连续波单频和调频
- 格式:ppt
- 大小:1.91 MB
- 文档页数:7
线性调频连续波高精度炸高分选探测技术随着卫星遥感技术的快速发展,高分辨率遥感图像对于地理空间信息的获取和应用起到了至关重要的作用。
而高分选探测技术作为高分辨率遥感图像获取中的关键环节,其准确性和精度直接影响到遥感图像的质量和可用性。
线性调频连续波高精度炸高分选探测技术是一种基于雷达原理的遥感图像获取方法。
它利用雷达信号的特性,通过发射连续波信号并对反射回来的信号进行接收和处理,从而获取地表的高分辨率图像。
该技术的关键在于线性调频连续波信号的发射和接收。
线性调频连续波信号是一种具有频率连续变化的信号,通过对该信号的发射和接收,可以获取地表的散射反射信息。
在信号发射时,将频率按照一定的规律进行变化,例如线性增加或减小。
当信号遇到地表上的目标物体时,会发生散射反射,反射回来的信号会携带着目标物体的特征信息。
通过接收并处理反射回来的信号,可以获得目标物体的位置、形状等信息。
线性调频连续波高精度炸高分选探测技术相对于其他遥感图像获取方法具有明显的优势。
首先,它可以实现高分辨率的图像获取,可以捕捉到地表上更加细微的特征。
其次,该技术的探测精度高,可以准确地捕捉到目标物体的位置和形状信息。
再次,它具有较强的适应性,可以在不同环境和天气条件下进行遥感图像获取。
然而,线性调频连续波高精度炸高分选探测技术也存在一些挑战和问题。
首先,信号发射和接收的设备和系统需要具备较高的技术水平和精度。
其次,信号的传播和反射会受到地形、气象等因素的影响,需要进行复杂的校正和处理。
最后,该技术在实际应用中还需要进一步优化和改进,以适应不同的遥感图像获取需求。
综上所述,线性调频连续波高精度炸高分选探测技术是一种重要的遥感图像获取方法。
通过发射和接收线性调频连续波信号,可以获取高分辨率的地表图像,并准确地捕捉到目标物体的位置和形状信息。
然而,该技术还需要进一步研究和改进,以提高其应用的可行性和效果。
三角波线性调频连续波雷达测距仪的开题报告一、选题背景和意义雷达测距仪是一种常用的测量距离和探测静止或运动物体的设备。
随着科技的不断发展,雷达技术已经广泛应用于国防、民用、天文、气象等领域。
在雷达测距仪的测量中,线性调频连续波(LFMCW)雷达是其一种典型的测距信号模式。
传统的LFMCW雷达测距仪使用的是单频信号,虽然可观察到受测目标散射的回波信号,但受目标散射强度的限制,测距精度和分辨率容易受到限制,往往难以满足一些测量要求。
为了克服以上问题,科学研究者开始研究使用三角波信号进行LFMCW雷达信号的测距法。
三角波信号的优点在于其在频率与时间之间是线性关系,并且其频率范围可以很大,从而提高LFMCW雷达测距的精度和分辨率,有利于更精准地测距。
二、主要研究内容1. 三角波LFMCW雷达信号的原理分析对三角波LFMCW雷达信号的平均功率和功率谱进行分析,阐明其特点及在测距中的优势。
2. 系统设计与仿真首先,设计合适的三角波产生和调制电路,然后根据仿真数据调整设计参数,使系统可实现精确测距。
3. 实测数据处理和分析对实际测距数据进行采集,设计数字滤波算法和信号处理算法,提取目标距离信息,分析误差来源。
三、预期研究成果1. 成功设计和实现三角波LFMCW雷达测距仪原型机。
2. 对三角波LFMCW雷达信号的特性进行分析,评估其在测距中的性能,与传统单频LFMCW雷达进行比较,证明其在预测、定位等方面的优越性。
3. 通过测距实验,对测距数据进行处理和分析,得出测距仪的性能参数和误差来源,为今后的改进和提高提供依据。
四、研究方法1. 对LFMCW雷达测距本质进行研究,分析其特点与优势,引出三角波LFMCW雷达的思路。
2. 对数理统计知识进行学习,建立三角波LFMCW雷达信号仿真模型,用MATLAB或仿真软件进行仿真数据生成和分析。
3. 根据仿真数据建立硬件电路,进行原型机的建造,并通过实验数据检验仿真结果的准确性。
24GHz调频连续波雷达信号处理技术应用摘要:本文详细探讨了该技术在不同领域的应用,包括距离测量和目标检测、速度测量和运动分析、物体识别和分类,以及呼吸和心率监测。
关键词:24GHz调频连续波雷达;无线传感技术;信号处理技术1 24GHz调频连续波雷达信号处理技术概述24GHz调频连续波雷达是一种常用的无线传感技术,通过调频连续波原理实现对目标物体的探测和测量。
