太阳能追光系统
- 格式:pptx
- 大小:1.25 MB
- 文档页数:16
信息通信INFORMATION&COMMUNICATIONS2020 (Sum.No205)2020年第1期(总第205期)追光式太阳能小车智能控制系统姜涛,张倩,禹博,付子宁盧路通演金,王一荻(沈阳工程学院,辽宁沈阳110136)摘要:新能源是未来发展的方向,把光伏发电和智能小车相结合,可以提离太阳能发电效率和增加能源供给。
本文设计了一种基于太阳能供电的智能小车模型,系统可以实现自动向光运动、自动避障、光伏发电等功能。
整个系统由单片机贡责小车的运动控制,采用驱动芯片控制步进电机工作,应用光敏电阻、红外等传感器采集光照和路障等环境信息,通过单片机的控制决策,实现信号处理、运动控制和光伏发电等功能,本设计是新能源小车的典型模型,有很大的现实意义。
关键词:太阳能;小车;单片机;智能控制中图分类号:TP368文献标识码:A文章编号:1673・1131(2020)01-0095-020引盲随着汽车自动化水平的提高和人工智能技术的产生,新一代智能汽车的发展已成趋势叭目前,比较先进的智能汽车已经可以将各种路况信息输入到控制系统的微型计算机中,通过计算机的指令来控制汽车完成自动驾驶等动作。
同时,目前全球石油资源紧缺、能源消耗不断增高、全球气温变暖引发的海平面不断升高引起的各种环境问题,新能源的开发与应用已全面展开叫因此决定了未来的电子产业必定朝着智能化、新能源的方向发展。
太阳能是目前最为清洁的能源,对人类来说是一种新能源叭此次我们设计的追光式太阳能小车智能控制系统的能源来自于太阳能,将太阳能转换为小车提供动力的电能。
将光伏发电系统加载在电动小车上,通过自动跟踪算法,寻找光源的最佳位置充电,也可以为小车提供电源,在小车运动过程中可以躲避障碍。
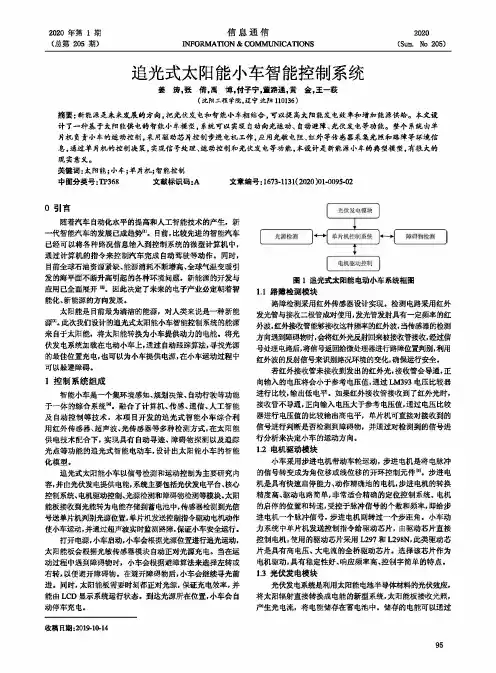
1控制系统组成智能小车是一个集环境感知、规划决策、自动行驶等功能于一体的综合系统叫融合了计算机、传感、通信、人工智能及自动控制等技术。
本项目开发的追光式智能小车综合利用红外传感器、超声波、光传感器等多种检测方式,在太阳能供电技术配合下,实现具有自动寻迹、障碍物探测以及追踪光点等功能的追光式智能电动车,设计出太阳能小车的智能化模型。
太阳能电池板自动追光系统设计作者:张宗磊徐源杨晨来源:《科技视界》2017年第07期【摘要】本文设计了一种太阳能电池板自动追光系统。
该系统将单片机选为控制器,太阳能电池作为传感器,步进电机作为执行机构,采用光电追踪方式,控制太阳能电池板自动旋转对准太阳光,能有效提高太阳能的利用率,具有一定的实用价值。
【关键词】太阳能;单片机;步进电机;光电追踪0 引言能源是关系一个国家全面发展的重要因素;太阳能作为一种新兴能源不但能够有效解决能源短缺的问题,还能在很大程度上改善环境污染,具有较大的研发前景。
我国的太阳能资源非常丰富,但是对太阳能的开发还面临着很大挑战,如何提高太阳能电池板对太阳能的采集效率是充分利用太阳能的关键。
本文设计的太阳能电池板自动追光系统可实现对太阳的全方位跟踪,具有两个自由度的跟踪能力。
其原理图如图1所示。
利用AT89C51单片机对桥式电路的检测结果进行逻辑运算后,进而控制能够实时调整高度角和方位角的步进电机工作,从而实现对太阳光全方位跟踪。
该系统结构简单、成本低,能够有效提高太阳能的利用率,具有有较好的推广应用价值。
1 追踪方式的选择目前,用于实现追踪太阳的方法较多,概括为两类:视日运动轨迹追踪和光电追踪方式。
