二自由度控制方法研究综述
- 格式:doc
- 大小:74.50 KB
- 文档页数:6
关于主体和主体性问题研究综述模块一:研究概况主体性问题自80年代初起,首先在我国哲学界凸起,然后迅速地渗入各相关的学科领域。
仅从哲学界来说,它最初作为一个综合性的问题为人们所关注,继而又向两个领域深入具体地分化、发展。
一个是认识论领域,一个是社会历史观领域。
随着研究的进展,主体性问题在理论上的重要性和现实中的意义已逐渐引起人们的普遍重视。
然而,由于问题本身的复杂性,以及在不同的主客体关系中其自身的差异性,使得主体性问题又成为目前理论界争议较多的一个问题。
总体来说,关于主体性问题的讨论主要涉及到这样一些问题:一是关于主体性和主体性原则。
对于这一问题,学者们主要从两个方面进行了激烈的争论,一方面是主体性的概念,其中,主体的自由度和交互主体的研究是对主体概念理解的进一步深化;另一方面是主体性原则,首先在这个原则能否成立的问题上有争论,其次在同意主体性原则成立的学者中对主体性原则的理解也不尽相同。
二是关于物质观中的主体性问题。
关于物质观中的主体性问题的研究主要涉及到这样一些方面:其一,主体性的物质前提。
在这一问题上,一些学者与坚持主体性哲学的学者发生了激烈的争论。
这些学者认为,主体性哲学的一个重要特点,就是以“拒斥形而上学”、“反对本体论化”为名,否定主体性的物质前提,否定马克思主义哲学关于世界的物质统一性原理。
其二,主体性和受动性。
这里事实上如何正确认识能动性与受动性的关系的问题。
三是认识论中的主体性问题。
学者们从不同的角度对这一问题进行了论述,从而大大加深了对认识活动的主体性问题的理解。
四是社会历史观中的主体性问题。
社会历史观领域中的主体性问题比认识论领域更为复杂,围绕着社会历史观领域中的主体性问题,学者们主要探讨了选择论与决定论,合目的性与合规律性的问题。
这其中,选择论与合目的性强调社会发展进程中的主体性因素,而决定论与合规律性则强调社会发展进程中的客观性因素。
模块二:论点摘要一、关于主体性和主体性原则关于主体和主体性原则问题的研究主要涉及到这样一些方面:其一是主体性的概念,其中,主体的自由度和交互主体的研究是对主体概念理解的进一步深化;其二是主体性原则,首先在这个原则能否成立的问题上有争论,其次在同意主体性原则成立的学者中对主体性原则的理解也不尽相同。
浙江理工大学本科毕业设计(论文)文献综述报告随着机器人应用领域日益扩大,自动化水平不断提高,特别是在水下、高空及危险的作业环境中, 迫切希望能给机器人末端赋予一个类似人手的通用夹持器,以便在危险、复杂及非结构化的环境中,适应抓取任意形状的物体,完成各种复杂细微操作任务的要求,机器人多指灵巧手正是为了适应这一需要而提出的[1] 。
2 国外多指手发展历史及研究成果目前,国内和国外都有一些非常有代表性的多指灵巧手被制造出来。
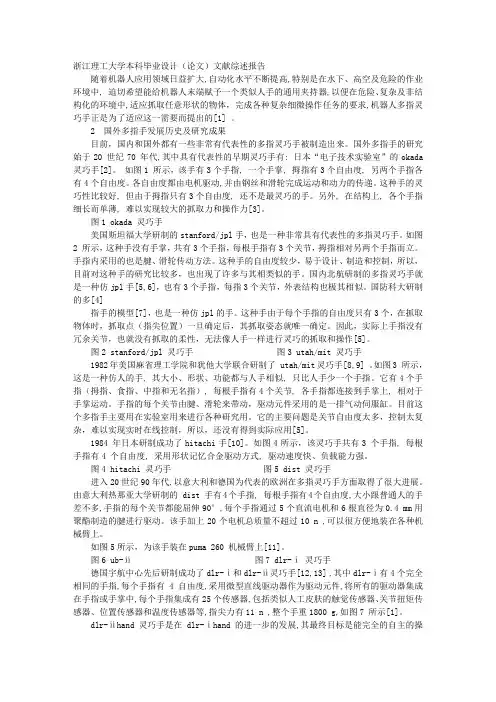
国外多指手的研究始于20 世纪70 年代,其中具有代表性的早期灵巧手有: 日本“电子技术实验室”的okada灵巧手[2]。
如图1 所示,该手有3个手指, 一个手掌, 拇指有3个自由度, 另两个手指各有4个自由度。
各自由度都由电机驱动,并由钢丝和滑轮完成运动和动力的传递。
这种手的灵巧性比较好, 但由于拇指只有3个自由度, 还不是最灵巧的手。
另外, 在结构上, 各个手指细长而单薄, 难以实现较大的抓取力和操作力[3]。
图1 okada 灵巧手美国斯坦福大学研制的stanford/jpl手,也是一种非常具有代表性的多指灵巧手。
如图2 所示,这种手没有手掌,共有3个手指,每根手指有3个关节,拇指相对另两个手指而立。
手指内采用的也是腱、滑轮传动方法。
这种手的自由度较少,易于设计、制造和控制,所以,目前对这种手的研究比较多,也出现了许多与其相类似的手。
国内北航研制的多指灵巧手就是一种仿jpl手[5,6],也有3个手指,每指3个关节,外表结构也极其相似。
国防科大研制的多[4] 指手的模型[7],也是一种仿jpl的手。
这种手由于每个手指的自由度只有3个,在抓取物体时,抓取点(指尖位置)一旦确定后,其抓取姿态就唯一确定。
因此,实际上手指没有冗余关节,也就没有抓取的柔性,无法像人手一样进行灵巧的抓取和操作[5]。
图2 stanford/jpl 灵巧手图3 utah/mit 灵巧手1982年美国麻省理工学院和犹他大学联合研制了 utah/mit灵巧手[8,9] 。
毕业设计开题报告格式(通用4篇)篇一:设计类毕业设计开题报告篇一一、拟选定学位论文的题目名称沥青搅拌楼的楼架结构分析二、选题的科学意义和应用前景选题的科学意义:大型机器的支撑基础,承受着由机器的不平衡扰力引起的振动和机器的自重等,如其振动过大,将会影响机器的加工要求或无法正常运转,甚至损坏机器和影响邻近的设备、仪器和人员的工作和生活,严重的还会危及建筑物的安全。
因此动力机器的基础结构分析具有重要的意义。
我国对于动力机器基础正式研究起于上世纪七十年代,在八十年代主要编制成了国家标准《动力机器基础设计规范》和《设计手册》,这对于动力机器基础设计和分析提供了重要依据和参考。
近年来对于动力机器基础结构的研究,往往集中于对压缩机、压力机、运输机、配料机等机器基础的设计和结构分析。
对于工业上应用的更复杂的设备,像由振动筛、搅拌器等多个动力机器组成的大型沥青搅拌楼,对于这种往往由多个动力机器组合的大型设备的楼架问题研究的几乎没有。
另一方面研究人员仅仅采用单一理论计算方法计算扰力值,振动幅值等,计算方法和参数的选择并不统一,或考虑不够全面造成结果各不相同或不接近实际。
针对以上问题,本文拟考虑多台设备共同作用时的振动合成,如考虑搅拌机的振动扰力和振动筛的扰力,并考虑如风载、静载、动载多种载荷情况下楼架的承载和振动情况。
同时在理论计算的基础上,采用有限元分析软件对楼架进行模态分析,获得结构的频率和振型,然后进行分析,根据分析结果优化楼架设计,并再次进行有限元计算,验证改进方案的可行性。
选题的应用前景:沥青混凝土搅拌设备是沥青路面机械化施工的关键设备,近20年来,我国公路交通事业发展迅猛,公路机械化施工因此获得巨大进步,特别是对参与高速公路沥青路面工程建设的企业来说,拥有大型沥青混凝土搅拌设备已是市场准入条件之一。
而其楼架部分是搅拌楼的重要承载机构,其设计首先必须保证机器的特定工作要求,满足振动和抗振的要求。
楼架作为沥青搅拌楼的支撑基础,它在各种工况下承受着巨大的载荷。
