Deg KHz KHz Kg.cm^2 Kg110BC380 5 0.37 12.5 5.5 0.75/1.5 1.5 15 4.1 6 三相六拍110BC380A 6 0.44 13.5 8 0.75/1.5 1.4 15 5 8.5 三相六拍110BC380C 6 0.56 15 10 0.75/1.5 1.4 15 6.5 11 三相六拍外形尺寸型号 D B d1 L1 b D1 h h1 L D2 S 110BC380 110 112 14 30 4 85 4 10 154 132 9 110BC380A 110 112 14 30 4 85 4 10 184 132 9 110BC380C 110 112 14 30 4 85 4 10 204 132 9接线方式电机采用航接插件方式,接法如下:1,2-----A,A'3,4-----B,B'5,6-----C,C'7 -----接地(外壳)相电流电阻电感保持转矩步距角空起频率运行频率转动惯量重量励磁方式型号A ΩmH N.m Deg KHz KHz Kg.cm^2 Kg130BC3100 8 0.28 11 12 0.6/1.2 1.5 15 10.5 10 三相六拍130BC3100A 10 0.3 16.5 22 0.6/1.2 1.25 15 18.2 18 三相六拍130BC3100B 10 0.26 13 18 0.6/1.2 1.3 15 15 16 三相六拍外形尺寸型号 D B d1 L1 b D1 h h1 L D2 S M 130BC3100 132 134 22锥1:10 55 6 100 5 12 168 155 11 M12*1.25 130BC3100A 132 134 22锥1:10 55 6 100 5 12 235 155 11 M12*1.25 130BC3100B 132 134 22锥1:10 55 6 100 5 12 209 155 11 M12*1.25接线方式电机采用航接插件方式,接法如下:1,2-----A,A'3,4-----B,B'5,6-----C,C'7 -----接地(外壳)110BYG系列电机外形尺寸110BYG250/110BYG350/110BYG550110BYG260110BYG5200型号L110BYG250 121110BYG250A 175110BYG250B 220110BYG250C 250110BYG260A 143110BYG260B 175110BYG350 121110BYG350A 175110BYG350B 220110BYG350C 250110BYG550 121110BYG550A 175110BYG550B 220110BYG550C 250110BYG5200B 145110BYG5200C 176110BYG5200D 207接线方式三相四相(两相)五相130BYG系列电机外形尺寸130BYG250/130BYG350/130BYG550130BYG3100型号L 130BYG250 197 130BYG250A 225 130BYG250B 280 130BYG350 197 130BYG350A 225 130BYG350B 280130BYG550A 225130BYG550B 280130BYG3100A 172130BYG3100B 203130BYG3100C 260接线方式二相三相五相型号接地 A A' B B' C C' D D' E E' 备注130BYG250 5 1 2 3 4 五芯插座130BYG350 1 3 5 七芯插座,△接法130BYG550 1 2 3 4 5 6 7 8 9 10 十芯插座130BYG3100 7 1 2 3 4 5 6相反应式步进电机产品规格及性能外形及安装尺寸三相反应式减速步进电机规格及性能。
步进电机选型指南/步进电机驱动器/步进电机控制器一、步进电机选用指南:1、怎么确定步进电机的型号,要注意那几个主要参数?混合式步进电机中的静力矩,引线数,电感等参数如何理解?一般是根据您的负载选电机,主要是参考步进电机的力矩,详细的还涉及到电机的转速和额定电流,传动机构等,起动的转速和正常运行的转速,另外还有电机的精度。
2、步进电机选型注意事项a、步进电机应用于低速场合-----每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
b、步进电机最好不使用整步状态,整步状态时振动大。
c、除了标称为12V电压的电机使用12V外,其他电机可根据驱动器选择驱动电压(建议:57BYG采用直流24V-36V,86BYG采用直流46V,110BYG采用高于直流80V)。
当然,12伏电压的电机也可以采用其他驱动电源,不过要考虑温升。
d、转动惯量大的负载应选择机座号较大的电机。
e、工作转速较高的电机在带动大惯量负载时,一般不要在工作转速下起动,而应该采用逐渐升频提速,这样一来电机不会失步,二来可以减少噪音,还可以提高停转时的定位精度。
f、精度要求高时,应通过采用机械减速、提高电机速度以及选用高细分数的驱动器来解决。
电机不应在振动区内工作,如若必须可通过改变电压、电流或增加阻尼的方法解决。
g、电机工作在600PPS(0.9度)以下,应选择小电流、大电感、低电压的驱动器。