太阳的运行轨迹是有规律的,通过对太阳和地球之间的位置关系进行分析,利用球面三角公式来计算出太阳在任何地点任何时间相对于地球的位置,被称为视日运动轨迹追踪方式。
此方案建立在太阳运行规律的天文算法的基础上,需要利用微处理器对太阳的高度角和方位角进行实时计算,再利用电子系统驱动电机实现对太阳的实时跟踪。
其优点是不受天气变化的影响。
缺点有:(1)计算过程复杂,开发成本很高;(2)属于开环控制,容易产生积累误差,且无法自动消除这一误差。
光电追踪方式是利用对太阳光朝向的即时检测实现追踪,需要用到光敏元件组成检测电路。
比如,采用四象限硅光电池传感器作为光电转换元件,以微处理器为核心构建电路控制系统,通过对四象限的四个输出电压信号的分析和运算,输出相应的控制信号去驱动电机,最终由电机驱动执行机构完成追光的任务。
太阳能光伏-热伏发电板的自适应追光系统设计与实现摘要:太阳能光伏-热发电系统操作过程中,需要以有效的发电形式,提高发电效率,制定完善的自动追光系统,实现多光电二极管的自适应效果,及时处理追光系统中的复杂结构问题。
依照光敏电阻的适应情况,加强电板对光源的追踪处理效果。
采用有效的负反馈适应方式,提高追光精度的控制,逐步增强系统的位置消耗。
硬件系统采用有效的光敏电阻感应强度,及诶朱AD转换电路,以驱动太阳能光伏-热伏形式,实现发电板平面照射,优化光敏电阻与板面的夹角,调整追光区域、误差量,确定整个装置的机械结构设计和电图设计,做好有效的仿真数据分析。
太阳能光伏-热伏的自适应,提升二极管追光系统的操作,提升追光系统的机械设计,优化追光的稳定优化水平。
关键词:太阳能;光伏-热伏;追光系统引言:伴随着经济的快速发展和社会的进步,需要加强太阳能发电安全清洁优化分析,制定有效的参考资料分析,自带追光系统的发电装配形式,以有效的太阳能发电装置操作,明确太阳能的整体利用率,确保光系统的实际应用合理性。
调整机械装置转动的稳定性,需要采用合理的时间操作,依照追光板的发电效率进行分析,提升最大限度的太阳能利用率,满足自动追光系统的工作品质要求。
开展天阳能装配的自动光系统研究,不断提升性能,提升整体应用体制。
一、太阳能光伏-热伏系统的整体设计方案按照太阳能光伏追踪操作,通过光电检测追踪处理,实现光电检测追踪精度的提升,以可靠、稳定性,调整追踪精度,完善可靠稳定应用,确保整体系统的的多光电二级操作,完善整体系统结构设计的优化。
以光电检测追踪原理的分析,提出光敏电阻的自适应系统,通过硬件、软件的操作方案,加强光敏电阻的优化,完善结构的稳定性。
图太阳能光伏-热伏转换1 设计方案自适应追光系统设计过程中,需要依照硬件设计、软件设计,调整负反馈的适应原理,从整体装配的效果,调整横竖光敏电阻的电压信号差,电动追踪太阳能的发电,实现光敏电阻电压差信号对光电追踪的减少。
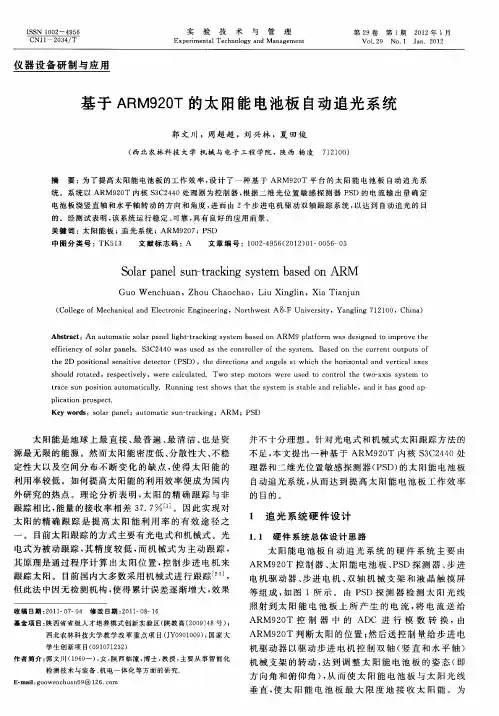
太阳能电池板自动追光控制系统设计蔺金元【摘要】In order to use solar-powered, a system that solar panel can automatic track the sun is produced. The system use combined method of solar movement tracking and maximum power point seeking, it controls solar energy conversion utilization device automatically and rotated it to aim at the sun, and