题目《中国电机工程学报》综述征稿启事3 个行波定子的2 自由度球形超声波电机30/20 极混合励磁双凸极电机开关磁阻发电方式研究ALA+SPM 组合转子同步电机设计探讨H 桥驱动下的单绕组无轴承薄片电机功率系统故障分析及容错控制并列式混合励磁磁通切换电机直流发电系统功率角线性控制策略并列式混合励磁磁通切换型电机及其电流矢量控制策略研究并网风电机组在线运行状态评估方法采用抗差扩展卡尔曼滤波器的感应电机转速估计方法采用扰动转矩观测器的低速电机伺服系统超临界600 MW 火电机组热力系统的火用分析超声电机LLCC 谐振电路研究船舶电力推进系统电机组三维模糊控制磁动势法五相永磁力矩电机转矩分析磁路互补型模块化磁通切换永磁直线电机磁悬浮开关磁阻电机的神经网络逆解耦控制磁悬浮开关磁阻电机径向位移自检测磁悬浮开关磁阻电机转子位移/位置观测器设计次级边缘漏感对高速直线感应电机性能的影响大电机定子线棒光纤光栅准分布式测温技术大功率开关磁阻电机EMI 噪声综合分析与处理大规模风电接入下风电机组切机措施研究大推力推挽纵振弯纵复合直线超声电机带交流励磁双变流器的双馈电机电磁干扰研究单边盘式感应电机的数学模型与转矩分析单绕组无轴承永磁薄片电机短路容错运行单绕组无轴承永磁薄片电机缺相运行特性分析灯泡贯流泵机组电机气隙不均对温升的影响电励磁双凸极电机转矩脉动分析与抑制电网短路时并网双馈风电机组的特性研究定子磁链提前换相增加直线永磁无刷直流电机的推力动态机组组合与等微增率法相结合的火电机组节能负荷分配方法多层次灰色关联分析法在火电机组运行评价中的应用多相感应电机场路耦合时步有限元分析多相感应电机的非正弦供电技术多相无轴承永磁薄片电机故障运行特性分析多相异步电机参数的计算与测量非对称波驱动的非接触式超声电机非正弦供电十五相感应电机定子漏抗计算分段供电直线感应电机气隙磁场分布和互感不对称分析分数槽永磁同步电机电磁振动的分析与抑制风电机组齿轮箱温度趋势状态监测及分析方法复合电流驱动永磁同步平面电机的设计方法改进双谱和经验模态分解在牵引电机轴承故障诊断中的应用感应电机全域三维瞬态温度场分析感应电机速度和电阻自适应辨识的LMI 方法高转矩永磁轮毂电机电感参数研究轨道车辆用永磁同步电机系统弱磁控制策略混合励磁磁通切换电机等效磁路模型混合励磁双凸极电机三维有限元仿真与数字电压调节技术火电机组直接空冷系统优化设计方法研究基于半桥变换器的电励磁双凸极电机角度优化控制策略基于参考输入学习的永磁同步电机高精度位置伺服系统基于磁编码器的伺服电机速度及位置观测器设计基于磁场定向的矩阵变换器驱动感应电机变结构直接转矩控制基于等效误差法的直线电机XY 平台二阶滑模控制基于电磁转矩反馈补偿的永磁同步电机新型IP 速度控制器基于电感线性区模型的开关磁阻电机无位置传感器技术基于电流误差矢量的绕组分段永磁直线同步电机电流预测控制基于定子磁链滑模观测器的异步电机空间矢量调制直接转矩控制基于非线性电感分析的永磁直线同步电机电磁推力特性研究基于负载转矩滑模观测的永磁同步电机滑模控制基于复矢量调节器的低开关频率同步电机控制基于改进电压模型的感应电机低速发电运行稳定性研究基于改进叶素动量理论的水平轴风电机组气动性能计算基于空间矢量调制的电励磁磁通切换电机转矩角增量控制策略基于空间矢量调制的异步电机直接转差线性控制基于扩张状态观测器的直驱阀用音圈电机控制系统基于模型参考自适应的感应电机励磁互感在线辨识新方法基于摩擦补偿的永磁球形电机自适应模糊控制基于内模的永磁同步电机滑模电流解耦控制基于逆模型的火电机组自适应解耦控制基于撬棒保护的双馈电机风电场低电压穿越动态特性分析基于死区迟滞函数的永磁同步直线电机滑模控制基于图论的火电机组热经济性定量分析方法基于无单元伽辽金法的电机电磁场计算基于新型扰动观测器的永磁同步电机滑模控制基于隐式梯形–时步保持法的3/12 相电机建模基于永磁同步电机的风力机动静态特性模拟基于预测算法和变结构的矩阵变换器驱动感应电机无差拍直接转矩控制基于载波频率成分法的内置式永磁同步电机无位置传感器控制基于正交坐标变换的永磁无刷直流电机转速估计方法基于状态观测器的感应电机速度传感器故障诊断及容错控制基于自举电路的开关磁阻电机初始位置估计方法基于自抗扰控制器的两电机变频调速系统最小二乘支持向量机逆控制基于自适应补偿的异步电机静止参数辨识方法基于自适应线性元件神经网络的表面式永磁同步电机参数在线辨识级联无刷双馈电机的磁场定向直接反馈控制极弧系数选择对永磁无刷直流电机激振力波的影响极相调制感应电机的建模与控制集成绕组结构短行程直流平面电机计及逆变器电压输出限制的感应电机无差拍直接转矩控制结构参数对高温超导直线感应电机电磁性能的影响矩阵变换器−永磁同步电机驱动系统静态稳定性分析开关磁阻电机中功率变换器故障在线诊断方法考虑饱和及转子磁场谐波的永磁同步电机模型考虑交叉饱和影响的永磁同步电机稳态参数有限元分析粒子群优化同步电机分数阶鲁棒励磁控制器两电机变频系统的支持向量机广义逆内模解耦控制洛伦兹平面电机解耦控制与参数校准内置式永磁同步电机无位置传感器控制啮合式磁阻电机参数化非线性模型的建立驱动电压跟踪的超声波电机频率自适应技术全局滑模控制在永磁同步电机位置伺服中的应用三次谐波注入式五相永磁同步电机转矩密度优化实现感应电机宽范围最大转矩控制的电流优化策略双Y 移30° 永磁同步电机的空间矢量调制双定子电励磁双凸极电机的起动控制双定子永磁无刷电机裂比的分析与优化双馈风电机组低电压穿越的无功电流分配及控制策略改进双馈风电机组对电力系统低频振荡特性的影响双馈风电机组关键传感器的故障诊断方法伺服比例阀用动圈式直线电机天窗电机噪声测试及特征频率提取方法卧板式直线超声电机的特性分析模型无传感器内置式永磁同步电机低速运行转子位置鲁棒观测器无刷双馈电机能量传递关系和功率因数特性的实验研究无刷直流电机的磁链自控直接转矩控制无刷直流电机反电势自适应滑模观测无刷直流电机无磁链观测直接转矩控制无轴承交替极电机控制系统改进及实现无轴承开关磁阻电机转子质量偏心补偿控制无轴承永磁薄片电机径向悬浮力精确数学建模斜槽电机中绕组电感参数的解析计算方法斜槽式纵扭模态转换型超声电机在不同摩擦副下的负载特性研究新型电励磁磁通切换电机励磁绕组结构分析新型混合励磁同步电机分区控制系统分析与设计新型冷却结构超高精度平面电机定子温度场分析新型切向/径向磁路并联混合励磁同步电机新型塔形直线超声电机行波型杆式超声电机模态频率调节行波型旋转超声电机速度稳定性研究行波型旋转超声电机温度场分析方法旋转型行波超声电机接触界面的空间域分析压电叠堆泵驱动的精密步进驱动电机一种参数化网格剖分方法及其在电机优化设计中的应用一种非共振式压电叠堆直线电机的机理与设计一种轮式直线型超声电机一种往复开关磁阻直线电机的设计与控制异步电机空载铁耗分布的时步有限元分析异步电机自适应全阶观测器算法低速稳定性研究抑制车用异步电机电磁噪声的槽配合永磁容错电机最优电流直接控制策略永磁同步电机电流预测控制算法永磁同步电机滑模变结构调速系统动态品质控制永磁同步电机模型补偿组合非线性反馈位置控制永磁同步电机弱磁失控机制及其应对策略研究永磁同步电机伺服系统抗扰动自适应控制永磁同步电机新型滑模观测器无传感器矢量控制调速系统永磁同步电机直接转矩控制转矩调节器设计永磁同步电机转矩预测控制的磁链控制算法永磁同步电机最优直接转矩控制永磁同步平面电机电流分配策略永磁型双机械端口电机的电磁耦合分析永磁直线电机二维分段复合迭代学习控制永磁直线同步电机定位力分析与实验研究永磁直线同步电机纵向端部效应补偿方法用谐波注入抑制永磁同步电机转矩脉动在线监测电机功率状态的图形识别方法直驱型机电作动器中永磁容错电机非线性模型研究周期脉冲式直线感应电机定子瞬态温度特性转子磁钢表贴式永磁同步电机转子初始位置检测转子磁钢离心式六相十极永磁容错电机及控制策略转子绕组星–环形拓扑结构无刷双馈电机自抗扰控制器在三电机同步系统中的应用自起动永磁同步电机起动过程退磁磁场的计算与分析单位第1作者名字第1作者职称彭丹硕士浙江大学电气工程学院胡锡辛博士研究生南京航空航天大学陈志辉副教授华中科技大学电气与电子工程学院陈学珍博士研究生南京航空航天大学自动化学院任新宇硕士研究生南京航空航天大学王宇博士研究生南京航空航天大学自动化学院朱婷婷工学硕士重庆大学李辉博士西安理工大学自动化