在24GHz调频连续波雷达系统中,信号处理是至关重要的一步,用于提取目标信息并实现距离测量、速度测量、目标检测和跟踪等功能。
以下是24GHz调频连续波雷达信号处理技术的概述:(1)数据采集与预处理接收原始信号:使用接收天线接收目标反射回来的信号,并将其转换为电信号。
信号预处理:对接收到的信号进行滤波、放大和采样等预处理步骤,以优化信号质量。
(2)时域信号处理距离测量:利用时延测量技术,计算目标物体与雷达之间的距离。
常用的方法包括时差测量和相关分析等。
目标检测和跟踪:通过分析信号强度的变化,检测和跟踪目标物体。
常用的方法包括门限检测、运动检测和滤波技术等。
(3)频域信号处理快速傅里叶变换(FFT):将时域信号转换为频域信号,用于频谱分析和频率成分的提取。
目标参数估计:通过分析频域信号的特征,估计目标物体的速度、角度、尺寸等参数。
常用的方法包括多普勒频移测量和高阶谱分析等。
(4)目标信号处理目标分离和提取:通过信号处理技术将目标信号从背景杂波中分离出来,以便进行后续分析和识别。
目标识别和分类:通过分析目标的特征和模式,将目标物体进行识别和分类。
常用的方法包括模式识别、机器学习和人工智能等。
(5)数据分析和可视化数据分析:对处理后的数据进行统计分析、特征提取和模式识别等,以获取更多的目标信息。
结果可视化:将处理和分析得到的结果进行可视化展示,如雷达图、距离-速度图等,以便用户直观地理解和使用。
2 24GHz调频连续波雷达信号处理技术的应用领域2.1 距离测量和目标检测距离测量和目标定位:24GHz调频连续波雷达可以用于精确测量目标与雷达之间的距离。
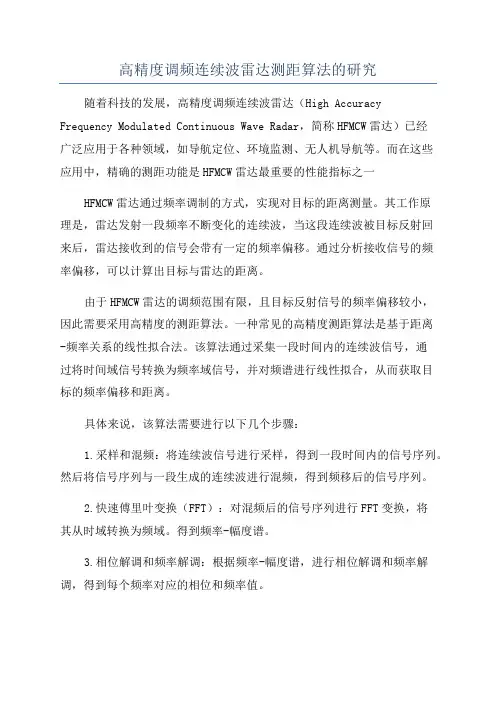
高精度调频连续波雷达测距算法的研究随着科技的发展,高精度调频连续波雷达(High Accuracy Frequency Modulated Continuous Wave Radar,简称HFMCW雷达)已经广泛应用于各种领域,如导航定位、环境监测、无人机导航等。
而在这些应用中,精确的测距功能是HFMCW雷达最重要的性能指标之一HFMCW雷达通过频率调制的方式,实现对目标的距离测量。
其工作原理是,雷达发射一段频率不断变化的连续波,当这段连续波被目标反射回来后,雷达接收到的信号会带有一定的频率偏移。
通过分析接收信号的频率偏移,可以计算出目标与雷达的距离。
由于HFMCW雷达的调频范围有限,且目标反射信号的频率偏移较小,因此需要采用高精度的测距算法。
一种常见的高精度测距算法是基于距离-频率关系的线性拟合法。
该算法通过采集一段时间内的连续波信号,通过将时间域信号转换为频率域信号,并对频谱进行线性拟合,从而获取目标的频率偏移和距离。
具体来说,该算法需要进行以下几个步骤:1.采样和混频:将连续波信号进行采样,得到一段时间内的信号序列。
然后将信号序列与一段生成的连续波进行混频,得到频移后的信号序列。
2.快速傅里叶变换(FFT):对混频后的信号序列进行FFT变换,将其从时域转换为频域。
得到频率-幅度谱。
3.相位解调和频率解调:根据频率-幅度谱,进行相位解调和频率解调,得到每个频率对应的相位和频率值。
4.线性拟合:根据相位和频率值,进行线性拟合,得到拟合的斜率和截距。
根据斜率值就可以获得目标的距离值。
需要注意的是,HFMCW雷达测距的精度还受到一些误差的影响,如多径效应、杂散信号等。
为了减小误差的影响,可以采取一些技术手段,如选择合适的调制波形、增加信道带宽、加大数据采样率等。
总结起来,高精度调频连续波雷达的测距算法主要是基于距离-频率关系的线性拟合法。
通过采样、混频、FFT变换等步骤,获取到频率-幅度谱,然后进行相位解调、频率解调和线性拟合,最终得到目标的距离值。
1 雷达原理笔记之LFMCW雷达测距测速
1 雷达原理笔记之LFMCW雷达测距测速
1.1 单边扫频锯齿波
1.1.1 静止目标回波分析
1.1.2 运动目标回波分析
1.1.3 优缺点分析
1.2 双边扫频三角波
1.2.1 运动目标回波分析
调频连续波雷达在当今的雷达行业仍占有较高的地位。
由于其无盲区测距的巨大优势,现在人们更多地将其应用在车载雷达行业。