it can raise the solar energy absorption rate. In the system, single- chip microcomputer is used as the controller, small solar battery is used as sensor, and stepper motor is used as actuating mechanism. The system has some practical value for devices which rely on the solar energy.%为实现太阳能供电,介绍了一种太阳自动追踪系统.该系统采用视日运动跟踪与寻求最大功率点相结合的方法,控制太阳能转换利用装置自动旋转去对准太阳,能有效提高太阳能的吸收率.该系统采用单片机作为控制器,小型太阳能电池作为传感器,步进电机作为执行机构.对于各种利用太阳能作为能源的自动装置而言.这种自动追踪系统具有一定的实用价值.【期刊名称】《宁夏工程技术》【年(卷),期】2012(011)004【总页数】4页(P355-358)【关键词】视日运动;太阳能;自动追踪;最大功率点【作者】蔺金元【作者单位】宁夏大学物理电气信息学院,宁夏银川750021【正文语种】中文【中图分类】P631.4宁夏地处沙漠边缘,地广人稀,许多地方远离输电干线,需要太阳能供电系统供电.太阳能资源丰富,是理想的清洁能源,太阳能的开发利用有着积极的意义.目前,太阳能能源转化装置已经应用广泛,常见的有光伏发电、太阳能照明、太阳能热水器、太阳能温室、太阳灶等装置.在大多数装置中,太阳能转换利用装置都是固定不动的,不能够根据太阳位置的变化而变化,这样就造成了太阳能的转化效率降低.本课题研究了一种单片机控制的自动追踪系统.该系统能够自动旋转,可有效提高太阳能的转化效率.相同条件下,采用自动跟踪发电设备要比固定发电设备的发电量提高30%左右[1].1 系统结构和工作原理目前,在太阳追踪系统中用于实现追踪太阳的方法很多,但是总结起来主要有2类方式:一类是光电追踪方式,另一类是视日运动轨迹追踪.这2种方法中,前者是闭环的随机控制系统,能依靠传感器准确检测太阳的位置,但受天气影响大,雨天无法工作;后者是开环的顺序控制系统,通过时间计算出此时本地太阳的位置,有一定的累计误差[2].本文将2种方法结合起来,设计了一种基于单片机控制的单轴太阳跟踪系统.该系统在晴天时采用闭环控制,阴天时采用开环控制,利用这两种方法的优势互补实现了更加准确的追踪定位.该系统的结构图如图1所示.图1 系统结构图该系统采用AT89C51作为控制器,可以快速计算、准确定位;同时,该系统采用步进电机作为执行机构,采用专业的时钟芯片DS1302提供准确时间,以便在阴天时计算出系统的动作,并且准确控制系统在20:00复位到初始位置;另外,该系统采用一种小型太阳能电池作为系统的传感器.这种小型太阳能电池最高输出电压值为5 V,将它们分别放置在太阳能转换利用装置的4个角上检测太阳光的强度. 该系统开始工作时,先读取4个传感器的值,如果输出都低于1 V,则可以判断为阴雨天,此时系统执行视日运动子程序,控制器读取时钟模块的日历时间信息,计算出此时本地太阳的高度角和方位角,决策出步进电机此时应有动作状态,进而通过控制器发出指令,驱动电机转动跟踪;如果4个输出中至少有1个高于1 V,则可以判断为晴天,此时传感器的输出电压随时反馈给控制器,由控制器计算实现闭环控制实时测量追踪.2 视日运动跟踪算法阴天时,该系统采用视日运动跟踪.