学院尹忠刚博士浙江大学电气工程学院纪科辉博士研究生清华大学热科学与动力工程教育部重点实验室刘强博士研究生南京航空航天大学机械结构力学与控制国家重点实验俞浦硕士研究生哈尔滨工程大学自动化学院刘胜教授沈阳工业大学电气工程学院彭兵博士研究生东南大学电气工程学院曹瑞武博士研究生江苏大学电气信息工程学院孙玉坤教授江苏大学电气信息工程学院周云红博士研究生江苏大学电气信息工程学院朱志莹博士研究生海军工程大学电力电子技术研究所鲁军勇博士研究生王鹏博士研究生哈尔滨理工大学工程电介质及其应用教育部重点实验南京师范大学电气与自动化工程学院赵阳教授中国电力科学研究院丁剑博士哈尔滨工业大学机电工程学院石胜君博士海军工程大学潘启军博士北京交通大学电气工程学院朱熙朱熙南京航空航天大学自动化学院盛旺硕士研究生南京航空航天大学自动化学院岳盛奏硕士研究生扬州大学能源与动力工程学院申剑硕士研究生南京航空航天大学张乐博士研究生重庆大学欧阳金鑫博士研究生国防科技大学磁悬浮技术工程研究中心赵宏涛博士研究生大连理工大学水电与水信息研究所李树山博士研究生华北电力大学控制与计算机工程学院罗毅教授海军工程大学电气与信息工程学院乔鸣忠博士浙江大学电气工程学院刘东博士研究生南京航空航天大学自动化学院王晓琳副教授浙江科技学院自动化与电气工程学院康敏博士浙江师范大学工学院鄂世举博士海军工程大学王东博士海军工程大学许金博士研究生浙江大学电气工程学院杨浩东博士研究生华北电力大学控制与计算机工程学院郭鹏博士哈尔滨工业大学电气工程及自动化学院寇宝泉博士生导师北京交通大学机械与电子控制工程学院杨江天工学博士北京工业大学机械工程与应用电子学院邰永硕士研究生中南大学信息科学与工程学院年晓红中南大学教授哈尔滨工业大学电气工程及自动化学院宫海龙博士研究生中南大学信息科学与工程学院盛义发博士研究生南京航空航天大学自动化学院许泽刚博士研究生南京航空航天大学陈志辉副教授中国电力投资集团公司张晓鲁教授级高级工程南京航空航天大学航空电源航空科技重点实验室李国生硕士研究生西北工业大学自动化学院李兵强博士后北京航空航天大学仪器科学与光电工程学院吴忠博士生导师上海交通大学电子信息与电气工程学院王晶鑫博士研究生沈阳工业大学电气工程学院王丽梅博士生导师中国科学院电工研究所郭新华博士南京航空航天大学蔡骏博士研究生中山大学工学院洪俊杰博士西南交通大学电气工程学院廖永衡博士研究生清华大学精密仪器与机械学系刘成颖副教授哈尔滨工业大学电气工程及自动化学院张晓光博士研究生中国矿业大学信息与电气工程学院伍小杰博士生导师上海大学机电工程与自动化学院宋文祥博士后河海大学水利水电学院曾庆川博士南京航空航天大学王宇博士研究生南京航空航天大学王宇硕士研究生北京航空航天大学自动化科学与电气工程学院王大彧博士研究生大连理工大学徐占国讲师合肥工业大学电气与自动化工程学院过希文博士研究生中国科学院电工研究所周华伟江苏大学电气学重庆大学王志杰博士研究生哈尔滨工业大学电气工程及自动化学院徐殿国工学博士桂林电子科技大学电子工程与自动化学院张月玲硕士研究生华北电力大学冉鹏工学硕士华中科技大学王洪友硕士研究生南京航空航天大学自动化学院刘颖博士研究生海军工程大学纪锋博士研究生南京航空航天大学陈杰博士研究生上海交通大学电子信息与电气工程学院王晶鑫博士研究生哈尔滨工业大学电气工程及自动化学院高宏伟博士研究生南京航空航天大学吴元元博士研究生哈尔滨工业大学电气工程及自动化学院于泳工学博士浙江大学电气工程学院沈磊博士研究生江苏大学电气信息工程学院刘国海博士生导师哈尔滨工业大学电气工程及自动化学院陈伟博士研究生湖南大学电气与信息工程学院刘侃博士研究生天津大学电气与自动化工程学院王乐英博士研究生山东大学电气工程学院张冉博士研究生北京交通大学电气工程学院孙东森博士研究生哈尔滨工业大学电气工程及自动化学院寇宝泉博士生导师南京工业大学自动化与电气工程学院张兴华博士北京交通大学电气工程学院赵佳博士研究生天津大学电气与自动化工程学院宋鹏博士研究生中国矿业大学信息与电气工程学院卢胜利博士研究生重庆大学李景灿博士研究生华北电力大学电气与电子工程学院李和明博士生导师中北大学信息与通信工程学院姚舜才工学硕士江苏大学信息工程学院刘国海博士生导师华北电力大学能源动力与机械工程学院滕伟博士哈尔滨工业大学电气工程及自动化学院王高林博士北京邮电大学自动化学院吕新明工学博士浙江省电力试验研究院王文浩工学博生南京航空航天大学胡强晖硕士研究生哈尔滨工业大学电气工程及自动化学院赵品志博士研究生华中科技大学控制科学与工程系赵云博士研究生湖南大学电气与信息工程学院孟超博士研究生南京航空航天大学官文锋硕士研究生东南大学电气工程学院王玉彬博士研究生重庆大学李辉博士研究生西安交通大学电气工程学院杨黎晖博士重庆大学李辉教授太原理工大学机械电子工程研究所许小庆博士研究生重庆大学李辉教授上海大学机电工程与自动化学院张健滔博士后哈尔滨工业大学电气工程及自动化学院王高林博士后太原理工大学电气与动力工程学院张爱玲硕士哈尔滨工业大学电气工程系安群涛博士研究生南京航空航天大学郭鸿浩博士研究生南京航空航天大学杨建飞博士研究生南京航空航天大学自动化学院解超硕士研究生南京航空航天大学张倩影硕士研究生江苏大学电气信息工程学院左文全硕士研究生海军工程大学电力电子技术研究所欧阳斌博士研究生南京航空航天大学杨淋博士研究生南京航空航天大学王宇博士研究生东南大学黄明明博士研究生上海大学机电工程与自动化学院周庆生博士研究生南京航空航天大学 徐轶昊硕士研究生南京航空航天大学精密驱动研究所陈乾伟博士研究生南京航空航天大学精密驱动研究所张健滔博士研究生南京航空航天大学精密驱动研究所王金鹏博士研究生南京航空航天大学精密驱动研究所芦小龙博士南京航空航天大学航空宇航学院周盛强博士吉林大学机械科学与工程学院范尊强工学博士北京交通大学电气工程学院刘慧娟博士南京航空航天大学精密驱动研究所陈西府博士研究生南京航空航天大学精密驱动研究所时运来博士研究生西安交通大学电气工程学院陈梁远博士研究生华北电力大学电气与电子工程学院赵海森博士研究生哈尔滨工业大学电气工程及自动化学院陈伟工学博士上海大学机电工程与自动化学院代颖讲师南京航空航天大学郝振洋工学博士哈尔滨工业大学电气工程及自动化学院牛里博士研究生哈尔滨工业大学电气工程及自动化学院张晓光博士研究生厦门大学信息科学与技术学院蒋学程博士研究生中国科学院电工研究所朱磊博士研究生南京航空航天大学航空电源航空科技重点实验室鲁文其博士研究生南京航空航天大学鲁文其博士研究生南京航空航天大学杨建飞博士研究生清华大学电机工程与应用电子技术系朱昊博士研究生南京航空航天大学航空电源航空科技重点实验室杨建飞博士研究生清华大学姜恩泽硕士研究生北京交通大学电气工程学院郭希铮工学博士沈阳工业大学杨俊友博士生导师北京理工大学机械与车辆工程学院王昊博士研究生北京理工大学机械与车辆工程学院王昊博士研究生重庆大学廖勇博士生导师西安建筑科技大学机械电子技术研究所谷立臣博士生导师国防科技大学机电工程与自动化学院卢晓慧博士研究生西安交通大学电气工程学院张育兴博士研究生南京航空航天大学自动化学院刘颖博士研究生南京航空航天大学郝振洋博士研究生华中科技大学电气与电子工程学院阚超豪博士研究生江苏大学电气信息工程学院刘星桥博士华北电力大学电气与电子工程学院卢伟甫博士研究生第1作者出生年月第1作者邮箱第2作者名字第2作者职称1987pengdandan5129@孙路石博士1982favorweal@yahoo.