全球Mini四轴飞行器第一厂
- 格式:doc
- 大小:931.50 KB
- 文档页数:18

四轴飞行器串级ADRC轨迹跟踪控制胡文华;曹仁赢【摘要】四轴飞行器是一个欠驱动系统,具有非线性、强耦合、易受干扰等特点,为此本文设计了一种串级自抗扰控制器(ADRC),并采用改进粒子群算法进行控制器参数自整定.串级ADRC的外环为位置控制环,内环为姿态角控制环.为避免外环产生的高频信号噪声不利于内环控制,外环采用线性ADRC,而内环采用非线性ADRC.Simulink仿真结果表明,该方法对四轴飞行器轨迹跟踪具有良好的控制效果,并能有效抑制外部干扰.【期刊名称】《武汉科技大学学报(自然科学版)》【年(卷),期】2019(042)004【总页数】6页(P299-304)【关键词】四轴飞行器;自抗扰控制;轨迹跟踪;粒子群算法;参数自整定;Simulink仿真【作者】胡文华;曹仁赢【作者单位】华东交通大学电气与自动化工程学院,江西南昌,330013;华东交通大学电气与自动化工程学院,江西南昌,330013【正文语种】中文【中图分类】V249.12;TP273四轴飞行器具有功能多样、飞行灵活、能垂直起降的特点,在基础设施建设、农业、能源、公共安全、新闻媒体等领域已获得广泛应用。
从控制角度出发,四轴飞行器为欠驱动、强耦合、非线性的复杂系统,难以精确建模,同时易受外部环境的干扰。
四轴飞行器最传统的控制方法是PID控制。
文献[1]在PID控制基础上加入限制积分饱和的模块,以避免系统产生超调,但外部干扰会影响飞行器的稳定性;文献[2]针对姿态角速率、姿态角分别设计内环LQR(线性二次型调节器)控制以及外环PID 控制的双回路闭环控制器,改善了系统的控制性能,但LQR本质上依然是线性控制,模型不确定对其控制效果有较大影响;文献[3]采用鲁棒控制,对外界干扰和负载不确定具有一定的适应性;文献[4]采用自抗扰控制(active disturbance rejection control, ADRC)技术,并使用粒子群算法对ADRC参数自整定,既利用了ADRC的抗干扰性能,也解决了ADRC参数过多、整定费时、难以获得最优解的问题,具有重要借鉴意义;文献[5]采用有限时间反步控制并结合辅助输入饱和补偿器,避免了旋转运动的奇异性;文献[6]将反步法和滑模控制相结合,并将定位算法扩展到无人机中,提高了非线性控制器的控制性能。


四轴飞行器的设计随着电子技术的快速发展,四轴飞行器被越来越多的人们喜欢和使用,特别是用于航拍和军事领域,在不久的将来必然也会应用于越来越多的其他领域。
文章设计一款基于STM32F103C8T6为主控系统的小型四轴飞行器,采用keil5为软件开发环境,用MPU6050芯片进行姿态采集,根据采集到的数据进行姿态分析,进而控制其稳定飞行。
标签:四轴飞行器;单片机;PID1 无人机的发展历史及意义无人飞行器是指具有动力装置,而不要求有专业操纵人员的飞行器。
它利用螺旋桨通过转动形成向地面的气流来抵消机身的质量,可实现独立飞行或者远程控制飞行。
相对于固定翼无人机,旋翼无人飞行器的发展就较为缓慢,这是因为旋翼无人飞行器的控制系统较为复杂,早期的技术不能满足飞行要求。
然而旋翼机具备所有飞机和固定翼无人机的优点,其成本低,结构简单,无大机翼的限制,具有自主起飞及下降功能,事故代价低等特点。
四轴飞行器是多旋翼飞行器中结构最简单的一种,由于其应用前景广泛,很快就吸引了众多研究者的注意,特别是以美国等西方国家为主的大学在无人机的控制算法研究以及导航等方面取得了不少成果。
在我国,北京理工大学在基于PID控制算法,姿態控制方面也取得一定的成果。
国防科技大学从2004年开始对四轴飞行器相关技术展开研究,并自主设计了四轴飞行器的原型样机。
但四轴飞行器真正的进入公众视野却是2012年2月,美国宾夕法尼亚大学的VijayKumar教授在TED上做出四旋翼飞行器里程碑式的演讲[2]。