所谓视日运动跟踪就是根据太阳的运动规律实时跟踪太阳的位置.其实,在地平坐标中,太阳的位置虽然时刻都在变化,但其运行轨迹具有严格的规律性,太阳的位置可以用高度角α和方位角ψ来确定.其中:高度角α是指地球上的观测点同太阳中心点的连线与地平面的夹角;而方位角ψ是指地球上的观测点同太阳中心点的连线在地平面上的投影与正南方向的夹角.这2个参数可以由当前时间和当地的经纬度计算[3-4].(1)高度角α的计算.式中:δ为太阳赤纬角;φ为当地的地理纬度角;ω为时角.其中:Ts为当时的时间,以24小时制取值.时角上午为正,下午为负.(2)方位角ψ的计算:3 最大功率点的获取晴天时,该系统采用的方法是追踪最大功率点(MPPT),就是找到太阳能电池输出功率最大的位置.MPPT采用的是自寻优的概念,实时测量光伏阵列的输出功率,进行比较后,自动地寻找到最大功率点.不断地寻找,不断地调整,不断地再寻找,如此周而复始.该方法可以自动适应一年四季太阳位置的变化,无需人工干预,十分有利于提高系统的全年效率[5].太阳能电池的U-I特性具有非线性,并且它随着外界环境(温度、日照强度)的变化而变化,在某一特定的温度或日照强度下总存在着一个最大功率点.太阳能电池阵列的输出功率特性曲线如图2所示[6].由图2可知,最大功率点几乎分布在一条垂直线的两侧,可以将最大功率点看作是对应着某一个恒定电压Un.图2 太阳光伏电池输出功率特性该系统采用一个小型太阳能电池板作为系统的位置传感器,每隔5 min读取1次输出电压.如果测量值比设定的最大值小,则需要驱动步进电机正向转动;如果测量值比设定的最大值大,则需要驱动步进电机反向转动;如果测量值等于设定的最大值,则不需要驱动步进电机转动,说明此时位置合适.该系统采用干扰观测法,这种方法能快速准确地进行MPPT控制,但在最大功率点附近振荡运行,稳态输出波形有一定波动,偏差较大.因此,扰动步长设定无法兼顾跟踪精度和响应速度,需进行多次尝试才能选定最佳步长,而且在光照强度剧烈变化时会出现误判.所以这种方法适用于对控制精度要求不是特别高的情况.例如,各种独立太阳能路灯、太阳能景观系统等小功率系统,采用干扰观测法进行MPPT控制足以满足控制精度,且参数调整合理匹配.4 主要模块电路设计4.1 时钟芯片由于该系统在阴天时需通过当前时间进行太阳位置计算,因此,需要采用实时时钟,系统选用了时钟芯片DS1302.该器件具有实时时钟,可提供秒、分、时、日、星期、月和年(闰年补偿).DS1302有2个电源,一个是主电源Vcc2,另一个是备份电源Vcc1.主电源Vcc2同单片机一样接5V电源,而备份电源Vcc1使用的是2节1.5V干电池.在系统电源被切断的情况下,DS1302也能正常工作,保证日期、时间的准确性.X1,X2用来外接晶振,晶振的频率为32.768kHz.4.2 A/D转换A/D转换的主要作用是把位置传感器两端采集的电压值(0~5 V的模拟量)转换成数字量.该系统采用PCF8591芯片进行A/D转换,它具有8位的二进制转换精度.传感器采集的模拟量与数字量对应关系的典型值对应:+5 V对应值为FFH,2.5 V对应值为80H,0 V对应值为00H.PCF8591与单片机的连接如图3所示. 图3 PCF8591与单片机的连接图4.3 传动机构传动部分决定着该系统效率的高低、精度的大小.该系统是单轴跟踪,只调整方位角,步进电机就是依靠带动齿轮传动机构来调整太阳能转换利用装置的方位角ψ到位的.该系统在带传动和齿轮传动中选择了齿轮传动.齿轮传动可以做成开式、半开式及闭式,该系统选择了开式齿轮传动.