郭吉丰博士生导师1972chenzhh@周楠硕士研究生1971cxz4688@辜承林工学博士1987renxinyu903@王晓琳副教授1982yuwang0125@邓智泉博士生导师1986decksy@1973cqulh@胡姚刚硕士研究生1982smart860@赵昌硕士研究生1978jkh_fy@沈建新教授1981qiang-liu09@段远源教授1983ypu1983@李华峰博士生导师1957liu.sch@张玉廷博士研究生1975pengbingfree@王成元博士生导师19801958syk@周云红博士研究生1982zyh1217@孙玉坤教授1985ujszzy@孙玉坤博士生导师1987jylu@马伟明中国工程院院士1979wpkunpeng@赵洪博士生导师1966zhaoyang2@董颖华硕士研究生1977djmailsky@孙华东学士1974sirssj@陈维山博士生导师1972pqijun@孟进博士1983adam-515@范瑜博士生导师1988nicknevil@王晓琳副教授1983ysz1356622@王晓琳副教授1985yzshenjian85@仇宝云博士1982zhangle_nuaa@周波博士生导师1984jinxinoy@;熊小伏博士1980military3cn@gmail.com吴峻博士1985sslee.scu.2004@ 李刚讲师1969lyphzh@周创立硕士研究生1971qiaomz@梁京辉硕士研究生19833021011058@黄进博士生导师1976wangxl@nuaa.盛旺硕士研究生1980kkkmin@黄进博士1970esx_2001@汤乐超博士1978wangdongl@vip. 吴新振博士1983xusong_long@马伟明博士1980yheast@陈阳生博士1975huadiangp@1968koubq@张鲁博士1971jtyang@赵明元教授级高工1983taiyong83@刘赵淼博士1965xhnian@csu. 1981gonghailong123@柴凤硕士生导师1973syf871@ 喻寿益博士生导师1969xuzg@谢少军博士生导师1972chenzhh@周楠硕士研究生1952zxl@1984周波博士生导师1982libingqiang@吴春博士研究生1970wuzhong@吕绪明硕士研究生1982powerleon82@姜建国博士生导师1969wanglm@金抚颖硕士研究生1977guoxinhua@1982qinghuadianji@邓智泉博士生导师1981hongjjie@李立毅教授1982ss80145@冯晓云博士生导师1960王昊博士研究生198515045863034@孙力博士1966zgcumt@袁庆庆硕士研究生1973wxsong@尹赟硕士研究生1961qinzeng@1982yuwang0125@ 邓智泉博士1982yuwang0125@邓智泉博士1982wisdom715@郭宏博士生导师1974xzgdlut@邵诚教授1983xwguo2008@王群京博士生导师1980zhouhuawei@温旭辉博士生导师198220025306@王广军博士生导师1960王伟博士研究生1986cheungyl_69@党选举教授1980ranpeng_ncepu@1984why_04@杨光源博士研究生1984liuying8498@周波博士生导师1983liuying8498@付立军博士1982陈家伟博士研究生1982姜建国博士生导师1955于艳君工学博士1983yuyong@hit. 1974zjushenlei@蒋生成硕士研究生1985ghliu@吴建华博士1964cwmailcn@张懿博士研究生1983lkan@徐殿国博士生导师1982wangleying@章兢教授。
本文网址:/cn/article/doi/10.19693/j.issn.1673-3185.03230期刊网址:引用格式:何红坤, 王宁, 张富宇, 等. 水面无人艇单目视觉伺服自主控制研究综述[J]. 中国舰船研究, 2024, 19(1): 15–28.HE H K, WANG N, ZHANG F Y, et al. Review of research on monocular visual servo-based autonomous control of un-manned surface vehicles[J]. Chinese Journal of Ship Research, 2024, 19(1): 15–28 (in Chinese).水面无人艇单目视觉伺服自主控制研究综述扫码阅读全文何红坤1,3,王宁*2,张富宇2,韩冰41 大连海事大学 船舶电气工程学院,辽宁 大连 1160262 大连海事大学 轮机工程学院,辽宁 大连 1160263 江苏海洋大学 海洋工程学院,江苏 连云港 2220054 上海船舶运输科学研究所,上海 200135摘 要: 单目视觉伺服采用相机模仿人眼视觉功能,感知周围环境和测量运动状态,是提高无人艇航行感知与控制自主性的重要手段。
首先,从基本原理出发,简述视觉伺服技术分类、相机透视投影原理和无人艇运动数学模型,为文献综述分析提供框架基础。
然后,根据任务复杂度,依次综述单目视觉伺服在无人艇航向控制、镇定控制、轨迹跟踪控制和集群控制等典型应用场景下的研究进展和挑战。
最后,系统性地总结无人艇单目视觉伺服自主控制的潜在研究方向和发展趋势。
关键词:无人艇;单目视觉伺服;航向控制;镇定控制;轨迹跟踪控制;集群控制中图分类号: U664.82文献标志码: A DOI :10.19693/j.issn.1673-3185.03230Review of research on monocular visual servo-based autonomous control ofunmanned surface vehiclesHE Hongkun 1,3, WANG Ning *2, ZHANG Fuyu 2, HAN Bing41 College of Marine Electrical Engineering, Dalian Maritime University, Dalian 116026, China2 College of Marine Engineering, Dalian Maritime University, Dalian 116026, China3 School of Ocean Engineering, Jiangsu Ocean University, Lianyungang 222005, China4 Shanghai Institute of Ship Transportation Science, Shanghai 200135, ChinaAbstract : The monocular camera can both perceive the surroundings and measure the motion states of an un-manned surface vehicle (USV) by imitating the functions of human vision, such that the monocular visual servo is an