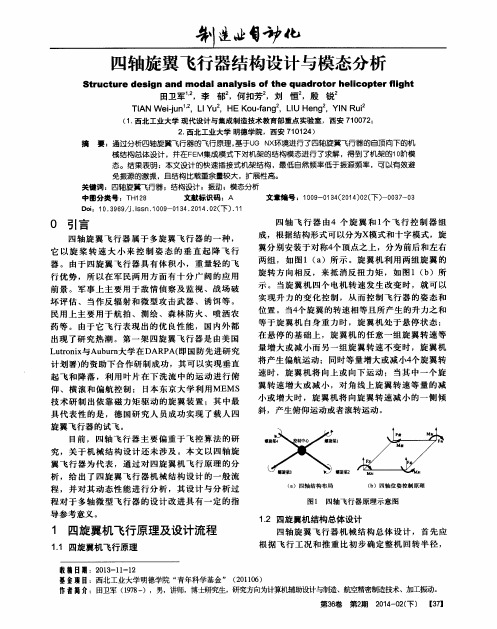
2 四轴飞行器的动力分析2.1 四轴飞行器的飞行模式四轴飞行器的飞行模式主要包括十字模式和X字模式两种,如图1所示。
十字模式下的飞行方向与其中一个电机的安装方向一致,而X模式下的四轴飞行器前进方向指向两个电机中间。
由于十字模式可以直接明了的分清四个电机在四轴飞行器飞行过程的作用,所以操纵简单,但动作灵活性差。
X模式飞行模式复杂,但动作灵活。
本次课题的四旋翼飞行器设计采用X模式。

用户名UIDEmail请登录后使用快捷导航没有帐号?注册窗体顶端找回密码密码注册窗体底端快捷导航首页迟些门户开放时,指向门户首页全部贴汇总技术贴汇总所有技术性的帖子汇总,方便阅读非技术汇总所有非技术性的帖子汇总,方便阅读帮助Help无图快速版阿莫电子邮购本论坛由阿莫电子邮购独家赞助窗体顶端搜索热搜: 雕刻机阿莫淘金春风电源窗体底端本版用户amoBBS 阿莫电子论坛»论坛首页› 机械电子› 四轴飞行› 多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理.../ 4 页下一页返回列表查看: 15733|回复: 126多旋翼直升机(四轴飞行器)之开源整合平台[电路模组原理图][复制链接]电梯直达1楼发表于2011-1-20 12:12:02|只看该作者|倒序浏览一、相关技术文件:1. 程式控制基底ATmega 8ATmega8 技术文件点击此处下载ourdev_611065Q176XE.PDF(文件大小:2.45M) (原文件名: ATmega8_cn.PDF)2. 无线模组CC2500 (2.4G Hz 无线IC) 技术文件点击此处下载ourdev_611064KBBYJG.pdf(文件大小:1.26M) (原文件名: cc2500_cn.pdf)RDA T212 (PA+LNA) 技术文件点击此处下载ourdev_611063XH619C.pdf(文件大小:229K) (原文件名: RDA_T212.pdf)RDA ES02 (SP2T Switch )技术文件点击此处下载ourdev_611062ACP4OA.pdf(文件大小:29K) (原文件名: RDA_ES02.pdf)3. 无刷马达电子调速模组FDS7764A (N-Channel) 技术文件点击此处下载ourdev_612408FW8MGC.pdf(文件大小:273K) (原文件名:FDS7764A.pdf)TPC810 (P-Channel) 技术文件点击此处下载ourdev_612409Y3Y2UA.pdf(文件大小:293K) (原文件名:TPC8103.pdf)4. 液晶萤幕显示模组16x02 (液晶萤幕) 技术文件点击此处下载ourdev_612410MVKKXZ.zip(文件大小:365K) (原文件名:LCD_1602.zip)5. MAG 9 FOD 飞行姿态感测模组(3轴磁力计+3轴线性加速计+3轴陀螺仪)LSM303DLH (磁力计+线性加速计) 技术文件点击此处下载ourdev_612411H66HEH.zip(文件大小:2.02M) (原文件名:LSM303DLH.zip)IMU-3000 (陀螺仪) 技术文件点击此处下载ourdev_612412ORGL5T.zip(文件大小:1.93M) (原文件名:IMU_3000.zip)6. GPS模组U-BLOX NEO-5Q (GPS) 技术文件点击此处下载ourdev_612413K5MRZI.zip(文件大小:3.03M) (原文件名:NEO_5.zip)7. 