在开式齿轮设计中主要考虑以齿根弯曲疲劳强度和保证齿面接触疲劳强度这2个准则,系统选择了2个齿数分别为16和96的一套齿轮,模数m=2.5,齿数z1=16,z2=96,传动比 i=6,压力角a=20°,齿顶系数 ha=1,齿根系数hf=0.25,中心距a=140.齿轮是重要零件,由于该系统要求的旋转速度不高,考虑到使用寿命和露天的工作环境,选用了优质碳钢(45#钢)材质的齿轮,耐磨性好,如果没有过大的外力损伤,一般不会坏.5 软件设计5.1 系统主程序该系统主程序包括初始化单片机功能模块、选择当前工作方式环节,从而保证可靠驱动步进电机,控制太阳能转换利用装置始终正对太阳.主程序流程如图4所示. 图4 主程序流程图5.2 测量追踪子程序测量追踪子程序是在晴天时启动,通过读取传感用太阳能电池的输出电压判断太阳能的吸收状态,从而调整太阳能转换利用装置准确到达位置.子程序流程如图5所示.5.3 视日运动追踪子程序图5 测量追踪子程序流程图视日运动子程序是在阴天时启动,通过输入的当地经纬度信息、读取的时间信息计算出太阳的准确位置,去实现跟踪.子程序流程如图6所示.图6 视日运动子程序流程图6 系统安装太阳能电池板的方位角与高度角对其吸收太阳能都有很大影响,考虑到是单轴追踪,只有东西方向可以自动调整,所以,在安装过程中要根据计算数据固定好南北方向的安装角.因为是固定角度,在角度选取上一般采用牺牲一些夏天的能量,尽量增加一些冬天的能量的原则.例如,某地区夏至日的最大高度角为74.6°,相应安装角为15.4°;冬至日的最大高度角为27.7°,相应安装角为62.3°,则取其平均值为(15.4°+62.3°)/2≈39°.考虑到 9:00—11:00,13:00—15:00 的情况,此安装角可适当调大(+5°~+8°).该系统也可以随季节调节安装角,夏季略小,冬季略大,而春季和秋季可与当地纬度相当.该系统在安装时,首先要确定安装地点的经纬度,计算出高度角和方位角.再根据时间和季节进行估算定位.在宁夏地区,考虑到 9:00—11:00,13:00—15:00 的情况,可以使夏季为20°~24°,冬季为67°~70°,春分、秋分以调节到当地纬度加10°为好.7 结语该系统采用的这种自动跟踪太阳的方法,能够使太阳能转换利用装置始终保持在太阳能吸收率最高的位置,控制方法简单,容易实现,可靠性也比较高,尤其在沙漠干旱地区这种强光照环境中,是一种能更好地吸收利用太阳能的好方法,可以广泛应用到太阳能路灯、热水器、太阳灶等太阳能转换利用装置中.【相关文献】[1]肖玉华,熊和金.基于ATmega8的双轴太阳跟踪器设计[J].电子设计工程,2010,3(18):46-47.[2]郑小年,黄巧燕.太阳能跟踪方法及应用 [J].能源技术,2003,24(4):149-151.[3]乔彩风,宋世军,何忠.数字视频监控系统的智能化实现[J].计算机与现代化,2007(12):46-48.[4]许春东.嵌入式数字视频监控系统中串口通信的设计与实现[J].电子技术,2005(11):61-64.[5]刘洋,白连平.太阳能光伏发电最大功率跟踪控制器的研究[J].节能,2008(12):8-9.[6]卢琳,殳国华,张仕文.基于MPPT的智能太阳能充电系统研究[J].电力电子技术,2007,41(2):96-98.[7]刘京诚,任松林,李敏,等.智能型双轴太阳跟踪控制系统的设计[J].传感器与微系统,2008,27(9):69-71.。