important means of improving the navigation perception and control autonomy of USVs. Starting from basic principles, the classification of visual servo methods, perspective projection model of the camera and mathematical model of the USV are briefly described so as to provide a fundamental framework for the lit-erature review. According to task complexity, the research progress and challenges of monocular visual servo-based USV control are then summarized in four typical scenarios, namely course control, stabilization control,trajectory tracking control and swarm control. Finally, the future trends of the monocular visual servo-based autonomous control of USVs are systematically summarized.Key words : unmanned surface vehicle (USV);monocular visual servo ;course control ;stabilization con-trol ;trajectory tracking control ;swarm control0 引 言海洋是全球气候变化的引擎、生物矿产资源的宝库、水上交通运输的命脉、国家安全防卫的要地。
【关键字】技术全垫升气垫船驾驶控制技术综述一、概述当常规水面舰艇在海上航行时,由于受到水的阻力,航行速度比较缓慢。
虽然随着技术的发展,船体结构以及动力装置有很大进步,但常规动力单体船航行速度一般在20至30节,传统模式下速度的可提升空间似乎很小。
由此,气垫船应运而生。
气垫船的工作原理如下:在船底部安放一个气垫装置,使船体与水面或者地面不直接接触,看起来好像悬浮在空中一样,从而很大程度上降低了航行阻力。
船上的发动机将气体由船的上方和四周压入气垫,然后从船底部喷出。
船的底部由橡胶围成,并且具有一定的韧性,由于进气速度与排气速度的差异,使得橡胶带内充满气流,这股气被橡胶带密封在船底部,从而形成一个气垫,隔离船体与水面。
由于气垫的隔离作用,使气垫船做到了水陆两用的功能在许多方面得到充分应用。
而气垫船在航行姿态方面,一般用肉眼很难发现,习惯上看一下船尾水面基本是平坦的,船梢有抬首即可。
气垫船按照航行状态主要分为全垫升气垫船和侧壁式气垫船两种船型。
全垫升气垫船:船的全部重量由围裙式的气垫撑起,使得船体与水面或者地面隔离,以大幅减小航行阻力,通过空气螺旋桨推进控制,获得超高的航行速度和两栖性能。
垫升式气垫船不但可在冰雪、、礁滩上航行,也可在无码头设施的沿海岛屿停靠,实施无码头组织不间断的后勤补给,有利于向纵深突击;同时也是猎雷艇、扫雷艇的理想艇型。
另外,还可用于在浅滩、滩涂、岛屿间担负巡逻警戒、交通运输、抢险救灾等任务。
全垫升气垫船系统主要包括垫升系统,推进系统和操纵面系统三部分。
垫升系统一般包括垫升风扇,进气口,围裙和气道。
垫升风扇将空气通过进气口压入围裙,产生气垫将船体托起水面。
通过对进气口与气道的有效操作,来控制气垫船的漂浮状态,提高气垫船的越障能力,使气垫船获得两栖作战的优越性能。
推进系统一般指的是以空气螺旋桨为主的空气推进装置,当全垫升气垫船在恶劣环境下行驶时,空气螺旋桨极易遭到损坏,现在人们开始考虑导管螺旋桨。
六旋翼飞行器与探测系统设计与分析的开题报告一、选题背景及意义随着无人机技术的快速发展,六旋翼飞行器作为一种新型的无人机,逐渐成为热门的研究方向。
六旋翼飞行器凭借其垂直起降、稳定飞行、灵活机动等特点,被广泛应用于军事、安防、消防、电力、气象、地质勘探等领域,对于现代化社会的建设与发展起到了极为重要的作用。
与此同时,随着现代传感器及控制技术的日益成熟,六旋翼飞行器配备探测系统,可以实现对于目标进行高精度、大范围的三维探测,为各行各业提供了更为便捷、高效、安全的解决方案。
本课题旨在探究六旋翼飞行器与探测系统的设计与分析,为六旋翼飞行器的实际应用提供理论基础和实践指导。
二、研究内容1. 六旋翼飞行器的设计与分析(1)六旋翼飞行器的基本结构、工作原理及特点(2)六旋翼飞行器的机体设计与材料选用(3)六旋翼飞行器的动力系统设计与控制(4)六旋翼飞行器的飞行控制与导航2. 探测系统的设计与分析(1)探测系统的基本原理(2)探测系统的主要组件及选型(3)探测系统的信号处理与数据传输(4)探测系统的定位与成像三、预期成果1. 六旋翼飞行器与探测系统的理论分析,总结出设计原则和技术路线;2. 编制基于MATLAB的六旋翼飞行器的模型仿真程序,进行系统模拟与性能评估;3. 基于实验平台进行硬件设计与系统实现,包括机体结构、动力系统、飞行控制、探测系统、信号传输与处理等;4. 对系统进行试飞试验,并对试飞数据进行分析与评估,验证系统的性能与可靠性。
四、研究工作计划1. 第1~4周:文献调研和理论研究,确定研究方向和研究内容;2. 第5~8周:进行六旋翼飞行器系统的模型仿真与性能评估;3. 第9~12周:进行六旋翼飞行器的硬件设计与系统实现;4. 第13~16周:进行系统的试飞试验,分析试飞数据,总结系统性能与可靠性;5. 第17~20周:编写毕业论文,撰写实验报告,并进行答辩。
五、研究经费本课题的研究经费主要用于购置硬件设备和实验器材等方面,预计总经费为XXXX元。
从研究方法论的角度分析硕士论文摘要:一直以来,研究生论文的撰写都要求有严格的研究方法,学术规范及写作流程。
本文运用研究方法论的相关理论及方法,分析殷炳兰的硕士论文“合作学习在大学英语中的综合应用”一文。
关键词:研究方法;合作学习;大学英语1、引言随着研究生队伍的日益扩大,研究生毕业论文的撰写对很多学生而言无疑是一项艰巨的任务。
要完成一篇好的论文,我们不仅需要好的题材和视角,同时也需要运用科学合理的研究方法。
在中国,大学英语教学正面临着严峻的挑战。
传统的大学英语教学方法,无法有效地提高学生的英语综合运用能力。
合作学习作为一种全新的教学方法,,受到许多研究者的青睐。
但它在大学英语教学中的应用仍然处于起始阶段。
“合作学习在大学英语中的综合应用”一文作者殷炳兰是一名大学英语教师,尝试用自己的教学实验来验证合作学习法在大学英语教学综合应用中的效果,以探求一种高效的教学方法。
本文将以殷炳兰的“合作学习在大学英语中的综合应用”一文为例,运用研究方法论的有关理论与方法分析此篇论文。
2、文献综述(1)不平衡顺序的混合式研究设计在社会科学领域里,设计研究一般有两大类别:定量研究和定性研究。
根据Punch的定义,定量研究和定性研究都是实证性研究。