超音波测距模组HIN-232 (RS-232 5V至10V升压IC) 技术文件点击此处下载ourdev_612414E8JL5V.pdf(文件大小:564K) (原文件名:HIN232.pdf)LM-324 (OP) 技术文件点击此处下载ourdev_612415WGYN7Y.pdf(文件大小:599K) (原文件名:LM324.pdf)二、TWI(I2C) 通讯规划(用于各个电路模组通讯)M8 TWI(I2C) 规划(PDF档) 电路图档(Eagle档) 点击此处下载ourdev_611067JVY9ZR.zip(文件大小:34K) (原文件名:TWI_BLOCK.zip)三、电路模组列表0.Eagle 用的零件档点击此处下载ourdev_612416HE44VJ.zip(文件大小:531K) (原文件名:lbr.zip)1.发射机控制模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611068Z9N5AQ.zip(文件大小:48K) (原文件名:Transmitter_Control.zip)发射机控制模组照片(是TWI Master)< br> (原文件名:TRANSMITTER_13.JPG) 引用图片2.接收机控制模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611197NAW7UP.zip(文件大小:40K) (原文件名:Reciver_Control.zip)接收机控制模组照片(也是飞控模组, 是TWI Master 其他模组均为Slave)< br> (原文件名:RECIVER_03.JPG) 引用图片3. 数字式 2.4GHz 无线电模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611069RC47A2.zip(文件大小:54K) (原文件名:Transmitter_Radio.zip)数位式 2.4GHz 无线电模组照片<br> (原文件名:RECIVER_02.JPG) 引用图片4.液晶萤幕显示模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611070KCJ8LL.zip(文件大小:38K) (原文件名:Transmitter_Display.zip)液晶萤幕显示模组照片<br> (原文件名:RECIVER_05.JPG) 引用图片5. USB TO TWI(I2C) 模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_611392MGUB5H.zip(文件大小:49K) (原文件名:USB2TWI.zip)USB TO TWI(I2C) 模组照片<br> (原文件名:USB2TWI_02.JPG) 引用图片6. 超音波测距模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612431EWSNQI.zip(文件大小:58K) (原文件名:Sonar.zip)超音波测距模组照片(原文件名:SONAR_01.JPG)7. GPS模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612432DH4YN8.zip(文件大小:52K) (原文件名:GPS.zip)GPS模组照片( 用RS-232 COM3 连进PC , 简易十字铜天线长10CM,同轴线焊在交叉点)(原文件名:GPS_01.JPG)GPS模组照片(由M8 解析NMEA 取经纬度...等参数, 飞控板由TWI(I2C) 取得参数)(原文件名:GPS_02.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_03.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_04.JPG)GPS模组照片(U-BLOX NEO-5Q)(原文件名:GPS_05.JPG)8. MAG 9 FOD 飞行姿态感测模组[3轴磁力计+3轴线性加速计+3轴陀螺仪] (PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612433RVOFBN.zip(文件大小:56K) (原文件名:MAG_9FOD.zip)MAG 9 FOD 模组照片(磁力计+线性加速计LSM303DLH 数字16bit)(原文件名:MAG9FOD_01.JPG)MAG 9 FOD 模组照片(陀螺仪IMU-3000 数字16bit)(原文件名:MAG9FOD_02.JPG)9. 