哈尔滨工业大学毕业设计(论文)开题报告题目名称:基于单片机的太阳能智能追光系统设计学院:机电学院专业:电气工程及其自动化学生姓名:XX学号:XX指导教师:XX职称:教授2019年12月25日毕业设计(论文)开题报告二、研究内容1.主要研究内容、目标及拟解决的关键问题 (1)研究内容:①硬件设计:根据所设计的太阳能智能追光系统的总体结构和需求,进行追光系统主电路、单片机控制电路、温控电路、时钟电路、复位电路及外围电路等硬件电路的设计及元器件的选型。
②软件设计:在完成硬件的基础上,对太阳能智能追光系统各部分进行软件方面的研究,系统软件采用模块式的软件原则,主干程序有主程序、中断保护程序和键盘中断服务程序,其余是可被调用的子程序模块,有启动子程序等。
③充放电设备设计:主要采用PWR2.5标准充电口,实现追光系统的双电源供给,避免出现电池没电导致的无法工作问题。
(2)研究目标:本设计主要是利用单片机知识,设计一个太阳能智能追光系统,使太阳能板在最大限度的采集太阳能的同时,提高光电转换效率,降低功耗。
在保证成本低廉、结构简单的前提下,实现较高的跟踪精度和转换效率。
(3)拟解决的关键问题: ①对太阳位置检测系统的设计。
②步进电机动作指令系统(与太阳同步偏移)的设计。
③对太阳能板有效地控制降温。
2.拟采取的研究方法、技术路线、实施方案及可行性分析(1)研究方法:首先,对太阳能智能追光系统的国内外研究现状进行调研;其次,构建太阳能智能追光系统的整体结构框图,设计系统的软硬件结构,完成各个模块的协调,完成软件程序的编译;最后,在Proteus 上进行系统的测试运行工作,解决存在的问题和不足。
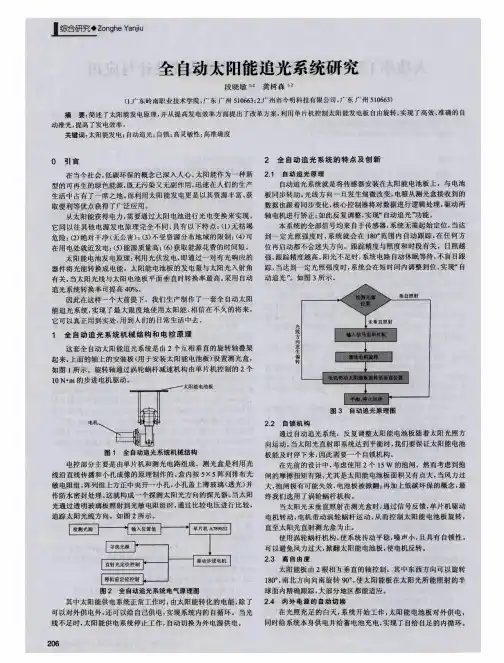
(2)技术路线:(3)实施方案:太阳能智能追光系统主要由四部分组成,分别为单片机组成的中央处理单元、光电转换电路部分、A/D 转换模块电路部分、步进电机驱动电路部分。
整体设计框图如图1所示。
查阅相关文献确定研究方向完成硬件电路设计及元器件的选型熟悉软件,完成软件程序设计Proteus 仿真调试进行实物制作与调试图1 整体设计框图①光电转换电路:光电转换装置接收太阳光将光信号转换成电信号,其原理是随着光照强度的变化,光敏电阻的阻值随光照强度变化而变化,从而实现数据的接收。

太阳能自动追光电池板的模糊神经网络控制系统摘要:本文将差压式太阳能电池板输出的信号作为追光系统的输入信号,以A Tmeg a16单片机作为控制核心,采用时钟追踪与光电追踪相结合的追踪模式。
系统直接以太阳能电池板作为检测装置,将光信号转换为电信号,并以A/D转换芯片转换成数字信号。
最终通过控制步进电机,控制太阳能电池板的自动追光。
系统运用模糊神经网络系统对信号进行处理,通过对光照强度等参数进行对比分析,确定了模糊神经网络的单元层数,隶属度等,从而实现了太阳能电池板自动追光的模糊神经网络控制。
关键字:差压式太阳能电池板A Tmega16单片机神经网络模糊控制高斯隶属度引言太阳能是一种清洁绿色能源,是最丰富的可再生能源形式。
而自动追光系统可使太阳能电池板发电率提高40%。
传统的太阳能电池板自动追光系统主要有时钟追光系统和传感器追光系统]41[-。
由于外界环境的影响,传统控制系统理论的复杂性与所要求的精确性之间存在尖锐矛盾。
模糊逻辑控制已成为智能控制的重要组成部分。
对模糊控制理论和技术的研究和探讨还在不断进行]85[-,这种新颖的控制理论和技术正处于发展和提高的进程中。
模糊系统知识抽取比较方便,而神经网络却可以直接从样本中进行有效的学习,总的来说,神经网络适合于处理非结构化信息,而模糊系统对处理结构化信息,而模糊系统对处理结构化的知识更为有效。