但它们的数据形式不同,因此,区别这两种研究的最好和最简单的办法是检查所收集数据是否以数字的形式出现。
研究设计包括单一式研究设计和混合式研究设计。
混合式研究设计又可以分为平衡的混合设计和不平衡---顺序混合设计两种。
“合作学习在大学英语课堂中的应用”一文的作者根据其研究问题采用了不平衡的混合式研究设计。
在不平衡的混合式研究设计中,研究者使用定量和定性两种研究设计,但两种研究设计在回答研究问题时的作用不同。
在殷炳兰的此篇文章中,定量研究结果起主导作用,定性研究成果用来补充说明定量研究结果。
(2)实验研究实验研究属于定量研究。
实验最初运用于自然科学领域,如物理化学等学科。
在社会科学的研究中,研究人员在控制某些干扰变量后,对一个或多个变量进行调控处理,然后测量这些自变量对因变量的影响。
重庆xx大学毕业设计文献综述学生姓名:指导教师:报告日期:一、本课题所涉及的问题在国内(外)的研究现状本课题研究的是磨床尾座中批量生产的机加工工艺以及指定工装的设计。
机械制造业是国民经济最重要的基础产业。
而机械制造技术的不断创新则是机械工业发展的技术基础和动力。
现今,发达国家已普遍采用计算机辅助设计(CAD)、计算机辅助工程(CAE) 和计算机仿真等手段,广泛地采用加工中心或数控技术、自动引导小车(AGV)等,实现了制造系统自动化。
近10 年来,发达国家主要从具有全新制造理念的系统自动化方面寻找出路,如计算机集成制造系统、智能制造系统、敏捷制造、并行工程等。
自动测量装置、无心磨床、双端面磨床、轧辊磨床、导轨磨床,珩磨机和超精加工机床等相继制成使用,可作镜面磨削的高精度外圆磨床,砂轮线速度达60~80米/秒的高速磨床和大切深、缓进给磨削平面磨床,都是磨床的重要研究成果,现在微处理机的数字控制和适应控制也运用到了磨床上。
二、机械制造过程的相关基础知识1、结构工艺性的概念在机械设计中,不仅要保证所设计的机械设备具有良好的工作性能,而且还要考虑能否制造、便于制造和尽可能降低制造成本。
这种在机械设计中综合考虑制造、装配工艺、维修及成本等方面的技术,称为机械设计工艺性。
机器及其零部件的工艺性主要体现于结构设计当中,所以又称为结构设计工艺性。
零件结构设计工艺性,简称零件结构工艺性,是指所设计的零件在满足使用要求的条件下制造的可行性和经济性。
零件结构工艺性存在于零部件生产和使用的全过程,包括:材料选择、毛坯生产、机械加工、热处理、机器装配、机器使用、维护,直至报废、回收和再利用等。
2、影响结构工艺性的因素影响结构设计工艺性的因素主要有:生产类型、制造条件和工艺技术的发展三个方面。
生产类型是影响结构设计工艺性的首要因素。
当单件、小批生产零件时,大都采用生产效率较低、通用性较强的设备和工艺装备,采用普通的制造方法,因此,机器和零部件的结构应与这类工艺装备和工艺方法相适应。
上肢康复机器人研究进展综述作者:徐东徐晗李益斌张珝李晓龙来源:《现代信息科技》2020年第16期摘要:康复机器人已成为上肢运动功能障碍患者进行康复治疗的重要方法之一。
文章通过回顾国内外近年来的研究进展和研究成果,结合康复训练需求,将上肢康复机器人按照使用方式的分类方法,分为末端引导式和外骨骼式两大类,并对其中具有代表性的研究成果从机器人的结构设计、控制设计、康复训练内容、传感检测等方面进行着重介绍,为上肢康复机器人的研究与设计提供参考依据。
关键词:上肢运动功能障碍;康复治疗;康复机器人;外骨骼中图分类号:TP242;R496 文献标识码:A 文章编号:2096-4706(2020)16-0142-04Review on Research Progress of Upper Limb Rehabilitation RobotXU Dong,XU Han,LI Yibin,ZHANG Xu,LI Xiaolong(Auckland Tongji Rehabilitation Medical Equipment Research Center,Tongji Zhejiang College,Jiaxing 314051,China)Abstract:Rehabilitation robot has become one of the important methods for rehabilitation treatment of patients with upper limb motor dysfunction. This paper reviews the research progress in recent years at home and abroad and the research results,combined with rehabilitation training needs,the upper limbs rehabilitation robot according to the way of using classification method,divided into two categories:terminal heuristic and exoskeleton,and some representative research results from the structure of the robot design,control design,the rehabilitation training content,sensing detection is introduced,the research and design of the robot for upper limb rehabilitation to provide the reference basis.Keywords:motor dysfunction of upper limbs;rehabilitation treatment;rehabilitationrobot;exoskeleton0 引言脑卒中是一种急性脑血管疾病,严重危害人类健康和生命安全,具有高发病率、高死亡率以及高致残率的特点[1]。
(2)控制系统的硬件结构
通过小组初步讨论决定控制计算机使用研华的主机,运动控制卡选用ADT(深圳众为兴),电机选用伺服电机.
(3)控制系统的软件部分
主要采用VC进行编程,构建一个控制系统平台,在程序中给定坐标后,实现机械手从一点移动到另一点进行上下料的搬运工作。
之所以使用VC,一方面,ADT 的运动控制卡支持VC进行编程,另一方面,使用VC进行编程比较灵活,易于改进和变化。
(4)电路图部分
根据所选的硬件设备,使用Protel进行绘制.
三、作者已进行的准备及资料收集情况
在设计之前,翻阅了多篇关于机器人方面的书籍.对于控制系统的发展及其在机器人上的应用都有了相关的了解,这为建立机器人控制系统的模型做了一些前期准备工作.在此期间,还自学Protel和Solidworks等软件,为控制系统的电路设计和程序设计做好了准备。
还借了《单片机基础》、《48小时精通Solidworks2014》、《工业机器人》等书籍便于今后设计过程翻阅参考。
四、阶段性计划及预期研究成果
1.阶段性计划
第1周:阅读相关文献(中文≥10篇,英文≥1篇),提交文献目录及摘要。
第2周:翻译有关中英文文献,完成文献综述、外文翻译,提交外文翻译、文献综述.
第3~6周:控制系统总体设计,提交设计结果.