调频连续波雷达现在主要有单边扫频(锯齿波)和双边扫频(三角波)两种调制形式。
1.1 单边扫频锯齿波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.1.1 静止目标回波分析
静止目标(或者径向速度为0)的目标没有多普勒频移,因此回波信号在频率轴没有频移而只是在时间上延后时间。
雷达接收机前端将发射信号和回波信号进行混频得到差拍频率。
有如下关系式:
由此可以解得:
由此便可求出距离目标的距离。
而静止目标(或者径向速度为0)。
与脉冲体制雷达一样,单边扫频锯齿波雷达同样存在蹴鞠模糊问题:
当回波信号的时间延迟大于单边扫频锯齿波雷达的周期时会出现距离测量的模糊现象。
真实目标距离与测量值相差整数个最大不模糊距离()。
1.1.2 运动目标回波分析
由上图可以清楚地看出,目标的多普勒频移、差拍频率以及回波延时,满足如下关系:
进一步整理,得到:
1.2 双边扫频三角波
上图就是典型的单边扫频连续波雷达的图像,调频斜率。
1.2.1 运动目标回波分析
根据上图可以清楚的看出、、、有如下关系:。
SiLC 宣布在单芯片上集成1550nm 调频连续波
LiDAR 功能
SiLC 提供了虚拟世界和现实世界融合的新视角
- 拥有20 年光电子行业经验的资深专家为传感行业树立了新的性能和人眼安全标准- SiLC 的芯片可轻松迁移至1550nm,并能在更低功耗下,将探测范围扩大一倍据麦姆斯咨询报道,美国硅光子学创业公司SiLC Technologies (以下简称SiLC)是一家基于硅光子技术的集成4D 视觉解决方案供应商,
近日SiLC 宣布在单芯片上集成了1550nm 调频连续波(FMCW)激光雷达(LiDAR)功能。
利用1550nm 波长FMCW 技术,SiLC 的视觉传感器展示了LiDAR 技术
的未来,其安全性、性能和探测范围得到了显着提高,而其完整集成实现了
低成本、低功耗和紧凑的尺寸。
SiLC 的硅基集成平台有望革新LiDAR 市场
的高成本问题,在消费类、工业、机器人和安全领域实现广泛的应用。
SiLC 将在2019 年消费电子展(CES)上,通过其集成的4D 视觉传感器测试芯片展示创纪录的性能。
在CES 2019 上,SiLC 将展示其4D 视觉传感器芯片,实现探测范围扩。
fmcw表达式摘要:一、FMCW(调频连续波)基本概念1.FMCW 技术简介2.FMCW 在通信和雷达领域的应用二、FMCW 表达式的推导与分析1.FMCW 信号的数学表达式2.FMCW 信号的频谱特性3.FMCW 信号的调制与解调过程三、FMCW 技术的优缺点及发展前景1.FMCW 技术的优势2.FMCW 技术的局限性3.FMCW 技术的发展趋势与应用领域正文:FMCW(调频连续波)是一种在通信和雷达领域广泛应用的技术。
通过调整信号的频率来传输信息,FMCW 技术具有较高的可靠性和灵活性。
本篇文章将详细介绍FMCW 的基本概念、表达式的推导与分析,以及FMCW 技术的优缺点和发展前景。
首先,我们来了解FMCW 的基本概念。
FMCW 技术通过连续改变信号的频率来传输信息。
在通信领域,这种技术可以实现高速数据传输,提高信道容量;在雷达领域,FMCW 技术可以实现距离测量和速度测量,具有较高的精度和抗干扰能力。
接下来,我们推导并分析FMCW 表达式。
FMCW 信号的数学表达式为:s(t) = A * cos(2πf0t + φ) * exp(-j * 2π * fc * t),其中A 为信号幅值,f0 为载波频率,φ为初始相位,fc 为频率调制频率。
FMCW 信号的频谱特性表明,频率调制会导致信号的频谱宽度发生变化,从而实现多普勒效应。
在FMCW 信号的调制与解调过程中,通常采用锁相环(PLL)技术实现频率的同步解调,恢复原始信号。
最后,我们来探讨FMCW 技术的优缺点及发展前景。
FMCW 技术具有以下优势:较高的数据传输速率、较强的抗干扰能力、较高的测量精度。
然而,FMCW 技术也存在一定的局限性,如频率调制导致的频谱宽度变化、多普勒效应的测量误差等。
尽管如此,随着科技的发展,FMCW 技术在通信、雷达和其他领域中的应用将会越来越广泛。
综上所述,FMCW 技术是一种具有广泛应用前景的技术,通过调整信号的频率来实现信息的传输与处理。