模糊神经网络从提高神经网络的记忆性,透明性和鲁棒性出发,将模糊化概念与模糊推理规则引入神经网络的神经元,连接权和网络学习中,有效的发挥了各自优势,弥补各自的不足,可有效的控制太阳能电池板的自动追光系统。
1太阳能自动追光系统模型1.1 机械结构太阳能电池板通过两个相互垂直的旋转轴叠架分别与两个步进电机相连接。
www�ele169�com | 77电子基础0 引言太阳能是一种清洁、高效并且永不衰竭的新能源,应用前景十分广阔。
然而,太阳能迄今为止仍未得到大规模的应用,其中主要的原因是太阳能的光转换效率较低,太阳能电池材料的制作成本较高,导致太阳能的发电成本远远高于石油、煤炭等常规能源。
因此,开发转换效率高、成本低的新材料,以及提高太阳能发电效率是目前推广太阳能发电的主要手段,而提高太阳能发电效率的方法之一就是进行高效的太阳光追踪。
2016 年,我国颁布的《国家创新驱动发展战略纲要》中明确提出“加快太阳能等清洁能源和新能源技术开发、装备研制及大规模应用。
”因此,本文旨在设计一款太阳能电池板追光控制系统,实时地跟踪太阳方位,使太阳能电池板以最佳入射角接受最大光强的太阳光照射,提高太阳能的利用效率。
系统能自动识别气象状况,智能的切换跟踪模式。
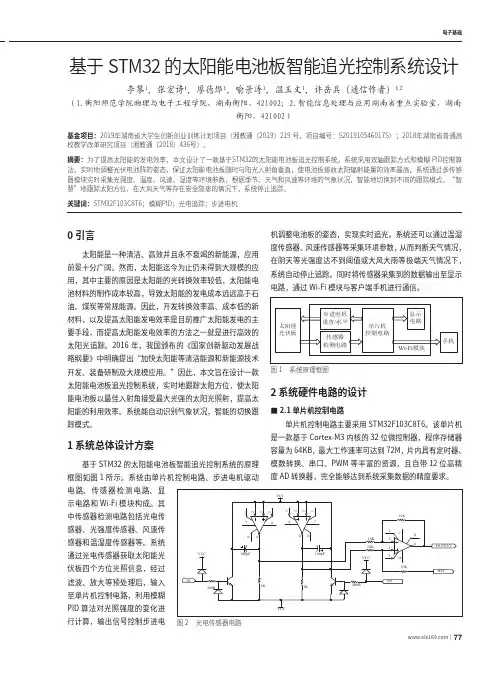
1 系统总体设计方案基于STM32的太阳能电池板智能追光控制系统的原理框图如图1电路、传感器检测电路、显示电路和Wi-Fi 模块构成。
其中传感器检测电路包括光电传感器、光强度传感器、风速传感器和温湿度传感器等。
系统通过光电传感器获取太阳能光伏板四个方位光照信息,经过滤波、放大等预处理后,输入至单片机控制电路,利用模糊PID 算法对光照强度的变化进行计算,输出信号控制步进电机调整电池板的姿态,实现实时追光。
系统还可以通过温湿度传感器、风速传感器等采集环境参数,从而判断天气情况,在阴天等光强度达不到阈值或大风大雨等极端天气情况下,系统自动停止追踪。
同时将传感器采集到的数据输出至显示电路,通过Wi-Fi 模块与客户端手机进行通信。
太阳能光伏板步进电机垂直/水平单片机控制电路传感器检测电路手机Wi-Fi 模块显示电路图1 系统原理框图2 系统硬件电路的设计■2.1 单片机控制电路单片机控制电路主要采用STM32F103C8T6。
该单片机是一款基于Cortex-M3内核的32位微控制器,程序存储器容量为64KB,最大工作速率可达到72M,片内具有定时器、模数转换、串口、PWM 等丰富的资源,且自带12位高精度AD 转换器,完全能够达到系统采集数据的精度要求。
定日镜追光发电原理
定日镜追光发电是一种利用太阳能进行发电的技术,其原理是通过聚光镜将太阳光线集中到一个小点上,然后使用热能转换器将这个小点的能量转换为热能,再用热能发动机将热能转化为电能。
具体来说,定日镜追光发电系统由定日镜、传动系统、热能转换器和热能发动机等部分组成。
当太阳光线射入定日镜并经过光学反射后,反射到集光器的中心位置处,同时热能转换器也随之产生高温。
高温的热能被传递给热能发动机,使其发生热膨胀,从而产生机械能。
最后,机械能被转换为电能输出,供应电网或用于其他设备。
定日镜追光发电原理主要依靠镜面反射和热能转换实现太阳能到电能的转换,其优点在于工作效率高、发电效果稳定、环保可靠,适合应用于太阳能发电领域的大规模项目。
基于51单片机光伏发电追光系统设计摘要:随着人们对可再生能源的需求不断增加,光伏发电系统成为了一种重要的能源供应方式。
然而,由于太阳光的不稳定性和方向性,传统的固定式太阳能发电系统效率较低。
为了提高太阳能发电效率,本文设计了一种基于51单片机的光伏发电追光系统。