第7~11周:硬件元器件的选型、I/O口接线图,提交设计结果
第,12~14周:软件编程,装配图。
第15周:工程图绘制,工程图。
第16周撰写毕业设计说明书,提交论文,准备答辩。
第 32 卷第 3 期2024 年 2 月Vol.32 No.3Feb. 2024光学精密工程Optics and Precision Engineering应用于运动平台光电跟瞄系统的惯性参考单元研究综述李醒飞1,2,何梦洁1,拓卫晓1,2*,王天宇1,韩佳欣1,王信用1(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.深海技术科学太湖实验室,江苏无锡 214000)摘要:目标的变化和任务的拓展对光电跟瞄系统提出了快速机动的要求,从地基平台到车载、船载、机载、星载等运动平台是光电跟瞄系统的重要发展趋势。
基于惯性参考单元(Inertial Reference Unit,IRU)的视轴稳定方式是克服运动平台高频扰动,实现光电跟瞄系统微弧度甚至亚微弧度级跟瞄的主要技术手段。
针对运动平台光电跟瞄系统精确指向对载体基座扰动抑制的需求,分析和对比了IRU的各种技术方案,特别介绍了利用低噪声、宽频带惯性传感器敏感角扰动,并通过反馈控制实现视轴惯性稳定的系统方案。
从此类IRU系统的工作原理出发,阐述了系统的两种工作模式及功能特点,建立了系统数学模型。
然后,介绍了IRU的国内外研究进展及发展方向,指出惯性传感、支承结构和控制系统是决定IRU稳定能力的关键因素,梳理了三项关键技术的研究动态。
最后,总结了IRU的空间应用情况,并结合目前的应用需求对其未来应用领域进行了探讨。
关键词:惯性参考单元;运动平台;光电跟瞄系统;视轴稳定;扰动抑制中图分类号:V19 文献标识码:A doi:10.37188/OPE.20243203.0401Review on inertial reference unit applied to photoelectric tracking and pointing system of moving platform LI Xingfei1,2,HE Mengjie1,TUO Weixiao1,2*,WANG Tianyu1,HAN Jiaxin1,WANG Xinyong1(1.State Key Laboratory of Precision Measurement Technology and Instruments, Tianjin University,Tianjin 300072, China;2.Taihu Laboratory of Deepsea Technological Science, Wuxi 214000, China)* Corresponding author, E-mail: tuoweixiao@Abstract: The evolution of objectives and the broadening of tasks have heightened the need for swift ma⁃neuverability in the photoelectric tracking and pointing system. Shifting from ground⁃based to diverse mo⁃bile platforms such as vehicles, ships, aircraft, and spacecraft marks a significant trend in the development of photoelectric tracking and pointing systems. The stabilization of the line of sight using an inertial refer⁃ence unit (IRU) is essential to counteract the high⁃frequency disturbances encountered on these mobile plat⁃forms, enabling the system to achieve tracking accuracy at the micro⁃radian or even sub⁃micro⁃radian level. 文章编号1004-924X(2024)03-0401-21收稿日期:2023-06-30;修订日期:2020-08-10.基金项目:国家自然科学基金资助项目(No.62203322);中国博士后科学基金资助项目(No.2022M712372);深海技术科学太湖实验室“揭榜挂帅”项目资助项目(No.2022JBGS03001)第 32 卷光学精密工程This paper delves into various IRU implementation strategies to mitigate disturbances from the carriers, ensuring precise aiming of the photoelectric tracking and pointing system on moving platforms. It highlights a system design that employs low noise and wideband inertial sensors for angle disturbance detection and achieves line of sight stabilization via feedback control. The document details the system's operational modes, functional features, constructs its mathematical model, and reviews both domestic and internation⁃al research advancements and future directions in IRU technology. It emphasizes that inertial sensing, sup⁃port structures, and control systems are critical to IRU's stabilization performance, and it organizes the lat⁃est research trends in these three vital areas. Conclusively, the paper outlines the spaceborne applications of IRU and explores potential future application domains, considering current demands.Key words: inertial reference unit;moving platform;photoelectric tracking and targeting system;line-of-sight stabilization; disturbance suppression1 引言在天文观测[1]、激光通信[2]和量子通信[3]等领域,目标的变化和任务拓展对光电跟瞄系统提出了快速机动的要求,从地基平台到车载、船载、机载、星载等运动平台拓展是光电跟瞄系统的重要发展趋势。
文献综述二自由度振动系统的简单主动控制摘要:为了改善车辆的平顺性,本文建立了车辆的二自由度振动模型。
并阐述了振动主动控制中主要控制方法和策略及应用中存在的问题。
同时,介绍了国内的部分学者对振动主动控制方面的研究。
最后,并对其进行了相应的总结。
关键词:二自由度振动主动控制1引言振动主动控制主要应用主动闭环控制,其基本思想是通过适当的系统状态或输出反馈,产生一定的控制作用来主动改变被控制结构的闭环零、极点配置或结构参数,从而使系统满足预定的动态特性要求。
控制规律的设计几乎涉及到控制理论的所有分支,如极点配置、最优控制、自适应控制、鲁棒控制、智能控制以及遗传算法等。
本材料主要参考了《振动主动控制技术的研究进展》、《基于MATLAB的自整定模糊PID控制系统》等论文的相关方法。
21/4单轮车辆模型它是由车身质量ms、车轮质量mt、悬架弹簧刚度ks、车轮刚度系数kt、作动器组成。
其中,xg路面位移,Xb车身位移,Xw车轮位移。
3控制系统简介3.1独立模态空间法独立模态空间法的基本思想是利用模态坐标变换把整个结构的振动控制转化为对各阶主模态控制,目的在于直接改变结构的特定振型和刚度。
这种方法直观简便,充分利用模态分析技术的特点,但先决条件是被控系统完全可控和可观,且必须预先知道应该控制的特定模态。
3.2极点配置法极点配置法也称特征结构配置,包括特征值配置和特征向量配置两部分。
系统的特征值决定系统的动态特性,特征向量影响系统的稳定性。
根据对被控系统动态品质的要求,确定系统的特征值与特征向量的分布,通过反馈或输出反馈来改变极点位置,从而实现规定要求。
3.3最优控制最优控制方法就是利用极值原理、最优滤波或动态规划等最优化方法来求解结构振动最优控制输入的一种设计方法。
由于最优控制规律是建立在系统理想数学模型基础之上的,而实际结构控制中往往采用降阶模型且存在多种约束条件,因此基于最优控制规律设计的控制器作用于实际的受控结构时,大都只能实现次最优控制。
二自由度控制方法研究综述*张井岗太原重型机械学院自动化系,太原030024摘要:本文总结了二自由度PID 控制的原理、几种主要的二自由度控制器的设计方法和二自由度控制与其它一些控制方法的结合。
最后提出二自由度控制发展的前景和可以继续深入研究的方向。