无刷马达电调模组(PDF档)+电路图档(Eagle档) 点击此处下载ourdev_612434VG3ZSB.zip(文件大小:56K) (原文件名:BLMC.zip)无刷马达电调模组照片(由商用电调改装而成)(原文件名:BLMC_01.JPG)无刷马达电调模组照片(原商用电调)(原文件名:BLMC_00.JPG)无刷马达电调模组照片(P-Channel TPC8103 + N-Channel FDS 7644A)(原文件名:BLMC_02.JPG)无刷马达电调模组照片(用漆包线重焊接脚电路)(原文件名:BLMC_03.JPG)10. 无刷马达无刷马达照片(10x45螺旋桨+ DIY 无刷马达组)(原文件名:BLDC_MOTOR_01.JPG)补充内容(2012-3-28 14:03):29楼有补齐失去连结的照片补充内容(2012-3-28 14:05):28楼有更新资料补充内容 (2012-3-28 14:33):117楼:补齐1楼失去连结的档案补充内容 (2012-3-28 14:41): 42楼: 更正电调原理图资料。
【概述】1、diy四轴需要准备什么零件无刷电机(4个)电子调速器(简称电调,4个,常见有好盈、中特威、新西达等品牌)螺旋桨(4个,需要2个正浆,2个反浆)飞行控制板(常见有KK、FF、玉兔等品牌)电池(11.1v航模动力电池)遥控器(最低四通道遥控器)机架(非必选)充电器(尽量选择平衡充电器)2、四轴零件之间的接线与简单说明4个电调的正负极需要并联(红色连一起,黑色连1一起),并接到电池的正负极上;电调3根黑色的电机控制线,连接电机;电调有个BEC输出,用于输出5v的电压,给飞行控制板供电,和接收飞行控制板的控制信号;遥控接收器连接在飞行控制器上,输出遥控信号,并同时从飞行控制板上得到5v供电;【基本原理与名词解释】1、遥控器篇什么是通道?通道就是可以遥控器控制的动作路数,比如遥控器只能控制四轴上下飞,那么就是1个通道。
但四轴在控制过程中需要控制的动作路数有:上下、左右、前后、旋转所以最低得4通道遥控器。
如果想以后玩航拍这些就需要更多通道的遥控器了。
什么是日本手、美国手?遥控器上油门的位置在右边是日本手、在左边是美国手,所谓遥控器油门,在四轴飞行器当中控制供电电流大小,电流大,电动机转得快,飞得高、力量大。
反之同理。
判断遥控器的油门很简单,遥控器2个摇杆当中,上下板动后不自动回到中间的那个就是油门摇杆。
2、飞行控制板篇一般简称飞控就是这个东西了。
飞控的用途?如果没有飞控板,四轴飞行器就会因为安装、外界干扰、零件之间的不一致型等原因形成飞行力量不平衡,后果就是左右、上下的胡乱翻滚,根本无法飞行,飞控板的作用就是通过飞控板上的陀螺仪,对四轴飞行状态进行快速调整(都是瞬间的事,不要妄想用人肉完成),如发现右边力量大,向左倾斜,那么就减弱右边电流输出,电机变慢,升力变小,自然就不再向左倾斜。
什么是x模式和+模式?购买飞控的时候老板都要问这个问题,刷买什么模式的,以上就是区别。
X模式要难飞一点,但动作更灵活。
【连载7】Keil5的安装过程和软件的破解学单片机做四轴飞行器项目故事《STC15 单片机实战指南(C 语言版)》一书以一坚科技研发的飞天三号(FSST15-V1.0)实验板为硬件平台,以《深入浅出玩转STC15 单片机》为配套视频,由清华大学出版社权威出版,并且分别是STC 官方大学计划和高校高性能联合实验室推荐教程和视频,版权归作者和清华大学出版社所有。