h、应遵循先选电机后选驱动器的原则。
3、步进电机原理步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速和停止位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性误差而无累积误差的特点,使得其控制速度和位置非常简单。
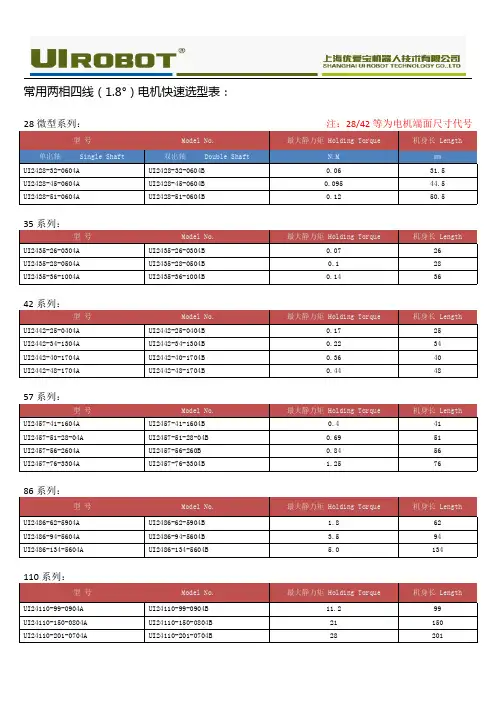
常用两相四线(1.8°)电机快速选型表:28微型系列:注:28/42为电机端面尺寸代号型号型号最大静扭矩保持力矩体长度单轴单轴双轴双轴。
型号:0628-0428-045-0428-045-0428-045-0428-045-0428-045-0428-0451-0428-045-0428-0451-04 28-045-0428-045-0428-045-0428-045-0428-045-0428-045-0428-045-0428-0451-0428-045-0 428-045-0428-0451-045-0428-0451-0428-045-0451。
最大静态扭矩保持扭矩体长度2435-26-0304AUI2435-26-0304B0.0726UI2435-28-0504AUI2435-28-0504B0.128UI2435-36-1 004AUI2435-36-1004B0.143642系列:型号。
最大静力矩保持扭矩体长度2442-25-0404AUI2442-25-04040B0。
1725UI2442-34-1304AUI2442-34-1304B0.2234UI2442-40-1704AUI2442-40-1704B0.3640UI2 442-48-1704AUI2442-48-1704B0.444857系列:型号号。
最大静力矩保持力矩体长度长度2457-41-1604AUI2457-41-1604B0.441UI2457-51-28-04AUI2457-51-28-04B0.6951UI2457-56-2604AUI2457-56-260B0.8456UI2457-76-3304AUI2457-76-3304B1.257686系列:型号:最大静力矩保持扭矩体长度LengthUI2486-62-5904AUI2486-62-5904B1.862UI2486-94-5604AUI2486-94-5604B3.594UI24 86-134-5604AUI2486-134-5604B5.0134110系列:型号编号。
D 系列步进驱动器11\12\13\14\15\16 X 系列步进驱动器
17\18\19
闭环步进系统20\21\22\23\24\25 PM步进电机、同步电机
26
E 闭环电机
E 驱动闭环步进
PS.当控制信号为24V时,此型号需要在PU和DR两端分别一个1-1.5KΩ限流电阻电阻
PS.当控制信号为24V时,此型号需要在PU和DR两端分别一个1-1.5KΩ限流电阻电阻
20
步 距 角
绝缘电阻
绝缘强度
环境温度
温 升
绝缘等级0.9o /1.8o 500V DC 100MΩ Min 500V AC 50Hz 1mA Minute -10~50℃80℃ Max F
21
电机特性
尺寸图
步 距 角
绝缘电阻
绝缘强度
环境温度
温 升
绝缘等级
0.9o/1.8o
500V DC 100MΩ Min
500V AC 50Hz 1mA Minute
-10~50℃
80℃ Max
F
22
23
尺寸
功能说明
24特性
端口定义、引线颜色说明
25
16.3
139.6
27.3
73.2
97.5
5.2
52.7
尺寸
接口说明图
具体产品选型请咨询工程师并出图
26。
步进电机:
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。
每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
步进电动机:
步进电动机把电脉冲信号变换成角位移以控制转子转动的微特电机。
在自动控制装置中作为执行元件。
每输入一个脉冲信号,步进电动机前进一步,故又称脉冲电动机。
测速方法:
步进电动机是将脉冲信号转换为角位移或线位移。
一是过载性好。
其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,步进电机使用时对速度和位置都有严格要求。
二是控制方便。
步进电机是以“步”为单位旋转的,数字特征比较明显。
三是整机结构简单。
传统的机械速度和位置控制结构比较复杂,调整困难,使用步进电动机后,使得整机的结构变得简单和紧凑。
测速电机是将转速转换成电压,并传递到输入端作为反馈信号。
测速电机为一种辅助型电机,在普通直流电机的尾端安装测速电机,通过测速电机所产生的电压反馈给直流电源,来达到控制直流电机转速的目的。
应用:
主要用于数字控制系统中,精度高,运行可靠。
如采用位置检测和速度反馈,亦可实现闭环控制。
步进电动机已广泛地应用于数字控制系统中,如数模转换装置、数控机床、计算机外围设备、自动记录仪、钟表等之中,另外在工业自动化生产线、印刷设备等中亦有应用。