关键字:二自由度控制、PID 控制Study of Two Degree-of-Freedom Control Method----SurveyZhangjing gangDepartment of automation, Taiyuan Heavy Machinery Institute, Taiyuan 030024Abstract :This paper summarized the principle of two-degrees-of-freedom control (TDF) PID control ,several major design methods of the TDF controller ,the combination of TDF control and other control strategy are explained in detail. Finally ,this paper points out the prospect of TDF control and suggest the direction of the further study of TDF control too.Key words: Two-Degrees-of-Freedom control ,PID control1引言在自动控制系统的设计过程中,目标值跟踪特性和外扰抑制特性是设计者关注的两个主要问题。
在过去的控制中,定值系统强调外扰抑制特性,随动系统强调目标值跟踪特性,两种特性均要求十分严格的场合比较少见。
但是随着高新技术的发展和应用,对自动控制系统的要求越来越高,同时要求目标值跟踪特性和外扰抑制特性最佳的系统愈来愈多。
而目前在工业控制中广泛采用的PID 调节器只能设定一组控制参数,(称一自由度控制方式,控制器结构图如下所示)一般来讲,若按干扰抑制特性来整定参数,则目标值跟踪特性差;若按目标值跟踪特性来整定参数,则干扰抑制特性差,所以PID 调节器的参数整定通常采用折衷的办法。
这样做一般能满足大多数控制系统的要求,但对于高性能控制系统则有一定的局限。
针对这图1 一自由度控制器结构图图2 二自由度控制器结构图 所谓二自由度控制一般说来就是:采用图二这种控制系统结构,设法将控制器C 分解,通过不同的设计方法,找到两组独立的参数并设计出两个独立的控制器,分别用来获得最优的目标跟踪值特性和干扰抑制特性,从而达到控制系统的期望特性。
* 本项目受山西省自然科学基金项目(20001038)资助r r本文总结了近年来二自由度控制的研究成果,分下面几个部分加以说明。
2二自由度控制算法2.1二自由度PID控制算法用于控制系统中的传统PID控制器结构简单、性能可靠,也易整定。
但它只能整定一组参数,因而“目标值跟踪特性”和“外扰抑制特性”不能同时处于最优。
对于高性能和特殊性能的控制系统则难以获得满意的控制效果。
二自由度PID控制正是在这种情况下产生的。
最早是由I.M.Horwitz提出的。
文[1]提出的基本型二自由度PID控制,采用I.M.Horwitz所述构成法,将上述两组参数分离,用传统方法整定PID控制器参数,再根据经验一次性选取二自由度化系数。
文[2]又进一步提出改进型和高级二自由度PID控制。
文[3]给出了一种二自由度实用型PID控制器,即在常规的PID控制器前加一个设定值滤波器。
文[4-6]则将二自由度PID控制器应用于加热炉自动燃烧控制系统和电炉温度控制系统中。
2.2几种主要的二自由度控制器的设计方法高性能电机控制系统在工业中被广泛应用。
一般来讲,高性能电机控制系统必须有很好的速度跟踪响应和负载调节响应。
然而,在过去的几十年间用来控制电机的多种方法如最常见的PI控制等普遍存在一个问题:即不能同时获得最优的速度跟踪响应和负载调节响应。
针对这一问题就交流调速系统和伺服系统台湾学者 C.M.Liaw提出了一种基于被控对象传递函数主导能量特征值理论[7]的二自由度控制器的设计方法。
文[8-12]对高性能电机伺服系统运用主导能量特征值方法设计控制器。
为了提高系统的鲁棒性文[10]引入了一个带时滞补偿的鲁棒控制器。
文[11]引入了模型跟随控制器,文[12]引入了时滞补偿控制器。
这种方法设计的二自由度控制器结构简单,便于实际系统应用。
缺点是设计方法复杂,需求解非线性方程组,也没有指出控制系统性能和控制器参数之间的调整规则。
一般伺服系统相应于指令输入和反馈输出具有两控制自由度,分别对指令输入和反馈输出设计控制器的二自由度控制设计可以分别获得系统的跟踪控制特性和外扰抑制特性。
文[13]优化设计。
其跟踪特性用Kwakernack 对电子换向电机伺服系统的转速控制器进行二自由度H∞多项式法,而抑制特性用Zames的模型变换近似逆概念。
针对低敏感度伺服系统,文[14、15]应用二自由度理论将系统的给定响应特性和反馈特性分解开来,然后在特性设计中将系统设计成低敏感度系统。
文[16]提出了基于反馈线性化的感应电机二自由度控制系统。
抗扰调节优化理论设计,跟随调节器采用PI调节器。
文[17]针对交流伺服系统提出一种二器采用H∞自由度鲁棒控制器。
文[18、19]分别讨论了用于直流调速系统的二自由度控制。
文[20]针对机器人运动控制系统设计了一种二自由度控制器。
所有这些设计都是基于H优化理论。
他们∞的主要思路是:根据Youla参数化法将补偿器C分解,引入两个自由参数根据控制系统性能指标分别设计控制器C。
将跟踪特性和外扰抑制特性分解后对自由参数的设计方法可以灵活多样,不仅算法各异结构也可以多变。
但是这样设计出的控制器阶次较高,实际系统难以实现。
另外一种二自由度控制器的设计方法就是采用内模控制原理的设计方法。
内模控制(IMC)是一种实用性很强的控制方法,其结构简单、设计简便、在线调节参数少,对抗扰性的改善和大时滞系统的控制更好,内模控制具有很好的鲁棒性。
文[21、22]借助内模控制的原理,提出一种二自由度内模控制器的结构。
针对实际控制过程的特点,将被控对象分解,通过设计二自由度内模控制器来实现系统的鲁棒控制,并给出了系统性能与参数调节之间的关系。
文[23、24]针对被控对象为线性系统的一般控制系统,提出了基于线性二次型最优控制理论(LQ)的二自由度控制器设计方法。
通过优化两个独立的二次型性能指标来获得最优的系统跟踪性能和调节性能。
该文在此基础上引入了积分补偿、状态观测器等。
此外,文[25]还提出一种二自由度回路成型的控制器设计方法,控制系统中引入了状态观测器、在线阶跃响应模型。
2.3二自由度控制与其他一些控制方法的结合采用二自由度控制虽能使控制系统性能有所改善,但存在的问题是鲁棒性差。
这主要是因为二自由度控制器的参数不能随着操作系统和被控对象的参数的变化而变化。
目前人们通过将二自由度控制与其它控制方法相结合来改善系统的鲁棒性。
文[26、27]将二自由度控制方法与模糊控制方法结合起来,用于交流系统的速度控制和伺服系统的位置控制上。
为了提高系统鲁棒性,获得更好的目标值跟踪响应,文[26]提出在二自由度控制系统的基础上,在前向通道中引入系统参考模型,在反馈通道中引入模糊控制器。
文[27]就速度控制而言提出一种所谓的“二自由度模糊控制器”结构。
为了解决引入模糊控制器后使系统在设定点附近波动的问题,还设计了两个PI控制器。
文[28]提出将二自由度控制与自学习能力和计算能力都很强的神经网络相结合的思路。
在二自由度控制系统的基础上,通过一个辨识机制实时地将伺服系统的参数辨识出来,做为神经网络的输入,神经网络的输出则做为校正后的二自由度控制器的参数。
期望参数和由神经网络估计参数之间的全局误差用梯度下降法使其达到最小。
这样二自由度控制器参数就能自适应的变化从而获得期望的目标值跟踪特性和外扰抑制特性。
为了解决二自由度控制的鲁棒性问题,文[29]在二自由度控制中引入滑模控制,将二自由度控制作为内环,非线性控制的滑模控制作为外环。
并在直流伺服电机的位置控制中对此控制策略加以验证。
文[30]提出了一种改进的遗传算法,成功的用于二自由度PID参数的智能整定中,并突破了常规调节器参数的限制。
以上简要介绍了二自由度控制与其它一些控制方法的结合,它们主要都针对系统鲁棒性的问题提出了一些改进方案,仿真或实验证明是有效的,但是在具体实现时还存在一些问题。
3二自由度控制的其它应用二自由度控制方法的研究除了上述几个在理论上成熟并在实践中得以应用的方法外,还在时滞系统、连续或离散系统、多变量系统以及二自由度控制器的结构方面有所发展。
如文[31]提出了一种二自由度Smith预估器,该文在传统的Smith预估器基础上作了一些修改,显著提高了预估器对参考输入和扰动的调节能力。
文[32、33]分别就连续情况和离散情况提出了基于双重准则的二自由度预测控制。
文[34]提出一种基于解耦方法的多变量二自由度控优化控制。
制方法,控制器的设计采用两步法。
文[35]针对多变量随机系统提出二自由度H∞文[36]针对多变量随机系统提出了二自由度前馈和反馈优化控制的策略。
文[37]针对时滞效应提出二自由度电流控制方法。
文[38]则将二自由度控制应用到高性能轧钢机的速度控制器上。
此外文[39]还提出了两种新的二自由度控制器结构。
由此可看出,二自由度控制已不局限在PID控制和高性能电机系统的控制领域,随着对它的进一步研究二自由度控制会日臻完善!4二自由度控制的发展前景和需要解决的问题二自由度控制以一种崭新的思路——将目标值跟踪特性和外扰抑制特性分解,分别设计相应的控制器使得这两个主要的性能指标同时达到最优,从而达到期望的控制效果。
基于此近年来二自由度控制已应用到多种控制系统中,受到越来越多学者的关注。
当然二自由度控制与其它控制方法一样,既有优点又有缺点。
国内外许多学者已经注意到可以把二自由度控制和其它一些控制方法结合起来解决目前存在的问题。
无论就二自由度控制理论本身还是在与其它控制方法相结合上都存在许多困难和问题,还需进一步深入研究。
文章认为可以从以下几个方面进行研究:(1)二自由度PID控制。
可将神经网络与二自由度PID控制相结合,用于PID控制器参数的智能整定。
但是将神经网络引入后对神经网络的结构、相应算法及算法的收敛性等都需进一步研究。
(2)二自由度控制器与神经网络、模糊控制的结合。
C.M.Liaw等人在这方面进行了一些研究,但主要针对交流伺服系统,而且系统构成庞大。