本资料以个人学习、工作经验以及宏晶科技单片机技术为素材,以单片机初学者、单片机项目开发者为对象,教大家如何走进单片机,继而达到开发工程项目(如:四轴飞行器设计,多功能收音机等)为目的。
限于时间和水平关系,资料中难免有过失之处,望各位高手批评指教,多多拍砖,拍累了,你们休息,我继续上路。
现已连载的方式免费共享于电子发烧友网,供单片机新手们参考学习,可以自由下载传阅,但未经作者许可,不得用于任何商业目的,转载请注明出处。
作者| 残弈悟恩编辑| Garen一个人,两脚使劲踩1 小时的自行车,只能跑10 公里;开着宝马,一脚轻踩油门 1 小时就能跑100 公里;乘飞机,吃着美味、睡着大觉,也能跑1000 公里。
同样的努力,不一样的平台和载体,结果就是不一样。
可问题是如何找到一个好的平台,适合自己的才是最好的。
从无到有,或者到合适,都需要一个由量变到质变的过程。
通过这章的学习,力争读者掌握单片机开发的基本的软件调试环境和硬件开发平台。
2.1 硬件平台—FSST15开发板工欲善其事必先利其器。
单片机的学习书本的理论知识,更需要实际操作的硬件平台,否则一切是都是空中楼阁。
除了硬件平台,还需软件开发工具,用于软件开发的有Keil、IAR、ST VisualDevelop 等,用于下载的有STC-ISP、ST VisualProgrammer 等,但有些开发软件自带了下载功能。
由于此书以STC的IAP15W4K58S4为核心处理器,所以这里主要介绍用于STC单片机开发的KeilμVision5和下载用的STC-ISP。
作业旺季,盘点国内植保无人机10KG 16Kg植保平台四轴植保机架植保无人机机架折叠打药飞机时至今日,中国的植保机在行业内已经成为世界引领者。
不仅拥有全球最多样化的植保机型,在相关标准和规范上也处在行业的领先地位(10KG 16Kg植保平台四轴植保机架植保无人机机架折叠打药飞机叩叩叩叩2 3 5 6 5 9 9 9 6 3)。
现正值植保旺季,为此优选出多款国内主流类型的植保无人机,从类别、技术参数等多方位进行盘点分析(分为多旋翼篇及单旋翼篇),供广大“机友”参考。
—多旋翼篇—电动篇P20 植保无人机品牌:广州极飞科技有限公司40°大角度探测;30米防地飞行;雾化颗粒调解范围宽:粒径85-140微米;喷洒流量:0-1000毫升/亩。
自主飞行;智能遥控;云RTK;雷达防地;自主避障;变量施药。
P30 植保无人机品牌:广州极飞科技有限公司IP65级防水性能;5.2克高分子材料喷盘重;智能AB点与喷洒区域网格化记忆功能;1000米遥控范围。
智能药箱;多元充电;储能充电器;A2手持地面展台T16 植保无人机品牌:深圳市大疆创新科技有限公司药液装载量提升至16L,喷幅提升至6.5米。
喷洒系统配备4个液泵及8个喷头,流量最高可达4.8L/min。
在实际作业中,T16作业效率可达每小时150亩。
全新模块化航电系统,配备双IMU及双气压计,采用动力信号冗余设计,保障飞行安全。
GNSS+RTK 双冗余系统,带来厘米级定位精度的同时,支持双天线抗磁干扰技术。
MG-1S 农业植保机品牌:深圳市大疆创新科技有限公司配备一体式遥控器;集成5.5英寸1080p高亮显示屏;遥控器续航时间长达5 小时;雷达感知;A3飞控;高效率、强沉降两种模式可满足多种作业环境的需求。
A16 植保无人机品牌:江苏荣耀天翃科技有限公司加长臂型“x”方向六轴机型;轴距长度1300*1950mm,实现7分钟/20亩作业效率;工作电压44.4V (12S);飞行速度4-6m/s(推荐4m/s);最大流量5L/Min;喷洒流量最大2L(推荐0.8L);作业效率20亩/架次。
全球Mini四轴飞行器第一厂
深圳大疆创新科技在小型多旋翼无人机市场独占鳌头,成为业界关注的焦点。但深圳的另一
家公司,将四轴飞行器做进玩具市场(定价低于100美元),主攻海外市场,年出货量近
300万台,成为全球Mini四轴飞行器出货最大的企业。可能有业内人士已经猜到了,这家
公司便是工厂位于东莞塘厦的哈博森科技有限公司。
