第六章系统的稳态误差第十六讲-23页PPT资料
- 格式:ppt
- 大小:653.50 KB
- 文档页数:23

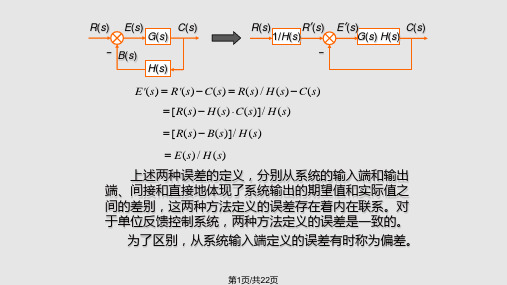
第六章控制系统的误差分析和计算6-1 稳态误差的基本概念6-2 输入引起的稳态误差分析6-3 扰动引起的稳态误差分析6-4 减少系统误差的途径6-5 动态误差系数计算一、误差与偏差1.误差(输出端的误差):控制系统理想输出量x oi (t )与实际输出量x o (t )之差,e (t )=x oi (t )-x o (t ),E (s )=X oi (s )-X o (s )。
稳态误差:误差信号的稳态分量,记为:e ss 。
2.偏差(输入端的误差):控制系统输入信号x i (t )与反馈信号y (t )之差,记为:ε(t )=x i (t )-y (t ),ε(s )=X i (s )-Y (s )。
稳态偏差:偏差信号的稳态分量,记为:εss 。
()i X s ()s G 1()s H ()s N ()s G 2()o X s -+++()s Y ()s ε()oi X s ()s μ()s E -+1X i(s)()sH)()E s)()()sEs=sHH(s)=1,E(s)=(t)-x o 误差(输出端的误差):e(t)=xoi偏差(输入端的误差):ε(t)=x(t)-y(ti静态位置误差系数()01010K⎧⎪+⎨⎪⎩型系统Ⅰ型以上的系统阶跃信号输入下有一定的稳态偏差(εss ≠0);阶跃信号输入下稳态偏差为零(εss =0)。
ss p11K ε=⇒+()()1K 11i n v j j G s s T s ν=-==+∏静态速度误差系数()K 1s v 0110K K ∞⎧⎪⎪==⎨⎪⎪⎩型系统Ⅰ型系统Ⅱ型以上系统型系统:能跟踪斜坡信号,但有一定的稳态位置误差(εss ≠0);ss v1K ε⇒=()()1K 11i n v j j G s s T s ν=-==+∏静态加速度误差系数()2K 1s G )a 011K K⎧⎪∞⎪==∞⎨⎪⎪⎩型系统Ⅰ型系统Ⅱ型系统型系统:能跟踪加速度信号,但有一定的稳态位置误差(εss ≠0)。