通过对太阳位置的检测和控制反馈,系统可以实现对太阳位置的实时追踪和调整。
实验结果表明,该系统可以显著提高光伏发电效率,并具有较好的稳定性和可靠性。
关键词:51单片机;光伏发电;追光系统;效率提升第一章引言1.1 研究背景随着全球能源需求不断增加和环境问题日益严重,可再生能源成为了人们关注和研究的热点领域。
作为一种清洁、无污染、永无穷尽且广泛分布在地球表面上的可再生资源,太阳能被广泛认可并应用于各个领域。
光伏发电作为太阳能利用的一种重要方式,具有可再生、可持续、环保等优点,受到了广泛关注。
1.2 研究意义然而,由于太阳光的不稳定性和方向性,传统的固定式太阳能发电系统效率较低。
为了提高太阳能发电效率,追踪系统逐渐成为一种重要的解决方案。
光伏发电追踪系统可以实时检测太阳位置并对光伏板进行调整,使其始终面向太阳辐射源。
通过追踪系统对太阳位置的实时调整,可以最大限度地提高光伏板对太阳辐射的吸收利用率。
1.3 研究内容本文旨在设计一种基于51单片机的光伏发电追光系统。
通过对51单片机进行编程和控制反馈设计,实现对光伏板位置和角度的实时调整。
同时,本文还将探讨该系统在不同环境条件下的性能表现,并进行相关数据分析和优化。
第二章系统设计2.1 系统框架本文设计的基于51单片机的光伏发电追光系统主要由光敏电阻、电机、51单片机和驱动电路等组成。
光敏电阻负责检测太阳位置,51单片机负责实时控制和反馈,驱动电路负责控制电机运动。
2.2 光敏电阻光敏电阻是一种可以根据光照强度变化而改变其自身阻值的元件。
在本系统中,通过将光敏电阻安装在特定位置,可以实时检测太阳的位置。
太阳能电池板自动追踪系统结构设计1目录1.课程项目任务书 (3)2.项目选题构思 (4)2.1选题的背景依据 (4)2.2 方案的分析 (4)2.3项目规划 (4)3.项目整体设计 (5)4.项目运行 (5)4.1三维设计图 (5)4.2实物设计 (8)4.3 整体调试 (8)5.总结与体会 (9)21.课程项目任务书本学期开展可编程控制系统设计与实现课程项目,是为了培养学生运用专业知识解决实际应用的能力,进一步加强一般控制系统的安装调试技能训练,引导学生进行项目任务要求分析及项目实施工作方法选择,建立创新意识、激发其对专业学习兴趣和热情,培养学生团队的工作作风。
2.项目选题构思2.1选题的背景依据目前对于能源大多行业还在使用传统的煤炭,电能等,而现在据国务院印发的“十四五”节能减排综合工作方案的通知可以明确看出未来的能源市场会被新型的绿色能源所据,太阳能无疑是非常好的选择,但是现在的太阳能收集装置大多都是靠着大的占地面积才能收集到能源,因为太阳会随着时间偏移,使得收集能量的效率大幅降低,这对于将太阳能运用到生活中无疑是不小的缺陷,同时在操作太阳能板块时操作不规范将会导致不小的能量损失,而本次项目的设计灵感无疑是由此产生的。
2.2 方案的分析我们先设计电路,进行仿真,然后再使用三维软件搭建结构。
我们在实物的顶端全方面安装的光敏电阻,连接到arduion主板,在电脑上使用的arduion软件进行编程,同时配对适应的步进电机,光敏电阻发出信号至主板,主板根据编程带动步进电机,使太阳能板可以精准的收集太阳能,同时因为可运动的结构使得需要的占地面积得到减少,可以大幅度的提高能力的收集率。
2.3项目规划3.项目整体设计本设计采用Arduino Nono来实现控制,用光敏电阻传递信号,本项目用到了两个步进电机,一个来控制控制横向运动,一个控制纵向运动。
利用光敏电阻接收信号,根据光敏电阻的信号。
4.项目运行4.1三维设计图机械三维装配图如图4.1-4.2所示。