笔者日前能过朋友约访到了这家公司的CEO Sam Lee,了解到这家公司的详细发展情况,
也通过与李总的交流,更多地知道目前小型多旋翼无人机市场。
采访团队从深圳出发,向北半个小时就到了东莞塘厦。这里与深圳相邻,梅观转莞深的第一
个收费站出去就到了哈博森科技的工厂。它是一座看上去最普通的厂房,只有三层的车车间,
再加一栋不高的办公室。李总就在办公室里接受了电子工程专辑编辑们的采访。
哈博森公司的成立背景与研发团队
深圳市哈博森科技成立于2011年,成立时间不到四年。说起进入到小型多旋翼无人机市场,
Sam Lee认为是机缘巧合。从2003年做外贸开始,Sam Lee主要是专注在玩具市场领域。
2009年开发过微型直升飞机、航模这样的产品,后来不经意就进入到了微型多旋翼飞行器
的市场。“因为有一定的技术积累,毕竟它跟直升机、航模这样的产品技术有些类似。”
深圳市哈博森科技CEOSam Lee在接受电子工程专辑的专访
在进入市场后,很快哈博森就占据了低端飞行器的市场,出货量很快就达到全球第一。后来
就放弃了玩具飞机的产品。“原因是四轴飞行器相比玩具飞机更容易操控。”Sam Lee说。
首先产品出货的是国外的市场,九成以上的产品都是出口。他分析认为,“要是国内的玩具
消费观念不一样。消费者的兴趣现在还没有普及到这个产品。”
据行业人士透露,目前在深圳主流要15、6家做飞控的方案公司。但哈博森采取的方式是
自主研发产品。之所以这样做,Sam Lee认为目前市场上存在的方案公司,可能会存在一
种短期的目标,没有长远的计划。“比如说某一个新的机型开发,可能要花几年的时间才能
做好。方案公司可能没有这么好的耐心去做,”Sam说,“即使他开发出来了,他也可能会卖
到其它公司。我们就不存在技术的独占权,不会有自己的技术优势,更不会有自己的专利技
术了。”
目前公司的研发团队(软件、硬件和ID)团队有约30人,全都在深圳的Office。Sam预测
明年要扩张到100人。
哈博森有让供应商定制自己的MCU,在成本上有优势。
微型多旋翼无人机市场的竞争格局
在将来的产品策略上,Sam Lee坦言,“大疆是我们的直接竞争对手。”因为我们的团队还没
有大疆大,所以会采取跟随的策略。“大疆有风投,这种方式有利也有弊。大家的策略也都
很明确,就是投资到研发上。我们肯定要要跟他们直接竞争,这一点很明确。”
至于业界纷传很多资本在进入到微型飞行器这种领域,Sam也予以肯定。已经有好几家的
风险投资要投到哈博森,还有一家国外的企业出资几亿想要收购,但都被Sam拒绝了。深
圳一直是山寨很厉害。在手机、数码产品不断挤出的背景下,很多老板们都看好四轴飞行器
领域,扛着资金找团队找企业的情况,非常多。
“我不认为这个行业会被快速山寨化。这个产品的研发投入周期很长,不像其它产品有公板
公模可以抄。我们当初做了几年才出产品,别人要花的时间也一样。即使是请个博士现在来
做,他也要做两三年。等两三年他做出来,我又会推出新产品了。”Sam回应道。
哈博森工程师李工向记者展示一款新开发的产品,据说这款产品定价将高于10000元
哈博森工程师李工也认为,微型飞行器的技术门槛看上去不高,似乎发烧友和极客们买来开
发板,写上程序或是抄到程序就可以让飞机飞起来,但这种做法只能是玩家自己玩,离真正
的产品化还有很多的距离。
“自己将产品做成飞起来是一回事,但做成商品完全是另一回事。例如,产品如何轻量化、
如何做到实时操控、如何有更多的玩法,这都是需要团队去思考。发烧友用的开源板,可设
置的参数太多,不便于给普通消费者使用。更重要的是,用的材料供应商不能有保障大量供
货,也不能大量生产。”
“此外,商品化的东西要能耐用,不能玩几次就摔坏,安全性可靠性没有保障,售后和维修
怎么保障?我们现在不担心极客或发烧友们这样的团队。”李工。
更重要的是,无人机微型飞行器(或Drone遥控飞行器)这个市场才刚刚起步,可以发挥
想像的空间太大了,远不至于是同质化竞争。就如同大疆DJI专注在飞控,做一些航拍等行
业专业应用和发烧友市场,哈博森从低端和玩具市场找到突破一样,还有无数的市场机会值
得大家去开发。
“低空飞行应用是最有想像空间的,它不属于法律禁止的领域,同时又是刚刚起步。这个领
域可以诞生无数个产品。”Sam总结认为。
技术上面临的挑战与创新
在技术开发方面,哈博森也在与一些高校的团队在合作,例如西北工业大学的团队来开发新
的产品。
另外,新的产品有用到安卓系统,哈博森认为不能用最新的系统,“新的安卓版本不稳定,
容易出现死机。一死机则很可能出现坠机。所以会用市场上普及率最多的版本。”Sam说。
这是在天猫上卖的不错的一款四轴飞行器
创新上要做很多,一方面是做出,还申请了降落伞防摔防撞系统的专利。英特尔也有来找哈
博森合作,希望今后可以在产品上采用他们的处理器。不过,李总证实目前哈博森还没有采
用英特尔的芯片,虽然英特尔的一个宣传视频中有哈博森的产品。
哈博森展示的四轴飞行器的降落伞防坠专利
飞行避撞技术目前还在预研选型当中。包括红外、超声波、视频、激光等多种技术。“避撞
技术现在还面临着如何避免干扰的难题,做不到百分百准确可靠。例如,红外红在日光下就
不行。我们将来采用视觉避撞技术的可能性最大。”Sam表示。
微型飞行器相关法规与标准
目前国家并没有针对飞行器的管理标准与法规,国外谷歌和亚马逊已经将无人飞行器用在快
递,国内也传出顺风也在试用无人机送快递。
通过在飞控上的GPS来设置禁飞点,防止微型机在机场等地飞行 ,是目前厂商们要考虑
的技术
Sam表示,事实上亚马逊用无人机送快递的案例是给岛上送货,将来也只会用于人较少的
地区的快递送货。人员密集区不会采用无人机送货。
他表示国家还没有推出相关的标准和法规,但是大家在产品内的GPS程序上标一些禁飞点
的座标,例如飞行时用GPS进入实时的比对,防止在机场等地区飞行。
关于飞行高度上,美国FAA限制不能飞得高于400英尺。同时FAA也在规划一些新的规
定,限制飞机的体积和重量。
在采访完成后,电子工程专辑编辑记者也随李工工程师参观了哈博森的工厂产线,以了解更
多的实际情况。
工厂产线参观
哈博森在东莞塘厦的工厂主要是用来四轴飞行器机身和的组装以及成品的质检与包装,外
壳、控制板、PCB板和马达都是外供。这种生产方式既可以节省成本,让供应商来做得最
好,同时也可以更好地控制好出货和保障产品的质量。
下面是工厂的参观照片。
进入二楼的生产线
据说这是最好卖的机型之一。
另一个机型的外壳展示,还没有装上机翼,但非常漂亮。
组装产线的特写
一条组装产线的特写,产线有多长,主要是看工序的复杂度。
换条线看,要用到万用表和电烙铁
等待测试的飞机
等待测试的飞机
已经装上防撞带的机型,对于初学者来说,它可以大幅提升飞机的寿命
等待测试的飞机,应该是抽检吧,我的眼已经看花了。
装进包装盒的小飞机,很小很精致
这里有个小故事:据说这种包装盒上的手指头的那个镜头的图像设计,苹果说这是独家的设
计,如果再使用的话就要告哈博森。哈博森等着苹果。对于不少设计被侵权的做法,哈博森
也会发律师信。国外的有用,国内的则哈哈哈,你懂的。
试飞小飞机
试飞一下,很酷。
来个特写,LED灯在黑夜中更吸引人。
质检员要抽检,严格按ISO规定来检测,合格率不到就不能出货,在出货问题上,老板签
字不如他们的签字权力大。
一款带目镜的遥控器
要试一款带目镜的遥控器,可以看到飞机镜头里的实时视频。感觉很酷。对了,补充说一下,
遥控器上有两个传输频段,遥控指令是2.4GHz,视频传输则是5.8 GHz。
来个特写。
带显示屏的遥控器,发烧友的最爱。
获奖的迷你四轴飞行器机型
最后再做个小补充:
哈博森的产品在国外超市上架销售,并在美国的高速旁边的广告牌上做广告。在欧洲参展期
间,一款迷你四轴飞行器机型还拿了德国纽伦堡玩具奖和英国伦敦玩具奖。
以及这张PPT上李总的助理Judy为电子工程专辑记者在介绍PPT中打上的热情扬溢的文
字。我答应过大家要放到文章中的。